30
Podstawy
Elektronika dla Wszystkich
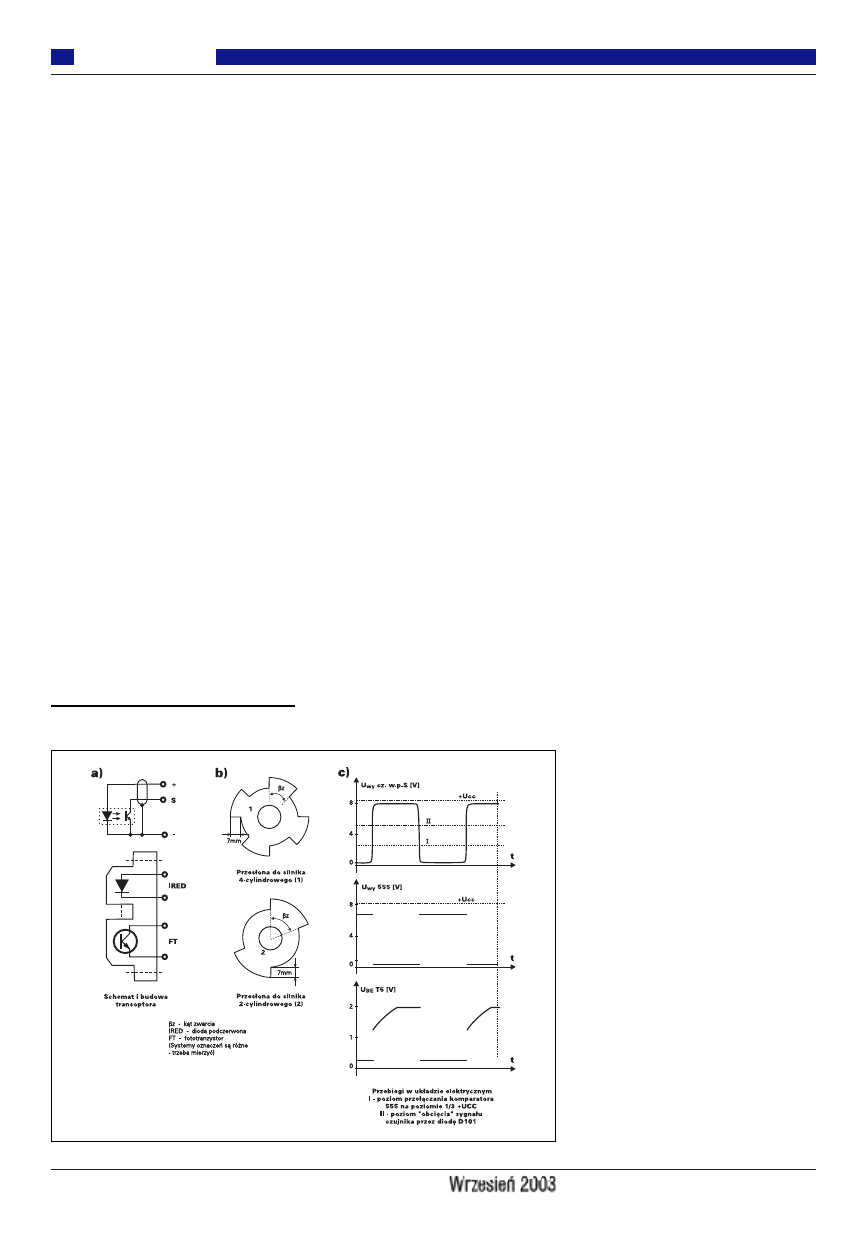
Czujnik optoelektroniczny
Jest to transoptor dioda-tranzystor, ale o bu-
dowie widełkowej, umożliwiającej przery-
wanie toru świetlnego przez przesłonę obro-
tową umieszczoną na wałku aparatu zapłono-
wego. Przesłona ustala kąt zwarcia
βz, a tak-
że synchronizuje wystąpienie iskry w odpo-
wiednim położeniu wału korbowego.
W układzie tu opisanym, przepływ prądu Im
następuje wtedy, gdy przesłona jest obecna
w szczelinie transoptora. Możliwa jest także
sytuacja odwrotna.
Schemat czujnika i przebiegi w układzie
są podane na rysunku 8. Podstawą prawidło-
wej pracy czujnika jest wprowadzenie w stan
nasycenia fototranzystora przy prądzie diody
świecącej chociaż połowę mniejszym od zna-
mionowego, a ustalanego przez rezystor
R101. Najlepiej, jeśli sprawdzimy, przy ja-
kiej wartości rezystora R101 (R201) zaczyna
się nasycenie fototranzystora. W tym celu za-
miast R101 dołączamy rezystor nastawny
4,7k
Ω i powoli zmieniamy rezystancję od
4,7k
Ω do 470Ω. Gwałtowny spadek napięcia
KE na fototranzystorze sygnalizuje wystą-
pienie nasycenia. Mierzymy wtedy wartość
rezystora nastawnego i wlutowujemy połowę
mniejszy, ale nie niższy od 470
Ω (15mA).
Jeśli wypadnie sporo mniejszy, to oznacza,
że ten typ transoptora nie nadaje się i szuka-
my innego typu o większej czułości. W skle-
pach sprzedawcy na ogół niewiele wiedzą
o parametrach transoptorów. Ja mogę podać
typy, które stosowałem i polecam, a są to:
TCST2000, TCST1103, TCST2203, IS02
a także elementy pojedyncze o średnicy
3mm, z których można zbudować transoptor
bardzo dobrej jakości, tj. IRED TEMT1209,
FT-SFH309-6. Elementy optoelektroniczne
(aby zidentyfikować) trzeba wiedzieć jak
mierzyć, najlepiej omomierzem analogo-
wym. Dioda podczerwona przy pomiarze re-
zystancji zachowuje się jak zwykła dioda
krzemowa, ale z większą rezystancją w kie-
runku przewodzenia. Natomiast fototranzy-
stor bardzo reaguje zmniejszeniem rezystan-
cji, jeśli wystawimy go na światło (np. odsła-
niamy ręką) i będzie dołączony plus omo-
mierza na kolektor. Jeśli dołączymy minus
omomierza do kolektora, to reakcja na świa-
tło będzie minimalna.
Przy projektowaniu przesłony, oprócz do-
brania średnicy zewnętrznej i wewnętrznej,
tak aby zmieściła się w aparacie przy zamon-
towanym transoptorze, musimy ustalić opty-
malny kąt zwarcia z do wybranej cewki za-
płonowej. Ponieważ nasz układ ma być jak
najbardziej uniwersalny, polecam zastosowa-
nie cewki 4240 (lub101). Jest to cewka uni-
wersalna o rezystancji 1,5
Ω/9,5mH i może
pracować w układzie bezrozdzielaczowym
we fiacie 126p, z modułem sterowanym
przerywaczem, jak i czujnikiem bezstyko-
wym. Może też pracować we fiacie 125 lub
w polonezie, tworząc układ podwójny tj. dwa
czujniki w odległości kątowej 90
o
, dwa mo-
duły i dwie cewki zapłonowe, gdzie każda
cewka obsługuje dwa cylindry (1-4 i 2-3). Je-
śli cewka będzie połączona w układzie z roz-
dzielaczem zapłonu, to jeden biegun wyso-
kiego napięcia trzeba połączyć z masą lub
plusem zasilania. Zalecany prąd Im cewki
4240 o wartości 4,5A i kącie zwarcia 60
o
bę-
dzie zachowany do ok. 4500 obr./min. Przy
5000 obr. będzie około 4,2A a przy 6000 obr.
około 3,7A, co w zupełności wystarczy do
prawidłowej pracy silnika, gdyż prądowi
3,7A odpowiada ok. 26kV wysokiego napię-
cia. Pomiar wysokiego napięcia na oscylo-
skopie w laboratorium ZELMOT-u wykazał,
że przy Im=4,5A wysokie napięcia wynosiło
32kV przy obciążeniu 50pF. Jeśli zdecyduje-
my się na cewkę 4226, to trzeba ustalić inny
kąt zwarcia. Obserwacja narastania prądu na
oscyloskopie wykazuje, że jeśli Im=5A osią-
gany jest w ciągu 2,5ms (przy +Uz=14V),
przy założeniu, że prąd taki nie powinien
spadać do 5000 obr./min., a aparat zapłono-
wy obraca się w tym czasie o 90
o
w ciągu
6ms, to kąt zwarcia wystarczy 37,5
o
. Z kolei
obliczenie energii wyładowania wykazuje, że
oby otrzymać ją niemniejszą niż z cewką
4240, należy prąd Im zwiększyć do 5,3-5,5A,
a to wskazuje, że kąt z trzeba zwiększyć do
ok. 45
o
, a wtedy spadek Im zacznie się od ok.
5500 obr/min., co w zupełności wystarczy.
Forsowanie pełnego prądu Im do maksymal-
nej prędkości obrotowej nie jest konieczne,
bo i tak mało jeździmy z pełną szybkością,
a spadek wysokiego napięcia o kilka procent
nie ma znaczenia dla nagrzanego silnika,
podczas gdy w układzie klasycznym spadek
ten wynosi ok. 2,5 raza. Od wartości kąta
zwarcia, rezystancji cewki oraz liczby cylin-
drów zależą straty cieplne (głównie w tranzy-
storze mocy, jeśli cewka jest „elektronicz-
na”). I tak: jeśli cewka jest klasyczna, to ra-
diator jest zbędny dla tranzystora w obudowie
T03 lub niewielki dla obudowy TO218 czy
220, jeśli cewka uniwersalna ok. 1,5
Ω i silnik
2-cylindrowy, to jest potrzebny radiator o po-
wierzchni 70-80 cm
2
z blachy Al. gr. 2 mm,
jeśli cewka „elektroniczna” 0,6-0,8
Ω i βz 45
o
oraz silnik 4-cylindrowy, to potrzebny radia-
tor żebrowany o masie ok. 200g lub obudowa
aluminiowa o podobnej wadze, ale wtedy
tranzystor mocy należy izolować, gdyż obu-
dowa powinna być połączona z masą. Szcze-
gólnie duże straty występują przy małych
prędkościach obrotowych, bo kąt zwarcia jest
stały i wielokrotnie za duży do osiągnięcia
przez cewkę prądu Im. Tu przydałby się
układ elektroniczny, który zmieniałby
Rys. 8 Elementy czujnika optoelek-
tronicznego
Samochodowe urządzenia zapłonowe
część 2
automatycznie kąt zwarcia w za-
leżności od prędkości obrotowej.
A może ktoś z Czytelników zbu-
dował taki układ lub wie, jak zro-
bić, aby kąt zwarcia był mały
przy mniejszych obrotach i wy-
dłużał się przy wzroście prędko-
ści obrotowej, nie zmieniając ką-
ta zapłonu, czyli momentu wystę-
powania iskry?
W każdym układzie zapłono-
wym występuje zjawisko opóź-
nienia iskry ze wzrostem prędko-
ści obrotowej. W układach elek-
tronicznych jest to suma opóźnie-
nia czujnika oraz modułu. Opóź-
nienie urządzenia zapłonowego
sterowanego czujnikiem optoe-
lektronicznym nie jest duże i wy-
nosi 1-1,5
o
OWK przy najwyższych obrotach
i ma charakter liniowy. A ponieważ opóźnie-
nie występujące w układzie klasycznym jest
podobne, nie ma potrzeby korekcji regulato-
ra odśrodkowego. Zupełnie inaczej jest
w układach z czujnikami magnetycznymi,
a ponieważ były one najbardziej rozpo-
wszechnione przed wdrożeniem systemów
wtryskowych, chciałbym przedstawić je nie-
co bliżej.
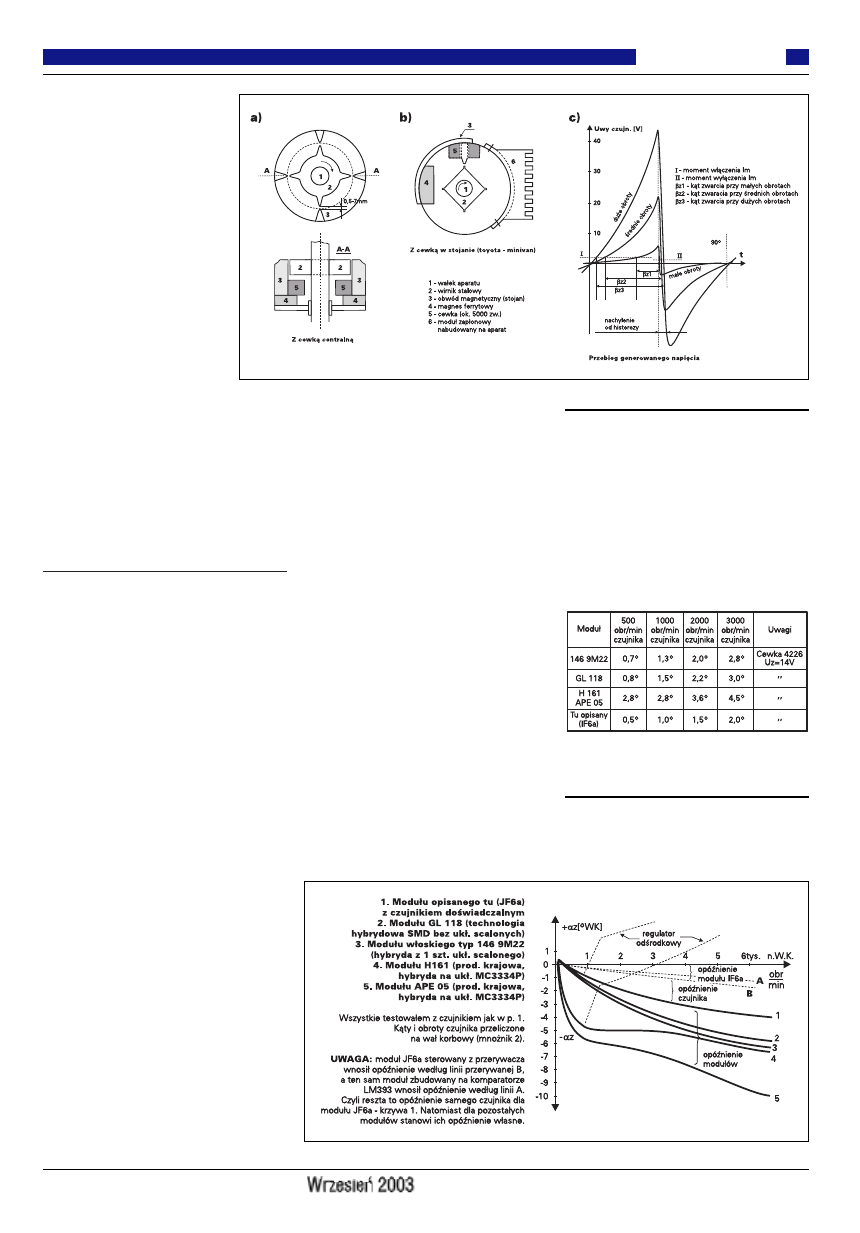
Układy z czujnikami
magnetoindukcyjnymi
Budowa czujnika oraz przebieg generowane-
go napięcia przedstawiony jest na rysunku 9.
Jest to przebieg zbliżony do „piły”, o warto-
ści amplitudy rosnącej ze wzrostem obrotów,
ale przyrost jest zbliżony do krzywej wykła-
dniczej. Przy najniższych obrotach rozrucho-
wych amplituda dodatnia osiąga 0,4-0,6V,
natomiast przy najwyższych obrotach docho-
dzi do 25-50V. Wartość zerowa sygnału wy-
stępuje w momencie, gdy zęby wirnika znaj-
dują się pośrodku między zębami stojana
(dotyczy to czujnika symetrycznego). Gdy
zęby wirnika zbliżają się do zębów stojana,
dodatnia półfala rośnie, osiągając najwyższą
wartość tuż przed zrównaniem się zębów.
W momencie zrównania się zębów następuje
gwałtowna zmiana biegunowości, a następ-
nie ujemna półfala osiąga najwyższą war-
tość, ale nieco mniejszą od dodatniej ze
względu na prądy wirowe i histerezę magne-
tyczną (rys. 9). Wirnik obraca się dalej, war-
tość ujemna napięcia zbliża się do zera i cykl
się powtarza. „Zmorą” czujnika magnetoin-
dukcyjnego jest duże opóźnienie sygnału
związane właśnie z prądami wirowymi i hi-
sterezą obwodów magnetycznych czujnika
wykonanych przeważnie z litej stali.
Opóźnienie również jest nieliniowe, osiąga-
jąc największe przyrosty przy mniejszych
obrotach, dochodzące do 2-3
o
przy 3000
obr./min. czujnika. Opóźnienie to jest kom-
pensowane odpowiednio większym kątem
regulatora odśrodkowego. I tu istotne jest,
aby sam moduł nie wprowadzał dużego
opóźnienia, co nie zawsze jest spełnione
(tabela 3, rysunek 10).
Do sterowania modułu wykorzystuje się
tylko dwa momenty napięcia czujnika:
1. Gdy napięcie rośnie od zera i osiągnie
0,3-0,4V, wtedy układ elektroniczny włą-
cza prąd cewki.
2. Gdy napięcie gwałtownie spada przy
zmianie biegunowości, prąd cewki (Im)
wyłącza się wtedy, kiedy napięcie spadnie
do 0,1-0,25V tuż przed osiągnięciem zera.
Czytelnicy już na pewno domyślają się, że
zbudowanie modułu do takiego czujnika nie
będzie trudne, wystarczy na wejściu kompa-
rator z histerezą, który będzie sterował stop-
niem mocy z ogranicznikiem prądu. Automa-
tyka samowyłączająca Im będzie zbędna, bo
nieruchomy czujnik nie wysterowuje modułu
i prąd Im nie płynie. Czy warto taki moduł
budować, skoro można kupić gotowe za oko-
ło 50zł? Ja myślę, że warto, choćby dlatego,
że najczęściej spotykane moduły firmowe są
zbudowane na bazie układu scalonego
MC3334P, który jest jednocześnie regulato-
rem kąta zwarcia. Kostka ta jest dość awaryj-
na, bo 99% modułów typu APE05, H161 by-
ło uszkodzonych właśnie z powodu tego
układu. Dodatkowo moduły te mają bardzo
duże opóźnienie z powodu niedopracowania
układu aplikacyjnego tej kostki, a konkretnie
rezystor wejściowy (równoległy do czujnika)
powinien mieć ponad 30k
Ω, aby moduł nie
wprowadzał tak dużego opóźnienia (rys. 10),
tymczasem rezystor napylany na ceramice
ma tylko 6-8k
Ω, co powoduje pobór więk-
szego prądu z czujnika i wzrost opóźnienia.
31
Podstawy
Elektronika dla Wszystkich
Rys. 9. Czujnik magnetoindukcyjny
Tabela 3 Opóźnienie niektórych
modułów wraz z czujnikiem
magnetoindukcyjnym
Rys. 10 Opóźnienie sygnału wnoszo-
ne przez czujnik magnetoinduk-
cyjny wraz z modułem zapłono-
wym
Na upartego rezystor ten można „wyskrobać”
i wlutować zwykły 30-33k
Ω bezpośrednio na
punkty podłączenia przewodów wejścio-
wych. Jeśli wykorzystamy lepszy moduł, to
ten oryginalny może służyć jako zapasowy,
co powinno być regułą, jeśli wyruszamy
w dalszą drogę. Teraz już przestałem się dzi-
wić, gdy słyszę rozmowy użytkowników,
że po zmianie układu klasycznego na elektro-
niczny (produkcji krajowej) samochód zrobił
się „mulasty” i więcej pali. Nic dziwnego,
skoro ma zamontowany „taki” moduł! Nowy
moduł można wykonać w obudowie modułu
uszkodzonego lub innej, mającej jednocze-
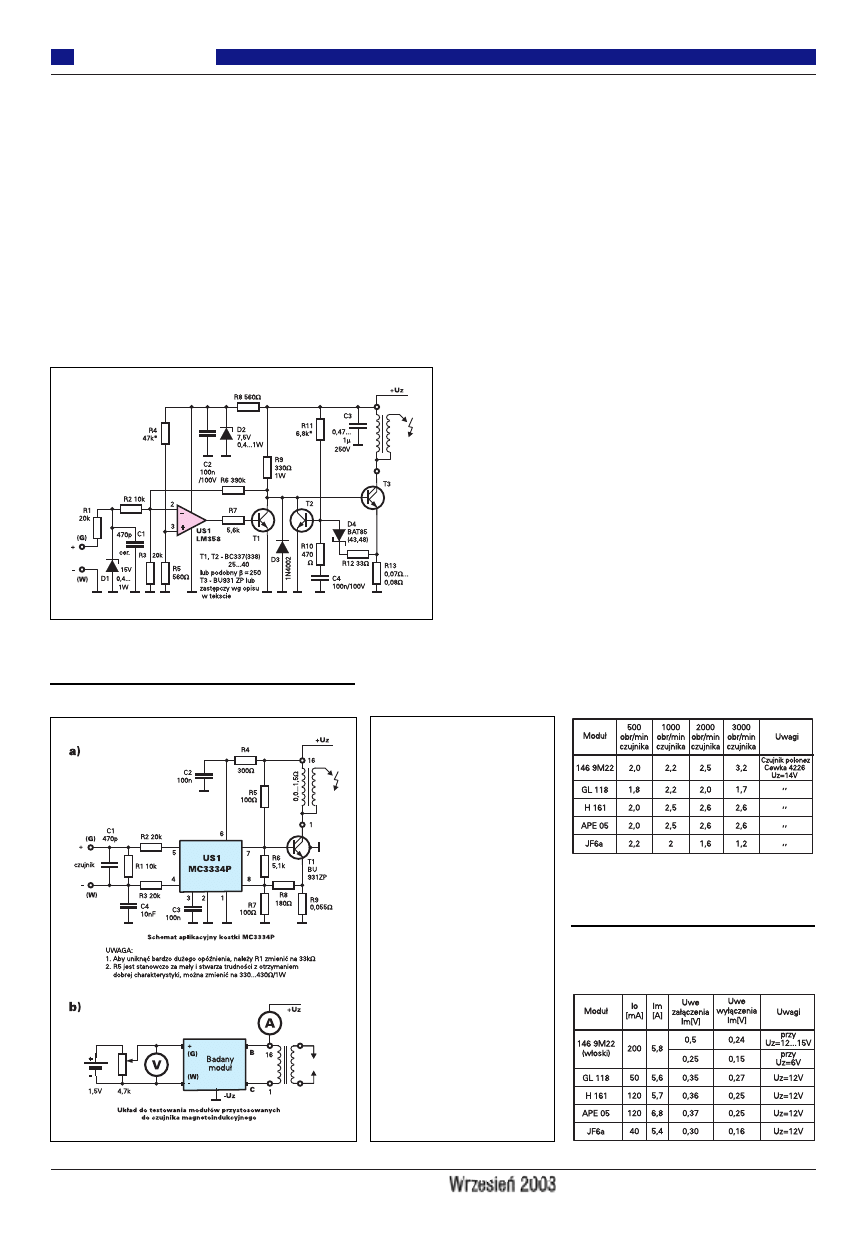
śnie cechy radiatora. Schemat jest przedsta-
wiony na rysunku 11, a zasada pracy jest na-
stępująca: gdy prędkość obrotowa czujnika
osiągnie ok. 15 obr./min. a dodatnia półfala
napięcia wejściowego (rosnącego) ok. 0,3V,
przez rezystor R1 i R2 zostaje wysterowany
komparator, ustawiony rezystorem R4 na ta-
ką właśnie czułość. Ponieważ napięcie wej-
ściowe podawane jest na wejście odwracają-
ce, to stan na wyjściu zmieni się na niski
(prawie 0 w kostce LM358) i zatkany zosta-
nie tranzystor T1. Wówczas przez R9 zostaje
wysterowany tranzystor mocy (darlington
BU931ZP) i popłynie prąd cewki zapłonowej
Im. Prąd ten płynie do momentu, gdy zęby
wirnika i stojana zrównają się i napięcie spa-
dnie do ok. 0,16V.
Wtedy komparator
się przełączy, na
wyjściu będzie stan
wysoki, tranzystor
T1 zostaje wystero-
wany przez rezystor
R7 i przechodząc
w nasycenie, bloku-
je tranzystor mocy.
Zanik prądu Im
oczywiście spowo-
duje wyładowanie
iskrowe. Wartość
histerezy można ko-
rygować rezysto-
rem R6, a czułość
R4. Ogranicznik
prądu był już opisy-
wany w poprzednim układzie, ale
tu może być też zastosowana pro-
stsza wersja bez diody Schott-
ky’ego. Kąt zwarcia przy małych obrotach
jest mniejszy, a ze wzrostem obrotów czas
włączenia cewki rośnie, zbliżając się do 50%
(rys. 9c), czyli do 45
o
w 90
o
kącie podziału.
Nietrudno odgadnąć, że cewka 4226 będzie
pasowała „w sam raz”. Zestrojenie modułu
przeprowadzamy w układzie jak na rysunku
12b. Zanim włączymy zasilanie, ustawiamy
rezystor nastawny na najniższe napięcie, naj-
lepiej na 0V. Włączamy zasilanie 12V, jeśli
jest akumulator to powinien być naładowany.
Amperomierz włączony w dodatni przewód
zasilający powinien wskazywać kilkadziesiąt
mA prądu spoczynkowego, zależnego głów-
nie od wartości rezystora R9. Zwiększamy
powoli napięcie wejściowe modułu, obser-
wując woltomierz. Po osiągnięciu napięcia
0,28-0,3V powinien popłynąć prąd Im wska-
zywany przez amperomierz włączony w do-
datni przewód zasilania. Dla cewki 4226
prąd ten powinien wynosić 5,2-5,6A i można
go dobrać rezystorem R11 lub R13. Pokręca-
my jeszcze rezystorem przy wejściu modułu
w celu uzyskania pełnego napięcia ogniwa,
a następnie obniżamy, obserwując ampero-
mierz, kiedy wyłączy się prąd cewki, a po-
winno to nastąpić w momencie, gdy napięcie
wejścia wynosi 0,15-0,16V. Z tego wynika,
że histereza wyniesie 0,3-0,16=0,14V i moż-
na ją zwiększać zmniejszając wartość rezy-
stora R6 i każdorazowo zestroić napięcie za-
łączenia modułu rezystorem R4. Na cewce
powinien być ustawiony iskiernik z drutu
z przerwą ok. 12 mm z gniazda wysokiego
napięcia do zacisku 16 (+). W momencie za-
niku prądu Im powinno występować „czyste”
wyładowanie iskrowe (bez „bzykania”).
32
Podstawy
Elektronika dla Wszystkich
Wykaz elementów modułu elektronicz-
nego do sterowania czujnikiem magne-
toindukcyjnym (patrz rysunek 11)
R1,R3 . . . . . . . . . . . . . . . . . . . . . . .20kΩ
R2 . . . . . . . . . . . . . . . . . . . . . . . . . .10kΩ
R4 . . . . . . . . . . . . . . . . .47kΩ (dobierany)
R5,R8 . . . . . . . . . . . . . . . . . . . . . . .560Ω
R6 . . . . . . . . . . . . . . . . . . . . . . . . .390kΩ
R7 . . . . . . . . . . . . . . . . . . . . . . . . .5,6kΩ
R9 . . . . . . . . . . . . . . . . . . . . . .330Ω/1W
R10 . . . . . . . . . . . . . . . . . . . . . . . .470Ω
R11 . . . . . . . . . . . . . . .6,8kΩ (dobierany)
R12 . . . . . . . . . . . . . . . . . . . . . . . . .33Ω
R13 . . . . . . . . . . . . . .ok. 0,075Ω drutowy
C1 . . . . . . . . . . . . . . . . . . . . . . . . .470pF
C2,C4 . . . . . . . . . . . . . . . . . .100nF/100V
C3 . . . . . . . . . . . . . . . .470nF...1µF/250V
US1 . . . . . . . . . . . . . . . . . . . . . . . .LM358
D1 . . . . . . . . . . . . . . . .DZ 15V/ 0,4W-1W
D2 . . . . . . . . . . . . . . . .DZ 7,5V/0,4W-1W
D3 . . . . . . . . . . . . .1N4002...7 lub BA157
D4 . . . . . . . . . . . . . . . . . .BAT 85 (43, 48)
T1,T2 BC337/25...40 lub podobny (β≥250)
T3 . . . . . . . . . . . . . . . . . . . . . . .BU931ZP
Dwużyłowy przewód ekranowany łączący
moduł z czujnikiem - z ekranem połączonym
z masą przy czujniku.
Rys. 11 Schemat modułu elektronicznego do
sterowania czujnikiem magnetoindukcyj-
nym
Rys. 12
Tabela 4 Prąd średni (w amperach)
pobierany przez moduły przy róż-
nych obrotach czujnika
Tabela 5 Parametry statyczne nie-
których najczęściej spotykanych
w kraju modułów
W taki sposób można sprawdzać inne fa-
bryczne moduły, przystosowane do czujnika
magnetoindukcyjnego. Sprawdzenie dyna-
miczne polega na dołączeniu czujnika i napę-
dzaniu np. wiertarką lub dołączeniu na wej-
ście napięcia przemiennego 5-8 V z transfor-
matorka małej mocy. Testy modułów róż-
nych typów przedstawiają tabele 3, 4, 5. Tu
również obowiązuje zasada, że nie dotykamy
zacisku cewki zapłonowej niedołączonego
do plusa zasilania, bo w momencie iskry jest
napięcie 400V.
Pozostaje jeszcze ustalenie biegunowości
czujnika, ale jest to sprawa umowna, ponie-
waż czujnik wytwarza napięcie przemienne
i ważne jest, aby dodatnia półfala występo-
wała przed zrównaniem zębów. Jeśli czujnik
jest podłączony do modułu, to ustawiamy go
tak, aby zęby wirnika i stojana zrównały się,
a następnie pokręcamy w dowolną stronę
o ok. 30
o
. Jeśli nie nastąpi wyładowanie
iskrowe, to połączenie jest prawidłowe
i oznaczamy zaciski czujnika zgodnie z ozna-
czeniami na module. Spotykane są różne sy-
stemy oznaczeń: G-W, A-B, K1-K2 oraz „+”
i „-”. Ustalenia biegunowości czujnika moż-
na też dokonać bez dołączania do modułu za-
płonowego, a za pomocą woltomierza analo-
gowego na zakresie 0,3 lub 1V. Tak jak po-
przednio ustawiamy zęby w jednej linii
i energicznie pokręcamy o ok. 30
o
w dowol-
ną stronę. Jeśli wskazówka wychyli się do ty-
łu, to plus czujnika będzie ten, gdzie dołączo-
ny jest plus miernika. Plus wejścia modułu
będzie tam, gdzie dołączony jest rezystor R1,
a minus połączony z masą, ale w modułach
firmowych minus czujnika nie zawsze jest
połączony z masą, a najczęściej na tzw. na-
pięciu odniesienia, wykorzystywanym do re-
gulacji kąta zwarcia w module. W module tu
opisanym nie ma regulacji kąta zwarcia,
gdyż nie ma takiej potrzeby, bowiem spadek
wysokiego napięcia występuje minimalnie
dopiero powyżej 5500 obr. silnika, a przy
okazji moduł pobiera średnio mniejszy prąd
niż moduły z regulacją z (patrz tabela 4).
Przy szukaniu niesprawności w układach
produkcji krajowej stwierdziłem, że często
pękają przewody tuż przy dołączeniu do
cewki czujnika, wystarczy wtedy dołączyć
omomierz i poruszać przewodami.
Dla zainteresowanych chciałbym jeszcze
podać schemat aplikacyjny kostki
MC3334P (rysunek 12a), często stosowanej
w modułach przeznaczonych do czujników
magnetoindukcyjnych.
Często spotkanym czujnikiem bezstyko-
wym jest scalony czujnik Halla, zawierający
hallotron oraz wzmacniacz z histerezą. Na-
pięcie wyjściowe ma kształt prostokątny
o wartościach skrajnych zbliżonych do
„szyn” zasilających, a opóźnienie duże, zbli-
żone do czujnika magnetoindukcyjnego.
W module oprócz typowego stopnia mocy
z ogranicznikiem prądu i automatyką samo-
wyłączania Im znajduje się człon zmniejsza-
jący kąt zwarcia przy małych obrotach.
Systemy z czujnikiem Halla spotykamy
w Ładach Samarach, Tawriach oraz nie-
których modelach Volkswagena. Ustawienia
zapłonu w samochodzie dokonujemy zgo-
dnie z zaleceniami fabrycznymi, ale jeśli ich
nie ma, to stosujemy następującą zasadę:
1. Ustawiamy kąt wstępny 10
o
przed ZZ dla
silników o stopniu sprężania
≥9, oraz
5-7
o
dla silników o stopniu sprężania
większym od 9.
2. W układzie stykowym lub stykowo-tran-
zystorowym przy podanym kącie przed
ZZ powinno następować przerwanie ob-
wodu styków. Można to sprawdzić omo-
mierzem lub żarówką włączoną w sze-
reg z przerywaczem lub zamiast cewki
zapłonowej w układzie stykowo-tranzy-
storowym. Jeśli są spore luzy mechani-
zmów w aparacie, lepsze będzie ustawie-
nie dynamiczne za pomocą lampy stro-
boskopowej.
3. W układzie z czujnikiem optoelektronicz-
nym przy podanym kącie przed ZZ, prze-
słona powinna w tym momencie „wycho-
dzić” z osi symetrii fotoelementów. Mo-
ment jest bardzo precyzyjny i najlepiej
ustawić włączając zamiast cewki zapłono-
wej dowolną żarówkę 12V lub dynamicz-
nie za pomocą lampy stroboskopowej.
4. Czujnik magnetoindukcyjny ustawiamy
(przez obrót aparatu) tak, aby przy poda-
nym kącie statycznym następowało zrów-
nanie się zębów wirnika i stojana.
We wszystkich układach z rozdzielaczem
zapłonu moment występowania iskry musi
być zgodny z położeniem palca rozdzielacza
odpowiedniego cylindra. Przy zauważeniu
dużych luzów skrętnych zazębienia wałka
aparatu, miarodajne powinno być ustawienie
go w pozycji cofniętej do oporu.
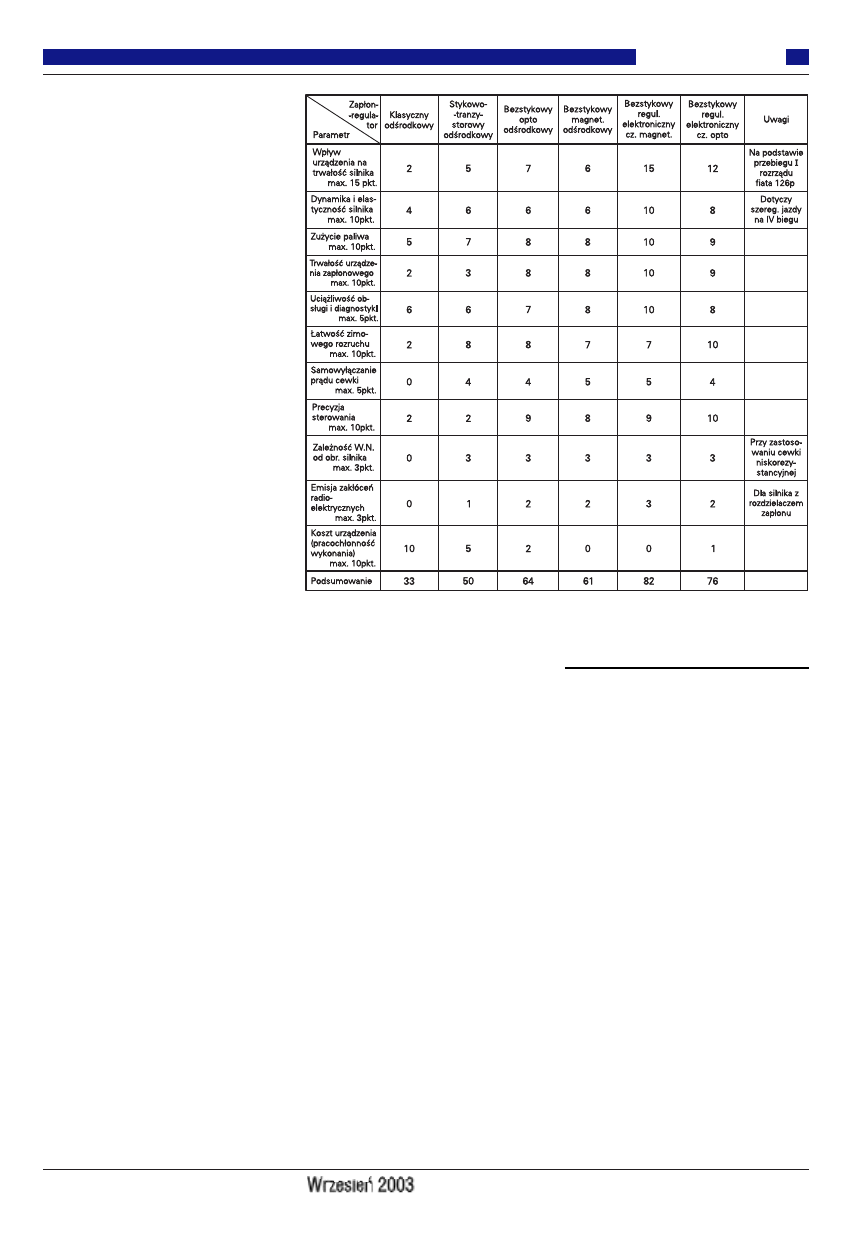
Na podstawie omówionych układów moż-
na ułożyć tabelę porównawczą (punktując
wg parametrów uznanych jako mniej lub bar-
dziej znaczące), patrz tabela 6.
Lepsze parametry silnika oraz mniejszy
zakres obsługi można osiągnąć budując urzą-
dzenie z elektronicznym regulatorem punktu
zapłonu. Mam opracowane i przetestowane
w kilkunastoletniej eksploatacji takie urzą-
dzenia. Gdybyście byli zainteresowani, pi-
szcie listy, a ja chętnie je opublikuję, oczywi-
ście z pomocą Redakcji EdW.
Piszcie również wtedy, gdy będziecie
mieli uwagi lub pytania dotyczące opisanego
tematu.
Stefan Roguski
33
Podstawy
Elektronika dla Wszystkich
Tabela 6 Porównanie różnych wersji
urządzeń zapłonowych według
wartości istotnych parametrów
Wyszukiwarka
Podobne podstrony:
edw 2003 08 s62 czI zapłon elektroniczny
edw 2003 09 s10
edw 2003 09 s58
edw 2003 05 s30
edw 2003 09 s50
edw 2003 09 s18
edw 2003 09 s27
edw 2003 08 s30
edw 2003 04 s30
edw 2003 09 s48
edw 2003 09 s45
edw 2003 09 s16
edw 2003 03 s30
edw 2003 09 s20
edw 2003 01 s30
edw 2003 11 s30
więcej podobnych podstron