Dobór nastawień regulatora.
1) Metoda Zielenga-Nicholsa.
Opierającej się na kryterium całkowym
I= * min.
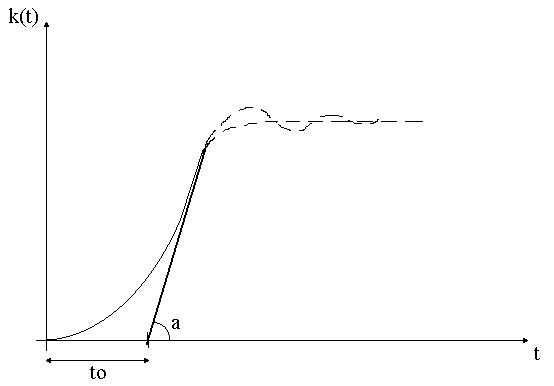
Znając odpowiedź skokową układu określimy czas opóźnienia to i nachylenie a.
|
K |
Ti |
Td |
PID |
1,2/(a*to) |
2*to |
0,5*to |
2) Drugi sposób nie wymaga znajomości odpowiedzi skokowej układu.
Wyłanczamy nastawy Ti, Td i regulujemy kp tak aby w układzie pojawiły się oscylacje. Odczytujemy wzmocnienie kOSCYLACJI regulatora P oraz mierzymy okres oscylacji TOSCYLACJI. Znając te dwie wielkości wyznaczamy nastawy regulatora:
|
Kp |
Ti |
Td |
PID |
0,6* kOSCYLACJI |
0,5 TOSCYLACJI |
0,12* TOSCYLACJI |
My dobraliśmy nastawy regulatora na podstawie metody Zielenga - Nicholsa.
W myśl tej zasady nastawy Ti oraz Td dla regulatora PID:
Ti=2*to
Td=0,5*to
Gdzie to jest to czas opóźnienia odpowiedzi składowej układu.
Wykresy - 3a przedstawiają przebieg regulacji poziomu wody oraz przebieg regulacji temperatury. Dobrano dla nich następujące nastawy regulatora:
-dla poziomu wody H Ti=3.0, Td=10.0
-dla temperatury T Ti=40.00, Td=10.0
Z wykresów widać że regulacja pod kątem temperatury jest dobra, więc nastawy
są poprawne. Natomiast regulacja poziomu wody jest niepoprawna, układ źle utzrymuje poziom H=15 cm. Zbyt mała wartość Ti (stałej całkowania) wpływa negatywnie na dynamikę układu oraz na siłę z jaką układ zaczyna reagować na zmiany poziomu. Nieprawidłowość doboru nastaw regulatora dobrze unaocznia
zalerzność wynikająca z metody Zielenga - Nicholsa:
Ti*4*Td
W naszym przypadku zalerzność ta nie jest spełniona.
Wykresy - 3b przedstawiają przebieg regulacji dla nastawów:
-poziomu wody H Ti=12.0, Td=3.0
-temperatury T Ti=40.00, Td=8.0
Dla nowych nastawów regulacja przebiega idealnie. Może to być pozostałością ustalenia się parametrów, dlatego wprowadzamy do układu jednorazowe zakucenie (dolewamy ciepłej wody). Układ zareagował na nie z dostateczną silą dlatego też można przyjąć że parametr Ti został poprawnie oszacowany.
Zmniejszyliśmy czas wyprzedzenia Td, który określa intensywność działania różniczkującego regulatora. Taki krok pozwala nam zmniejszyć podatność układu na zakłócenia i szumy przetwornika, i w konsekwencji polepszenie regulacji.
Wyszukiwarka