Politechnika Lubelska |
Laboratorium Napędu Elektrycznego |
|||
w Lublinie |
Ćwiczenie Nr 20 |
|||
Wykonali: Jędruchniewicz G, Blachani M, Bryda A, Janicki T |
Semestr VI |
Grupa ED 6.3 |
Rok akad. 1997/98 |
|
Temat ćwiczenia: Regulacja prędkości kątowej obcowzbudnego silnika prądu stałego za pomocą przerywacza tyrystorowego. |
Data wykonania: 4.03.1998r |
Ocena
|
||
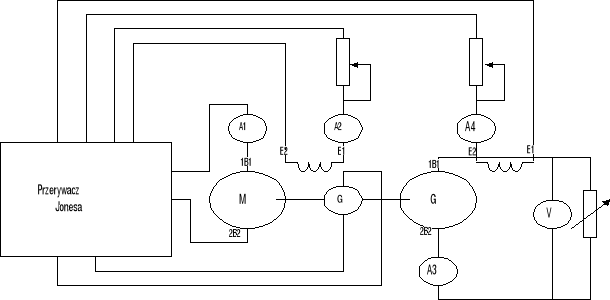
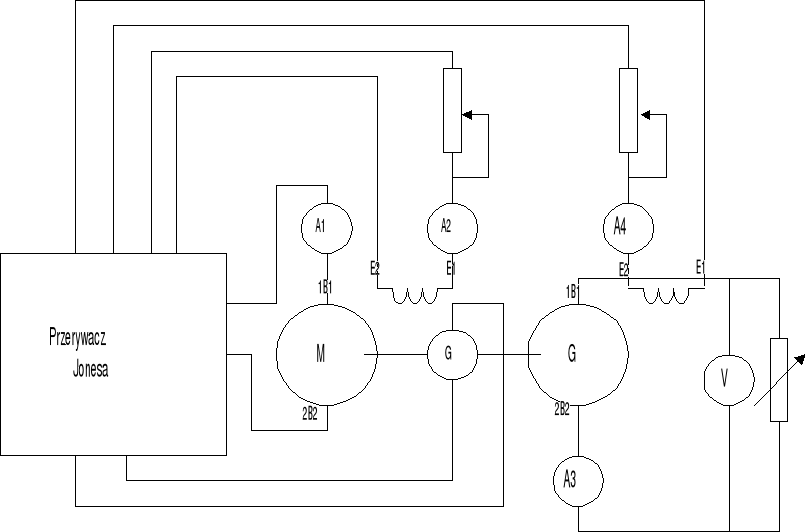
Schemat układu pomiarowego:
Dane znamionowe elementów układu:
Prądnica: Silnik:
IN = 6,25 A IN = 6,25 A
PN = 1,1 kW PN = 1,1 kW
n = 1450 obr/min n = 1450 obr/min
IW = 0,29 A IW = 0,29 A
UN = 220 V UN = 220 V
1.Wyznaczanie charakterystyk mechanicznych silnika obcowzbudnego zasilanego impulsowo.
a) układ otwarty
a = 0.94
L.p |
US |
UM |
IM |
UH |
IH |
PH |
ΣΔPH |
Uω |
ω |
M |
|
V |
V |
A |
V |
A |
W |
W |
V |
rad/s |
Nm |
1 |
|
220 |
1 |
215 |
0 |
0 |
113 |
160 |
167,5 |
0,67 |
2 |
|
220 |
1,5 |
215 |
0,5 |
107,5 |
112,4 |
158 |
165,3 |
1,33 |
3 |
|
220 |
2 |
206 |
1 |
206 |
114,2 |
157 |
164,3 |
1,94 |
4 |
|
220 |
2,5 |
201 |
1,5 |
301,5 |
117 |
155 |
162,2 |
2,58 |
5 |
6,2 |
220 |
3 |
200 |
2 |
400 |
121,6 |
154 |
161,1 |
3,23 |
6 |
|
220 |
3,5 |
198 |
2,5 |
497,5 |
126,7 |
152 |
159 |
3,92 |
7 |
|
218 |
4 |
194 |
3 |
582 |
134,1 |
151 |
158 |
4,53 |
8 |
|
216 |
4,5 |
190 |
3,5 |
665 |
142,8 |
150 |
157 |
5,14 |
9 |
|
215 |
5,1 |
186 |
4 |
744 |
153,2 |
149 |
155,9 |
5,75 |
10 |
|
214 |
5,6 |
184 |
4,5 |
828 |
166,3 |
149 |
155,9 |
6,37 |
Przykładowe obliczenia:
PH = IH⋅UH = 215V*0,5A = 107,5W
ΣΔPH = ΔPo + ΔPobc = 111W+ 1,4W = 112,4
ΔPobc = Ih2⋅RTH = (0,5A)2*5,6Ω = 1,4W
M = [PH+ΣΔPH]/ω = [107,5 + 112,5]/165,3 = 1,33 Nm
a = 0.85
L.p |
US |
UM |
IM |
UH |
IH |
PH |
ΣΔPH |
Uω |
ω |
M |
|
V |
V |
A |
V |
A |
W |
W |
V |
rad/s |
Nm |
1 |
|
220 |
0,95 |
215 |
0 |
0 |
111 |
158 |
165,3 |
0,67 |
2 |
|
219 |
1,45 |
210 |
0,5 |
105 |
109,4 |
155 |
162,2 |
1,32 |
3 |
|
218 |
2 |
206 |
1 |
204 |
110,6 |
153 |
160,1 |
1,96 |
4 |
|
215 |
2,5 |
201 |
1,5 |
301,5 |
114 |
152 |
159 |
2,61 |
5 |
5,6 |
214 |
3 |
199 |
2 |
398 |
117,6 |
150 |
157 |
3,28 |
6 |
|
213 |
3,5 |
194 |
2,5 |
485 |
123,6 |
149 |
155,9 |
3,9 |
7 |
|
211 |
4 |
190 |
3 |
570 |
131,1 |
148 |
154,9 |
4,52 |
8 |
|
210 |
4,5 |
187 |
3,5 |
654,5 |
139,8 |
147 |
154,8 |
5,13 |
9 |
|
210 |
5,1 |
184 |
4 |
736 |
150,2 |
146 |
152,8 |
5,79 |
10 |
|
209 |
5,6 |
180 |
4,5 |
810 |
163,3 |
145 |
151,7 |
6,41 |
a = 0.6
L.p |
US |
UM |
IM |
UH |
IH |
PH |
ΣΔPH |
Uω |
ω |
M |
|
V |
V |
A |
V |
A |
W |
W |
V |
rad/s |
Nm |
1 |
|
212 |
0,95 |
210 |
0 |
0 |
108 |
154 |
161,1 |
0,67 |
2 |
|
210 |
1,45 |
202 |
0,5 |
101 |
105,4 |
151 |
158 |
1,3 |
3 |
|
208 |
1,95 |
196 |
1 |
196 |
107,6 |
149 |
155,9 |
1,94 |
4 |
|
204 |
2,45 |
190 |
1,5 |
285 |
108 |
145 |
151,7 |
2,59 |
5 |
3,75 |
198 |
3 |
182 |
2 |
364 |
108,6 |
140 |
146,5 |
3,22 |
6 |
|
190 |
3,45 |
170 |
2,5 |
425 |
109,7 |
133 |
139,2 |
3,84 |
7 |
|
180 |
3,95 |
160 |
3 |
480 |
114,1 |
128 |
133,9 |
4,43 |
8 |
|
175 |
4,45 |
150 |
3,5 |
525 |
116,8 |
120 |
125,6 |
5,1 |
9 |
|
170 |
5 |
142 |
4 |
568 |
126,2 |
118 |
123,5 |
5,62 |
10 |
|
165 |
5,5 |
135 |
4,5 |
607,5 |
134,3 |
112 |
117,2 |
6,33 |
Charakterystyki mechaniczne układu otwartego dla różnych wartości współczynnika „a”

b) układ automatycznej regulacji
Lp |
US |
UM |
IM |
UH |
IH |
PH |
ΣΔPH |
Uω |
ω |
M |
|
V |
V |
A |
V |
A |
W |
W |
V |
rad/s |
Nm |
1 |
4,2 |
212 |
1,75 |
204 |
1 |
204 |
108,6 |
151 |
158 |
1,97 |
2 |
4,9 |
215 |
2,45 |
200 |
1,5 |
300 |
113,6 |
151 |
158 |
2,61 |
3 |
5,6 |
215 |
3 |
196 |
2 |
392 |
117,6 |
150 |
157 |
3,24 |
4 |
5,6 |
215 |
3,5 |
195 |
2,5 |
487,5 |
124,7 |
150 |
157 |
3,89 |
5 |
5,6 |
215 |
4 |
194 |
3 |
582 |
133,1 |
150 |
157 |
4,55 |
6 |
5,4 |
209 |
4,5 |
185 |
3,5 |
647,5 |
140,8 |
148 |
154,9 |
5,09 |
7 |
5,3 |
209 |
5,1 |
183 |
4 |
732 |
150,2 |
145 |
151,7 |
5,81 |
8 |
5,5 |
209 |
5,6 |
180 |
4,5 |
810 |
163,3 |
145 |
151,7 |
6,41 |
L.p |
US |
UM |
IM |
UH |
IH |
PH |
ΣΔPH |
Uω |
ω |
M |
|
V |
V |
A |
V |
A |
W |
W |
V |
rad/s |
Nm |
1 |
3,2 |
202 |
1,9 |
191 |
1 |
191 |
103,6 |
146 |
152,8 |
1,92 |
2 |
3,6 |
202 |
2,4 |
191 |
1,5 |
286,5 |
108 |
146 |
152,8 |
2,58 |
3 |
4 |
205 |
2,85 |
190 |
2 |
380 |
112,6 |
145 |
151,7 |
3,24 |
4 |
4,4 |
205 |
3,4 |
188 |
2,5 |
470 |
119,7 |
145 |
151,7 |
3,88 |
5 |
4,7 |
205 |
4 |
185 |
3 |
555 |
128,1 |
145 |
151,7 |
4,5 |
6 |
5,1 |
207 |
4,5 |
184 |
3,5 |
644 |
137,8 |
145 |
151,7 |
5,15 |
7 |
4,8 |
200 |
5 |
175 |
4 |
700 |
145,2 |
140 |
146,5 |
5,77 |
8 |
4,9 |
199 |
5,5 |
171 |
4,5 |
769,5 |
157,3 |
139 |
145,4 |
6,31 |
L.p |
US |
UM |
IM |
UH |
IH |
PH |
ΣΔPH |
Uω |
ω |
M |
|
V |
V |
A |
V |
A |
W |
W |
V |
rad/s |
Nm |
1 |
2 |
177 |
2 |
168 |
1 |
168 |
88,6 |
128 |
133,9 |
1,91 |
2 |
2,6 |
180 |
2,4 |
166 |
1,5 |
249 |
93 |
128 |
133,9 |
2,55 |
3 |
3 |
170 |
2,8 |
165 |
2 |
330 |
98,6 |
128 |
133,9 |
3,2 |
4 |
3,4 |
170 |
3,4 |
163 |
2,5 |
407,5 |
105,7 |
128 |
133,9 |
3,83 |
5 |
3,8 |
180 |
3,9 |
160 |
3 |
480 |
114,1 |
128 |
133,9 |
4,43 |
6 |
4,1 |
181 |
4,4 |
158 |
3,5 |
553 |
123,8 |
128 |
133,9 |
5,05 |
7 |
4,1 |
180 |
4,9 |
150 |
4 |
600 |
130,2 |
122 |
127,6 |
5,72 |
8 |
4,1 |
175 |
5,5 |
145 |
4,5 |
652,5 |
141,3 |
120 |
125,6 |
6,32 |
Charakterystyki UAR dla różnych nastaw współczynnika „a”

2.Pomiar charakterystyk regulacyjnych układu napędowego ω = f (a).
L.p |
US |
IM |
Uω |
ω |
a |
|
L.p |
US |
IM |
Uω |
ω |
a |
|
V |
A |
V |
rad/s |
- |
|
|
V |
A |
V |
rad/s |
- |
1 |
0 |
|
68 |
71,1 |
0,05 |
|
1 |
0 |
|
35 |
36,6 |
0,05 |
2 |
1 |
|
81 |
84,7 |
0,2 |
|
2 |
1 |
|
52 |
54,4 |
0,2 |
3 |
2 |
|
100 |
104,6 |
0,33 |
|
3 |
2 |
|
73 |
76,4 |
0,33 |
4 |
3 |
3,1 |
125 |
130,8 |
0,48 |
|
4 |
3 |
6,2 |
92 |
96,2 |
0,48 |
5 |
4 |
|
145 |
151,7 |
0,62 |
|
5 |
4 |
|
118 |
123,5 |
0,62 |
6 |
5 |
|
150 |
157 |
0,76 |
|
6 |
5 |
|
140 |
146,5 |
0,76 |
7 |
6 |
|
151 |
158 |
0,91 |
|
7 |
6 |
|
150 |
157 |
0,91 |
8 |
6,4 |
|
153 |
160,1 |
0,98 |
|
8 |
6,4 |
|
150 |
157 |
0,98 |
Przebieg charakterystyk regulacyjnych dla prądu IN oraz 0,5 IN.

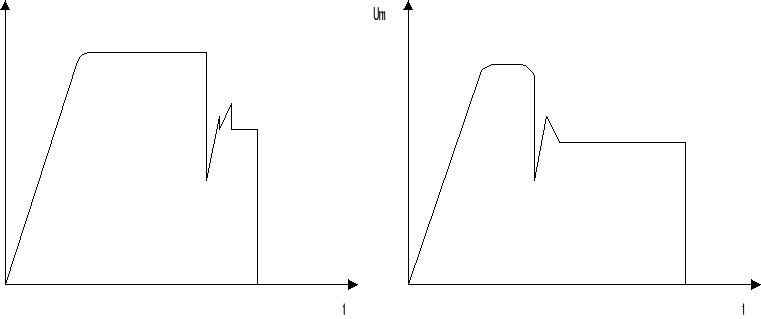
Przebiegi napięcia UM zdjęte z oscyloskopu
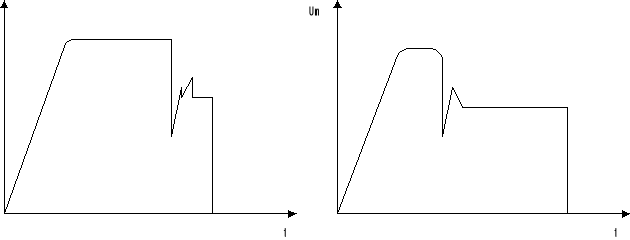
Us = 0,8V Uω = 80V Us = 4V Uω = 120V
Wnioski:
Pracę napędu w układzie otwartym badaliśmy przy różnych współczynnikach wypełnienia, możemy stwierdzić że w przypadku gdy „a” jest zbliżony do jedności to praca przebiega stabilnie i zmiany prędkości kątowej w wyniku zwiększania obciążenia są małe w porównaniu ze zmianami prędkości gdy współczynnik przyjmuje wartości niższe (ok. 0,5 i niższe). Praca w układzie automatycznej regulacji przebiega jednakowo stabilnie dla wszystkich nastaw współczynnika wypełnienia, choć obserwujemy w końcowych fazach wszystkich charakterystyk zmniejszenie prędkości podczas wzrostu momentu.
Jak widać z charakterystyk regulacyjnych zwiększanie współczynnika wypełnienia pozwala na wzrost prędkości, w naszym przypadku prędkość była większa dla połowy prądu znamionowego silnika.
W wyniku złego przerysowania przebiegu napięcia z oscyloskopu nie potrafię określić częstotliwości impulsowania przerywacza Jonesa. W ćwiczeniu nie zdjęliśmy też przebiegu prądu (przerysowany przebieg im znacznie odbiega od przebiegów przedstawionych w skrypcie więc nie umieszczałem go w sprawozdaniu).
Wyszukiwarka
Podobne podstrony:
regulacja prędkości kątowej obcowzbudnego silnika prądu stałego za pomocą przerywacza tyrystorowego
Regulacja prędkości kątowej obcowzbudnego silnika prądu stałego za pomocą przerywacza tyrystorowego
Regulacja prędkosci katowej obcowzbudnego silnika, Politechnika Lubelska
Regulacja prędkosci katowej obcowzbudnego silnika, Politechnika Lubelska
UKŁAD NAPĘDU SILNIKA PRĄDU STAŁEGO STEROWANEGO Z WYKORZYSTANIEM PRZERYWACZA Z SPRZĘŻENIAMI PRĄDOWYM
BADANIE UKLADU NAPEDOWEGO Z SILNIKIEM PRADU STALEGO ZASILANYM Z NAWROTNEGO PRZEKSZTALTNIKA TYRYSTORO
Układ automatycznej regulacji prędkości obrotowej silnika prądu stałego
Badanie regulatora PID w układzie sterowania prędkością obrotową silnika prądu stałego
REGULACJA PRĘDKOŚCI SILNIKÓW PRĄDU STAŁEGO
Regulacja prędkości kątowej silników indukcyjnych w układach kaskadowych – kaskada stałomomentowax
sprawozdanie silnik prądu stałego obcowzbudny rozruch?z obciążenia na wale pomiary dynamiczne
Regulacja prędkości kątowej silnika asn
Automatyka Układ automatycznej regulacji w silnikach prądu stałego
Czestotliwosciowa regulacja predkosci katowej silnika indukcyjnego
silniki prądu stałego
silnik pradu stalego
więcej podobnych podstron