METODA FUNKCJI OPISUJĄCEJ
Metoda funkcji opisującej jest metodą przybliżoną.
Istotą metody jest pominięcie wyższych harmonicznych odpowiedzi członu nieliniowego na wymuszenie sinusoidalne.
Funkcja opisująca jest przybliżoną transmitancją elementu przy założeniu, że sygnał wejściowy elementu nieliniowego jest sinusoidalny. Zależność ta jest spełniona gdy, jeżeli część liniowa układu ma silne właściwości filtru dolnoprzepustowego.
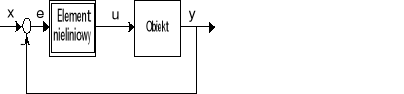
Rys. 1. Schemat blokowy rozpatrywanego nieliniowego układu automatycznej regulacji
Stosując metodę funkcji opisującej można określić charakter układu przedstawionego na rys. (1), a także znaleźć jego cykle graniczne, czyli doprowadzić układ do drgań przy stałej amplitudzie i stałym okresie.
Przy założeniu, że element nieliniowy układu z rysunku (1) można opisać nieliniowym równaniem różniczkowym:
![]()
![]()
(1)
gdzie:
bk,ai - współczynniki równania dla k=0,1,...,n oraz i=0,1,...,m
oraz uchyb układu jest harmoniczny:
![]()
(2)
to wyjście y elementu nieliniowego można zapisać w postaci funkcji zależnej od amplitudy A, pulsacji ω i współczynników równania
![]()
dla 
(3)
Funkcję (3) można rozwinąć w szereg Fouriera

(4)
gdzie:
(5)

(6)

(7)
Dla składowej statycznej elementu nieliniowego, symetrycznej względem początku układu współrzędnych składowa stała sygnału wyjściowego y(t) C0=0.
Jeżeli rozpatrywane są nieliniowe elementy statyczne, współczynniki Br i Cr zależą tylko od amplitudy sygnału wejściowego i od współczynników a0, b0 i c0 równania opisującego te elementy.
W ogólnym przypadku współczynniki rozwinięcia w szereg Fouriera zależą od amplitudy i pulsacji sygnału wymuszającego .
Jeżeli część liniowa układu z rys. (1) wykazuje właściwości filtru dolnoprzepustowego tłumiące wyższe harmoniczne, to rozwinięcie w szereg Fouriera sygnału y można ograniczyć do jego pierwszej składowej.
![]()
(8)
gdzie:
(9)
(10)
Funkcją opisującą J(A,ω) elementu nieliniowego nazywamy iloraz
|

(11)
gdzie:
A - amplituda wymuszenia sinusoidalnego o pulsacji ω,
B1,C1 - współczynniki opisane wzorami (9,10).
Dla nieliniowych elementów statycznych funkcja opisująca nie zależy od pulsacji ω wymuszenia e(t). Wtedy wzór (11) sprowadzić można do:

. (11)
Dla statycznych elementów nieliniowych, których charakterystyki statyczne są jednoznaczne, współczynnik C1=0. Ich funkcje opisujące są więc funkcjami rzeczywistymi zależnymi od amplitudy A i od kształtu charakterystyki statycznej elementu nieliniowego.

(12)
Odpowiedzią idealnego przekaźnika na wymuszenie harmoniczne jest fala prostokątna o wypełnieniu 50% i amplitudzie B (rys.2)
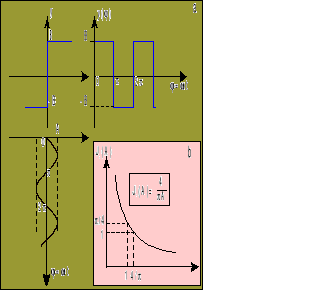
Rys.2 Odpowiedź przekaźnika na wymuszenie harmoniczne (a) i wykres znormalizowanej funkcji opisującej idealnego przekaźnika (b)
Charakterystyka statyczna przekaźnika jest jednoznaczna, więc jego funkcja opisująca jest równa:
![]()
, gdyż (13)

, (14)
Dla dowolnej amplitudy przekaźnika B można znormalizować funkcję opisującą, wtedy
![]()
(15)
Wykres znormalizowanej funkcji opisującej przekaźnika został przedstawiony na rysunku (2b).
Badanie nieliniowych UAR metodą funkcji opisującej
Funkcja opisująca przekaźnika jest wykorzystywana przy badaniu dynamiki obiektów regulacji. Badany jest układ regulacji automatycznej przedstawiony na rys. (3).
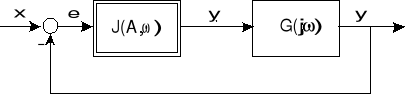
Rys. 3. Badany nieliniowy układ regulacji automatycznej
Funkcja opisująca członu nieliniowego jest odpowiednikiem transmitancji widmowej członu linowego. W ogólnym przypadku funkcja opisująca zależy od amplitudy i pulsacji sygnału wejściowego. Równanie charakterystyczne układu ma postać:
![]()
(16)
Z tego równania można wyprowadzić warunek powstawania drgań harmonicznych (cyklu granicznego)
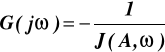
(17)
Przedstawiając na płaszczyźnie zmiennej zespolonej charakterystykę G(jω) części liniowej oraz krzywą -1/J(A,ω) możemy znaleźć punkt krytyczny leżący na przecięciu się obu wykresów. Określa on amplitudę i pulsację drgań harmonicznych; układ jest wówczas niestabilny asymptotycznie.
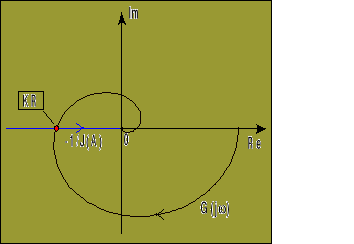
Rys. 4. Charakterystyki układu z J(a) równą funkcji opisującej idealnego przekaźnika. KR - punkt określający cykl stabilny.
Idea metody funkcji opisującej jest np. wykorzystana w realizacji automatycznego doboru nastaw regulatorów cyfrowych (samonastrajanie STR ) w tzw. algorytmie oscylacji wymuszonych zaproponowanym pierwotnie przez Åströma-Häglunda. Bazuje on na stwierdzeniu, że obiekt o opóźnieniu fazowym przynajmniej π, przy wysokich częstotliwościach, może osiągnąć oscylacje o okresie tc pod kontrolą przekaźnika. Obiekt jest połączony w pętli sprzężenia zwrotnego z przekaźnikiem (rys. 5).
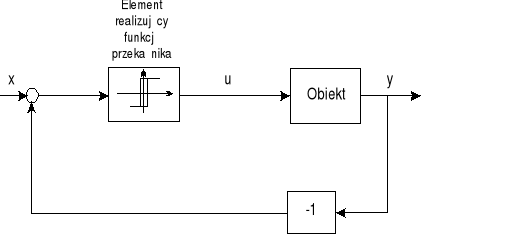
Rys. 5. Diagram blokowy układu samonastrajania metodą oscylacji wymuszonych
Uchyb staje się więc sygnałem oscylującym o okresie tc. Jeżeli przyjmiemy amplitudę przekaźnika równą B, to z rozwinięcia w szereg Fouriera można dowieść, że pierwsza harmoniczna sygnału wyjściowego przekaźnika u ma amplitudę 4d/π. Jeżeli A jest amplitudą odpowiedzi obiektu y, to wzmocnienie krytyczne obiektu jest równe:
![]()
(18)
Ten sam wynik można uzyskać z przybliżenia funkcją opisującą. Należy zauważyć, że funkcja opisująca idealnego przekaźnika ma dokładnie taki sam wzór jak .
Zaletą tej metody jest to, że można łatwo kontrolować amplitudę cykli krytycznych dobierając odpowiednio amplitudę przekaźnika. Znając punkt krytyczny charakterystyki Nyquista można dobrać nastawy regulatora PID według tradycyjnych reguł Zieglera-Nicholsa lub innych.
Często zamiast idealnego przekaźnika stosuje się przekaźnik z histerezą. Układ z takim przekaźnikiem jest mniej czuły na zakłócenia pomiarów. Przekaźnik z histerezą przełącza się dopiero wtedy, gdy sygnał wyjściowy z obiektu PV przekroczy wartość zadaną SP o określoną wartość.
Funkcja opisująca przekaźnika z histerezą:
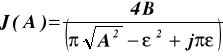
, (19)
gdzie:
B - amplituda przekaźnika,
ε - histereza przekaźnika,
A - amplituda sygnału wyjściowego obiektu PV.
Jak można zauważyć dla ε=0 równanie jest równoważne funkcji opisującej idealnego przekaźnika. Dla ![]()
wzmocnienie i okres wyznaczone z oscylacji nie są dokładnie wzmocnieniem i okresem krytycznym. Jeśli porównać funkcję opisującą przekaźnika z funkcją opisująca idealnego przekaźnika, jak pokazane na rys (6) histereza powoduje błąd w określeniu punktu krytycznego na krzywej Nyquista.

Rys. 6. Przesunięcie punktu krytycznego przy wprowadzeniu histerezy
Dlatego ważne jest by histerezę stosować wyłącznie wtedy, kiedy jest ona niezbędna, a jej poziom nie powinien być dużo większy niż poziom szumów .
Dr inż. E. Żak
Wykład
TEORIA STEROWANIA - P. A.
7
Wyszukiwarka