1. Zasady dynamiki

Prawa ruchu zostały sformułowane przez Izaaka Newtona i przedstawione w 1686 roku w dziele
"Philosophiae naturalis principia mathematica"
w postaci trzech zasad dynamiki.
Zasady te omówimy teraz bardziej szczegółowo.
Fot.3.2. Na fotografii - Issaac Newton (1642 - 1727) - figura w gabinecie figur woskowych Mme Tussaud w Lonndynie (WiŻ, 5/1977,s.28)
Pierwsza zasada dynamiki
Zapiszmy pierwsza zasadę dynamiki w sposób podobny do oryginalnego sformułowania Newtona. Pierwsza zasada dynamiki
Jeżeli na ciało nie są wywierane siły (lub siły działające się równoważą) to ciało to pozostaje w stanie spoczynku lub ruchu jednostajnego, prostoliniowego
Zasadniczą wartością pierwszej zasady dynamiki jest wprowadzenie równoważności stanu spoczynku i stanu ruchu jednostajnego prostoliniowego. Układy, w których pierwsza zasada dynamiki jest spełniona, nazywamy układami inercjalnymi; układy, w których spełniona nie jest - układami nieinercjalnymi. |
Rozpatrzmy to na przykładzie ruchu pociągów. Kiedy siedzimy w przedziale wagonu jadącego pociągu, układem nieruchomym jest dla nas wagon, bo względem nas się nie porusza. Kiedy stoimy na peronie, układem nieruchomym jest stacja kolejowa. Oba te układy odniesienia są jednakowo dobre do badania stanu ruchu innych przedmiotów, jeśli tylko w czasie prowadzenia obserwacji prędkość pociągu pozostaje stała co do wartości i kierunku. Pierwsza zasada dynamiki mówi, że kiedy pociąg zmienia stan swego ruchu, to musiała zostać wywarta na niego jakaś siła - w przeciwnym wypadku jego stan ruchu (lub bezruchu) pozostawałby bez zmian.
Sytuacja jest zasadniczo inna, kiedy pociąg nasz rusza lub zatrzymuje się - kiedy zmienia wartość lub kierunek swej prędkości. Znajdując się w takim pociągu nie jesteśmy w stanie wypowiadać się o ruchu innych obiektów (pociągów), bo nie wiemy czy to nasz, czy obserwowany przez nas pociąg zmienia stan swego ruchu. Układ taki nie jest dobrym układem odniesienia i jest w sprzeczności z pierwsza zasadą dynamiki.
Jadący pociąg może być układem inercjalnym ale tylko wtedy gdy wektor jego prędkości zachowuje stałą wartość. Zauważmy, że kiedy znany jest jeden układ inercjalny, to znanych jest ich nieskończenie wiele. Każdy bowiem układ poruszający się względem układu inercjalnego z dowolną ale stałą co do wartości i kierunku prędkością jest też układem inercjalnym. Pierwsza zasada dynamiki stanowi wiec definicję układu inercjalnego.
Masa i środek masy
Dla sformułowania drugiej zasady dynamiki konieczne jest wprowadzenie pojęcia masy.
Newton określił masę jako miarę ilości materii uważając tę jej właściwość za niezależną od stanu ruchu obiektów materialnych.
Jednostkę masy (kilogram, kg) wprowadziliśmy już. Zdefiniowaliśmy też pojęcie punktu materialnego. Teraz, każdemu obiektowi materialnemu przypiszemy masę |
Kiedy interesuje nas ruch układu wielu punktów materialnych, wprowadzamy pojęcie środka masy. Wektor położenia środka masy dla układu
punktów związany jest z masami
oraz promieniami wodzącymi
wszystkich punktów wchodzących w skład układu wzorem
|
gdzie |
|
(3.1) |
jest masą całego układu.
Kiedy rozpatrujemy ruch obiektu o ciągłym rozkładzie masy, określamy położenie jego środka masy podobnie jak dla układu punktów materialnych, ale sumowanie zastępujemy całkowaniem, wykorzystując znane z matematyki określenie całki oznaczonej.
|
gdzie |
|
(3.2) |
Wprowadzoną tu wielkość
|
(3.3) |
będącą stosunkiem elementu masy ciała
do elementu jego objętości
, przy
dążącym do zera, nazywamy gęstością masy ciała. Gęstość średnia wyraża związek pomiędzy całkowitą masą oraz rozmiarami ciała, wyrażonymi przez jego objętość,
. Jednostką gęstości jest stosunek jednostki masy do jednostki objętości, czyli kg/m3 . Często stosowaną jednostką jest także g/cm3.
|
(3.4) |
Jeśli ciało ma strukturę jednorodną, to jego gęstość w każdym miejscu jest taka sama i równa jego gęstości średniej.
Wektor pędu
Dla ilościowego opisu ruchu ciała o danej masie wprowadza się pojęcie wektora pędu zdefiniowanego jako iloczyn masy ciała i wektora jego prędkości. Pęd jest więc także wektorem, a jego kierunek zgodny jest z kierunkiem wektora prędkości.
(3.5)
|
Pęd układu punktów materialnych stanowi wektorową sumę pędów wszystkich punktów wchodzących w jego skład
|
(3.6) |
Pęd układu może być wyrażony przez pęd jego środka masy. Różniczkując bowiem lewy z wzorów (3,1) względem czasu - otrzymujemy
|
(3.7) |
gdzie przy różniczkowaniu skorzystaliśmy z założenia, że masa zachowuje wartość stałą w czasie ruchu. Pochodne wektorów wodzących względem czasu oznaczyliśmy następnie symbolami prędkości.
Wzór (3,7) można teraz przepisać wyrażając pędu układu punktów materialnych poprzez pęd środka masy
|
(3.8) |
Wzór (3,8) umożliwia wyrażenie prędkości środka masy układu poprzez prędkości i masy punktów materialnych wchodzących w jego skład
|
(3.9) |
Druga zasada dynamiki
Kiedy ciało jest pod działaniem sił nie równoważących się wzajemnie, to zgodnie z pierwszą zasadą dynamiki jego stan spoczynku lub ruchu jednostajnego prostoliniowego ulega zmianie - zmienia się wektor jego prędkości. Intuicyjnie wyczuwamy, że zmiana prędkości będzie tym większa, im większa siła będzie na ciało działać oraz, że kierunek zmiany prędkości będzie zgodny z kierunkiem działania siły. Z doświadczenia wiemy też, że większą siłę trzeba przykładać do ciał o większej masie niż o mniejszej, by osiągnąć tą samą zmianę prędkości.
Druga zasady dynamiki wyraża związek pomiędzy zmianą w czasie pędu ciała, a siłą pod wpływem której zmiana ta zachodzi. Druga zasada dynamiki
Zmiana pędu ciała jest proporcjonalna do wartości działającej na to ciało siły i zachodzi wzdłuż kierunku jej działania.
Zmianę pędu w czasie wyrażamy jako pochodną pędu względem czasu otrzymując wzór wyrażający ilościowo drugą zasadę dynamiki
(3.10)
|
Pochodna pędu względem czasu oznacza szybkość zmiany pędu. Możemy wiec drugą zasadę dynamiki sformułować także następująco:
Druga zasada dynamiki |
Szybkość zmiany pędu ciała równa jest wpadkowej sile działającej na to ciało. |
W ten sposób druga zasada dynamiki daje nam ilościowe określenie siły.
Jeśli przyjmiemy, że masa ciała podczas ruchu pozostaje stała, to równanie (2) możemy przepisać w postaci
|
(3.10a) |
gdzie
jest wektorem przyspieszenia ciała.
Druga zasada dynamiki może więc być także sformułowana inaczej. Druga zasada dynamiki
Iloczyn masy ciała przez jego przyspieszenie równy jest sile działającej na to ciało.
Założenie o stałości masy nie zawsze jest jednak spełnione. Pierwsze sformułowania drugiej zasady dynamiki są więc ogólniejsze od tego ostatniego. |
W przypadku układu punktów materialnych możemy zapisać drugą zasadę dynamiki do każdego z punktów oddzielnie, a następnie utworzyć sumę takich równań otrzymując
|
(3.11) |
Z drugiej strony, poprzez zróżniczkowanie stronami względem czasu wyrażenia (3,8) możemy otrzymać zależność
|
(3.12) |
Z wzorów (3,11) i (3,12) wynika, że
|
(3.13) |
Wzór ten zawiera bardzo ważną informację pokazując, że środek masy układu punktów materialnych porusza się tak, jakby działała na niego wypadkowa wszystkich sił działających na poszczególne punkty materialne układu. Sformułowanie to można jeszcze doprecyzować, ale w tym celu musimy zapoznać się z trzecią zasadą dynamiki.
Masa bezwładna i ciężar ciała
Zapiszmy inaczej wzór (3.10a). Kiedy na ciało o masie
działamy siłą
, nadajemy mu przyspieszenie
|
(3.14) |
Przyspieszenie jest więc proporcjonalne do działającej na ciało siły, zaś współczynnikiem proporcjonalności jest odwrotność masy ciała. Oznacza to, że im większa jest masa ciała (mianownik ułamka) tym większej musimy użyć siły (licznik) by przyspieszenie ciała mogło pozostać bez zmian. Mówimy, że masa jest miarą bezwładności ciała czyli "oporu" jaki ciało stawia sile, która zmienia stan jego ruchu. To właśnie dlatego konstruktorzy samochodów starają się zmniejszać ich masę, by uzyskać większe przyspieszenia przy tej samej mocy silnika, to dlatego więcej siły musimy przykładać otwierając masywne drzwi, choć otwierając - wcale ich nie podnosimy, a jedynie obracamy.
Masa i ciężar ciała to nie to samo. Masa, która jest własnością danego ciała zwana jest też masą bezwładną w odróżnieniu od ciężaru ciała, który jest różny na Ziemi, na Księżycu lub w statku kosmicznym. Masa bezwładna jest współczynnikiem proporcjonalności w równaniu (3.10a). Ciężar ciała będący siłą jaka działa na ciało wskutek przyciągania grawitacyjnego, jest proporcjonalny do jego masy bezwładnej. Ciężar ciała możemy wyrazić za pomocą równania (3.10a) jako
(3.15)
gdzie ciężar
Jednostką siły w układzie SI jest niuton (N). Jest to siła, która masie równej jednej jednostce masy (kilogram) nadaje przyspieszenie równe jednej jednostce przyspieszenia (1 m/s2); |
Przyspieszenie
zwane jest przyspieszeniem ziemskim i nie zależy od własności spadających przedmiotów, ale od masy Ziemi i odległości danego ciała od środka jej masy. Dlatego też inna jest wartość tego przyspieszenia na biegunie, inna na równiku, bowiem Ziemia nie jest idealną kulą; inna jest także nad powierzchnią Ziemi. Oczywiście, można też podobnie zdefiniować przyspieszenie na Księżycu, Marsie itd.
Domowe Laboratorium Fizyczne |
||
Na zaczepionej u góry nici zawieszony jest arbuz. U dołu przymocowana jest taka sama druga nić. )===>>> |
|
Kasia wykonuje doświadczenie. Będzie ciągnąć za nić zaczepioną u dołu. |
|
||
Odpowiedz - która nić, dolna czy górna, zerwie się kiedy Kasia pociągnie szybko, a która - kiedy będzie ciągnąć powoli. Uzasadnij swoją odpowiedź. Teraz zobacz wynik doświadczenia. |
||
Druga zasada dynamiki stanowi fundament całej fizyki klasycznej. W niezwykle prostej postaci wzoru (3.2) zawarte są prawa ruchu obiektów materialnych poczynając od przykładowego wazonu spadającego z szafy, a kończąc na ruchu samolotów, rakiet i ciał niebieskich. Zasada ta wyznacza związek pomiędzy przyczyną (siła) i skutkiem jej działania (przyspieszenie) stanowiąc podstawę deterministycznego rozumienia praw fizyki wyrażanego przez tzw. zasadę przyczynowości. Zgodnie z tą zasadą znajomość warunków początkowych (położeń i prędkości ciał w danej chwili czasu) oraz działających na te ciała sił wyznacza jednoznacznie stan ich ruchu w dowolnej chwili czasu. Zakres stosowalności drugiej zasady dynamiki wyznaczony został dopiero w początkach XX-go wieku poprzez mechanikę relatywistyczna i kwantową. Zasada ta jest jednak szczególnym przypadkiem obu tych teorii fizycznych.
Trzecia zasada dynamiki
Trzecia zasada dynamiki
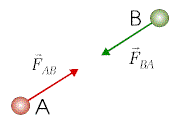
Oddziaływania wzajemne dwóch ciał są zawsze równe co do wartości ale przeciwnie skierowane.
Kiedy więc ciało A (patrz, rysunek) działa na ciało B daną siłą
(3.16)
Jeśli nazwiemy siłę pochodzącą od jednego ciała - siłą akcji, a pochodzącą od drugiego - siłą reakcji, to trzecią zasadę dynamiki możemy sformułować inaczej: Każdej akcji towarzyszy zawsze równa co do wartości lecz przeciwnie skierowana reakcja.
|
Widzimy więc, że siły zawsze występują parami. (uświadomił nam to Newton w trzeciej zasadzie dynamiki), ale są przyłożone do różnych ciał. Zwróćmy uwagę, że gdyby były przyłożone do jednego ciała, to znosiłyby się i w naszym świecie nie byłoby ruchów zmiennych.
|
Fot.3.3. Przeciąganie liny jest typowym przykładem akcji i reakcji. (WiŻ, 6/2000,s.57) |
Zastosujmy trzecią zasadę dynamiki do układu punktów materialnych. Przyjmijmy, że na każdy z punktów działają różnorodne siły pochodzące od innych punktów oraz z zewnątrz i zapiszmy dla i-go punktu, reprezentującego dowolny punkt układu, drugą zasadę dynamiki w postaci
|
(3.17) |
gdzie górnym indeksem (w) oznaczyliśmy siły pochodzące od innych punktów układu, a indeksem (z) siły zewnętrzne działające na dany punkt. Sumując obustronnie wyrażenia (3,17) dla wszystkich punktów układu otrzymamy
|
(3.18) |
Zauważmy jednak, że zgodnie z trzecią zasadą dynamiki, jeśli jeden punkt układu oddziałuje na drugi, to drugi działa na pierwszy z tą samą siłą, ale przeciwnie skierowaną. Suma sił działających na i-ty punkt pochodzi od pozostałych (N-1) punktów układu. Kiedy zsumujemy te siły, to każdej ze składowych sił będzie odpowiadać inna - przeciwnie skierowana. Suma wszystkich sił wewnętrznych wyniesie więc zero.
Teraz możemy doprecyzować wzór (3,11) eliminując z niego składową związaną z siłami wewnętrznymi.
|
(3.19) |
Wzór (3,13) możemy teraz przepisać w postaci
|
(3.20) |
Sens fizyczny tego wzoru możemy sformułować w postaci ważnego stwierdzenia.
Środek masy układu punktów materialnych porusza się tak, jak poruszałby się punkt materialny gdyby działała na niego wypadkowa siła
wszystkich zewnętrznych sił działających na wszystkie punkty układu.
Sformułowanie to odnosi się także i do ciała sztywnego, które możemy traktować jako sumę nieskończonej liczby punktów materialnych. Wzór ten stanowi uogólnienie drugiej zasady dynamiki na układ punktów materialnych i ciała sztywne.
Wyszukiwarka