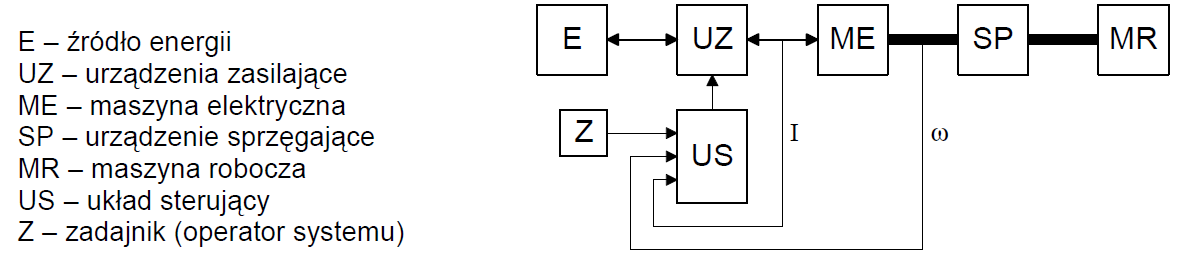
Schemat blokowy układu napędowego
Jaki wpływ na charakter odpowiedzi mają wartości własne równania charakterystycznego napędu z obcowzbudną maszyna prądu stałego
Wartościami własnymi układu są miejsca zerowe wielomianu charakterystycznego układu, czyli pierwiastki równania charakterystycznego. Wartości własne układu są zarazem wartościami własnymi macierzy układu.
Gdy
pierwiastki s1 i s2 leżą blisko siebie otrzymujemy odpowiedz z
przebiegiem inercyjnym I-rzędu
(Δ dąży do 0).
Gdy
pierwiastki s1 i s2 leżą daleko od siebie otrzymujemy odpowiedz z
przebiegiem inercyjnym II-rzędu
(Δ>>0).
Gdy
pierwiastki s1 i s2 leżą daleko siebie otrzymujemy odpowiedz z
przebiegiem inercyjnym I-rzędu
(Δ<0).
W jaki sposób wyznaczyć transmitancję operatorową prądu twornika przy wymuszeniu od momentu zewnętrznego
Transmitancja operatorowa jest to stosunek transformaty Laplce’a sygnału wyjściowego do wejściowego przy zerowych warunkach początkowych
 - wymuszenie( sygnał wejściowy)
- wymuszenie( sygnał wejściowy)
 - prąd twornika( sygnał wyjściowy)
- prąd twornika( sygnał wyjściowy)
Jak napisać można funkcję zmian prędkości w czasie podczas rozruchu układu napędowego prądu stałego z dużą rezystancją w obwodzie wirnika?

 - elektromechaniczna stała czasowa
- elektromechaniczna stała czasowa
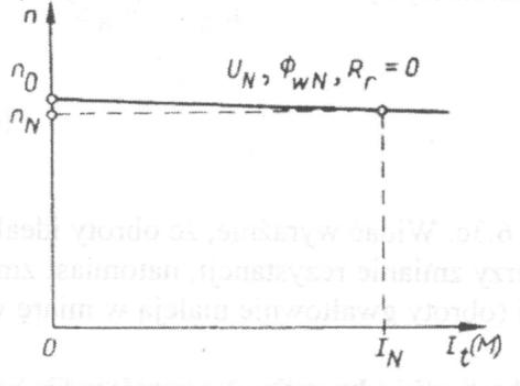
charakterystyka
prędkości kątowej w funkcji czasu

Jaka jest idea sterowania wektorowego maszyn indukcyjnych?
Idea tej metody oparta jest na analogi do obcowzbudnego silnika prądu stałego, którego właściwości są następujące:
Układ ma dwa wejścia sterujące: uzwojenie wzbudzenia i twornika
Obydwa wejścia są magnetycznie i elektrycznie odprzężone
Moment elektromagnetyczny jest iloczynem strumienia wzbudzenia i prądu twornika
Wektory strumienia wzbudzenia oraz prądu twornika są nieruchome i ortogonalne względem siebie
Regulatory w obwodach wzbudzenia i twornika pozwalają uzyskiwać szybkie odpowiedzi
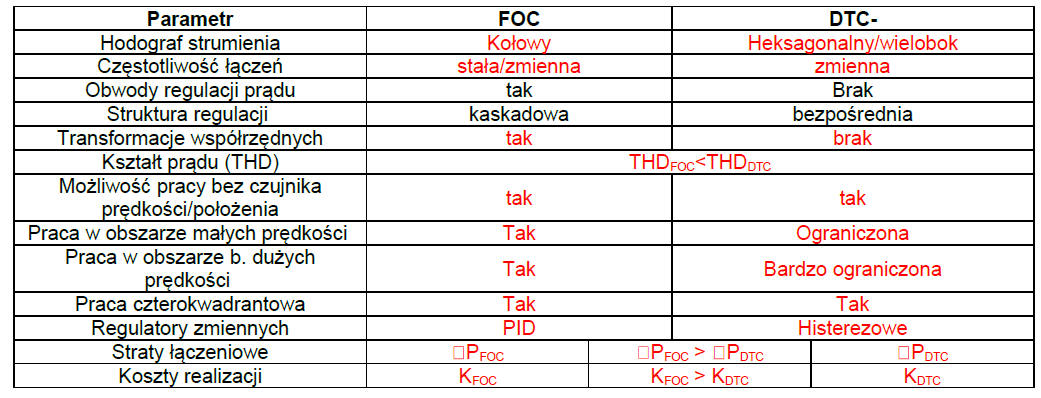
Wymień różnice pomiędzy sterowanie bezpośrednim a FOC
Jakie układy przekształtnikowe współpracują z układami generatorów umożliwiają regulację mocy biernej.
układy przekształtnikowe o sterowaniu wektorowym - najnowsze układy przekształtnikowych systemów generacji charakteryzują szerokie możliwości regulacji chwilowej wartości generowanej mocy czynnej i biernej. Pozwala to na kształtowanie kąta mocy, co korzystnie wpływa na stabilizację napięcia w sieci. Takie układy mogą aktywnie uczestniczyć w zrównoważeniu mocy biernej i ograniczyć koszty związane z zakupem dodatkowych kompensatorów i filtrów. Rozwiązania te ograniczają również niekorzystne efekty przejściowe w stanach dynamicznych oraz gwarantują pracę w okolicach maksymalnych wartości współczynnika wykorzystania energii wiatru cp
Jakie maszyny stosuje się w wolnoobrotowych generatorach elektrowni wiatrowych i czym charakteryzują się te układy?
stosuje się generatory pracujące ze zmienną w szerokich granicach prędkością kątową?
W przypadku elektrowni o zmiennej prędkości obrotowej generator łączony jest z siecią pośrednio, za pomocą układu falownikowego. Pozwala to na dostosowanie prędkości wirnika, do aktualnej prędkości wiatru, tak aby w zakresie prędkości wiatru poniżej znamionowej, uzyskiwać maksymalny współczynnik wykorzystania energii niesionej przez wiatr.
Elektrownie wiatrowe o zmiennej prędkości obrotowej mają następujące zalety:
|
- |
Większy zysk energii (10-15 %) |
|
- |
Mniejsze naprężenia mechaniczne (po podmuchu wiatru, zamiast skoku momentu występuje przyspieszenie prędkości wirnika) |
|
- |
Oddawana moc jest bardziej stabilna (wirnik zachowuje się jako pośredni magazyn energii) |
|
- |
Mniejsza hałaśliwość (możliwość ograniczenia hałasu w godzinach nocnych przez zmniejszenie prędkości obrotowej wirnika) |
|
- |
Całość pracuje z większą sprawnością, wykorzystując większą ilość energii zawartej w wietrze. |
Na rysunku przedstawione są korzyści wynikające z zastosowania elektrowni o zmiennej prędkości obrotowej z kontrolą mocy typu „pitch” w porównaniu z elektrownią o stałej prędkości obrotowej z kontrolą mocy typu „stall”.
Wykres przedstawia jaką moc uzyskujemy z elektrowni przy określonej prędkości wiatru. Maszyna pracującą ze zmienną prędkością obrotową pracuje z tak dobranymi obrotami, żeby współczynnik wykorzystania wiatru był jak najwyższy. Wirnik pracujący ze stałą prędkością obrotową, ma jeden tylko taki punkt w którym współczynnik wykorzystania wiatru jest największy (tu oba wykresy są zbliżone). W pozostałych przypadkach, pracuje on z mniejszą sprawnością. Poza tym następują wahania mocy przy prędkościach wiatru przekraczających wartość nominalną. Biorąc pod uwagę roczną produkcje energii elektrownia pracująca ze zmienna prędkością obrotową, dostarczy więcej energii w ciągu roku.
Wymień dwie transformację, które stosujemy w klasycznym układzie sterowania wektorowego FOC
Transformata Clarke’a i Parka.
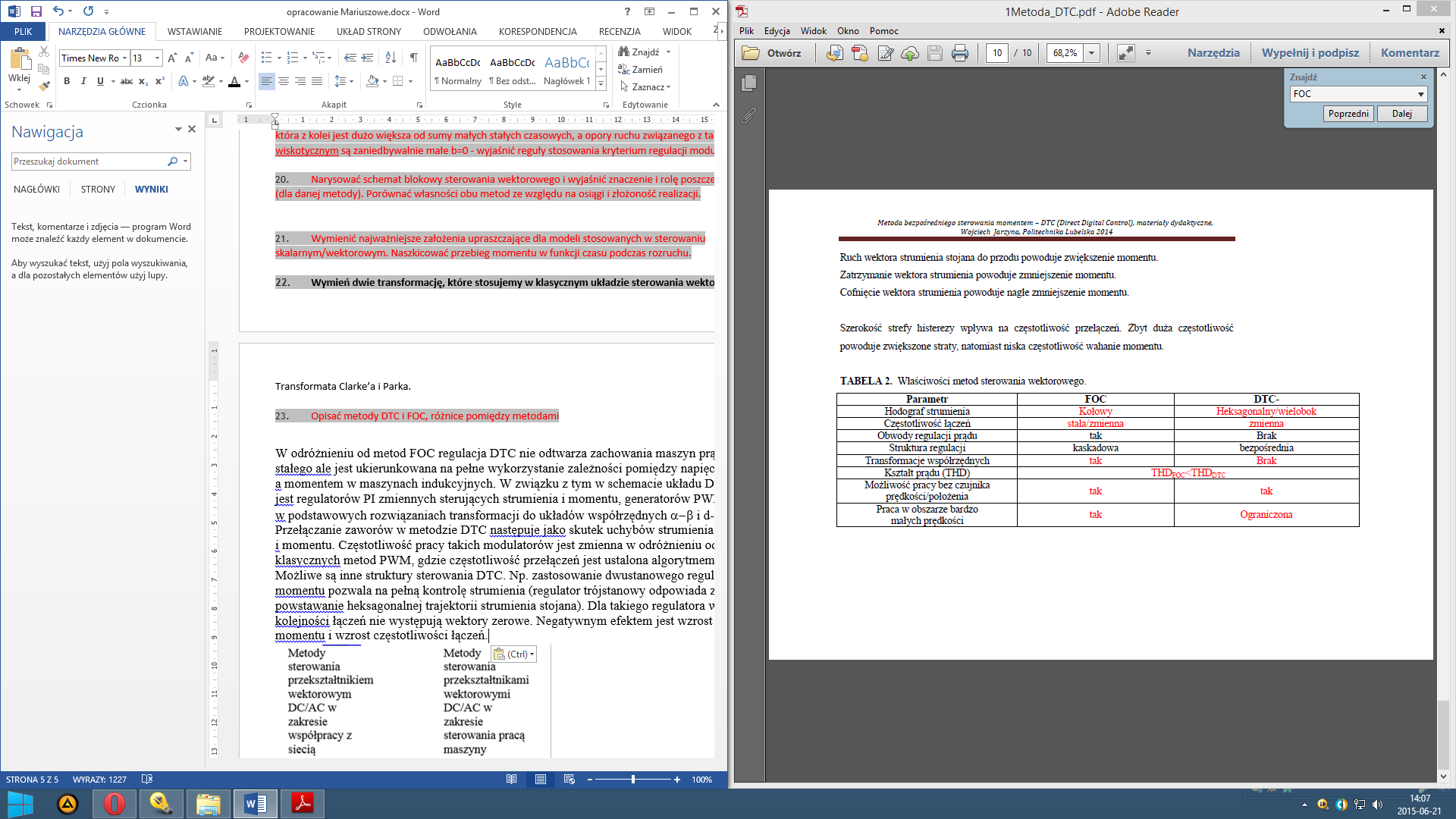
Opisać metody DTC i FOC, różnice pomiędzy metodami
W odróżnieniu od metod FOC regulacja DTC nie odtwarza zachowania maszyn prądu
stałego ale jest ukierunkowana na pełne wykorzystanie zależności pomiędzy napięciem
a momentem w maszynach indukcyjnych. W związku z tym w schemacie układu DTC brak
jest regulatorów PI zmiennych sterujących strumienia i momentu, generatorów PWM oraz
w podstawowych rozwiązaniach transformacji do układów współrzędnych i d-q.
Przełączanie zaworów w metodzie DTC następuje jako skutek uchybów strumienia
i momentu. Częstotliwość pracy takich modulatorów jest zmienna w odróżnieniu od
klasycznych metod PWM, gdzie częstotliwość przełączeń jest ustalona algorytmem.
Możliwe są inne struktury sterowania DTC. Np. zastosowanie dwustanowego regulatora
momentu pozwala na pełną kontrolę strumienia (regulator trójstanowy odpowiada za
powstawanie heksagonalnej trajektorii strumienia stojana). Dla takiego regulatora w tablicy
kolejności łączeń nie występują wektory zerowe. Negatywnym efektem jest wzrost tętnienia
momentu i wzrost częstotliwości łączeń.
wymień podobieństwa i różnice pomiędzy napędem maszyny prądu stałego klasyczną DC a BLDC
Różnice:
- brak komutatora mechanicznego, który w tradycyjnych silnikach prądu stałego jest elementem kłopotliwym w eksploatacji,
- brak szczotek,
- stosunkowa wysoka sprawność( brak strat energii na wytworzenie strumienia wzbudzenia),
- silnik bez szczotkowy ma nieruchomy uzwojony stojan i wirujący magnes trwały,
- magnesy stałe klejone do wirnika, w zwykłym magnesy w stojanie.
- silnik BLDC wymaga informacji na temat położenia wirnika,
Podobieństwa:
- składa się ze stojana i wirnika,
- oba są zasilane prądem stałym,
Narysować bloki przetwarzania (transmitancji), które stosujemy w klasycznym układzie sterowania wektorowego FOC
Schemat blokowy maszyny prądu DC, wzory elektryczne i po przekształceniu Laplace'a, odpowiedz skokowa G(S) i Ω(S)
W jakim celu stosuje się linearyzację układu napędowego?
Odp. W celu zbadania stabilności układu, na podstawie badania stabilności jego liniowej aproksymacji.
Narysować przykładową charakterystykę mechaniczną układu napędowego z silnikiem obcowzbudnym prądu stałego w układzie otwartym przy znamionowym zasilaniu oraz charakterystyką układu zasilania tranzystorowego pracującego ze sprzężeniem prędkościowym
Narysować charakterystykę mechaniczną układu napędowego z silnikiem obcowzbudnym prądu stałego, oraz char. układu napędowego zasilanego z zasilacza tranzystorowego pracującego z ujemnym sprzężeniem zwrotnym
Jaki wpływ ma charakter odpowiedzi mają wartości własne równania charakterystycznego? Podać przypadki dla równości postaci…
Wyznaczyć transmitancję operatorową układu napędowego z silnikiem obcowzbudnym DC zasilonym z prostownika 6pulsowego. Założyć, że moment bezwładności MR jest dużo mniejszy od momentu bezwładności silnika. Układ otwarty
Jak obliczyć odpowiedź układu napędowego przy jednoczesnym działaniu wymuszenia napięciowego i od momentu zewnętrznego?
Odpowiedź układu dla wielu wymuszeń można wyznaczyć za pomocą superpozycji, czyli odpowiedź jest równa sumie odpowiedzi na każde z wymuszeń. Obiekt musi być liniowy.
Jakie negatywne efekty mogą powstać, gdy układ napędowy prądu stałego ze sprzężeniem prędkościowym pracuje ze zbyt dużym wzmocnieniem regulatora typy P
Zbyt duża wartość wzmocnienia regulatora prędkości typu P spowoduje wystąpienie dużych oscylacji. Będą to oscylacje tłumione, lecz długotrwałe.
LUB???
Ujemne
sprzężenie zwrotne prędkościowe powoduje usztywnienie
charakterystyk mechanicznych. Natomiast ujemne prądowe sprzężenie
zwrotne zdecydowanie zwiększa ustępliwość charakterystyk
(regulator stabilizuje prąd na określonym poziomie i po
przekroczeniu określonej wartości momentu następuje gwałtowny
spadek prędkości obrotowej)
W jakim celu stosujemy transformację dla układu przestrzennego wirującego układu.
Wymienić podobieństwa i różnice pomiędzy napędami z maszynami prądu stałego:
- z klasyczną maszyną DC
- z maszyną BLDC
Zakładając, że elektromechaniczna stała czasowa jest dużo większa od elektromagnetycznej stałej czasowej, która z kolei jest dużo większa od sumy małych stałych czasowych, a opory ruchu związanego z tarciem wiskotycznym są zaniedbywalnie małe b=0 - wyjaśnić reguły stosowania kryterium regulacji modułu.
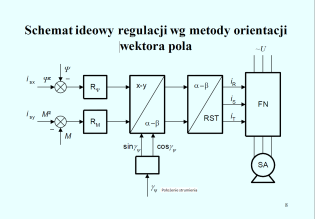
Narysować schemat blokowy sterowania wektorowego i wyjaśnić znaczenie i rolę poszczególnych bloków (dla danej metody). Porównać własności obu metod ze względu na osiągi i złożoność realizacji.
Wymienić najważniejsze założenia upraszczające dla modeli stosowanych w sterowaniu skalarnym/wektorowym. Naszkicować przebieg momentu w funkcji czasu podczas rozruchu.
Wyszukiwarka
Podobne podstrony:
więcej podobnych podstron