
Dodatek B
1 Magistrala 1-Wire
Ciągle rosnąca liczba układów peryferyjnych podłączanych do mikroprocesorów zmusza
konstruktorów do opracowywania nowych interfejsów. Drugą przyczyną powstawania
nowych rozwiązań są ograniczenia patentowe obowiązujące dla już istniejących. Jednym
z takich przykładów jest magistrala 1-Wire opracowana przez firmę Dallas Semiconductors
(obecnie Maxim-Dallas). Oryginalność tego rozwiązania polega na wykorzystaniu jedynie
dwóch przewodów. Jeden z nich to dwukierunkowa linia transmisyjna, drugi zaś to przewód
odniesienia (masa). Większość układów peryferyjnych opracowanych również przez firmę
Dallas zwanych układami iButton, nie wymaga zasilania, czerpiąc całą energię
z transmitowanych sygnałów. Przykładem takich układów mogą być „pastylki identyfikujące”
DS1992 (Fot. 1).
Fot. 1. Układ iButton DS1992 oraz gniazdo-czytnik.
Zasadniczą częścią układu DS1992 jest pamięć ROM, w której na etapie produkcji zapisano
niepowtarzalny, 48-bitowy numer seryjny. W drugiej części układ posiada zapisywalną
pamięć typu NVRAM, umożliwiającą przechowywanie krótkich informacji. Pojemność tej
pamięci wynosi 1024 bity i podzielona jest na strony po 256 bitów każda.
Właściwości układów z serii DS199x sprawiają, że nadają się one np. do identyfikowania
posiadacza. Oczywiście numer seryjny zapisany w ROM każdego układu jest jawny, co jest
widoczne na fot. 1. i zmusza posiadacza do zabezpieczenia układu przed dostaniem się
w niepowołane ręce.
2 Protokół komunikacyjny magistrali 1-Wire.
Współpraca układów podłączonych do magistrali 1-Wire przebiega na zasadzie „master-
slave”, czyli jest zawsze jeden układ nadrzędny (master) i co najmniej jeden układ podrzędny
(slave). Transmisja odbywa się poprzez odpowiednio określone szczeliny czasowe (slots).
Wyróżnić można cztery rodzaje szczelin czasowych.
2.1 Szczelina inicjująca.
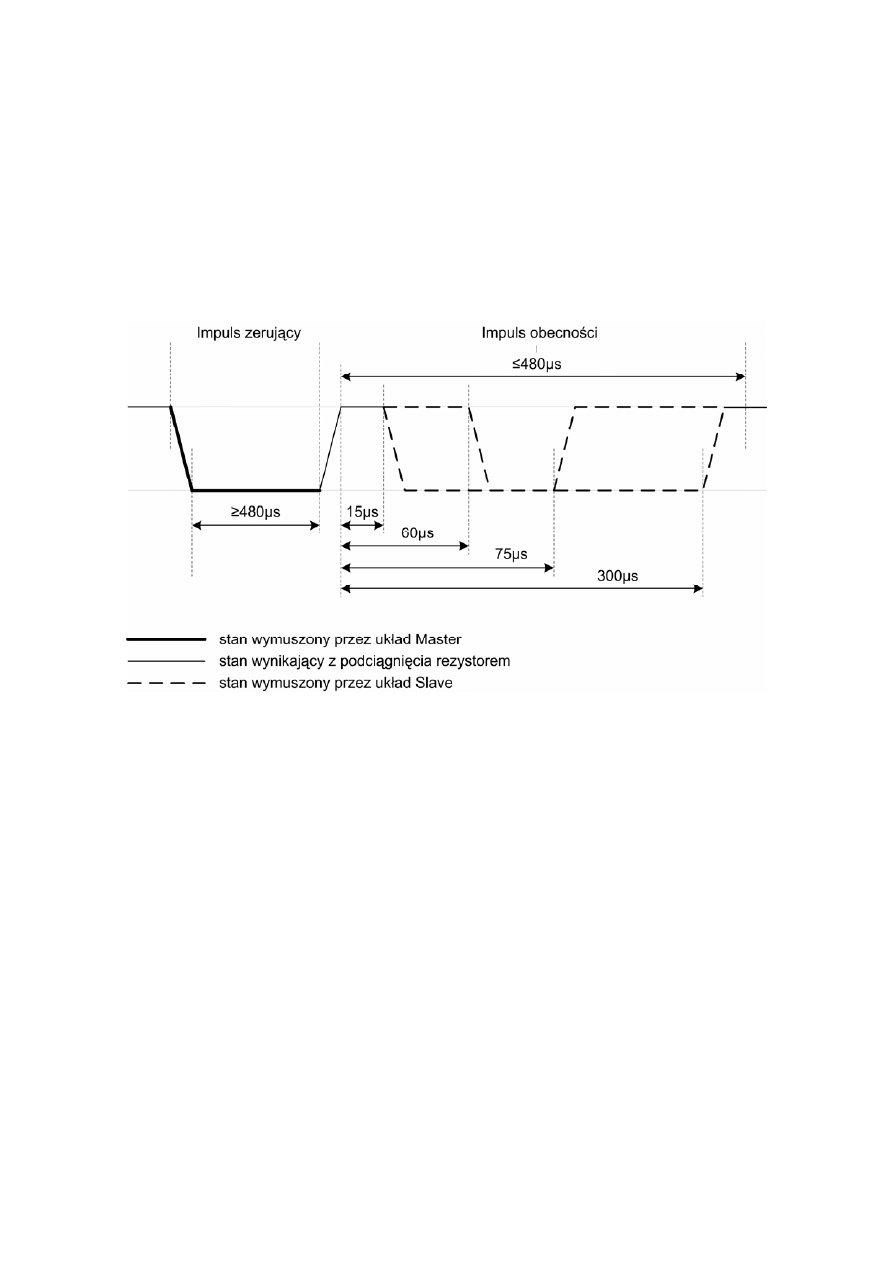
Pierwszą z nich jest szczelina inicjująca. W pierwszej fazie tej szczeliny, zwanej impulsem
zerującym, układ nadrzędny wystawia niski stan na linii transmisyjnej na czas nie krótszy niż
480µs. Następnie układ nadrzędny zwalnia linię poprzez ustawienie stanu wysokiego.
Po upływie kolejnych 60µs układy podrzędne powinny zgłosić swoją obecność przez
wystawienie stanu niskiego na linii. Stan ten powinien być utrzymywany przez co najmniej
15µs lecz nie więcej niż 240µs. Tę fazę nazywamy impulsem obecności i może ona trwać
maksymalnie 480µs. Odpowiednie przebiegi czasowe przedstawia rys. 1.
Rys. 1. Przebiegi czasowe na linii transmisyjnej podczas szczeliny inicjującej.
2.2 Szczelina zapisu „1”.
Ten typ szczeliny rozpoczyna się wystawieniem stanu niskiego na linię transmisyjną przez
układ nadrzędny. Czas trwania tego stanu musi wynosić co najmniej 1µs lecz mniej niż 15µs.
Następnie układ nadrzędny zwalnia linię dzięki czemu na linii pojawia się stan wysoki.
Począwszy od piętnastej mikrosekundy do sześćdziesiątej mikrosekundy układy podrzędne
mają czas na odczyt stanu linii (okno próbkowania - ang. sampling window). W tym czasie
stan linii nie powinien się zmieniac. Odpowiednie przebiegi przedstawia rys. 2.
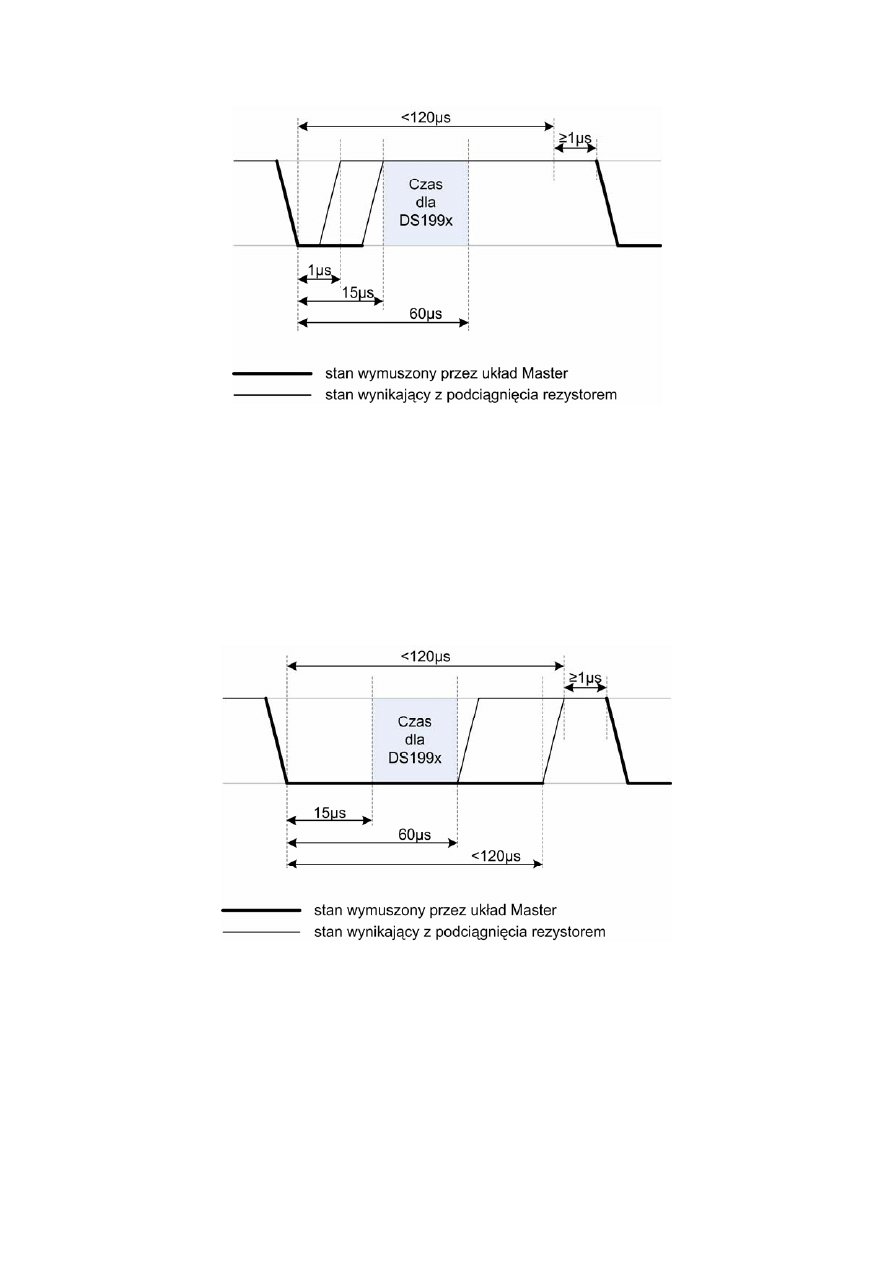
Rys. 2. Przebiegi czasowe na linii transmisyjnej podczas szczeliny zapisu „1”.
2.3 Szczelina zapisu „0”.
Podczas trwania tego typu szczeliny układ nadrzędny wystawia stan niski na linii
transmisyjnej i utrzymuje go przez co najmniej 60µs lecz krócej niż 120µs. Układy podrzędne
mogą odczytywać stan linii między piętnastą a sześćdziesiąta mikrosekundą trwania
szczeliny. Odpowiednie przebiegi przedstawia rys. 3.
Rys. 3. Przebiegi czasowe na linii transmisyjnej podczas szczeliny zapisu „0”.
2.4 Szczelina odczytu.
Szczelina czasowa tego typu rozpoczyna się wystawieniem przez układ nadrzędny stanu
niskiego na czas co najwyżej 1µs. Następnie układ nadrzędny zwalnia linię i przechodzi
w stan odczytu. Okno próbkowania stanu linii przez układ nadrzędny trwa do piętnastej
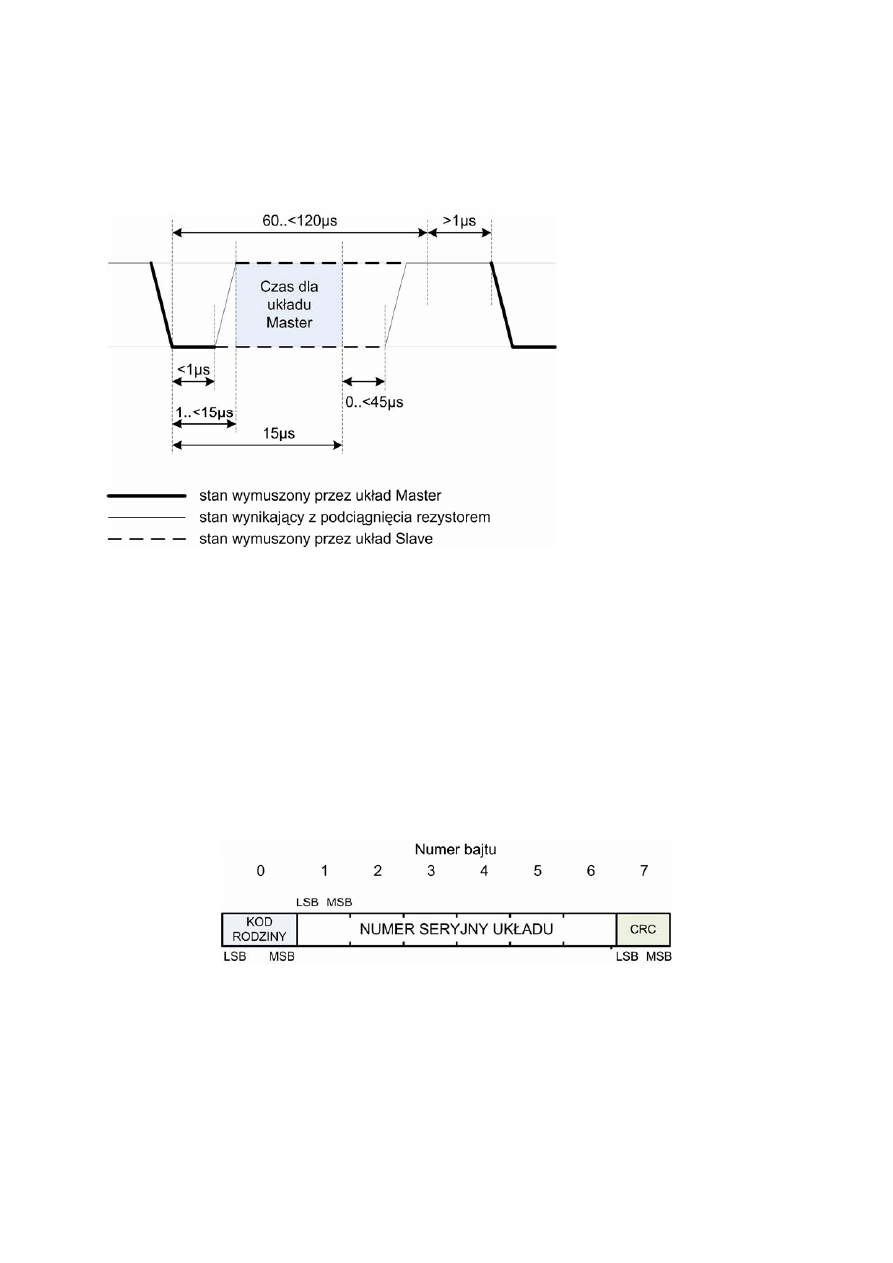
mikrosekundy trwania szczeliny. Układ podrzędny może utrzymywać stan linii nie dłużej niż
przez 45µs od momentu zakończenia okna próbkowania. Odpowiednie przebiegi przedstawia
rys. 4.
Rys. 4. Przebiegi czasowe na linii transmisyjnej podczas szczeliny odczytu.
Zapis lub odczyt danych po magistrali 1-Wire odbywa się przez złożenie odpowiednich
szczelin czasowych. Przykładowo aby odczytać numer seryjny układu DS199x należy
postępować zgodnie z następującym algorytmem:
• Układ nadrzędny wysyła szczelinę inicjującą.
• Jeżeli podczas szczeliny inicjującej układ podrzędny potwierdzi swoją obecność, to
układ nadrzędny przystępuje do wysłania rozkazu np. „czytaj ROM” (0x33).
• Następnie układ nadrzędny przechodzi do odczytywania danych z układu
podrzędnego, który wystawia kolejno 64 bity. Ich znaczenie obrazuje rys. 5.
Rys. 5. Znaczenie poszczególnych bajtów wystawianych przez układ podrzędny podczas
wykonywania rozkazu „czytaj ROM”.

3 Rozkazy obsługi pamięci ROM
Pierwszym etapem komunikacji systemu mikroprocesorowego (master) z układami iButton
(slave) jest wysłanie sygnału RESET i sprawdzenie, czy do linii są podłączone (wstawione
do czytników) jakieś układy iButton. Jeżeli jakieś układy zasygnalizują swoją obecność,
master wysyła jeden z czterech rozkazów obsługi ROM. Każdy rozkaz składa się z 8 bitów,
wysyłanych w linię kolejno, począwszy od najmłodszego. Układy DS1990 zawierają
wyłącznie pamięć ROM, a zatem nie wykorzystują rozkazów 55H ani CCH.
3.1 Czytaj ROM [33h]
Po wysłaniu tego rozkazu master powinien wykonać operacje odczytu kolejnych 64 bitów
(zawartość pamięci ROM układu iButton) wysyłanych przez slave'a kolejno, począwszy
od najmłodszego. W układach DS199x będą to kolejno:
• 8 bitowy kod rodziny urządzeń
• unikalny 48 bitowy numer urządzenia
• 8 bitowe słowo sumy kontrolnej (CRC).
Rozkazu tego można użyć wyłącznie w przypadku, gdy do linii dołączone jest tylko jedno
urządzenie – w przeciwnym wypadku wszystkie urządzenia będą się zgłaszać jednocześnie,
a na linii sygnałowej pojawi się iloczyn logiczny (wired-AND) stanów wyjściowych
poszczególnych urządzeń. Taką sytuację można wykryć przez porównanie odebranej
i wyliczonej sumy kontrolnej.
3.2 Wybierz układ [55h]
Po wysłaniu tego rozkazu, a następnie sekwencji 64 bitów zgodnej z zawartością pamięci
ROM, mamy możliwość wyboru określonego urządzenia spośród kilku dołączonych
jednocześnie do linii. Tylko to urządzenie, którego zawartość ROM jest zgodna z wysłaną
sekwencją, będzie odpowiadać na następne rozkazy. Wszystkie pozostałe układy przechodzą
w stan oczekiwania na sygnał RESET.
3.3 Pomiń identyfikację [CCh]
W przypadku pojedynczego urządzenia dołączonego do linii można użyć tego rozkazu
zamiast sekwencji odbioru zawartości pamięci ROM (po rozkazie 33h) lub jej wysyłania
(po rozkazie 55h).
3.4 Zidentyfikuj układy [F0h]
Po uruchomieniu systemu master nie ma informacji ile urządzeń jest dołączonych do linii, ani
jakie są ich kody identyfikacyjne. Rozkaz F0h umożliwia przeprowadzenie procesu
identyfikacji wszystkich urządzeń dołączonych do linii. Proces ten polega na powtarzaniu
przez master sekwencji trzech kolejnych kroków:
• wczytanie wartości bitu (wire-AND stanów wywołanych przez wszystkie dołączone i
aktywne urządzenia),
• wczytanie wartości komplementarnej tego bitu,
• wysłanie odpowiedniej wartości bitu. Urządzenia, dla których bit ten nie jest zgodny
z ich aktualnym bitem w pamięci ROM, przechodzą w stan WAIT. (czekania na
RESET).
Master wykonuje tę sekwencję dla wszystkich 64 bitów kodu identyfikacyjnego, uzyskując
w ten sposób kod jednego urządzenia. Następne przebiegi ( RESET + F0h) pozwalają
na identyfikację kolejnych urządzeń przez odpowiedni dobór wysyłanych bitów.
4 Realizacja interfejsu 1-Wire z wykorzystaniem
mikroprocesora ATMega128.
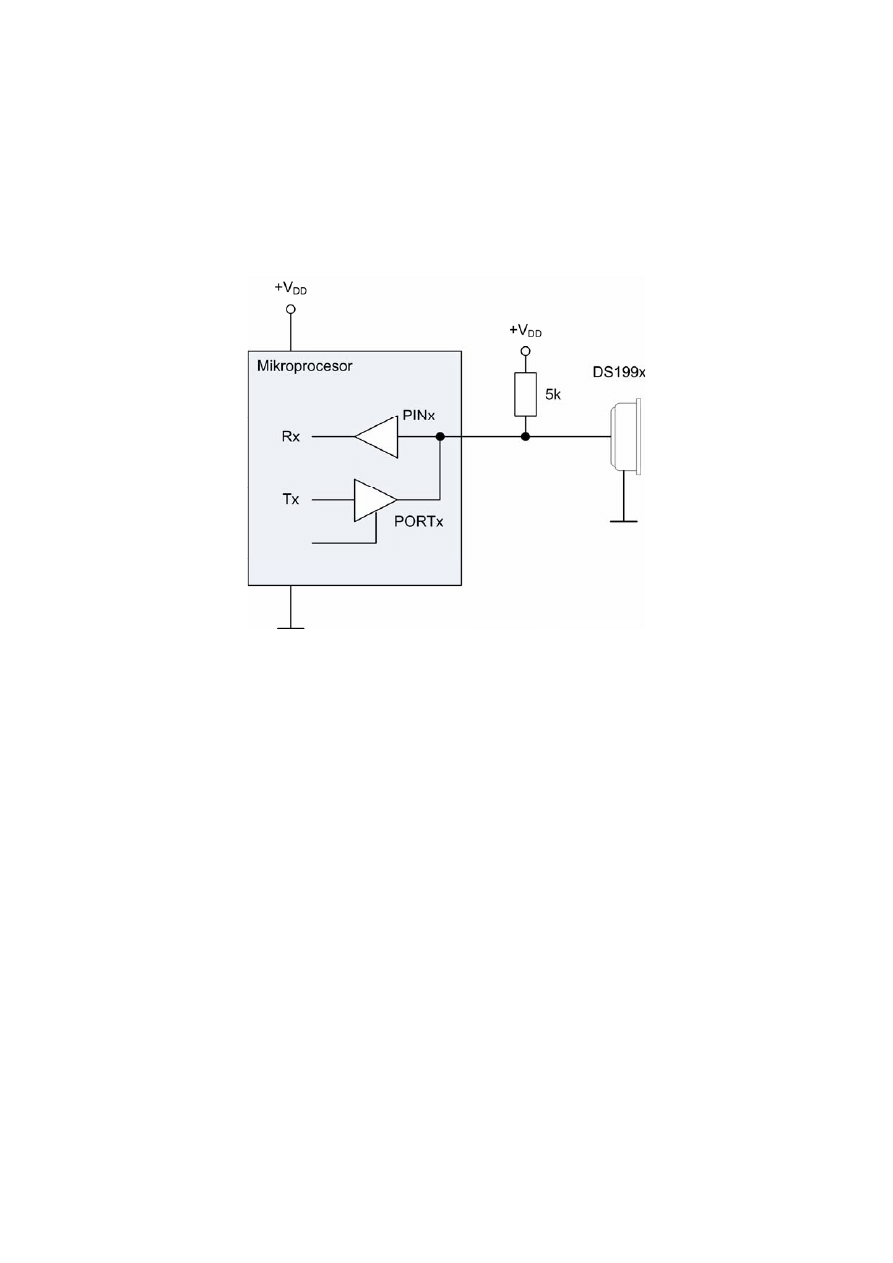
Do zapewnienia poprawnej transmisji potrzebny jest jedynie jeden port dwukierunkowy
z wyjściem „open drain”. Te wymagania spełnia większość portów procesora ATMega128.
Sposób dołączenia układów iButton do portu mikroprocesora zostało przedstawione na rys. 6.
Rys. 6. Sposób dołączenia układów iButton do portu mikroprocesora.
Obsługa linii transmisyjnej jest troszeczkę nietypowa, co wynika ze specyfiki interfejsu.
Wykorzystywana linia portu musi być skonfigurowana jako „wejście” bez wewnętrznego
„podciągania”. Odpowiedni bit portu PORTx musi być ustawiony na stałe na zero (linia Tx
na rys. 5). Realizacja stanu wysokiego na linii transmisyjnej jest uzyskiwane poprzez
ustawienie linii portu mikroprocesora jako wejście (odpowiedni bit rejestru DDRx ustawiony
na zero), dzięki czemu zewnętrzny rezystor podciągający wymusi stan wysoki. Natomiast stan
niski jest realizowany poprzez przełączenie linii portu na wyjście (odpowiedni bit rejestru
DDRx ustawiony na jeden), dzięki czemu uprzednio ustawione zero na odpowiednim bicie
rejestru PORTx wymusi stan niski na linii interfejsu. W przypadku odczytu stanu linii
transmisyjnej interfejsu 1-Wire przez mikroprocesor należy ustawić linię portu jako wejście
i odczytać odpowiedni bit rejestru PINx.
Wyszukiwarka
Podobne podstrony:
Magistrala 1 Wire Opis warstwy fizycznej interfejsu
Lokalizator ultradźwiękowy z wykorzystaniem magistrali 1 wire
wire chip SERWER POMIARU TEMPERATURY Z MAGISTRALĄ 1 WIRE
Magistrala v1
z8-opis plyty kompaktowej zawierajacej prace dyplomowa, AGH, Semestr 10, Magisterka
12.5. Energia jądrowa [v1.2], dodatek A5
Czesc III - opis jazy na rzece, PW IŚ, Magister, Sem I, metalowe konstrukcje hydrotechniczne, Projek
1 Wire Projekt V1 0id 10365 Nieznany
dodatek B Kr tki opis języka HTML
Opis przypadku, Magisterka materiały, Dydaktyka
Załącznik 1 - Opis wynalazku, Praca magisterska, Pozsostałe
12 5 Energia jądrowa [v1 2] dodatek A5id 13405
Netronix obsługa pastylek iButton 1 wire
opis budynek stalowy v1
więcej podobnych podstron