Bogna Czyżewska
192752
Sprawozdanie
z zajęć laboratoryjnych do kursu Podstawy automatyki i robotyki
z dnia 05.03.12r, sala 010.
ROBOT PRZEMYSŁOWY IRB 1400
Roboty przemysłowe można podzielić tradycyjnie, pod kątem wykonywanych zadań, na spawal-
nicze, malarskie, montażowe, laboratoryjne, służące do przenoszenia materiałów i załadunku palet,
stosowane do obróbki materiałów lub do utylizacji i zabezpieczania odpadów. W chwili obecnej
ciężko uznawać taki podział za ostateczny i jednoznaczny. Pierwszą przeszkodą ku temu jest szybki
rozwój robotyki, zwiększający dostępne zastosowania dla tego typu konstrukcji; drugą przeszkodą
jest istnienie coraz większej liczby robotów przemysłowych wielozadaniowych, które dzięki
wymiennym efektorom mogą służyć do różnych celów. Przykładem takiego robota jest omawiany
IRB 1400, który może służyć nie tylko do chwytania i transportu obiektów, ale również, po zamon-
towaniu odpowiednich usprawnień, na przykład do spawania.
Robot przemysłowy IRB 1400 jest produko-
wany przez firmę ABB Robotics Products AB
od 1992 roku. Wykonano co najmniej 14 tys.
egzemplarzy tej konstrukcji
. Obecnie linię tą
kontynuuje robot IRB 1410.
IRB 1400 ma 3 tryby pracy: ręczny (czło-
wiek steruje ruchami manipulatora za pomocą
poręcznego panelu operatora; ze względów
bezpieczeństwa prędkość w tym trybie jest
znacznie ograniczona), ręczny 100% (jak
wyżej, ale bez ograniczenia prędkości – ten
tryb jest dość rzadko stosowany) oraz automa-
tyczny (robot odtwarza zaprogramowane
ruchy). Współrzędne narzędzia (tool center
point – TCP) podaje we współrzędnych
zewnętrznych z dokładnością do dziesiętnych
milimetra
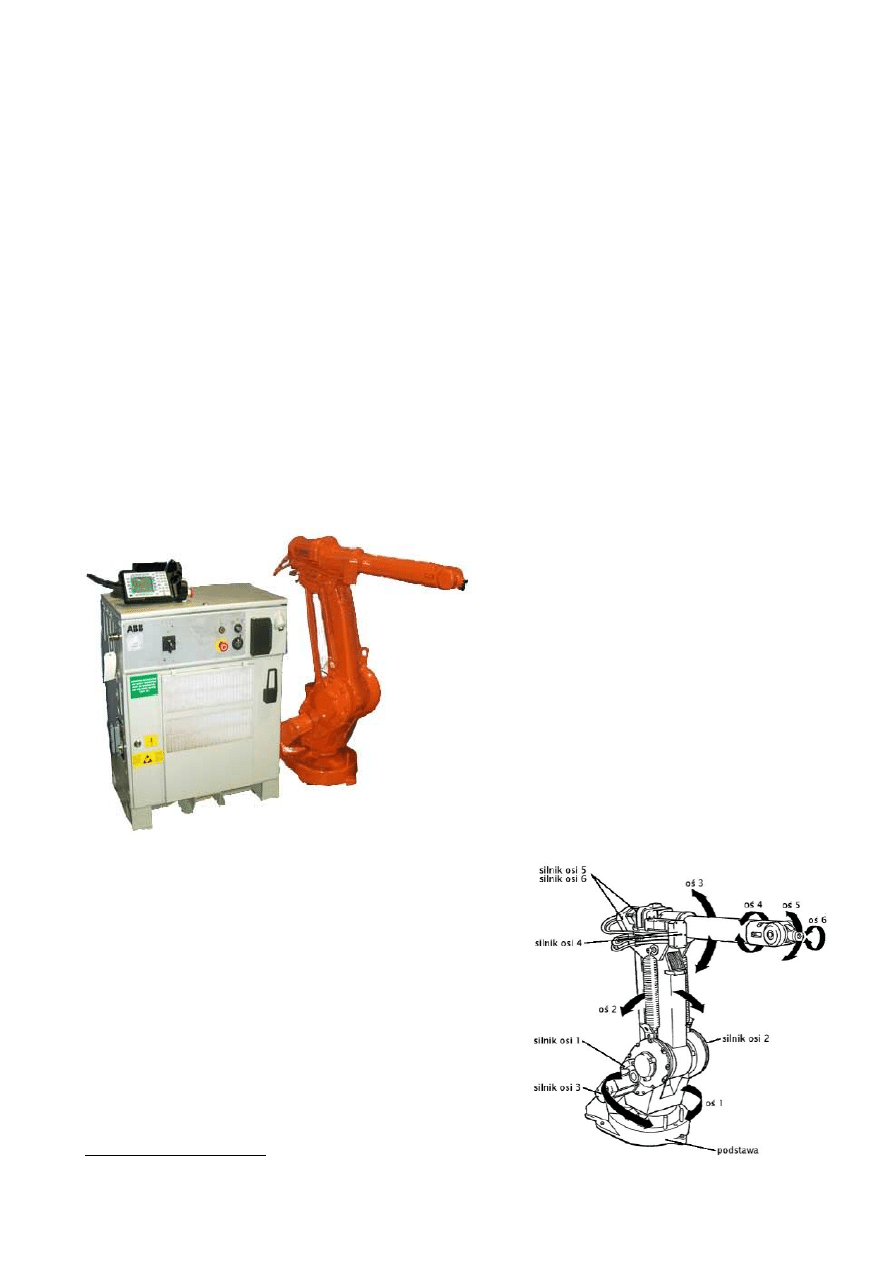
Budowa IRB 1400
Podstawowe elementy robota przemysłowego IRB 1400
to manipulator i system sterowania (szafa sterownicza).
Model znajdujący się w laboratorium 010 został dodatkowo
wyposażony w dwuosiowy pozycjoner automatyczny. Ruch
jest prądem zmiennym. Silniki robota wyposażone są
w hamulce elektromagnetyczne, pozwalające błyskawicznie
przerwać ruch nawet przy dużej prędkości.
Robot wyposażony jest w 4 złącza obsługujące sensory
zewnętrzne (interfejsy komunikacyjne RS232, RS422, 2x
CAN).Dzięki wyposażeniu konstrukcji w wejścia i wyjścia
1 Dane za: http://www.abb.com/product/seitp327/f6ea1b8333ed7e37c125755800034874.aspx
analogowe i dwustanowe oraz dodatkowe układy wykonawcze możliwe jest podłączenie silników
zewnętrznych.
Manipulator
Manipulator robota jest stacjonarny. Ma 6 stopni swobody, wszystkie przeguby są 5 stopnia. Na
końcówkę manipulatora można zakładać wymienne efektory, których dobór zależy od wykonywa-
nego zadania. Istnieje możliwość rozszerzenia konstrukcji o element umożliwiający automatyczną
wymianę końcówek w trakcie pracy robota.
Udźwig manipulatora wynosi 5kg (jest to łączna masa chwytaka i przenoszonego ładunku). Do
ramienia można jednak przymocować dodatkowe 18 kg oprzyrządowania dodatkowego (podajnik
drutu spawarki, wyspy zaworowe pneumatycznego oprzyrządo-
wania).
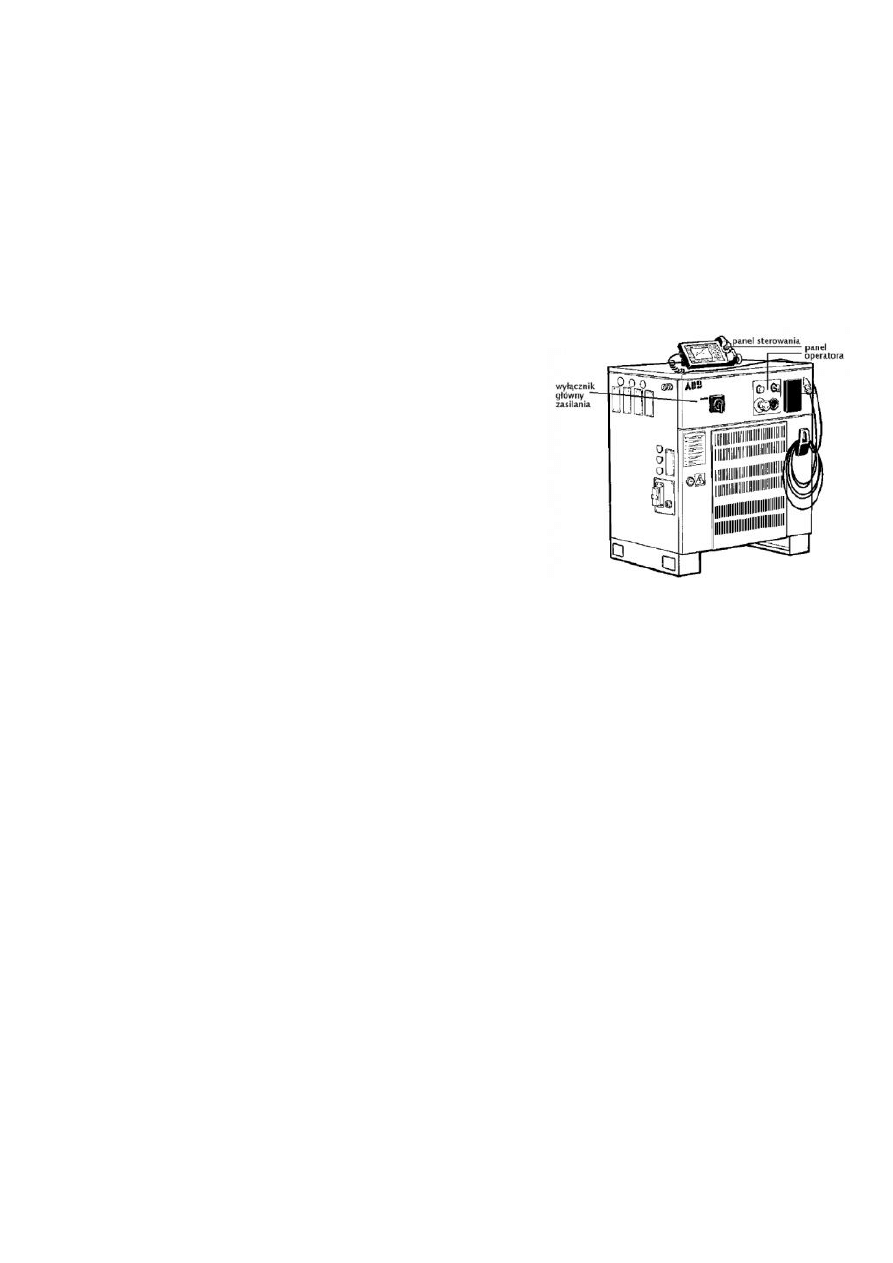
Szafa sterownicza
Szafa sterownicza IRB 1400 składa się z jednostki centralnej
oraz dwóch dodatkowych komputerów, których zadaniem jest
obsługa układów sterowania silników oraz sprzęgów komuni-
kacyjnych. Na panelu operatora znajduje się przełącznik trybu
pracy (tryby te są opisane powyżej) i czerwony przycisk wyłą-
czenia awaryjnego, natychmiastowo odcinający zasilanie.
Drugi taki przycisk znajduje się na panelu sterowania.
Programowanie
Zgodnie z definicją ISO manipulacyjny robot przemysłowy musi być programowalny, to znaczy
musi mieć możliwość jak najdokładniejszego odtwarzania zadanej (zaprogramowanej) sekwencji
ruchów.
Każdy producent robotów zleca stworzenie własnego języka programowania, zaprojektowanego
odpowiednio do profilu zadań wykonywanych przez ich konstrukcje. Dla ABB jest to Rapid, dla
firmy Fanuc – Karel, itd. Każdy z tych języków jest wysokiego poziomu i składa się głównie ze
specyficznych instrukcji, np. instrukcji ruchu. Ponadto każdy taki język musi mieć wbudowaną
obsługę wejść i wyjść, czasem nawet dla kilkudziesięciu urządzeń zewnętrznych.
W sterowaniu IRB 1400 można wykorzystywać zarówno współrzędne zewnętrzne (liniowe), jak
i wewnętrzne (kątowe).
Język programowania
W języku Rapid, właściwym dla IRB 1400, można wyodrębnić osiem podstawowych komend:
For - powtarzanie ciągu instrukcji zadaną ilość razy;
If - wyrażenie warunkowe;
MoveC - przesunięcie efektora po łuku;
MoveJ - przesunięcie efektora we współrzędnych przegubowych;
MoveL - przesunięcie efektora liniowo;
Reset - ustawienie wyjścia cyfrowego na zero;
Set - ustawienie wyjścia cyfrowego na jeden;
While - powtarzanie ciągu instrukcji.
Język Rapid pozwala na wprowadzanie komentarzy do kodu.
Metody programowania
IRB 1400 może być programowany w trybie online (przez uczenie – z wykorzystaniem joysticka
znajdującego się na panelu operatora) lub offline. Programy stworzone na zewnętrznym komputerze
można wgrać z dysku 3.5”/1.44 MB.

Parametry techniczne
➢
model: IRB 1400
➢
producent: ABB Robotics Products AB
➢
wymiary: 1025mm x 680mm x 440mm
➢
waga: 250kg
➢
udźwig: 5kg (rozszerzalny do 18 kg)
➢
maksymalny zasięg manipulatora: 1440mm
➢
precyzja: ±0,05mm
➢
ruchliwość: 6 stopni swobody
➢
prędkość pracy manipulatora: 250 m/s
➢
oprogramowanie: BaseWare OS
➢
typ mocowania: podłogowe
CHWYTAKI
Chwytaki to jeden z rodzajów efektorów – końcówek montowanych na końcu ramienia manipula-
tora. Efektory mogą być mocowane na stałe lub wymienne (jak w IRB 1400). Są to elementy słu-
żące do bezpośredniej realizacji zadania, np. cięcia, spawania, przenoszenia itp.
Chwytak to w robotyce oprzyrządowanie manipulatorów, robotów, dające możliwość chwycenia
i transportu przedmiotów w zautomatyzowanych czynnościach precyzyjnych. Chwytaki składają się
z zespołu napędowego, przeniesienia napędu i końcówek chwytnych. Kształt i parametry poszcze-
gólnych zespołów zależą od materiału, kształtu detalu, środowiska pracy oraz zastosowania. Chwy-
tak może być wyposażony w narzędzie (np. lutownica, spawarka), umożliwiające realizację okre-
ślonych czynności.
Standardowo wykonane chwytaki mogą być wyposażone dodatkowo w różnego rodzaju elementy,
zespoły lub mechanizmy, które umożliwiają zmianę lub poprawę warunków chwytania obiektu
manipulacji albo pozwalają na równoległe do operacji manipulowania wykonywanie pewnych
czynności technologicznych. Typowym wyposażeniem chwytaków są: wymienne nakładki na koń-
cówki chwytne, czujniki oraz pomocnicze urządzenia i narzędzia technologiczne.
Typy chwytaków i ich zastosowania
Ze względu na realizowany sposób chwytania wyróżnia się chwytaki:
–
siłowe (podczas chwytania działają na obiekt manipulacji siłami w stronę powierzchni
obiektu albo przeciwnie, od obiektu w kierunku chwytania),
–
kształtowe.
W przypadku chwytaków siłowych siły oddziałujące na obiekt manipulacji mogą być typu:
–
naprężającego (ściskającego, rozciągającego),
–
przyciągającego.
Ze względu na zasadnicze różnice w budowie wyróżniono chwytaki:
–
ze sztywnymi końcówkami chwytnymi,
–
ze sprężystymi końcówkami chwytnymi,
–
z elastycznymi końcówkami chwytnymi (zmieniają swój kształt pod wpływem dostarczonej
energii - zwykle sprężonego powietrza),
–
adhezyjne (podciśnieniowe, magnetyczne),
–
specjalne urządzenia chwytające.

W zależności od sposobu przemieszczania się końcówek chwytnych pod wpływem siły
wytworzonej przez mechanizm napędowy wyróżnia się ruch końcówek:
–
nożycowy,
–
szczypcowy,
–
imadłowy.
BIBLIOGRAFIA
ABB Robotics Products AB, User's guide, [online:] http://rab.ict.pwr.wroc.pl/irb1400/guide_31.pdf
Obsługa i programowanie robota IRB1400 [online:]
http://rab.ict.pwr.wroc.pl/lab_010/index.html
Ludwików, Paweł, Programowanie robota IRB-1400, 2005 [online:]
http://rab.ict.pwr.wroc.pl/dydaktyka/instrukcje/irb1400-komendy.pdf
Wyszukiwarka
Podobne podstrony:
AiR spr wprowadzenie do matlab, MathLab, Matlab
spr ost, Studia, Rok II, Zarys budownictwa
spr 5 prostowod, Politechnika krakowska AiR - robep22@gmail.com, Semestr 3
spr 100b, Automatyka i robotyka air pwr, III SEMESTR, FIZYKA 2, sprawko 100
spawalnictwo napawanie ost spr (1)
sygnały spr okna, pwr, air, semestr 3, Teoria sygnałów
Spr APMA A5 podajnik, AiR, 6 semestr AIR, APMA, sprawka
spr 4 krzywka, Politechnika krakowska AiR - robep22@gmail.com, Semestr 3
spawalnictwo napawanie ost. spr., Spawalnictwo
spawalnictwo napawanie ost. spr, Politechnika Lubelska, Studia, Studia, organizacja produkcji, labor
spr lab2 PA, AGH WIMIR AiR, Semestr 5, Sterowanie dyskretne, projekt SD NAW, z zajec, sprawko lab2 P
mury projekt spr nośności filara śc zew ost kond
spr AiR 006 Andrzej Wołczowski
spr AiR Ewa Szlachcic
Depresja ost
Spr[1] adm i uznanie adm
więcej podobnych podstron