1.
Co należy uwzględnić przy doborze czasu próbkowania realizowanego cyfrowego układu regulacji?
a) charakterystyki częstotliwościowe obiektu regulacji
b) czas realizacji algorytmu lub kompensacji
c) dobroć regulacji
d) minimalnofazowość obiektu
2. Jaki jest główny cel stosowania odpornych układów regulacji
a) zmniejszenie wpływu zakłóceń na zmienną regulowaną
b) zmniejszenie wrażliowości układu regulacji na zmianę parametrów obiektu
c) poprawe dobroci układu regulacji
d) wyeliminowanie uchybu statycznego
3.
Zaznaczyć najczęściej stosowane standardy wejść i wyjść przetworników A/C i C/A,
+a) 0÷20mA,
+b) 0÷10V,
+c) 4÷20mA,
+d) -10÷+10V.
4. Czy róeżnica w realizacji regulatora rozmytego przy wykorzystaniu metodyki Mamdaniego i Sugeno
występuje przy:
a) rozmywaniu zmiennych wejściowych
b) wyostrzaniu zmiennych wyjściowych
c) w bazie reguł
d) w bazie wiedzy
5. Jakie są ograniczenia przy zastosowaniu minimalno-czasowych układów regulacji?
a)
minimalnofazowość obiektu,
b) ograniczona wartość sygnału sterującego
c) czas próbkowania
d)stabilność układu
6. Jakie działanie regulatora PID mozna pominąć przy sterowaniu obiektem astatycznym?
a) części różniczkującej
b) Części całkującej
c) częsći proporcjonalnej
d) podwójnego różniczkowania
7. Jaki jest cel stosowania układu kompensacji automatycznej?
a) eliminacja uchybu statycznego
b) eliminacja zakłócenia
c) zmniejszenie czasu regulacji
d) zmniejszenie przerególowania
8. Podany jest wykres odpowiedzi skokowej 1 i odpowiedzi skokowej 2, oraz jeden wykres sygnału
sterujacego, co zostało zmienione ze tak się zmieniła odpowiedz skokowa?
a) wzmocnienie ??
b) ogr sygnalu sterujacego
c) stala rozniczkowania
d) coś jeszcze
9. Główne różnice w metodach doboru nastaw regulatorów dyskretnych i regulatorów ciągłych:
a) opracowanie metody można zastosować tylko dla regulatorów PI i PID
b) obowiązują te same metody ale z uwzględnieniem czasu próbkowania
c) nie ma specjalnych metod dla regulatorów dyskretnych
d) nie ma żadnej różnicy.
10. Warunkiem koniecznym i wystarczającym stabilności liniowego, stacjonarnego układu dyskretnego jest:
a) aby wszystkie bieguny transmitancji?? znajdowały sie wewnątrz koła jedno??
b) aby wszystkie bieguny transmitancji znajdowały się z ?? strony płaszczyzny ze???
c) aby wszystkie zera transmitancji znajdowały się wewnątrz koła jednostkowego
d) aby wszyskie bieguny transmitancji znajdowały się poza kołem jednostkowym
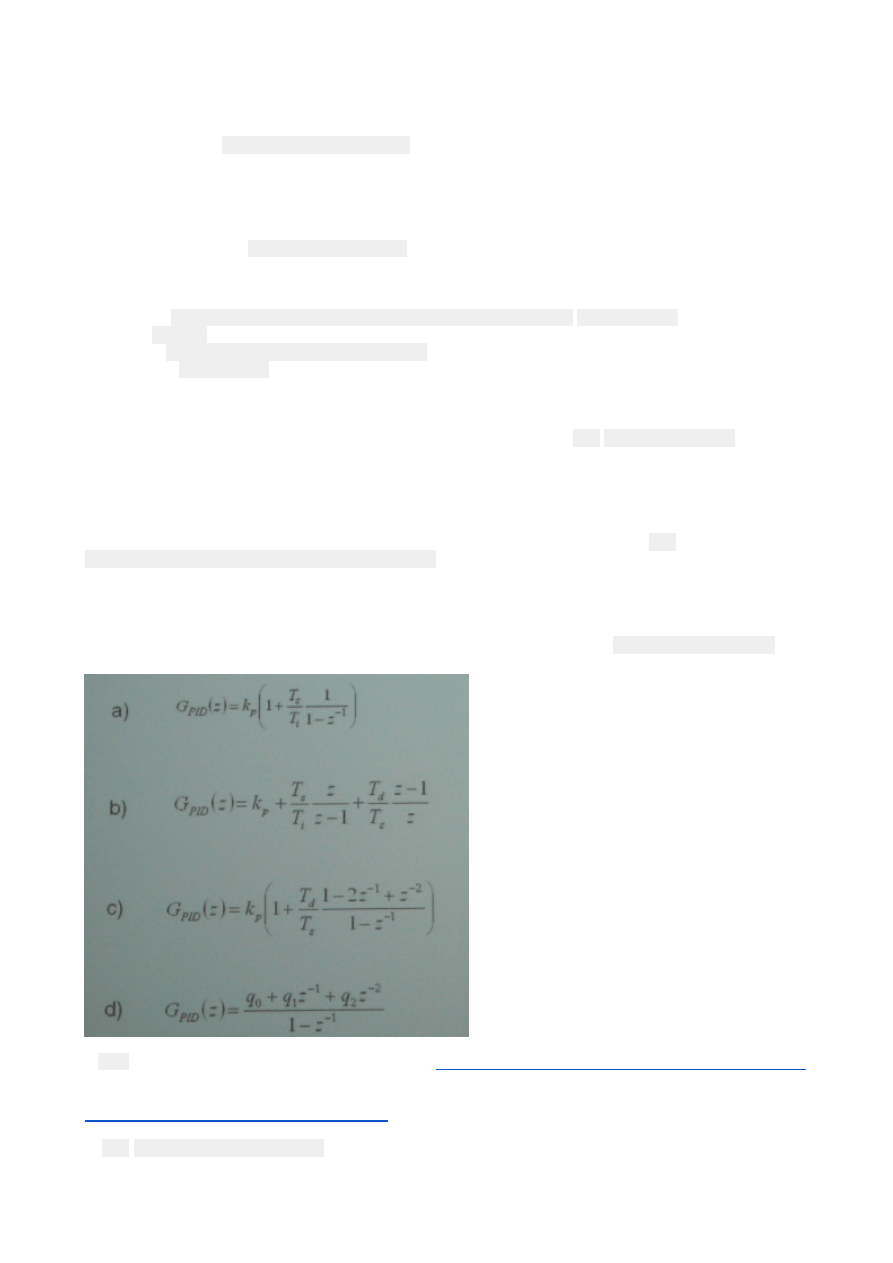
11. Transmitancja dyskretnego regulatora typu PID ma postać:
(a-b-c
-d) XD
12. Na schemacie drabinkowym jest zrobiony regulator PID, ktorą bramkę nalezy wyłaczyc aby pozbyc sie
efektu wind up?
a) M0
b) M1
c) M3
d) M4
13. metody wyostrzania (defuzyfikacji)
a) srodka ciężkości
b) pierwszego maksimum
c) ostatniego maksimum
d) mamdaniego
14. metody przejścia z dziedziny s na dziedzine z
a) ZOH
b) metod zero pole
c) aproksymacja Tustina
d) …….
15.algorytm pozycyjny
a. jest przyrostowy
b. położeniowy
c. okresla wartość absolutna
d.okresla zmiane wartości sygnalu
16. algorytm prędkościowy
a) jest przyrostowy
b) położeniowy
c) okresla wartość absolutna
d) okresla zmiane wartości sygnalu
17. filtr czebyszewa I
a) zafalowania w przepustowym
b) zaporowym
c)
d)
18. Filtr Bessela charakteryzuje się:
a) najbardziej liniowa charakterystyka fazowa
b) bardzo powolny spadek wzmocnienia w pasmie przejsciowym
c) stoswany jest w przypadkach gdy wazny jest czasowy przebieg sygnalu
d) zafalowania w pasmie zaporowym
19. Ktory filtr charakteryzuje się najwieksza liniowoscia i bardzo powolnym spadkiem?
a) Czybyszewa I
b) Czybyszewa II
c) Eliptyczny
c) Bessela
20. Który z modeli został przedstawiony na rysunku?
a) ARX
b) ARMAX
c) BJ
d) OE
21. Jaki jest główny cel stosowania adaptacyjnych układów regulacji?
a) zmniejszenie wpływu zakłóceń na zmienną regulowaną,
b) zmniejszenie wraSliwości układu regulacji na zmianę parametrów obiektu,
c) poprawę dobroci układu regulacji,
d) wyeliminowania uchybu statycznego.
22. Coś o Antyaliasingu
a) odpowiedzi warunek nyquista,
b) wystepuja skladowe o blednej czestotliwosci
c) cos z czasem próbkowania
d) ??
“Koherentnie” - Jacek Snamina
Czytanie po 23 +1 do worow pod oczami -
“Tak się nie robi... ale można”
Proszę o wstawianie ( kopiuj wklejka wskazana, dla jednolitego formatowania )
(+1)
lub
(-1)
Np.
1. Coś tam pytanie
a) Coś tam odpowiedź(...)
(+1) (+1) (+1)
b) Coś tam odpowiedź(...)
c) Coś tam odpowiedź(...)
(-1)/Nie tak bo(...)/
(+1)/A właśnie, że tak bo(...)/ (+1) (+1) (+1) (+1) (+1)
d) Coś tam odpowiedź(...)
(+1)
=========================================================================
1. Co należy uwzględnić przy doborze czasu próbkowania realizowanego cyfrowego układu
regulacji?
a) charakterystyki częstotliwościowe obiektu regulacji
(+1) (+1)(+1)
b) czas realizacji algorytmu lub kompensacji
(+1) (+1) (+1)(+1)wyk 2 slajd 15
c) dobroć regulacji
(+1) (+1)(+1)wyk 2 slajd 15
d) minimalnofazowość obiektu
(+1) (+1) wykład 2, str 14?
2. Jaki jest główny cel stosowania odpornych układów regulacji
a) zmniejszenie wpływu zakłóceń na zmienną regulowaną
(+1) (+1)/Wykład 6, slajd 61/
(-1)/(GŁÓWNY)
b) zmniejszenie wrażliwości układu regulacji na zmianę parametrów obiektu
(+1) (+1) (+1) (+1)/jw(+1)
c) poprawę dobroci układu regulacji
d) wyeliminowanie uchybu statycznego
3. Jaki jest główny cel stosowania adaptacyjnych układów regulacji?
a) zmniejszenie wpływu zakłóceń na zmienną regulowaną,
(+1)(+1)/Wykład 1, slajd 13/
b) zmniejszenie wrażliwości układu regulacji na zmianę parametrów obiektu,
(+1)(+1)(+1)
c) poprawę dobroci układu regulacji,
d) wyeliminowania uchybu statycznego.
4. Czy różnica w realizacji regulatora rozmytego przy wykorzystaniu metodyki Mamdaniego i Sugeno
występuje przy:
a) rozmywaniu zmiennych wejściowych
b) wyostrzaniu zmiennych wyjściowych
(+1)(+1)
(potrzebna
weryfikacja)
/
https://www.dropbox.com/s/zo5lvh4rnddtk3w/04.08121302.pdf
, str
6 i 9,
wyostrzanie
jest inaczej skonstruowane. Także tu: https://www.dropbox.com/s/m5dukjvvkidpxe9/B0612042212.pdf
rozdział II
c) w bazie reguł
(+1)(+1)(+1)
d) w bazie wiedzy
5. Jakie są ograniczenia przy zastosowaniu minimalno-czasowych układów regulacji?
a)
minimalnofazowość obiektu,
b) ograniczona wartość sygnału sterującego
(+1)/str 14 pdf
http://www.zpss.aei.polsl.pl/content/dydaktyka/ATD/W_13.pdf
c) czas próbkowania
(+1) http://en.wikipedia.org/wiki/Optimal_control#Discrete-time_optimal_control
“For instance, using a variable step-size routine to integrate the problem's dynamic equations may generate
a gradient which does not converge to zero (or point in the right direction) as the solution is approached”
d) stabilność układu
6. Jakie działanie regulatora PID mozna pominąć przy sterowaniu obiektem astatycznym?
a) części różniczkującej
b) Części całkującej
(+1)(+1)//Słowa dr Maślany
c) części proporcjonalnej
d) podwójnego różniczkowania
7. Jaki jest cel stosowania układu kompensacji automatycznej?
a) eliminacja uchybu statycznego
b) eliminacja zakłócenia
(+1)(+1) wyk 6 slajd 36
c) zmniejszenie czasu regulacji
d) zmniejszenie przeregulowania
8.
Zaznaczyć najczęściej stosowane standardy wejść i wyjść przetworników A/C i C/A,
a) 0÷20mA,
(+1)
(potrzebna weryfikacja)
/Datasheet modułu FX2N-5A (+1)2N-5A (+1)
b) 0÷10V,
(+1)(+1)
c) 4÷20mA,
(+1) (+1) Datasheet modułu 2DA (+1)
d) -10÷+10V.
(+1) (+1) (+1)
9. Główne różnice w metodach doboru nastaw regulatorów dyskretnych i regulatorów ciągłych:
a) opracowanie metody można zastosować tylko dla regulatorów PI i PID
b) obowiązują te same metody ale z uwzględnieniem czasu próbkowania
(+1) (+1) wyk 3 slajd 48
c) nie ma specjalnych metod dla regulatorów dyskretnych
d) nie ma żadnej różnicy.
10. Warunkiem koniecznym i wystarczającym stabilności liniowego, stacjonarnego układu
dyskretnego jest:
a) aby wszystkie bieguny transmitancji znajdowały sie wewnątrz koła jednostkowego
(+1)
(+1)(+1)(+1)(+1)
”to są podstawy, prosze państwa
”
b) aby wszystkie bieguny transmitancji znajdowały się z lewej strony płaszczyzny zespolonej
c) aby wszystkie zera transmitancji znajdowały się wewnątrz koła jednostkowego
d) aby wszyskie bieguny transmitancji znajdowały się poza kołem jednostkowym
11. Transmitancja dyskretnego regulatora typu OPID ma postać:
OPYD2
?
(+1)(+1)(+1)(+1)(+1)(+1)
a)
b)
(+1)/na siłę, wykład 3 slajd 58 -> PID parallel ->
http://www.mathworks.com/help/control/ref/pid.html
na samym dole + to co pisała Nanika na forum
tyle że w matlabie mamy forme Kd, Ki a w tym
podpunkcie mamy Ts/Ti i Td/Ts/
jezeli Kp =1 to można chyba tak zapisać.
http://airagh.linuxpl.info/post7757.html#p7757
c)
d)
(+1) (+1) (+1)/Wykład 3 slajd 54/
================================================================================
Więcej pytań:
12. Podany jest wykres odpowiedzi skokowej 1 i odpowiedzi skokowej 2, oraz jeden wykres sygnału
sterujacego, co zostało zmienione ze tak się zmieniła odpowiedz skokowa?
a) wzmocnienie
b) ograniczenie sygnału sterującego
(+1)
c) stala rozniczkowania
d) coś jeszcze
13. Na schemacie drabinkowym jest zrobiony regulator PID, ktorą bramkę nalezy wyłaczyc aby
pozbyc sie efektu wind up?
a) M0
b) M1
c) M3
(+1)
d) M4
Trzeba wyłączyć działanie części całkujące w regulatorze.
14. Metody przejścia z dziedziny s na dziedzine z
a) ZOH
(+1) (+1) (+1) wykład 3 slajd 27
b) metod zero pole
(+1)(+1) (+1) wykład 3 slajd 27 (+1)
c) aproksymacja Tustina
(+1) (+1)(+1) wykład 3 slajd 27
d) …….
15.Algorytm pozycyjny
a) jest przyrostowy
b) położeniowy
(+1) (+1) (+1)/Wykład 3, slajd 36/
c) okresla wartość absolutna
(+1) (+1) (+1)/Wykład 3, slajd 36/
d) okresla zmiane wartości sygnalu
16. Agorytm prędkościowy
a) jest przyrostowy
(+1) (+1)/Wykład 3, slajd 36/
b) położeniowy
c) okresla wartość absolutna
d) okresla zmiane wartości sygnalu
(+1) (+1) (+1)/Wykład 3, slajd 36/
17. Filtr czebyszewa I (wykład 10 strona 8 slajd 45)
a) zoptymalizowany dla najszybszego spadku wzmocniania w paśmie przejściowym
(+1)(+1)(+1)(+1)
b) zafalowania w paśmie przepustowym
(+1)(+1)(+1)(+1)
c) stosowany jest w przypadkach gdy ważny jest szybki spadek wzmocnienia i brak zafalowań w paśmie
zaporowym
(+1)(+1)(+1)(+1)
d) ???
18. Filtr Bessela charakteryzuje się:
a) najbardziej liniowa charakterystyka fazowa
(+1)(+1)(+1)(+1)
b) bardzo powolny spadek wzmocnienia w pasmie przejsciowym
(+1)(+1)(+1)(+1)
c) stoswany jest w przypadkach gdy wazny jest czasowy przebieg sygnalu
(+1)(+1)(+1)(+1)
d) zafalowania w pasmie zaporowym
19. Ktory filtr charakteryzuje się najwieksza liniowoscia i bardzo powolnym spadkiem?
a) Czybyszewa I
b) Czybyszewa II
c) Eliptyczny
d) Bessela
(+1)(+1)(+1)(+1)
20. Który z modeli został przedstawiony na rysunku?
a) ARX
(+1)(+1)
b) ARMAX (zamiast 1 jest C)
c) BJ (u-> B/F i e-> C/D)
d) OE (B/F i przy e nie ma nic)
21. Metody wyostrzania (defuzyfikacji)

a) srodka ciężkości
(+1) (+1)(+1)(+1)
b) pierwszego maksimum
(+1) (+1)(+1) (+1) wyk 9 slajd 35
c) ostatniego maksimum
(+1) (+1)(+1)(+1)
d) mamdaniego
(to jeden z modeli rozmytych)
Pozostałe metody: środka maksimum, wysokości, singletonów
22. Coś o Antyaliasingu
a) warunek nyquista,
(+1)
b) wystepuja skladowe o blednej czestotliwosci
(+1)
c) cos z czasem próbkowania
(+1)
d) ??
?
23. Minimalno wariancyjny:
a) minimalizacja wariancji
(+1)
b) minimalizacja odchylenia standardowego
(+1)
c) ???
d) ???
Dodatkowe zagadnienia:
+2 pytania o efekt Wind-UP
(+1)
+minimalnofazowość
+zera w środku bieguny na zewnątrz.
+Nieminimalnofazowy na odwrót
+Kwantyzacja
+Jakość regulacji
Wyszukiwarka
Podobne podstrony:
MAKROEKONOMIA PYTANIA ALL sciaga(1), MATERIAŁY DO NAUKI
Egz inz GiK pytania ALL
pytania all
pytania all, aaa, studia 22.10.2014, Materiały od Piotra cukrownika, materialy Kamil, płytkas V, Sci
pytania - all MIX', Prywatne, Anatomia od Olgi
MAKROEKONOMIA PYTANIA ALL-1, WSB IiE
pytania all, PJWSTK, 0sem, BSI
pytania all
SD pytania EGZAMIN, AGH WIMIR AiR, Semestr 5, Sterowanie dyskretne, SD egzamin
pytaniaa all, PWR, Zarządzanie, SEMESTR III, Marketing
hydrologia pytania all (2)
BankowoÅÄ Pytania ALL (2)x
MAKROEKONOMIA PYTANIA ALL, WSB IiE, Semestr 2, Makroekonomia
prawo pytania all, semestr I, Podstawy Prawa, Wykłady I semestr, prawo, prawo, prawo
EGZAMIN-pytania - all MIX', Prywatne, ANATOMIA, Głowa i Szyja
SD pytania EGZAMIN
więcej podobnych podstron