Jacek Stefański
Katedra Systemów i Sieci Radiokomunikacyjnych, Politechnika Gdańska
Efektywność estymacji położenia terminala ruchomego w sieciach komórkowych III generacji
Streszczenie
W referacie przedstawiono problem wyznaczania położenia terminala ruchomego w sieciach komórkowych, ze szczególnym uwzględnieniem europejskiego programu E112, dotyczącego m.in. wymogów stawianych europejskim operatorom sieci komórkowych w przypadku realizacji usług alarmowych związanych z wywołaniami pod specjalnym numerem 112. Opisano zalecane metody lokalizowania terminala ruchomego w sieciach komórkowych III generacji. Przedstawiono także zastosowany model symulacyjny do badania efektywności estymacji położenia terminala ruchomego w środowisku wielkomiejskim oraz otrzymane rezultaty.
1. WPROWADZENIE
Cechą charakterystyczną systemów komórkowych jest możliwość swobodnego przemieszczania się użytkowników na obszarze działania danej sieci. W odróżnieniu od systemów telefonii stacjonarnej, w których numer danego abonenta odpowiada jego adresowi fizycznemu (np. gniazdko telefoniczne), w sieci komórkowej numer abonenta stanowi jego adres logiczny, który należy skojarzyć z adresem fizycznym, zmieniającym się w funkcji przemieszczania się terminala ruchomego. W tak zorganizowanej sieci istnieje potrzeba precyzyjnego i szybkiego określania położenia danego abonenta na przykład w sytuacji, gdy zagrożone jest jego bezpieczeństwo. Sytuacja taka może mieć miejsce, gdy dany użytkownik informuje, za pomocą terminala (telefonu) komórkowego, odpowiednie służby ratownicze (straż pożarną, pogotowie ratunkowe, policję, itp.), o zagrożeniu znajdującym się w jego bezpośrednim otoczeniu. Możliwość szybkiego i precyzyjnego określenia pozycji danego użytkownika pozwala na bardziej efektywne i skuteczne działanie służb ratowniczych. Wiąże się to więc z potrzebą stworzenia systemu precyzyjnej lokalizacji abonentów sieci komórkowych w ścisłej współpracy operatorów tych sieci i służb ratowniczych. Procedury obsługi połączeń alarmowych opracowywane są w ramach uzgodnień krajowych (program E911 w USA [1]) i międzynarodowych (program E112 w Unii Europejskiej [2]).
2. Europejski program E112
Europejski program E112 (Enhanced 112) definiuje uniwersalny numer ratunkowy 112, który obowiązuje we wszystkich krajach członkowskich Unii Europejskiej. Został on ustanowiony decyzją Rady Europejskiej z 29 lipca 1991 roku, a następnie zatwierdzony wraz z odpowiednim ustawodawstwem przez Parlament Europejski 26 lutego 1998 roku (Dyrektywa 98/10/EC dotycząca tzw. telefonii głosowej i uniwersalnych usług telekomuni-kacyjnych w warunkach konkurencyjności między operatorami). Dyrektywa ta zakłada m.in. konieczność dodatkowego dostarczania służbom ratowniczym informacji o lokali-zacji (dla telefonii komórkowej o położeniu geograficznym) osoby dzwoniącej. Procedury obsługi połączeń alarmowych różnią się w poszczególnych krajach członkowskich. Komisja Europejska odpowiednim ustawodawstwem stara się zdefiniować ogólne wyma-gania, jakie ma spełniać program E112 we wszystkich krajach Unii. W tym celu powołane zostały odpowiednie organizacje, które zajmują się promocją programu E112 oraz koordynacją działań operatorów i służb ratowniczych w poszczególnych krajach. Zagadnieniami dotyczącymi lokalizowania abonentów w sieciach komórkowych zajmuje się grupa CGALIES (Co-ordination on Access to Location Information by Emergency Services). Grupa ta zdefiniowała dwie fazy wprowadzania programu E112 w Unii Euro-pejskiej. Pierwsza faza (zrealizowana do 2003 roku), przewiduje przybliżoną lokalizację abonentów na podstawie znajomości komórki/sektora, w której znajduje się osoba realizu-jąca położenie. Druga faza wprowadzania programu E112 zakłada możliwość uzyskania przez operatora sieci komórkowej dokładnych współrzędnych danego abonenta i przesłanie tych danych specjalnym interfejsem do centrali służb ratunkowych. Przewiduje się, że faza ta będzie zrealizowana w sieciach komórkowych do roku 2007 [2].
3. MEtody lokalizowania terminala ruchomego w sieciach komórkowych
W sieciach komórkowych, ze względu na miejsce wykonywania pomiarów i obliczeń, wyróżniamy trzy podstawowe sposoby realizacji usługi lokalizowania terminala rucho-mego:
w której pomiary i obliczenia są wykonywane przez infrastrukturę sieci komórkowej (network-based solution),
w której pomiary i obliczenia są wykonywane przez terminal ruchomy (handset-based solution),
w której pomiary i obliczenia niezbędne do estymacji położenia terminala ruchomego są wykonywane zarówno w samym terminalu jak i przez infrastrukturę sieci komórkowej (hybrid solution).
Dokładność określania pozycji terminala ruchomego zależy przede wszystkim od użytej metody, którą wybiera operator sieci. Dokonuje tego na podstawie konfiguracji sieci na danym obszarze działania, biorąc pod uwagę m.in. rozmiary komórek, bezpośrednią widoczność stacji bazowych LOS (Line Of Sight) lub jej brak NLOS (Non Line Of Sight) oraz rodzaj zastosowanych anten (anteny dookólne, sektorowe lub w przyszłości adaptacyjne).
Dokumentacja techniczna systemu UMTS specyfikuje trzy podstawowe metody lokalizowania stacji ruchomej [3]:
na podstawie identyfikacji numeru komórki lub sektora, w którym znajduje się terminal ruchomy - Cell ID, metoda ta wspomagana jest często pomiarem tzw. czasu RTT (Round Trip Time), będącego różnicą opóźnień propagacyjnych w łączu w górę i w dół pomiędzy terminalem ruchomym a stacją bazową - metoda zwana Cell ID + RTT;
na podstawie pomiarów tzw. czasów TDOA (Time Difference Of Arrival) pomiędzy terminalem ruchomym a pobliskimi, przynajmniej trzema stacjami bazowymi, obsługi-wanymi przez jeden lub kilka koncentratorów ruchu NodeB - metoda zwana TDOA;
na podstawie danych pochodzących z modułu do odbioru sygnałów GPS (Global Positioning System) zintegrowanego z terminalem ruchomym - metoda określano jako A-GPS (Assisted GPS).
Pierwsza metoda lokalizowania terminala ruchomego, jest prosta i tania w imple-mentacji. Jednak jej praktyczna przydatność jest ograniczona, ze względu na małą dokładność określania położenia stacji ruchomej.
Największe znaczenie praktyczne w lokalizowaniu terminala ruchomego w sieciach komórkowych ma metoda oparta na pomiarze czasów TDOA. Koszt implementacji tej metody jest związany przede wszystkim z opracowaniem odpowiedniego oprogramowania w oparciu o istniejącą infrastrukturę sieci komórkowej. Metoda ta, w zależności od rodzaju środowiska propagacyjnego i rozmiarów komórki, umożliwia lokalizowanie terminala ruchomego z dokładnością od kilku do kilkudziesięciu, a w niektórych przypadkach do kilkuset metrów [4]. W sieciach komórkowych III generacji implementacja metody TDOA jest utrudniona, ze względu na brak synchronizacji stacji bazowych w trybie FDD (Frequency Division Duplex). Rozwiązaniem tego problemu jest określenie parametru RTD (Relative Time Difference), mierzonego w systemie numeracji ramek SFN (System Frame Numbers) przesyłanych w sieci [5]. Parametr RTD identyfikuje różnice czasowe w syn-chronizacji pomiędzy poszczególnymi stacjami bazowymi. Za pomiar parametrów RTD w systemie UMTS jest odpowiedzialny tzw. moduł LMU (Location Measurement Unit). Dane te co pewien czas wymagają uaktualniania, m.in. ze względu na zmienność parametrów układów elektronicznych w dziedzinie czasu.
Określanie pozycji terminala ruchomego na podstawie informacji pochodzących z modułu GPS jest najdokładniejsze, jednak czasami musi być wspomagane pomiarami parametrów łączy radiowych pomiędzy terminalem ruchomym a koncentratorem ruchu NodeB, gdyż brak widzialności dostatecznej liczby satelitów, np. na terenach silnie zurba-nizowanych lub wewnątrz budynków utrudnia otrzymanie zadowalających rezultatów. Metoda ta jest stosunkowo droga, gdyż każdy terminal ruchomy musi być wyposażony w odbiornik sygnałów GPS. W związku z tym jej przydatność podczas określania położe-nia terminala ruchomego jest ograniczona.
4. Estymacja położenia terminala ruchomego w systemie umts
4.1. Metoda Cell ID + RTT
Parametr Cell ID jest numerem identyfikacyjnym przypisywanym przez operatora poszczególnym komórkom w sieci. Informacja o Cell ID jest używana przez sieć do identyfikacji punktu połączenia terminala ruchomego z siecią. Operator zna współrzędne geograficzne obszaru każdej komórki w sieci, dzięki czemu może on podać służbom ratunkowym przybliżone informacje o lokalizacji danego abonenta. Dokładność estymacji położenia terminala ruchomego w tej metodzie zależy od rodzaju terenu w jakim się znajduje. W przypadku terenów wiejskich (rural area) rozmiar komórek wynosi od kilku do kilkunastu kilometrów, w terenie podmiejskim (suburban) jest to kilka kilometrów, w terenie miejskim (urban area) promień komórek wynosi kilkaset metrów, a wewnątrz budynków (indoor) instaluje się piko komórki o promieniu kilkudziesięciu metrów. W przypadku, gdy dana komórka jest podzielona na sektory, możliwe jest dokładniejsze wyznaczenie pozycji terminala ruchomego.
Dodatkową możliwość zwiększenia dokładności lokalizowania terminala ruchomego zapewnia znajomość parametru RTT. Na rys. 1 przedstawiono graficznie cztery różne warianty implementacji metody Cell ID w sieciach komórkowych. W przypadku wariantu z rys. 1d) dla zwiększenia dokładności lokalizowania terminala ruchomego stosuje się informacje dodatkowe, np. pochodzące z projektu sieci komórkowej, uwzględniającego urbanizację terenu oraz rozmieszczenie ciągów komunikacyjnych na danym obszarze.
a) b) c) d)
Rys.1. Ilustracja graficzna różnych wariantów implementacji metody Cell ID w sieciach
komórkowych ze względu na dokładność lokalizowania terminala ruchomego:
a) na obszarze komórki, b) na obszarze sektora, c) wspomagana pomiarem RTT,
d) wspomagana pomiarem RTT oraz wykorzystująca dodatkowe informacje,
pochodzące od projektantów sieci.
4.2. Metoda TDOA
Metoda TDOA lokalizowania stacji ruchomej w sieciach komórkowych, sprowadza się do wyznaczenia różnicy odległości pomiędzy terminalem ruchomym a sąsiednimi stacjami bazowymi i rozwiązania nieliniowego układu równań hiperbolicznych o postaci [6, 7]

(1)
gdzie Rij oznacza odległość pomiędzy sąsiednimi stacjami bazowymi, c jest prędkością rozchodzenia się fali elektromagnetycznej w środowisku propagacyjnym (w próżni c = 3×108 m/s), ij oznacza różnicę opóźnień propagacyjnych pomiędzy terminalem ruchomym a i-tą i j-tą stacją bazową, Ri reprezentuje odległość pomiędzy i-tą stacją bazową a terminalem ruchomym, M jest liczbą stacji bazowych biorących udział w estymacji położenia terminala ruchomego (Mmin = 3), natomiast (x, y) i (xi, yi) określają współrzędne odpowiednio stacji ruchomej i i-tej stacji bazowej na płaszczyźnie.
Dokładność tej metody jest zależna przede wszystkim od precyzji dokonywanych pomiarów czasowych oraz geometrycznego rozmieszczenia stacji bazowych wokół terminala (najlepsze rezultaty osiągane są w warunkach, kiedy stacje bazowe równomiernie otaczają terminal). Metoda TDOA może być w całości realizowana w terminalu lub tylko przy jego częściowym udziale. Podstawowa różnica wynika przede wszystkim z miejsca dokonywania obliczeń. W pierwszym przypadku terminal mierzy tylko różnice w czasie docierania sygnałów ze stacji bazowych. Dalsze obliczenia są wykonywane w sieci. Drugie rozwiązanie charakteryzuje się tym, że terminal ruchomy dokonuje zarówno pomiarów opóźnień propagacyjnych sygnałów odbieranych ze stacji bazowych, jak również ich analizy.
Przedstawiona powyżej metoda lokalizowania terminala ruchomego pociąga za sobą konieczność zapewnienia bezpośredniej widoczności pomiędzy terminalem a stacjami bazowymi, biorącymi udział w obliczeniach. Brak bezpośredniej widoczności znacznie zmniejsza dokładność metody. Również zjawisko wielodrogowości, występujące nawet w przypadku spełnienia powyższego warunku, wpływa niekorzystnie na dokładność otrzymy-wanych wyników.
4.2.1. Zmodyfikowania metoda TDOA
Klasyczna metoda TDOA wyznaczania położenia terminala ruchomego sprowadza się do rozwiązania układu równań (1). Jest to oczywiście możliwe przy założeniu synchro-nicznej pracy wszystkich stacji bazowych, biorących udział w procesie lokalizowania terminala ruchomego lub znajomości różnic czasowych w ich synchronizacji. Zatem, dla przypadku dwuwymiarowego (Mmin = 3) dla dyskretnej chwili czasu n układ równań (1) możemy zapisać w postaci:

(2)
gdzie t1(n), t2(n) i t3(n) oznaczają pomierzone czasy propagacji sygnałów od poszcze-gólnych stacji bazowych do stacji ruchomej o współrzędnych (x(n), y(n)) w chwili czasu n, natomiast RTD2 i RTD3 reprezentują różnice czasowe w synchronizacji odpowiednio pierwszej stacji bazowej względem drugiej oraz pierwszej stacji bazowej względem trzeciej. Pozostałe oznaczenia są takie same jak w zależności (1). Zakładając, że nie znamy różnic czasowych w synchronizacji poszczególnych stacji bazowych powyższy układ równań zawiera cztery niewiadome i posiada wiele rozwiązań w zadanym obszarze poszukiwań. W dyskretnej chwili czasu n+1, związanej ze zmianą położenia terminala ruchomego w porównaniu z pozycją poprzednią, możemy utworzyć analogiczny do (2) kolejny układ równań postaci:
(3)
gdzie (x(n+1), y(n+1)) reprezentuje współrzędne terminala ruchomego w chwili czasu n+1.
Zakładając, że różnica pomiędzy kolejnymi dyskretnymi chwilami czasu n i n+1 jest na tyle mała, że można przyjąć niezmienność parametrów RTD2 i RTD3 oraz przekształcając odpowiednio układy równań (2) i (3) możemy utworzyć nowy układ równań z sześcioma równaniami i sześcioma niewiadomymi [8]
(4)
Jak wynika z układu równań (4) do wyznaczenia położenia terminala ruchomego w chwilach czasu n i n+1 nie jest więc konieczna znajomość różnic czasowych w syn-chronizacji poszczególnych stacji bazowych. W systemie UMTS zmienne t1(n) oraz t1(n+1) z powyższego układu równań można wyznaczyć na podstawie pomiarów parametru RTT, natomiast ti(n)+RTDi i ti(n+1)+RTDi (dla i=2,3) można obliczyć na podstawie numeracji ramek SFN-SFN [9]. W związku z tym powyższą metodę estymacji położenia terminala ruchomego możemy w skrócie nazwać hybrydową RTT+TDOA bez udziału jednostki LMU.
4.3. Metoda A-GPS
W metodzie A-GPS pomiary są wykonywane przez terminal ruchomy i są następnie przesyłane są do stacji bazowej w celu dalszego ich przetworzenia. Do ustalenia swojej pozycji terminal ruchomy wykorzystuje satelitarny system nawigacji GPS. Przy wykony-waniu pomiarów terminal ruchomy może być wspomagany przez sieć, szczególnie w przypadku wystąpienia warunków braku bezpośredniej widoczności wymaganej liczby satelitów, np. w terenie miejskim lub wewnątrz budynków. Takie rozwiązanie wymaga instalacji w terminalu ruchomym odbiornika sygnałów GPS oraz przesyłania do stacji bazowej uzyskanych wyników pomiarowych. Z implementacji odbiornika GPS w ter-minalu ruchomym wynikają pewne trudności. Przede wszystkim zostają zwiększone wymiary i waga terminala, a także zużycie baterii, co pociąga za sobą zmniejszenie autonomii samego terminala. Antena terminala powinna być zaprojektowana do pracy w paśmie systemu GPS (pasmo satelitarne L), jak i w paśmie danego systemu komór-kowego (dla systemu UMTS jest to pasmo 2 GHz). Dodatkową wadą metody A-GPS jest czas potrzebny na osiągnięcie przez odbiornik sygnałów GPS gotowości do wyznaczenia pozycji, wynoszący kilkadziesiąt sekund, co stanowi niedogodność w przypadku połączeń alarmowych, zgodnymi z dyrektywami E112.
W warunkach bezpośredniej widoczności satelitów lokalizowanie terminala rucho-mego przy użyciu metody A-GPS daje bardzo dokładne wyniki (20-30m). Jednak w przy-padku terenu miejskiego dokładność estymacji położenia terminala ruchomego wynosi już tylko 150 m, a wewnątrz budynków nawet 200m.
5. MODEL SYMULACYJNY
Podczas badań symulacyjnych wykorzystano model zabudowy oraz umiejscowienia stacji bazowych zalecany dla środowiska wielkomiejskiego w systemie UMTS [10]. Został on przedstawiony na rys.2. Model ten reprezentuje obszar tzw. trudny miejski (bad urban) charakterystyczny dla Manhattanu o powierzchni 6,5 km2. Na obszarze tym znajdują się 132 budynki oraz 72 stacje bazowe. Szerokość ulic wynosi 30 m, natomiast każdy budynek ma wymiar 200 m x 200 m. W modelu tym zakłada się również, że wzniesienie anten stacji bazowych jest o 10 m wyższe od anteny terminala ruchomego. Anteny stacji bazowych są umieszczone poniżej dachów budynków. Każda stacja bazowa posiada czterosektorową antenę.
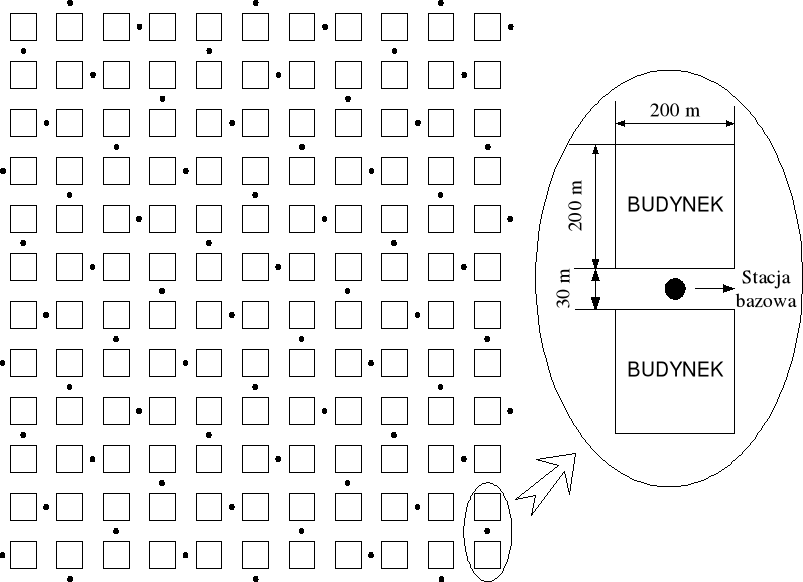
Rys.2. Model zabudowy zastosowany do badań symulacyjnych.
Na podstawie przeprowadzonych badań symulacyjnych wyznaczono dystrybuantę dla bezwzględnego błędu położenia terminala ruchomego, przy czym błąd ten określono w następujący sposób:
![]()
(5)
gdzie x oraz y reprezentują współrzędne rzeczywiste terminala ruchomego, natomiast x0 oraz y0 jego współrzędne obliczone.
Celem przeprowadzonych badań symulacyjnych było przede wszystkim określenie wpływu zabudowy na bezwzględny błąd położenia terminala ruchomego w zależności od przyjętej metody. Otrzymane w wyniku tych badań przebiegi dystrybuanty bezwzględnego błędu położenia terminala ruchomego zlokalizowanego w analizowanym obszarze oraz dla przyjętej dokładności wyznaczania opóźnień propagacyjnych równej ± ½ chipa (co odpo-wiada odległości ± 39m) zostały przedstawione na rys. 3. Dodatkowo, wynik każdej symulacji został obarczony błędem o rozkładzie normalnym i odchyleniu standardowym równym 2dB, wynikającym z niedokładności synchronizacji terminala ruchomego z po-szczególnymi stacjami bazowymi [11].
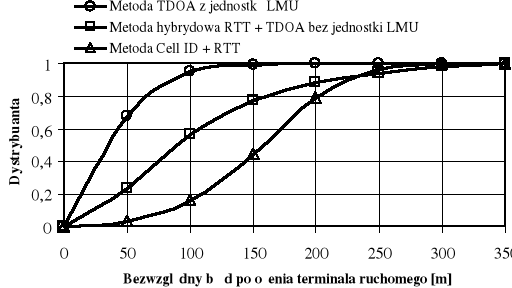
Rys.3. Dystrybuanta bezwzględnego błędu położenia terminala ruchomego
w zależności od zastosowanej metody.
Na rys.3 porównano efektywność estymacji położenia terminala ruchomego w syste-mie UMTS dla trzech metod. Z analizy tego rysunku wynika, że najlepsze rezultaty uzyskano dla metody TDOA przy założeniu, że znane są różnice w synchronizacji poszczególnych stacji bazowych (parametr RTD). Na szczególną uwagę zasługują rezultaty otrzymane dla zmodyfikowanej metody TDOA, w której został wykorzystany pomiar parametru RTT, ale bez konieczności pomiaru parametru RTD, czyli przy braku w syste-mie UMTS jednostek LMU. Otrzymane rezultaty dla tej metody spełniają wymogi programu E112 dla Państw Członkowskich. W świetle tych zaleceń w 67 % czasu bezwzględny błąd położenia terminala ruchomego powinien być mniejszy lub równy 125 m [2].
Najgorsze wyniki otrzymano dla najprostszej metody lokalizowania terminala rucho-mego, czyli Cell ID+RTT. W badaniach symulacyjnych nie została uwzględniona metoda A-GPS, czyli metoda lokalizowania terminala ruchomego wspomagana odbiornikiem sygnałów GPS. W opisanym powyżej modelu symulacyjnym (teren miejski silnie zurbani-zowany) odbiór sygnałów od poszczególnych satelitów jest bardzo utrudniony, szczególnie wewnątrz budynków. W związku z tym metoda ta musiałaby być wspomagana innymi metodami, a uzyskane rezultaty nie stanowiłyby obiektywnego materiału porównawczego.
6. PODSUMOWANIE
Problem lokalizowania terminala ruchomego w systemach komórkowych jest za-gadnieniem niezmiernie ważnym i aktualnym. W najbliższym czasie każdy operator sieci komórkowej będzie zmuszony wymogami Unii Europejskiej na implementację usługi lokalizowania terminala ruchomego z zadaną dokładnością. W związku z tym w wielu ośrodkach naukowych na świecie trwają prace badawcze nad algorytmami lokalizowania terminala ruchomego w sieciach komórkowych. Zaproponowana zmodyfikowana metoda TDOA dla potrzeb systemu UMTS stanowi oryginalny wkład autora w tej tematyce. Uzyskane rezultaty dla tej metody spełniają dyrektywy Unii Europejskiej w zakresie dokładności estymacji położenia terminala ruchomego w sieci komórkowej w środowisku wielkomiejskim.
BIBLIOGRAFIA
Hatfield D. N.: A Report on Technical and Operational Issues Impacting the Provision of Wireless Enhanced E911 Services. Federal Communications Commission, September 2002.
Report on Implementation Issues Related to Access to Location Information by Emergency Services (E112) in the European Union. CGALIES, February 2002.
3GPP Technical Specification: Technical Specification Group Radio Access Network; Stage 2 Functional Specification of Location Services in UTRAN. 3G TS 25.305.
Lee W., Kim J. Chung W.: Position Location Error Analysis by AOA and TDOA Using a Common Channel Model for CDMA Cellular Environments. Proc. Veh. Techn. Conf., Tokyo, 2000.
3GPP Technical Specification: Technical Specification Group Radio Access Network; Physical Layer - Measurements (FDD). 3G TS 25.215.
Stefański J., Gajewski S.: Lokalizowanie stacji ruchomej w systemie UMTS. Materiały konferencyjne URSI, Poznań, 2002, s. 204 - 208.
Chan Y. T., Ho K. C.: A Simple and Efficient Estimator for Hyperbolic Location. IEEE Transactions on Signal Processing, vol. 42, no. 8, August 1994, pp. 1905-1915.
Stefański J.: Uproszczony algorytm lokalizowania stacji ruchomej w systemie UMTS. Materiały konferencyjne KKRRiT, Warszawa, 2004, s. 361-364.
3GPP Technical Specification: Technical Specification Group Radio Access Network; Physical Layer - Measurements (FDD). 3G TS 25.215.
ETSI: Universal Mobile Telecommunications System (UMTS); Selection procedures for the choice of radio transmission technologies of the UMTS. TR 101 112, ver. 3.2.0, Apr. 1998.
Berg M.: Performance of Mobile Station Location Methods in a Manhattan Microcellular Environment. 3GW, San Francisco, USA, June 2001.
EFFECIENCY OF LOCATION ESTIMATION FOR MOBILE STATION IN 3G SYSTEM
Summary
A problem of location for a mobile station in 3G system is outlined. Three different methods of location estimation: Cell ID + RTT, TDOA and modified TDOA are considered and the corresponding simulation results for an example of bad urban area are compared.
436
Jacek Stefański
437
Efektywność estymacji położenia terminala ruchomego w sieciach...
ZESZYTY NAUKOWE WYDZIAŁU ETI POLITECHNIKI GDAŃSKIEJ
Nr 6 |
Seria: Technologie Informacyjne |
2005 |
Wyszukiwarka