POLITECHNIKA ŚLĄSKA
WYDZIAŁ ELEKTRYCZNY
KATEDRA MECHATRONIKI
Instrukcja do ćwiczenia laboratoryjnego
Przedmiot:
Automatyzacja procesów
technologicznych
Symbol
ćwiczenia:
APT6
Tytuł ćwiczenia:
Projektowanie sekwencyjnych układów
pneumatycznych
SPIS TREŚCI
Spis rysunków
2
1.
2.
3.
LABORATORYJNE STANOWISKO BADAWCZE
3.1.
3.2.
3.3.
4.
PROGRAM ĆWICZENIA – WYKAZ ZADAŃ DO REALIZACJI
5.
PRZYKŁAD REALIZACJI ZADANIA – PROGRAMOWANIE
OKREŚLONEJ SEKWENCJI DWUSTANOWEJ
6.
7.
Literatura
8
AUTOMATYZACJA PROCESÓW TECHNOLOGICZNYCH
– instrukcja do ćwiczenia laboratoryjnego
Projektowanie sekwencyjnych układów pneumatycznych
2
SPIS RYSUNKÓW
1.
Czterowejściowa kaskada pneumatyczna [1].
2.
Czterowejściowa kaskada pneumatyczna z zabezpieczeniami [1].
3.
Czterowejściowa jednostka krokowa [1].
4.
5.
6.
Cyklogram układu ze sterowaniami.
7.
Układ sterujący sekwencyjnie siłownikiem trójstanowym zgodnie z zadaną
sekwencją.
8.
Przebieg czasowy pozycji oraz prędkości tłoczyska siłownika.
9.
AUTOMATYZACJA PROCESÓW TECHNOLOGICZNYCH
– instrukcja do ćwiczenia laboratoryjnego
Projektowanie sekwencyjnych układów pneumatycznych
3
1. CELE ĆWICZENIA
Celem ćwiczenia jest zaprojektowanie sekwencyjnego układu pneumatycznego
realizującego określony cykl pracy zgodnie z podanym cyklogramem. Następnie wyznaczenie
przebiegów czasowych sygnałów sterujących lub zasilających istotne elementy (siłowniki,
zawory) oraz przedstawienie cykli pracy w postaci grafu.
2. PODSTAWOWE WIADOMOŚCI
Pneumatyczne elementy wykonawcze współpracują z innymi urządzeniami automatyki
przemysłowej realizując proste czynności wykonywane w sposób sekwencyjny. Są to
najczęściej manipulatory posiadające niewielką liczbę stopni swobody (DoF – Degrres of
Freedom) wykonanych w postaci prostych – dwustanowych siłowników jednostronnie lub
dwustronnie zasilanych. Zadania to podawanie i/lub odbieranie elementów do/z obrabiarek,
przytrzymywanie elementów w trakcie procesów technologicznych takich jak wiercenie lub
stemplowanie.
Podstawowym elementem układu sterowania jest układ sekwencyjny, którego zadaniem
jest wystawianie kolejnych stanów sterujących procesem. Praca może odbywać się w sposób
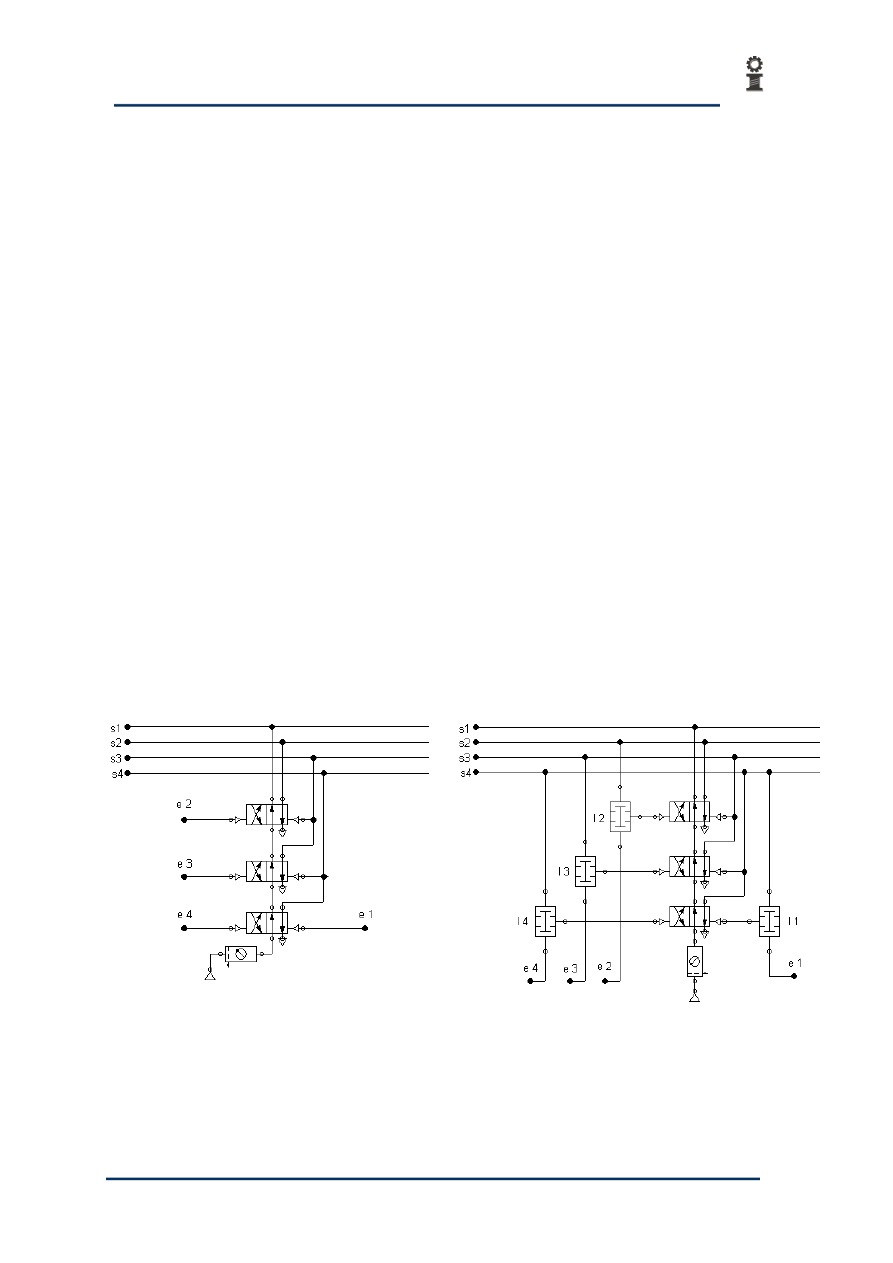
automatyczny lub ciągły. Na rys. 1-4. przedstawiono realizację przykładowych
pneumatycznych układów sekwencyjnych realizujących sekwencję czterocyklową.
Rys. 1. Czterowejściowa kaskada
pneumatyczna [1].
Rys. 2. Czterowejściowa kaskada pneumatyczna
z zabezpieczeniami [1].
AUTOMATYZACJA PROCESÓW TECHNOLOGICZNYCH
– instrukcja do ćwiczenia laboratoryjnego
Projektowanie sekwencyjnych układów pneumatycznych
4
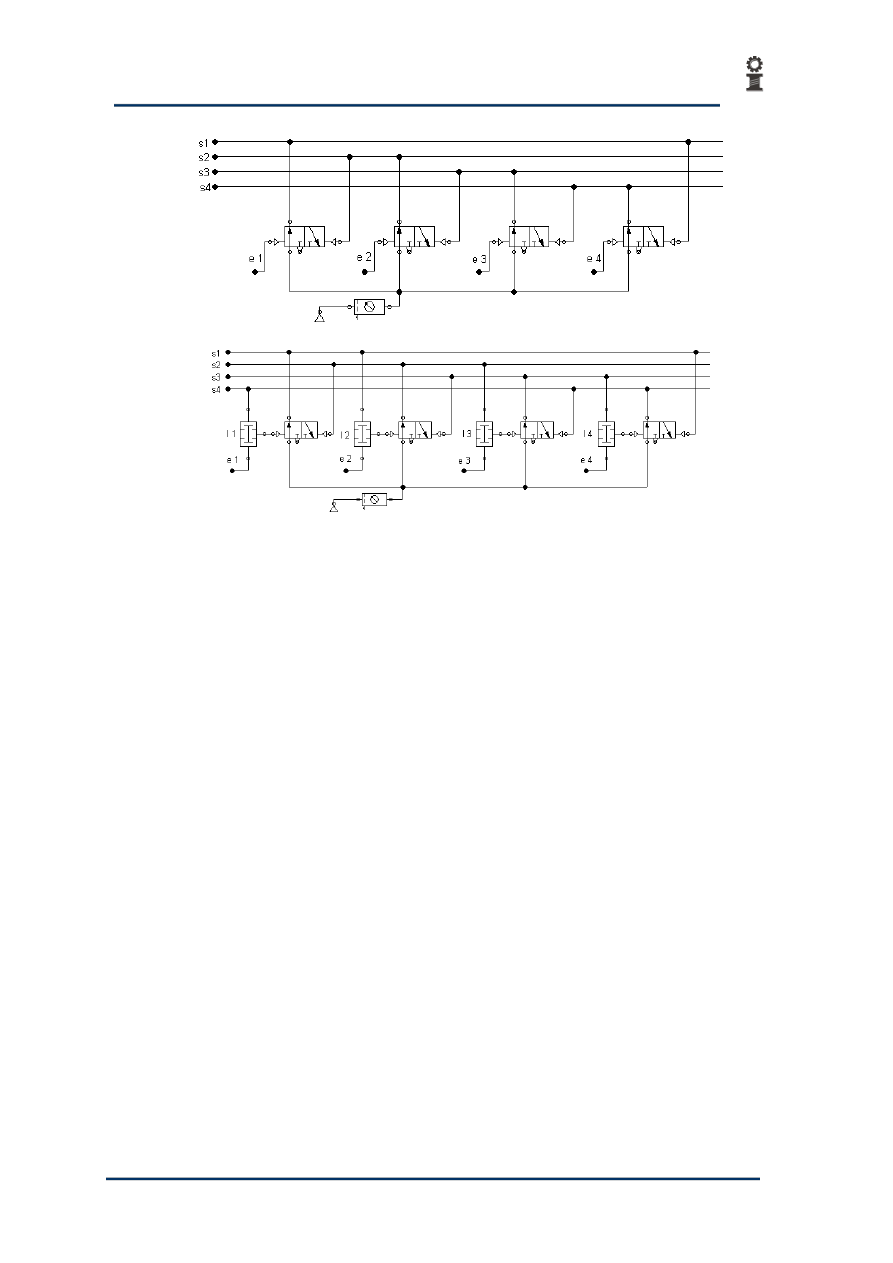
Rys. 3. Czterowejściowa jednostka krokowa [1].
Rys. 4. Czterowejściowa jednostka krokowa z zabezpieczeniami [1].
Przedstawione na rysunkach 1 i 2 kaskady pneumatyczne są to czterodrogowe zawory
rozdzielające połączone szeregowo, dodatkowo na rysunku 2 zabezpieczone koniunkcyjnie.
Na rysunkach 3 i 4 przedstawiono jednostkę krokową (łańcuch taktowo-stopniowy) będący
odmianą
licznika
pierścieniowego.
Zabezpieczenia
zastosowane
w
układach
zaprezentowanych na rys 2 i 4 mają za zadanie umożliwienie sterowania kolejnego kroku (s
i
)
tylko w przypadku, jeżeli układ znajduje się w kroku poprzednim (s
i-1
) oraz zostało
wymuszone sterowanie (e
i
). Zabezpieczenie takie zapewnia wykonanie ściśle określonego
cyklu pracy. Zgubienie kroku spowoduje zatrzymanie całego procesu. Powyższe układy
można łatwo uogólnić na n wejść i wyjść.
Opis działania projektowanego układu można podać na następujące sposoby:
- opis słowny,
- opis z wykorzystaniem określonej symboliki,
- opis za pomocą cyklogramu,
- opis za pomocą grafu.
W układach pneumatycznych przyjęto używać następujące symbole:
+ – wysunięcie tłoczyska siłownika, zadziałanie zaworu, zapalenie się lampki kontrolnej
itp.,
- – wsunięcie tłoczyska siłownika, wyłączenie zaworu, zgaszenie się lampki kontrolnej
itp.
+ - – działania krótkotrwałe (impulsowe) np. naciśnięcie jakiegoś przycisku ręcznego.

AUTOMATYZACJA PROCESÓW TECHNOLOGICZNYCH
– instrukcja do ćwiczenia laboratoryjnego
Projektowanie sekwencyjnych układów pneumatycznych
5
Przykładowy cykl pracy można przedstawić w następujący sposób:
S+-, A+, B+, B-, C+, D+, D-, C- ,A-
Gdzie S to przycisk „Start” A, B, C, D – siłowniki manipulatora.
Graf opisujący działanie układu składa się z wierzchołków grafu, którym przypisuje się
stany wewnętrzne (pozycje siłowników, sygnały z wyłączników krańcowych, sygnały
sterujące z zewnątrz) oraz łuków skierowanych, którymi opisuje się sygnały wejściowe
powodujące przełączanie kolejnych stanów. Sygnały sterujące można zaznaczyć także na
cyklogramie.
Nieanalityczny algorytm projektowania układu sterowania wykonuje się w następujący
sposób [1]:
1) Narysować graf, na podstawie warunków pracy,
2) Podzielić graf na grupy tak, aby w każdej grupie dany element zmieniał stan tylko raz,
stan stabilny (Stop) powinien znajdować się na początku swojej grupy, grupy nie musza
być symetryczne,
3) Dobrać blok pamięci tak, aby liczba stanów była równa liczbie grup z punktu 2).
4) Z wyjść s
1
– s
n
zasilić wyłączniki krańcowe znajdujące się w danej grupie (jeżeli są
wykorzystywane w kilku grupach, to zasilamy je niezależnie i ich wyjścia łączy się
z odpowiednimi wyjściami bloku pamięci przez elementy koniunkcji (AND),
5) Wejścia od bloku pamięci połóczyć z wejściami tych elementów, które odpowiadają
łukom występującym na granicy podziału na grupy, jeżeli łuk jest opisany kilkoma
symbolami, to odpowiadające im wyłączniki należy połączyć szeregowo,
6) Wejścia zaworów rozdzielających, sterujących siłownikami, połączy c z wyjściami tych
elementów (np. wyłączników krańcowych, z których sygnały mają powodować określone
działanie oznaczone na wierzchołku grafu, gdy element powoduje równocześnie zmianę
stanu jednostki taktującej, wtedy bezpośrednio połączyć odpowiednie wejście zaworu
rozdzielającego z odpowiednim wyjściem jednostki taktującej (zgodnie z pkt. 9),
7) Przy równoczesnym działaniu siłowników, ich wejścia łączyć równolegle,
8) Jeżeli różne sygnały mają powodować to samo działanie siłownika, to przed zaworem
rozdzielającym, sterującym danym siłownikiem należy zastosować alternatywę (OR),
9) Przejście do pierwszego stanu w grupie jest powodowane bezpośrednio przez odpowiedni
sygnał wyjściowy s
i
z bloku pamięci,
10) Sygnał powodujący przejście do stanu stabilnego wykorzystuje się do zasilania elementu
wejściowego (przycisk „Start”), powodującego przejście z tego stanu do następnego
AUTOMATYZACJA PROCESÓW TECHNOLOGICZNYCH
– instrukcja do ćwiczenia laboratoryjnego
Projektowanie sekwencyjnych układów pneumatycznych
6
3. LABORATORYJNE STANOWISKO BADAWCZE
3.1. Obiekt badany
Brak
3.2. Urządzenia dodatkowe
Brak
3.3. Oprogramowanie
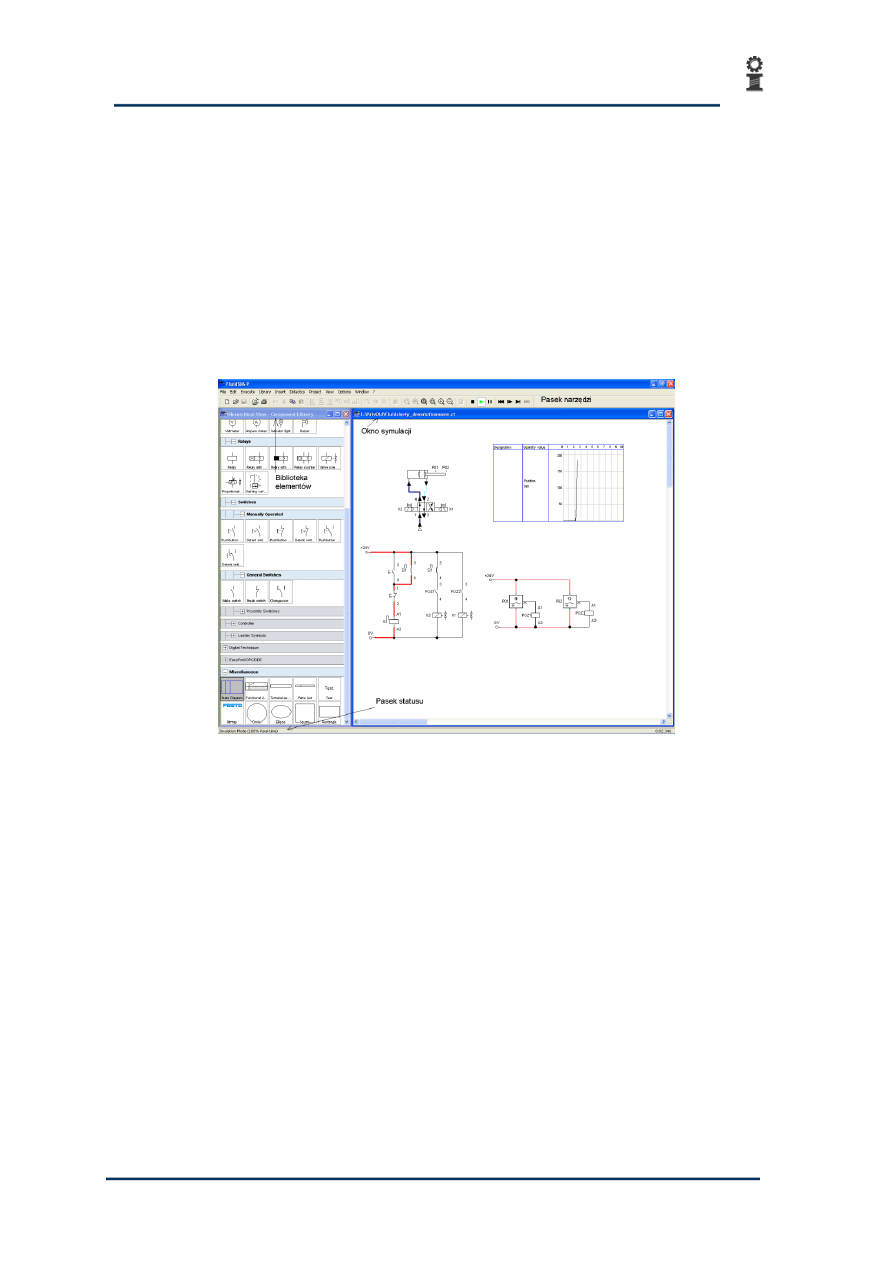
FluidSIM.
Rys. 4. Widok okna programu FluidSIM.
4. PROGRAM ĆWICZENIA – WYKAZ ZADAŃ DO REALIZACJI
Zapoznanie się z pneumatycznymi układami sekwencyjnymi.
Zaprojektować oraz zasymulować układ sekwencyjny złożony z (co najmniej) 4 stanów.
Dla realizowanego układu przedstawić graf układu.
Dla realizowanego układu przedstawić cyklogram pracy z naniesionymi sygnałami
sterowania.
Przedstawić „rzeczywiste” przebiegi czasowe najistotniejszych elementów układu
zarejestrowane za pomocą diagramu stanów (State Diagram) w programie FluidSim.
5. PRZYKŁAD REALIZACJI ZADANIA – PROGRAMOWANIE OKREŚLONEJ
SEKWENCJI DWUSTANOWEJ
Zadanie:
AUTOMATYZACJA PROCESÓW TECHNOLOGICZNYCH
– instrukcja do ćwiczenia laboratoryjnego
Projektowanie sekwencyjnych układów pneumatycznych
7
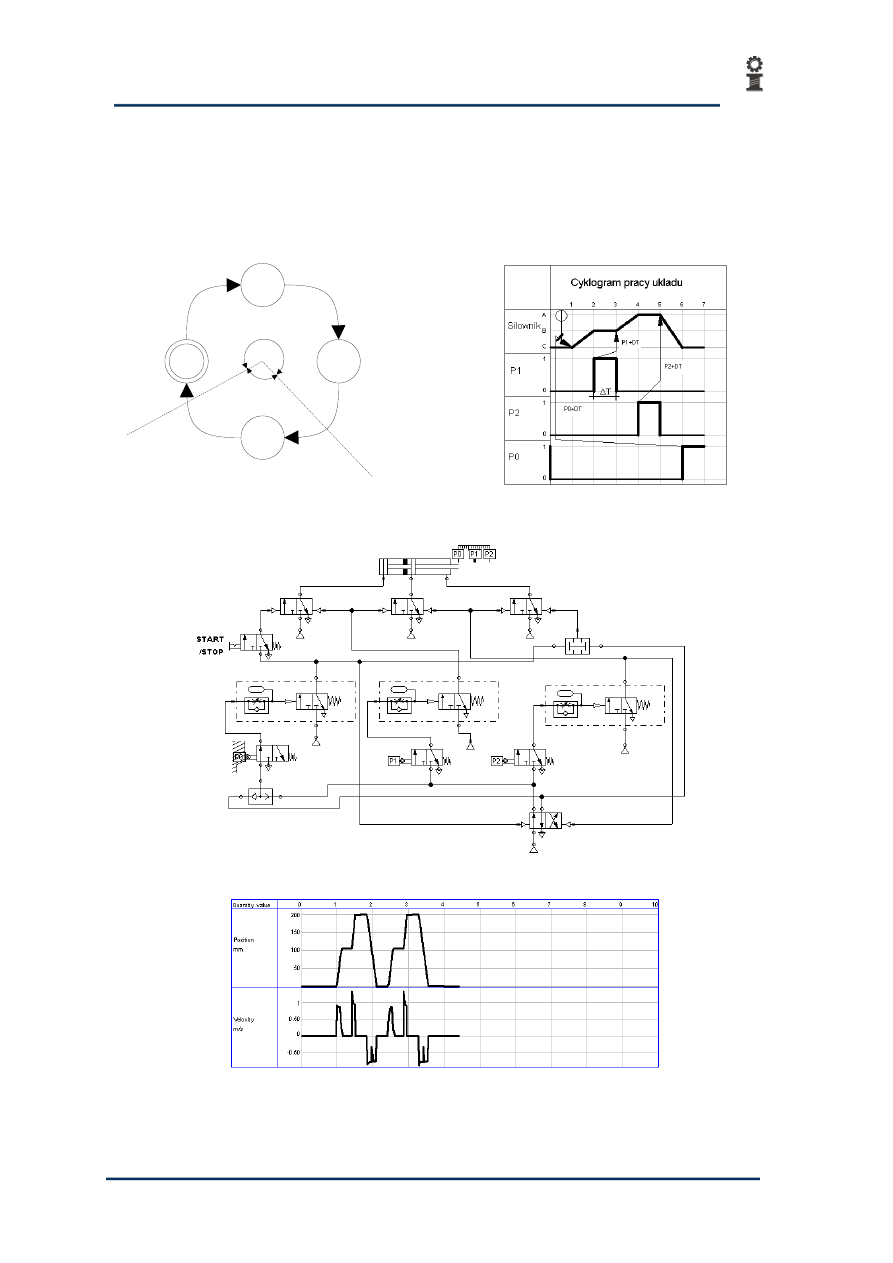
Zadanie polega na ustaleniu sekwencji przełączania siłownika trójstanowego zgodnie
z sekwencją S+-, A+, B+, A- B-, opóźnienie (
T) między kolejnymi stanami podawane jest
za pomocą pneumatycznych układów opóźniających dla każdej krańcówki osobno.
Graf sterowania:
S
A+
B+
A-B-
S+
P1+
T
P2+
T
P0+
T
S1
S2
Rys. 5. Graf sekwencji przełączania.
Rys. 6. Cyklogram układu ze sterowaniami.
Realizacja zadania:
Rys. 7. Układ sterujący sekwencyjnie siłownikiem trójstanowym zgodnie z zadaną
sekwencją.
Rys. 8. Przebieg czasowy pozycji oraz prędkości tłoczyska siłownika.
AUTOMATYZACJA PROCESÓW TECHNOLOGICZNYCH
– instrukcja do ćwiczenia laboratoryjnego
Projektowanie sekwencyjnych układów pneumatycznych
8
6. RAPORT
Raport z przeprowadzonego ćwiczenia laboratoryjnego powinien zawierać:
Krótki opis zagadnienia.
Realizację układową postawionego zadania.
Graf, cyklogram oraz przebieg czasowy zmian parametrów (pozycja, prędkość, stan)
najważniejszych elementów układu.
Podsumowanie i wnioski.
7. PYTANIA
1. Omów działanie siłowników jednostronnego i dwustronnego działania.
2. Wyjaśnij zasadę pracy układu logicznego AND i OR na podstawie symbolu.
3. Scharakteryzuj metody projektowania pneumatycznych układów przełączalnych (zalety
i wady): metoda intuicyjna, metoda algorytmiczna (nieanalityczna), metoda analityczna.
Która metoda została opisana w ćwiczeniu?
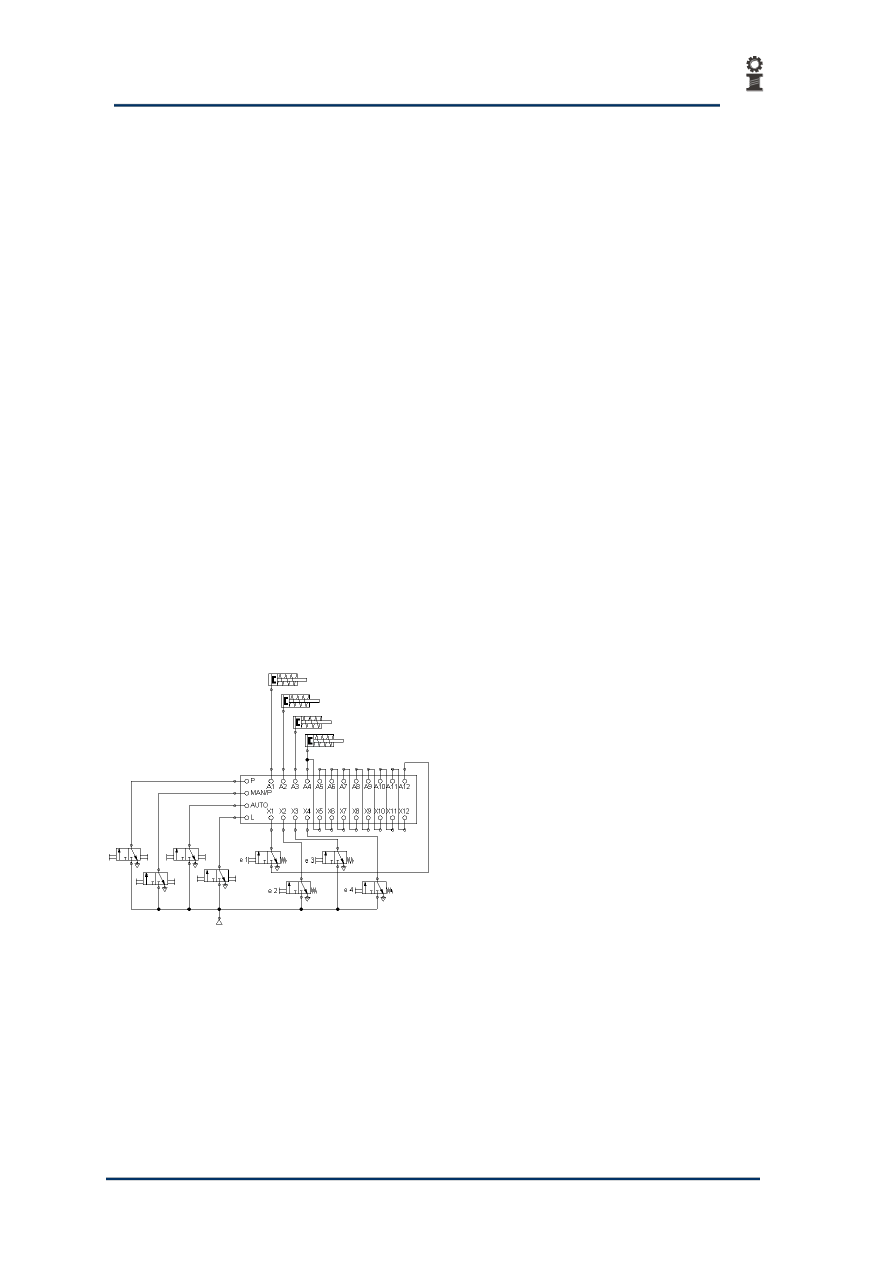
4. Zadanie dodatkowe: zrealizuj zadany układ wykonawczy z wykorzystaniem bloku
przełączalnego Quickstepper (Pneumatic -> Valve Groups).
Przykład użycia bloku przedstawia Rys. 9.
Rys. 9. Przełącznik sekwencyjny Quickstepper.
LITERATURA
1. Szenajch W.: Napęd i sterowanie pneumatyczne. Podręczniki akademickie mechanika.
Wyd. 3 zmienione, Wydawnictwa Naukowo-Techniczne, Warszawa 1992, 1997.
Opracowanie: Marek Kciuk
Wyszukiwarka
Podobne podstrony:
APT LAB instr 5
APT LAB instr 4 id 67339 Nieznany (2)
APT LAB instr 6
APT LAB instr 1
APT LAB instr 3 id 67338 Nieznany
APT LAB instr 2
APT LAB instr 5
APT LAB instr 3
APT LAB Wykaz ćwiczeń2013
APT LAB Harmonogram zajęć laboratoryjnych2013
Wyka z ćwicz. BHP i reg.2012, I,II, I, MET, geometryczna, LAB, INSTR
Mechatronika ćw 5, I,II, I, MET, geometryczna, LAB, INSTR
Mechatronika ćw 8, I,II, I, MET, geometryczna, LAB, INSTR
BoeBot Lab Instr
druk, I,II, I, MET, geometryczna, LAB, INSTR
Mechatronika ćw 1, I,II, I, MET, geometryczna, LAB, INSTR
APT LAB Wykaz ćwiczeń2013
Mechatronika ćw 6, I,II, I, MET, geometryczna, LAB, INSTR
więcej podobnych podstron