Laboratorium przetworników i układów pomiarowych |
||
AUTOMATYKA I ROBOTYKA V sem. Środa godz. 730 |
Krzywicki Bartosz Lelek Paweł Malcherek Grzegorz |
Ćwiczenie nr 1 1998-10-21 |
TEMAT: Niezrównoważone układy mostkowe. |
|
|
Cel ćwiczenia.
Celem ćwiczenia jest poznanie własności układów mostkowych i zasad doboru elementów układu mostkowego.
Poglądowy schemat układu pomiarowego.
Dla mostka niezrównoważonego względem przekątnej zasilania R2 = R4.
Dla mostka niezrównoważonego względem przekątnej zerowej R3 = R4.
Przyrządy użyte podczas ćwiczenia:
pięć opornic dekadowe kl. 0,05;
multimetr;
transformator ze stabilizatorem napięcia.
3. Obliczenia wstępne.
W miejsce przetworników wstawione zostały opornice dekadowe, symulujące zależności:
dla elementu pomiarowego - Rp = (R0 + apX)(1 + bZ);
dla elementu porównawczego - Rk = (R0 + akX)(1+ bZ);
Gdzie:
X - wielkość mierzona;
Z - wielkość wpływająca (zakłócenie);
R0, ap, ak i b - wielkości stałe.
R0 =100; ap = 0,4; ak = -0,4; Z=0 |
R0 =100; ap = 0,4; ak = -0,4; X = 50; b = 0,1 |
||||
X |
Rp |
Rk |
Z |
Rp |
Rk |
10 |
104 |
96 |
1 |
132 |
88 |
20 |
108 |
92 |
2 |
144 |
96 |
30 |
112 |
88 |
3 |
156 |
104 |
40 |
116 |
84 |
4 |
168 |
112 |
50 |
120 |
80 |
5 |
180 |
120 |
60 |
124 |
76 |
6 |
192 |
128 |
70 |
128 |
72 |
7 |
204 |
136 |
80 |
132 |
68 |
8 |
216 |
144 |
90 |
136 |
64 |
9 |
228 |
152 |
100 |
140 |
60 |
10 |
240 |
160 |
Optymalna wartość 
Mostek niezrównoważony względem przekątnej zasilania: R2 = R4.
Rg = 100 [W] |
||||||||
R2=R4[W] |
Ug [V] |
Pg [W] |
R2=R4[W] |
Ug [V] |
Pg [W] |
R2=R4[W] |
Ug [V] |
Pg [W] |
10 |
|
|
200 |
|
|
3000 |
|
|
20 |
|
|
300 |
|
|
4000 |
|
|
30 |
|
|
400 |
|
|
5000 |
|
|
40 |
|
|
500 |
|
|
6000 |
|
|
50 |
|
|
600 |
|
|
7000 |
|
|
60 |
|
|
700 |
|
|
8000 |
|
|
70 |
|
|
800 |
|
|
9000 |
|
|
80 |
|
|
900 |
|
|
10000 |
|
|
90 |
|
|
1000 |
|
|
|
||
100 |
|
|
2000 |
|
|
|
||
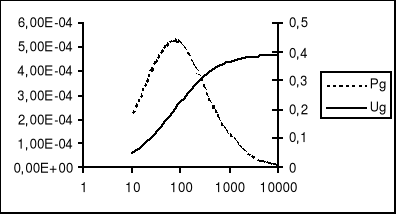
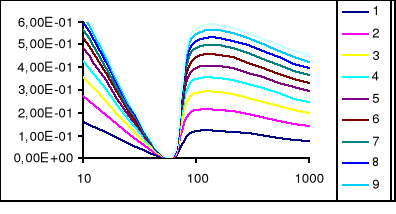
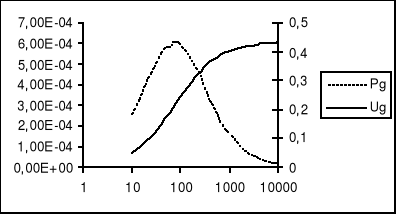
Charakterystyka Pg = f(R4) i Ug = f(R4).
R2 = R4 = 57,7 [W] |
||||||||
Rg [W] |
Ug [V] |
Pg [W] |
Rg [W] |
Ug [V] |
Pg [W] |
Rg [W] |
Ug [V] |
Pg [W] |
10 |
0,048 |
2,30E-04 |
100 |
0,227 |
5,15E-04 |
1000 |
0,366 |
1,34E-04 |
20 |
0,085 |
3,61E-04 |
200 |
0,287 |
4,12E-04 |
2000 |
0,378 |
7,14E-05 |
30 |
0,115 |
4,41E-04 |
300 |
0,315 |
3,31E-04 |
3000 |
0,383 |
4,89E-05 |
40 |
0,139 |
4,83E-04 |
400 |
0,331 |
2,74E-04 |
4000 |
0,385 |
3,71E-05 |
50 |
0,16 |
5,12E-04 |
500 |
0,342 |
2,34E-04 |
5000 |
0,386 |
2,98E-05 |
60 |
0,177 |
5,22E-04 |
600 |
0,349 |
2,03E-04 |
6000 |
0,388 |
2,51E-05 |
70 |
0,192 |
5,27E-04 |
700 |
0,355 |
1,80E-04 |
7000 |
0,388 |
2,15E-05 |
80 |
0,205 |
5,25E-04 |
800 |
0,359 |
1,61E-04 |
8000 |
0,389 |
1,89E-05 |
90 |
0,217 |
5,23E-04 |
900 |
0,364 |
1,47E-04 |
9000 |
0,389 |
1,68E-05 |
100 |
0,227 |
5,15E-04 |
1000 |
0,366 |
1,34E-04 |
10000 |
0,389 |
1,51E-05 |
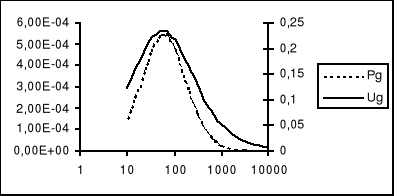
Charakterystyka Pg = f(Rg) i Ug = f(Rg).
Rg =100 [W] |
||||
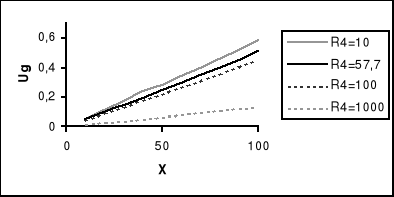
X |
R2 = R4 = 10[W] |
R2 = R4 = 57,7[W] |
R2 = R4 = 100[W] |
R2 = R4 = 1000[W] |
10 |
0,023 |
0,046 |
0,043 |
0,01 |
20 |
0,047 |
0,092 |
0,086 |
0,021 |
30 |
0,072 |
0,138 |
0,130 |
0,031 |
40 |
0,097 |
0,186 |
0,174 |
0,041 |
50 |
0,123 |
0,234 |
0,218 |
0,051 |
60 |
0,150 |
0,283 |
0,264 |
0,061 |
70 |
0,178 |
0,334 |
0,310 |
0,072 |
80 |
0,208 |
0,386 |
0,357 |
0,082 |
90 |
0,240 |
0,441 |
0,406 |
0,092 |
100 |
0,275 |
0,498 |
0,457 |
0,102 |
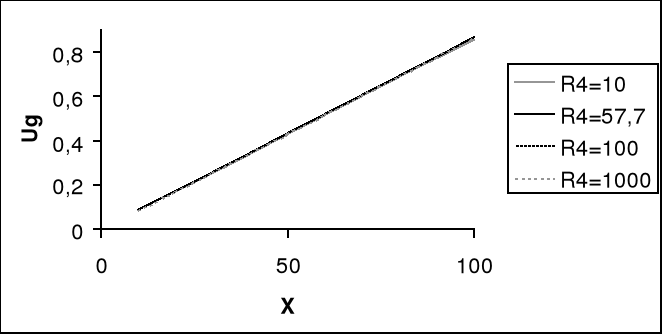
Rg = Ą |
||||
X |
R2 = R4 = 10[W] |
R2 = R4 = 57,7[W] |
R2 = R4 = 100[W] |
R2 = R4 = 1000[W] |
10 |
0,027 |
0,079 |
0,086 |
0,029 |
20 |
0,055 |
0,158 |
0,171 |
0,057 |
30 |
0,084 |
0,237 |
0,257 |
0,086 |
40 |
0,113 |
0,318 |
0,344 |
0,115 |
50 |
0,143 |
0,400 |
0,431 |
0,143 |
60 |
0,173 |
0,483 |
0,520 |
0,172 |
70 |
0,207 |
0,569 |
0,609 |
0,200 |
80 |
0,241 |
0,657 |
0,700 |
0,229 |
90 |
0,277 |
0,712 |
0,771 |
0,256 |
100 |
0,315 |
0,803 |
0,851 |
0,285 |
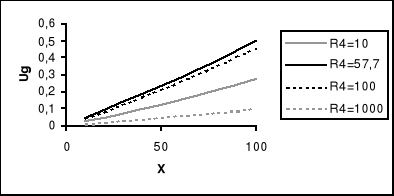
Charakterystyka Ug = f(X) przy Rg = 100 W.
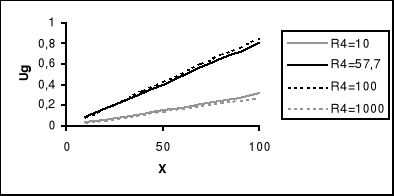
Charakterystyka Ug = f(X) przy Rg = Ą.
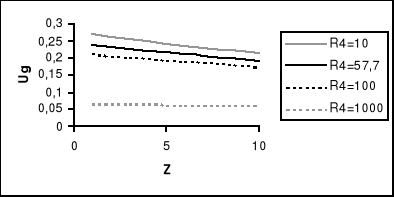
Rg =100 [W] |
||||
Z |
R2 = R4 = 10[W] |
R2 = R4 = 57,7[W] |
R2 = R4 = 100[W] |
R2 = R4 = 1000[W] |
1 |
0,114 |
0,224 |
0,213 |
0,052 |
2 |
0,106 |
0,215 |
0,207 |
0,053 |
3 |
0,099 |
0,208 |
0,202 |
0,054 |
4 |
0,093 |
0,200 |
0,197 |
0,055 |
5 |
0,088 |
0,193 |
0,192 |
0,055 |
6 |
0,083 |
0,186 |
0,187 |
0,055 |
7 |
0,078 |
0,179 |
0,182 |
0,055 |
8 |
0,075 |
0,171 |
0,177 |
0,056 |
9 |
0,071 |
0,167 |
0,173 |
0,056 |
10 |
0,068 |
0,162 |
0,168 |
0,056 |
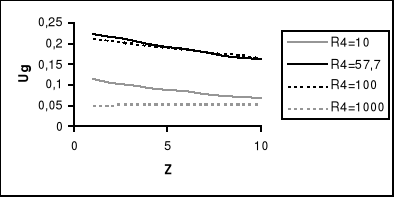
Charakterystyka Ug = f(Z).
Błędy miernika:
Błąd nieliniowości miernika
Błąd nieliniowości sU przy Rg =100 [W] |
||||
X |
R2 = R4 = 10[W] |
R2 = R4 = 57,7[W] |
R2 = R4 = 100[W] |
R2 = R4 = 1000[W] |
10 |
8,28E-04 |
9,39E-05 |
4,53E-05 |
3,28E-06 |
20 |
3,31E-03 |
3,76E-04 |
1,81E-04 |
1,31E-05 |
30 |
7,45E-03 |
8,45E-04 |
4,08E-04 |
2,96E-05 |
40 |
1,32E-02 |
1,50E-03 |
7,25E-04 |
5,25E-05 |
50 |
2,07E-02 |
2,35E-03 |
1,13E-03 |
8,21E-05 |
60 |
2,98E-02 |
3,38E-03 |
1,63E-03 |
1,18E-04 |
70 |
4,06E-02 |
4,60E-03 |
2,22E-03 |
1,61E-04 |
80 |
5,30E-02 |
6,01E-03 |
2,90E-03 |
2,10E-04 |
90 |
6,70E-02 |
7,61E-03 |
3,67E-03 |
2,66E-04 |
100 |
8,28E-02 |
9,39E-03 |
4,53E-03 |
3,28E-04 |
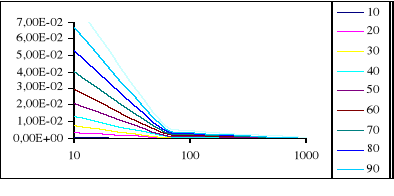
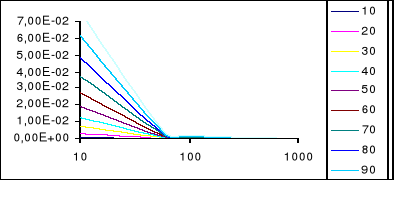
Zależność błędu nieliniowości od R4 przy Rg = 100W i zmianie X w przedziale 10-100.
Błąd nieliniowości sU przy Rg = Ą |
||||
X |
R2 = R4 = 10[W] |
R2 = R4 = 57,7[W] |
R2 = R4 = 100[W] |
R2 = R4 = 1000[W] |
10 |
7,62E-04 |
4,59E-05 |
1,57E-05 |
1,60E-07 |
20 |
3,05E-03 |
1,84E-04 |
6,28E-05 |
6,41E-07 |
30 |
6,86E-03 |
4,13E-04 |
1,41E-04 |
1,44E-06 |
40 |
1,22E-02 |
7,34E-04 |
2,51E-04 |
2,56E-06 |
50 |
1,90E-02 |
1,15E-03 |
3,92E-04 |
4,00E-06 |
60 |
2,74E-02 |
1,65E-03 |
5,65E-04 |
5,77E-06 |
70 |
3,73E-02 |
2,25E-03 |
7,69E-04 |
7,85E-06 |
80 |
4,88E-02 |
2,94E-03 |
1,00E-03 |
1,02E-05 |
90 |
6,17E-02 |
3,72E-03 |
1,27E-03 |
1,30E-05 |
100 |
7,62E-02 |
4,59E-03 |
1,57E-03 |
1,60E-05 |
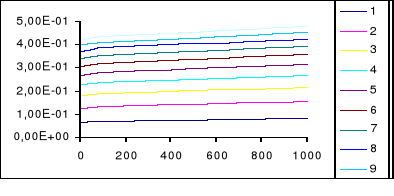
Zależność błędu nieliniowości od R4 przy Rg = Ą i zmianie X w przedziale 10-100.
Błąd dodatkowy miernika:
Błąd dodatkowy przy X = 50 i Rg =100 [W] |
||||
Z |
R2 = R4 = 10[W] |
R2 = R4 = 57,7[W] |
R2 = R4 = 100[W] |
R2 = R4 = 1000[W] |
1 |
1,57E-01 |
1,75E-04 |
1,17E-01 |
7,60E-02 |
2 |
2,71E-01 |
3,49E-04 |
2,10E-01 |
1,41E-01 |
3 |
3,58E-01 |
5,24E-04 |
2,85E-01 |
1,98E-01 |
4 |
4,26E-01 |
6,99E-04 |
3,47E-01 |
2,48E-01 |
5 |
4,82E-01 |
8,73E-04 |
3,99E-01 |
2,92E-01 |
6 |
5,27E-01 |
1,05E-03 |
4,43E-01 |
3,31E-01 |
7 |
5,65E-01 |
1,22E-03 |
4,82E-01 |
3,66E-01 |
8 |
5,98E-01 |
1,40E-03 |
5,15E-01 |
3,97E-01 |
9 |
6,26E-01 |
1,57E-03 |
5,44E-01 |
4,26E-01 |
10 |
6,50E-01 |
1,74E-03 |
5,70E-01 |
4,51E-01 |
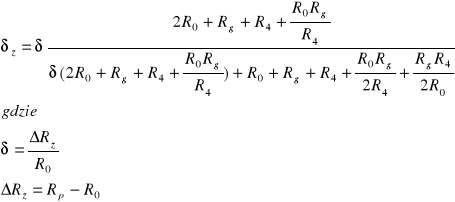
Zależność błędu dodatkowego od R4.
Mostek niezrównoważony z symetrią względem przekątnej zerowej: R3 = R4.
Rg = 100 [W]; X = 50 [W] |
||||||||
R2=R4[W] |
Ug [V] |
Pg [W] |
R2=R4[W] |
Ug [V] |
Pg [W] |
R2=R4[W] |
Ug [V] |
Pg [W] |
10 |
0,277 |
7,67E-03 |
100 |
0,194 |
3,76E-04 |
1000 |
0,067 |
4,49E-06 |
20 |
0,271 |
3,67E-03 |
200 |
0,175 |
1,53E-04 |
2000 |
0,038 |
7,22E-07 |
30 |
0,263 |
2,31E-03 |
300 |
0,146 |
7,11E-05 |
3000 |
0,027 |
2,43E-07 |
40 |
0,257 |
1,65E-03 |
400 |
0,126 |
3,97E-05 |
4000 |
0,02 |
1,00E-07 |
50 |
0,249 |
1,24E-03 |
500 |
0,109 |
2,38E-05 |
5000 |
0,017 |
5,78E-08 |
60 |
0,242 |
9,76E-04 |
600 |
0,097 |
1,57E-05 |
6000 |
0,014 |
3,27E-08 |
70 |
0,236 |
7,96E-04 |
700 |
0,087 |
1,08E-05 |
7000 |
0,012 |
2,06E-08 |
80 |
0,224 |
6,27E-04 |
800 |
0,079 |
7,80E-06 |
8000 |
0,011 |
1,51E-08 |
90 |
0,219 |
5,33E-04 |
900 |
0,073 |
5,92E-06 |
9000 |
0,01 |
1,11E-08 |
100 |
0,194 |
3,76E-04 |
1000 |
0,067 |
4,49E-06 |
10000 |
0,009 |
8,10E-09 |
Charakterystyka Pg = f(R4) i Ug = f(R4).
R3 = R4 = 57,7 [W] |
||||||||
Rg [W] |
Ug [V] |
Pg [W] |
Rg [W] |
Ug [V] |
Pg [W] |
Rg [W] |
Ug [V] |
Pg [W] |
10 |
0,05 |
2,50E-04 |
100 |
0,244 |
5,95E-04 |
1000 |
0,402 |
1,62E-04 |
20 |
0,09 |
4,05E-04 |
200 |
0,313 |
4,90E-04 |
2000 |
0,417 |
8,69E-05 |
30 |
0,121 |
4,88E-04 |
300 |
0,345 |
3,97E-04 |
3000 |
0,422 |
5,94E-05 |
40 |
0,148 |
5,48E-04 |
400 |
0,363 |
3,29E-04 |
4000 |
0,425 |
4,52E-05 |
50 |
0,17 |
5,78E-04 |
500 |
0,375 |
2,81E-04 |
5000 |
0,427 |
3,65E-05 |
60 |
0,187 |
5,83E-04 |
600 |
0,384 |
2,46E-04 |
6000 |
0,428 |
3,05E-05 |
70 |
0,206 |
6,06E-04 |
700 |
0,39 |
2,17E-04 |
7000 |
0,429 |
2,63E-05 |
80 |
0,22 |
6,05E-04 |
800 |
0,395 |
1,95E-04 |
8000 |
0,429 |
2,30E-05 |
90 |
0,233 |
6,03E-04 |
900 |
0,399 |
1,77E-04 |
9000 |
0,43 |
2,05E-05 |
100 |
0,244 |
5,95E-04 |
1000 |
0,402 |
1,62E-04 |
10000 |
0,433 |
1,87E-05 |
Charakterystyka Pg = f(Rg) i Ug = f(Rg).
Rg =100 [W] |
||||
X |
R2 = R4 = 10[W] |
R2 = R4 = 57,7[W] |
R2 = R4 = 100[W] |
R2 = R4 = 1000[W] |
10 |
0,055 |
0,048 |
0,044 |
0,014 |
20 |
0,111 |
0,097 |
0,087 |
0,027 |
30 |
0,166 |
0,146 |
0,131 |
0,04 |
40 |
0,233 |
0,195 |
0,175 |
0,054 |
50 |
0,28 |
0,245 |
0,219 |
0,067 |
60 |
0,338 |
0,295 |
0,264 |
0,081 |
70 |
0,397 |
0,346 |
0,309 |
0,094 |
80 |
0,457 |
0,398 |
0,355 |
0,108 |
90 |
0,519 |
0,451 |
0,403 |
0,122 |
100 |
0,583 |
0,506 |
0,451 |
0,135 |
Rg = Ą |
||||
X |
R2 = R4 = 10[W] |
R2 = R4 = 57,7[W] |
R2 = R4 = 100[W] |
R2 = R4 = 1000[W] |
10 |
0,086 |
0,087 |
0,088 |
0,086 |
20 |
0,171 |
0,173 |
0,174 |
0,173 |
30 |
0,257 |
0,26 |
0,261 |
0,26 |
40 |
0,343 |
0,346 |
0,347 |
0,346 |
50 |
0,429 |
0,433 |
0,434 |
0,433 |
60 |
0,515 |
0,52 |
0,521 |
0,519 |
70 |
0,601 |
0,606 |
0,607 |
0,605 |
80 |
0,687 |
0,693 |
0,694 |
0,691 |
90 |
0,773 |
0,779 |
0,78 |
0,778 |
100 |
0,859 |
0,866 |
0,867 |
0,864 |
Charakterystyka Ug = f(X) przy Rg = 100W.
Charakterystyka Ug = f(X) przy Rg =Ą.
Rg =100 [W] |
||||
Z |
R2 = R4 = 10[W] |
R2 = R4 = 57,7[W] |
R2 = R4 = 100[W] |
R2 = R4 = 1000[W] |
1 |
0,271 |
0,238 |
0,214 |
0,067 |
2 |
0,263 |
0,232 |
0,209 |
0,066 |
3 |
0,256 |
0,226 |
0,204 |
0,066 |
4 |
0,248 |
0,22 |
0,2 |
0,066 |
5 |
0,242 |
0,216 |
0,195 |
0,065 |
6 |
0,235 |
0,21 |
0,191 |
0,064 |
7 |
0,23 |
0,206 |
0,188 |
0,064 |
8 |
0,224 |
0,201 |
0,184 |
0,064 |
9 |
0,219 |
0,197 |
0,18 |
0,063 |
10 |
0,213 |
0,193 |
0,176 |
0,063 |
Charakterystyka Ug = f(Z) przy Rg =100W.
Błędy miernika:
Błąd nieliniowości miernika
Błąd nieliniowości sU przy Rg =100 [W] |
||||
X |
R2 = R4 = 10[W] |
R2 = R4 = 57,7[W] |
R2 = R4 = 100[W] |
R2 = R4 = 1000[W] |
10 |
5,16E-04 |
4,47E-04 |
4,00E-04 |
1,23E-04 |
20 |
2,06E-03 |
1,79E-03 |
1,60E-03 |
4,92E-04 |
30 |
4,65E-03 |
4,03E-03 |
3,60E-03 |
1,11E-03 |
40 |
8,26E-03 |
7,16E-03 |
6,40E-03 |
1,97E-03 |
50 |
1,29E-02 |
1,12E-02 |
1,00E-02 |
3,08E-03 |
60 |
1,86E-02 |
1,61E-02 |
1,44E-02 |
4,43E-03 |
70 |
2,53E-02 |
2,19E-02 |
1,96E-02 |
6,03E-03 |
80 |
3,30E-02 |
2,86E-02 |
2,56E-02 |
7,88E-03 |
90 |
4,18E-02 |
3,62E-02 |
3,24E-02 |
9,97E-03 |
100 |
5,16E-02 |
4,47E-02 |
4,00E-02 |
1,23E-02 |
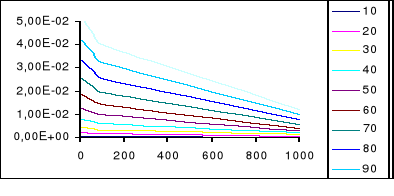
Zależność błędu nieliniowości od R4 przy Rg = 100W i zmianie X w przedziale 10-100.
Błąd nieliniowości sU przy Rg = Ą |
||||
X |
R2 = R4 = 10[W] |
R2 = R4 = 57,7[W] |
R2 = R4 = 100[W] |
R2 = R4 = 1000[W] |
10 |
8,00E-08 |
8,00E-08 |
8,00E-08 |
8,00E-08 |
20 |
3,20E-07 |
3,20E-07 |
3,20E-07 |
3,20E-07 |
30 |
7,20E-07 |
7,20E-07 |
7,20E-07 |
7,20E-07 |
40 |
1,28E-06 |
1,28E-06 |
1,28E-06 |
1,28E-06 |
50 |
2,00E-06 |
2,00E-06 |
2,00E-06 |
2,00E-06 |
60 |
2,88E-06 |
2,88E-06 |
2,88E-06 |
2,88E-06 |
70 |
3,92E-06 |
3,92E-06 |
3,92E-06 |
3,92E-06 |
80 |
5,12E-06 |
5,12E-06 |
5,12E-06 |
5,12E-06 |
90 |
6,48E-06 |
6,48E-06 |
6,48E-06 |
6,48E-06 |
100 |
8,00E-06 |
8,00E-06 |
8,00E-06 |
8,00E-06 |
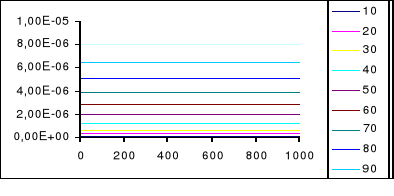
Zależność błędu nieliniowości od R4 przy Rg = Ą i zmianie X w przedziale 10-100.
Błąd dodatkowy miernika:
Błąd dodatkowy przy X = 50 i Rg =100 [W] |
||||
Z |
R2 = R4 = 10[W] |
R2 = R4 = 57,7[W] |
R2 = R4 = 100[W] |
R2 = R4 = 1000[W] |
1 |
6,83E-02 |
7,05E-02 |
7,22E-02 |
8,40E-02 |
2 |
1,28E-01 |
1,32E-01 |
1,35E-01 |
1,55E-01 |
3 |
1,80E-01 |
1,85E-01 |
1,89E-01 |
2,16E-01 |
4 |
2,27E-01 |
2,33E-01 |
2,37E-01 |
2,68E-01 |
5 |
2,68E-01 |
2,75E-01 |
2,80E-01 |
3,14E-01 |
6 |
3,06E-01 |
3,13E-01 |
3,18E-01 |
3,55E-01 |
7 |
3,39E-01 |
3,47E-01 |
3,53E-01 |
3,91E-01 |
8 |
3,70E-01 |
3,78E-01 |
3,84E-01 |
4,23E-01 |
9 |
3,98E-01 |
4,06E-01 |
4,12E-01 |
4,52E-01 |
10 |
4,23E-01 |
4,31E-01 |
4,38E-01 |
4,78E-01 |
Zależność błędu dodatkowego od R4.
6. Wnioski.
W mostku z symetrią względem przekątnej zasilania napięcie Ug i moc Pg osiągają maksymalną wartość przy wartości R4=60W, a więc zbliżonej do wartości optymalnej R4=57,7W. Dla mostka z symetrią względem przekątnej zerowej napięcie Ug i moc Pg maksymalną wartość uzyskują dla małych wartości R4. Natomiast przy zadanym R4, a zmiennym Rg krzywa mocy i napięcia w obu rodzajach mostków przybiera zbieżne wartości.
Napięcie przekątnej zerowej jest liniową zależnością wielkości mierzonej X, niezależnie od rodzaju niezrównoważonego mostka. Wpływ wielkości zakłócającej jest niezależny od typu mostka i dla małych wartości powoduje liniowy spadek napięcia Ug. Natomiast przy dużych wartościach R4 wzrost zakłócenia nie ma wpływu na wartość Ug.
Dla mostka z symetrią względem przekątnej zasilania błędy nieliniowości maleją ze wzrostem R4 w obydwu przypadkach. Najmniejszy błąd nieliniowości uzyskujemy dla małych wielkości mierzonych X. W mostku z symetrią względem przekątnej zerowej przy Rg=Ą błędy nieliniowości są niezależne od R4, ich wielkość zależna jest tylko od X.
Błąd dodatkowy w funkcji R4 dla pierwszego typu mostka maleje ze wzrostem R4, dla drugiego typu mostka sytuacja jest odwrotna.
Wyszukiwarka