POLITECHNIKA LUBELSKA
WYDZIAŁ ELEKTRYCZNY
LABORATORIUM AUTOMATYKI
Sprawozdanie z ćwiczenia 10
Regulacja ekstremalna
|
Tomasz Giżewski Tomasz Kołodziński Klaudiusz Mikulski |
Data wykonania ćwiczenia: 7,05,96
Ocena:............................. |
1. Przebiegi sygnałów w układzie z inercjią.
2. Przebiegi sygnałów w układzie bez inercji:
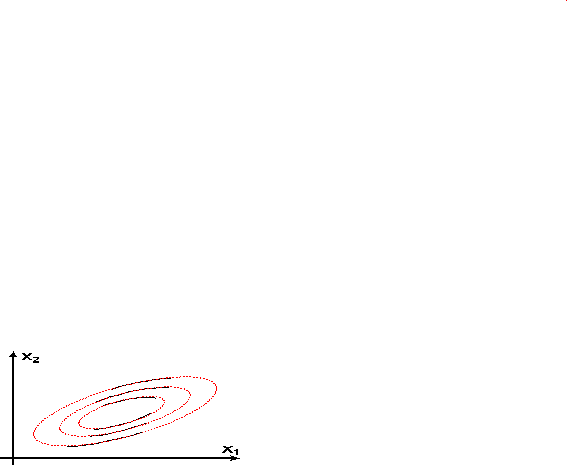
4. Trajektorie na płaszczyźnie x1, x2, dla Q=const.
Wnioski:
Analiza przebiegu sygnałów pokazuje przesunięcie wartości Q w czasie w układzie z inercją, zaś dla układu bez inercji przesunięcie takie nie występuje.
Porównując te układy zauważyć można większe straty na przeszukiwanie ekstremum w układzie z inercją.
Pełnych trajektorii Q=const na płaszczyźnie x1, x2, nie uzyskaliśmy ze względu na mały zakres zmian sygnałów sterujących. Na rejestratorze otrzymywaliśmy niepełne elipsy, ewentualnie figury zbliżone do prostokątów.
Wyszukiwarka