
Rodzina MELSEC FX
Programowalne sterowniki logiczne
Podręcznik dla początkujących
FX
1S
, FX
1N
,
FX
2N
, FX
2NC
,
FX
3U
MITSUBISHI ELECTRIC
Nr kat.: 209120
24102007
Wersja A
INDUSTRIAL AUTOMATION
MITSUBISHI ELECTRIC


O podręczniku
Tekst, ilustracje, rysunki i przykłady, podane zostały w tym podręczniku tylko
do celów informacyjnych. Przeznaczone zostały do tego,
żeby dopomóc przy wyjaśnieniu instalacji, działania, programowania i używania programowalnych sterowników
logicznych serii MELSEC FX1S, FX1N, FX2N,FX2NC i FX3U.
Jeśli pojawią się jakiekolwiek pytania związane z instalacją i działaniem każdego z opisanych tutaj produktów,
prosimy skontaktować się z lokalnym biurem sprzedaży lub dystrybutorem (zob. tylną okładnę).
Najnowsze informacje i odpowiedzi na często zadawane pytania można znaleźć na naszej stronie internetowej
www.mitsubishi-automation.pl.
MMITSUBISHI ELECTRIC EUROPE BV zastrzega sobie prawo do dokonywania zmian w tym podręczniku lub w
danych technicznych swoich produktów w każdej chwili bez powiadomienia.
© 01/2006 – 10/2007

Podręcznik dla początkujących do programowalnych sterowników logicznych z rodziny MELSEC FX
FX
1S
, FX
1N
, FX
2N
, FX
2NC
i FX
3U
Nr kat.: 209120
Wersja
Zmiany / dodatki / korekty
A
10/2007
pdp-tr
Wydanie pierwsze


Wskazówki związane z bezpieczeństwem
Do użytku wyłącznie przez wykwalifikowany personel
Niniejszy podręcznik przeznaczony jest do użytku wyłącznie przez odpowiednio wykwalifikow-
anych techników elektryków, którzy są w pełni zaznajomieni ze stosowanymi w technologii autom-
atyki standardami bezpieczeństwa. Cała praca z opisanym sprzętem, włącznie z projektem sys-
temu, instalacją, konfiguracją, konserwacją, serwisem i testowaniem wyposażenia, może być
wykonywana wyłącznie przez wyszkolonych techników elektryków z potwierdzonymi kwalifika-
cjami, którzy znaja wszystkie wlasciwe dla technologii automatyki regulacje i standardy bezpie-
czenstwa. Jakiekolwiek działania lub modyfikacje sprzętu i/lub oprogramowania naszych
produktów, wyraźnie nie opisane w tym podręczniku, mogą być wykonane wyłącznie przez autor-
yzowany personel Mitsubishi Electric.
Właściwe użycie niniejszych produktów
Programowalne sterowniki logiczne serii FX
1S
, FX
1N
, FX
2N
, FX
2NC
i FX
3U
są przeznaczone wyłącznie
do określonych zastosowań, wyraźnie opisanych w niniejszym podręczniku. Wszystkie parametry i
ustawienia wyspecyfikowane w tym podręczniku, muszą być przestrzegane. Opisane produkty
zostały zaprojektowane, wyprodukowane, przetestowane i udokumentowane w ścisłej zgodności
z właściwymi standardami bezpieczeństwa. Niekompetentna modyfikacja sprzętu lub oprogramo-
wania, lub nieprzestrzeganie ostrzeżeń podanych na produkcie i w niniejszym podręczniku, mogą
skutkować poważnym osobistym urazem i/lub zniszczeniem mienia. Wraz z programowalnymi ste-
rownikami logicznymi serii FX
1S
, FX
1N
, FX
2N
FX
2NC
i FX
3U
, mogą być używane wyłącznie te urządze-
nia peryferyjne i sprzęt rozszerzający, które zostały zatwierdzone przez Mitsubishi Electric.
Wszystko to i użycie jakiegoś innego, lub zastosowanie tych produktów, będzie uznawane za
niewłaściwe.
Stosowne regulacje bezpieczeństwa
Wszystkie regulacje bezpieczeństwa zapobiegające wypadkom i właściwe dla określonych zastos-
owań, muszą być przestrzegane przy projektowaniu systemu, instalacji, konfiguracji, obsłudze, ser-
wisowaniu i testowaniu tych produktów. Wyszczególnione poniżej regulacje, są pod tym wzglę-
dem szczególnie istotne. Lista ta nie pretenduje do tego, by być kompletną, natomiast Państwo są
odpowiedzialni za zapoznanie się z nią i postępowanie zgodnie z właściwymi dla Państwa i dla loka-
lizacji, wymaganiami.
쎲 Norma VDE
VDE 0100
Regulacje związane z budową instalacji zasilających o napięciach poniżej 1000 V.
VDE 0105
Eksploatacja instalacji zasilających
VDE 0113
Instalacje elektryczne z elektronicznym wyposażeniem
VDE 0160
Sprzęt elektroniczny używany w instalacjach zasilających
VDE 0550/0551
Regulacje związane z transformatorami
VDE 0700
Bezpieczeństwo związane z używaniem urządzeń elektrycznych w gospodarstwie domo-
wych i w podobych zastosowaniach
VDE 0860
Regulacje bezpieczeństwa związane z używaniem w gospodarstwie domowym i w podob-
nych zastosowaniach, zasilanych z sieci urządzeń elektronicznych i ich wyposażenia.
Podręcznik dla początkujących
I
Wskazówki związane z bezpieczeństwem
쎲 Regulacje związane z bezpieczeństwem przeciwpożarowym
쎲 Regulacje zapobiegające wypadkom
VBG Nr.4
Systemy elektryczne i wyposażenie
Zawarte w tym podręczniku ostrzeżenia związane z bezpieczeństwem
Ostrzeżenia, które w niniejszym podreczniku związane są z bezpieczeństwem, identyfikowane są
następująco:
P
NIEBEZPIECZENSTWO:
Nieprzestrzeganie ostrzeżeń wyróżnionych tym symbolem może skutkować śmiercią i
osobistym urazem użytkownika.
E
OSTRZEZENIE:
Nieprzestrzeganie ostrzeżeń wyróznionych tym symbolem może skutkować uszkodzeniem
sprzętu lub innego mienia.
II
MITSUBISHI ELECTRIC
Wskazówki związane z bezpieczeństwem
Ogólne informacje związane z bezpieczeństwem i środki ostrożności
Następujące środki ostrożności przeznaczone są jako ogólne wytyczne przy stosowaniu systemów
PLC wraz z innym wyposażeniem. Te środki ostrożności muszą być zawsze przestrzegane przy pro-
jektowaniu, instalacji i obsłudze systemów sterujących.
P
NIEBEZPIECZEŃSTWO
:
Podręcznik dla początkujących
III
Wskazówki związane z bezpieczeństwem
쎲 Należy przestrzegać wszystkich regulacji związanych z bezpieczeństwem i zapobiega-
niem wypadków, odpowiednich do określonego zastosowania. Przed wykonywaniem
instalacji i okablowaniem, lub otwarciem jakichkolwiek części składowych pod-
zespołów i urządzeń, należy zawsze odłączyć wszelkie źródła zasilania.
쎲 Częściskładowe,podzespołyiurządzeniamusząbyćzainstalowanezawszewodpornej
na wstrząsy obudowie, z dopasowaną pokrywą i bezpiecznikami lub wyłącznikami.
쎲 Urządzenia mające stałe połączenie z siecią zasilającą, muszą być przyłączone do
instalacji obiektowej za pomocą rozłącznika wszystkich biegunów i właściwych bezpie-
czników.
쎲 Należy regularnie sprawdzać kable zasilające i przewody łączące ze sprzętem pod
kątem przerw i uszkodzenia izolacji. Jeśli zostanie znalezione uszkodzenie kabla,
należy natychmiast odłączyć sprzęt i kable od zasilania i wymienić wadliwe okablowa-
nie.
쎲 Przed użyciem sprzętu po raz pierwszy należy sprawdzić, czy znamionowe parametry
zasilania są dostosowane do lokalnej sieci zasilającej.
쎲 Należy podjąć odpowiednie kroki i zapewnić, żeby uszkodzenie kabla lub przerwanie
żyły w liniach sygnałowych nie wywołało nieokreślonych stanów w sprzęcie.
쎲 Ty jesteś odpowiedzialny za podjęcie koniecznych środków ostrożności i musisz
zapewnić, żeby programy przerwane z powodu częściowego wstrzymania dostaw
energii elektrycznej i uszkodzenia zasilania, mogły zostać poprawnie i bezpiecznie
wznowione. Szczególnie należy zapewnić, że pod żadnymi warunkami, nawet na
krótkie okresy czasu, nie mogą powstać sytuacje niebezpieczne.
쎲 Urządzenia awaryjnego wyłączania, zgodne z EN 60204/IEC 204 i VDE 0113, przez cały
czas i we wszystkich trybach pracy PLC muszą pozostawać w pełni działające. Funkcja
resetu, awaryjnego wyłączania urządzenia, musi być zaprojektowana tak, że nigdy nie
może spowodować niekontrolowanego lub niezdefiniowanego ponownego uruchomi-
enia.
쎲 Należy zastosować sprzętowe i programowe środki ostrożności, celem zabezpieczenia
przed możliwością powstania niezdefiniowanych stanów systemu sterowania, spo-
wodowanych połączeniem kabla sygnałowego lub przerwaniem żyły.
쎲 Gdy używane są moduły, należy zawsze upewniać się, że wszystkie elektryczne i
mechaniczne specyfikacje i wymagania są dokładnie przestrzegane.

IV
MITSUBISHI ELECTRIC
Wskazówki związane z bezpieczeństwem
Podręcznik dla początkujących
V
Spis treści
Contents
Programowalne sterowniki logiczne
3.4.9 Wprowadzanie do pamięci, odczytywanie i kasowanie wyników działania . . . . 3-17
VI
MITSUBISHI ELECTRIC
Spis treści
5.2.4 Kopiowanie urządzeń źródłowych do wielu miejsc docelowych (FMOV) . . . . . . 5-11
VIII
MITSUBISHI ELECTRIC
Spis treści
1
Wstęp
1.1
O podręczniku
Niniejszy podręcznik pozwoli czytelnikowi na zapoznanie się z użytkowaniem sterowników
programowalnych rodziny MELSEC FX. Przeznaczony jest dla tych użytkowników, którzy jeszcze nie
mają doświadczenia z programowaniem sterowników PLC.
Programiści, którzy mają już doświadczenie związane z innymi producentami PLC, mogą również
skorzystać z tego podręcznika jako przewodnika, który pozwoli na przejście do rodziny MELSEC FX.
Symbol „
£“ używany jest jako znak identyfikujący różne sterowniki występujące w tym samym
przedziale. Na przykład oznaczenie „FX
1S
-10
£-££“ odnosi się do wszystkich sterowników,
których nazwa zaczyna się od FX
1S
-10, np . FX
1S
-10 MR-DS, FX
1S
-10 MR-ES/UL, FX
1S
-10 MT-DSS i
FX
1S
-10 MT-ESS/UL.
1.2
Więcej informacji
Więcej szczegółowych informacji na temat poszczególnych produktów można znaleźć w serii
podręczników obsługi lub instalacji dla poszczególnych modułów.
Celem zapoznania się ze wszystkimi sterownikami rodziny MELSEC FX, należy zobaczyć Katalog
Rodziny MELSEC FX, nr kat. 167840. Katalog ten zawiera również informacje na temat opcji
rozszerzających i dostępnych akcesoriów.
Zapoznanie się z Podręcznikiem dla Początkujących GX Developer FX, nr kat. 166391, umożliwi
wprowadzenie do programu narzędziowego.
Wszystkie instrukcje programowe szczegółowo udokumentowane można znaleźć w Podręczniku
Programowania rodziny MELSEC FX, nr kat. 132738 oraz w „Podręczniku programowania –
instrukcje podstawowe i użytkowe, Seria sterowników programowalnych FX
3U
/FX
3UC
”, nr kat.
168591.
Możliwości i opcje komunikacyjne sterowników MELSEC FX zostały szczegółowo udokumentow-
ane w Communications Manual, nr kat. 070143.
Wszystkie podręczniki i katalogi Mitsubishi, mogą być za darmo pobrane ze strony internetowej
Mitsubishi
.
Podręcznik dla początkujących
1 – 1
Wstęp
O podręczniku
1 – 2
MITSUBISHI ELECTRIC
Więcej informacji
Wstęp
2
Programowalne sterowniki logiczne
2.1
Co to jest PLC?
W przeciwieństwie do tradycyjnch sterowników, w których funkcje określane są przez ich fizyczne
połączenia, funkcje programowalnych sterowników logicznych zdefiniowane są programowo. PLC
również muszą być podłączone przewodami do świata zewnętrznego, lecz w celu przystosowania
programów do różnych zadań sterujących, zawartość pamięci programu może zostać zmieniona w
każdym czasie.
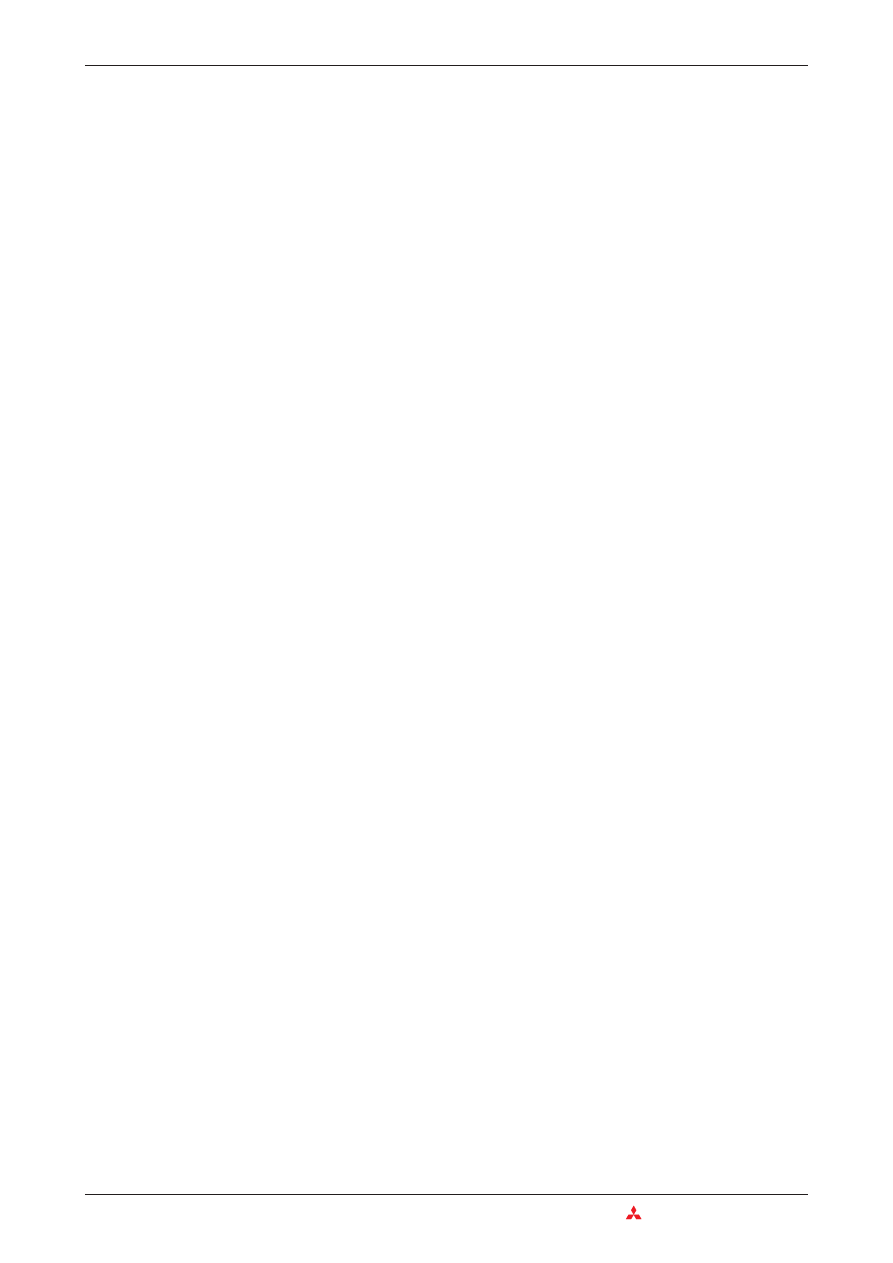
Programowalne sterowniki logiczne wprowadzają dane, przetwarzają je i następnie wyprowadzają
wynik. Proces ten wykonywany jest w trzech stopniach:
쎲 stopień wejściowy,
쎲 stopień przetwarzania
i
쎲 stopień wyjściowy
Stopień wejściowy
Stopień wejściowy przenosi do stopnia przetwarzającego sygnały wejściowe z wyłączników,
przycisków lub czujników.
Sygnały z tych elementów wytwarzane są jako część procesu sterującego i wprowadzane są do
wejść jako stany logiczne. Stopień wejściowy przenosi do stopnia przetwarzającego w postaci
wstępnie przetworzonej.
Stopień przetwarzający
W stopniu przetwarzającym wstępnie przetworzone sygnały ze stopnia wejściowego, są przetwar-
zane i łączone ze sobą za pomocą operacji logicznych i innych funkcji. Pamięć programu w stopniu
przetwarzającym jest w pełni programowalna. Kolejność przetwarzania może zostać zmieniona w
każdej chwili, przez modyfikację lub wymianę zapisanego programu.
Stopień wyjściowy
Wyniki przetwarzania sygnałów wejściowych przez program, dostarczane są do stopnia
wyjściowego, gdzie sterują przełączalnymi elementami, jak styczniki, lampki sygnalizacyjne, cewki
zaworów itd.
Podręcznik dla początkujących
2 – 1
Programowalne sterowniki logiczne
Co to jest PLC?
Programowalne sterowniki logiczne
Stopień
wejściowy
Stopień
wyjściowy
Stopień
przetwarzający
Styczniki
Przełącznik
Wejście
Wyjście
2.2
Jak sterowniki PLC przetwarzają programy?
PLC realizuje swoje zadania wykonując program, który zazwyczaj przygotowywany jest poza sterownikim, a
następnie przesyłany do pamięci programu sterownika. Przed rozpoczęciem programowania użyteczne jest
podstawowe zrozumienie, w jaki sposób PLC przetwarza ten program.
Program PLC składa się z kolejnych instrukcji, które sterują funkcjami sterownika. PLC wykonuje
instrukcje sterujące po kolei, tzn. jedna za drugą. Sekwencja kompletnego programu jest cykliczna,
co oznacza, że jest ciągle powtarzana w pętli. Czas niezbędny do powtórzenia jednego programu,
nazywany jest czasem cyklu programu lub okresem.
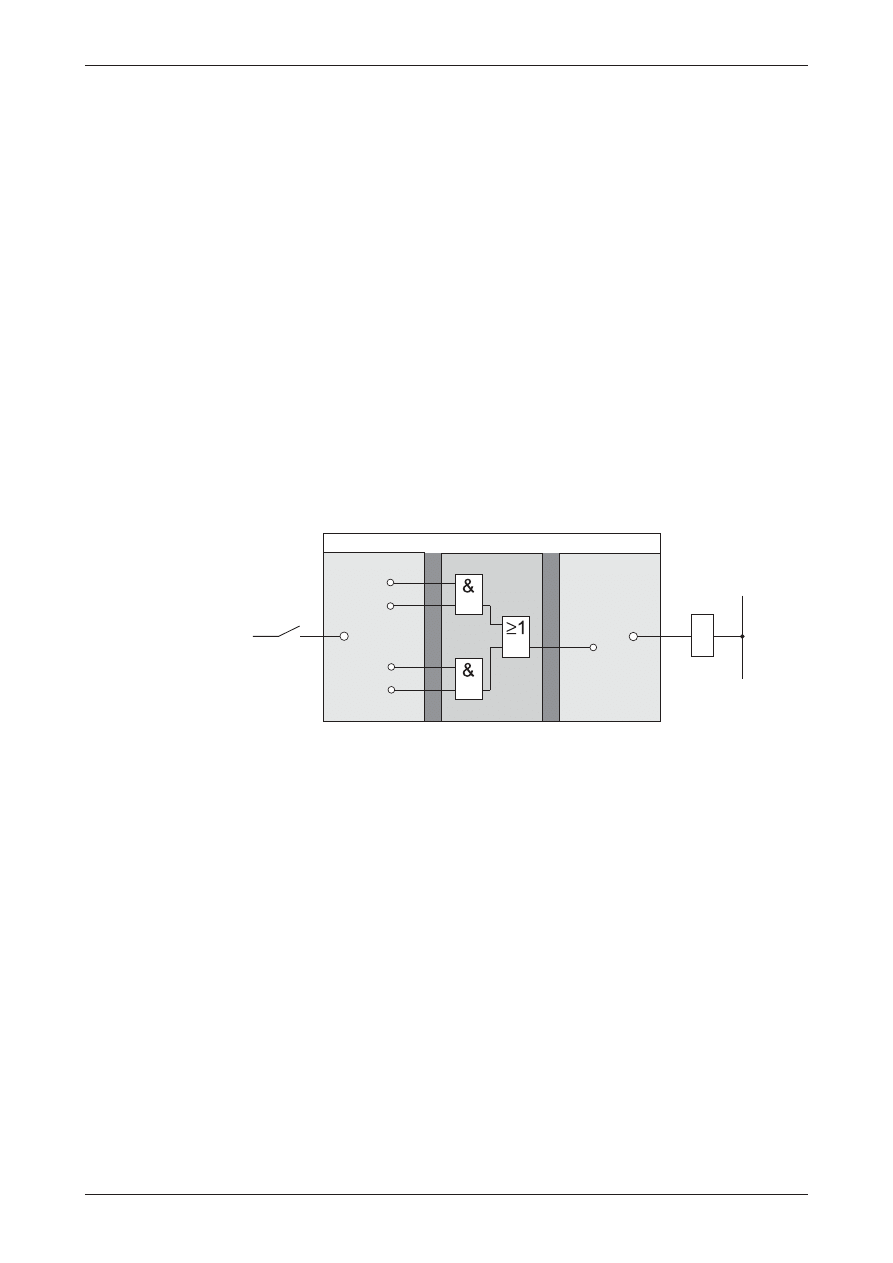
Przetwarzanie obrazu procesu
Program w PLC nie jest wykonywany bezpośrednio na wejściach i wyjściach, lecz na „obrazie
procesu” wejść i wyjść:
Obraz procesu wejściowego
Na początku każdego cyklu programu, system wybiera stany sygnałów na wejściach i zapisuje do
bufora, tworząc wejściowy „obraz procesu”.
2 – 2
MITSUBISHI ELECTRIC
Jak sterowniki PLC przetwarzają programy?
Programowalne sterowniki logiczne
....
....
....
Załączenie PLC
Kasowanie pamięci wyjściowej
Zaciski wejściowe
Obraz przetwarzanych
wejść
Program PLC
Obraz przetwarzanych
wejść
Zaciski wyjściowe
Przekazanie do wyjść
obrazu procesu
Instrukcja 1
Instrukcja 2
Instrukcja 3
Instrukcja n
Odczyt wejść i sygnałów stanu
oraz zapis do pamięci
obrazu wejść
Sygnały wejściowe
Sygnały wyjściowe
Wykonanie programu
Po tym wykonywany jest program, w czasie którego PLC ma dostęp do zapisanych stanów obrazu
procesu. Oznacza to, że aż do następnego cyklu programu, żadna kolejna zmiana stanu wejś-
ciowego, nie zostanie zarejestrowana!
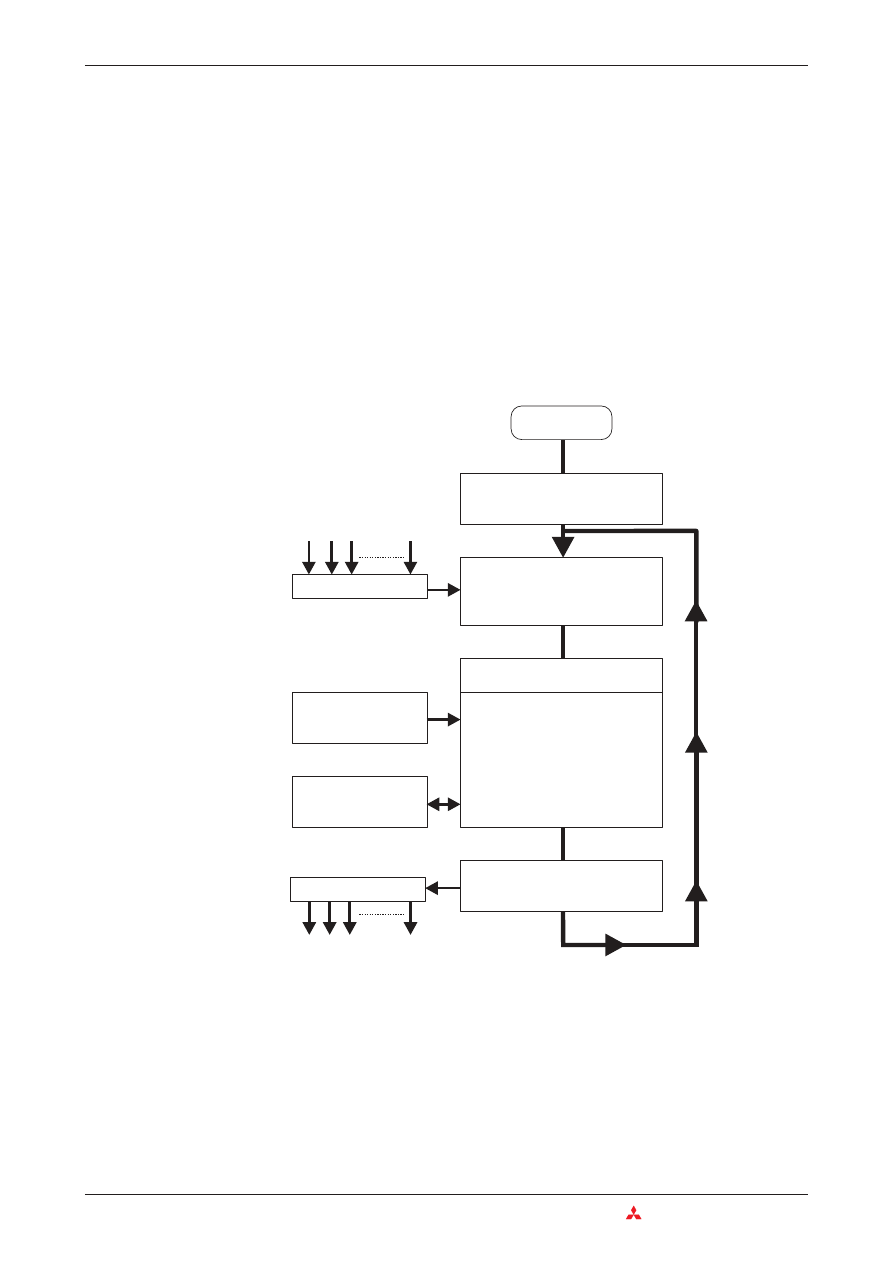
Program wykonywany jest od góry do dołu, w kolejności, w której instrukcje zostały zaprogramo-
wane. Wyniki poszczególnych kroków programu zostają zapisane i mogą być użyte w czasie
bieżącego cyklu programu.
Obraz procesu wyjściowego
Wynik operacji logicznych, które związane są z wyjściami, zapisywane są do bufora wyjściowego,
tworząc obraz procesu wyjściowego. Obraz procesu wyjściowego przechowywany jest w buforze
wyjściowym, aż do kolejnego nadpisania bufora. Po przepisaniu wartości do wyjść cykl programu
zostaje powtórzony.
Różnice pomiędzy przetwarzaniem sygnałów w PLC i w sterownikach konfigurowanych przez
fizyczne połączenie
W sterownikach konfigurowanych za pomocą fizycznego połączenia, program definiowany jest
przez elementy funkcjonalne i ich podłączenie (okablowanie). Wszystkie operacje przeprowadzane
są równocześnie (wykonanie równoległe). Każda zmiana sygnału wejściowego powoduje
natychmiastową zmianę stanu odpowiedniego sygnału wyjściowego.
W PLC nie jest możliwa reakcja na zmiany stanu sygnałów wejściowych, aż do następnego cyklu pro-
gramu następujacego po tej zmianie. Teraz ta niedogodność kompensowana jest głównie przez
bardzo krótkie cykle programu. Czas trwania cyklu programu zależy od liczby i rodzaju wykonywa-
nych instrukcji.
Podręcznik dla początkujących
2 – 3
Programowalne sterowniki logiczne
Jak sterowniki PLC przetwarzają programy?
M6
M2
M1 M8013
4
X000 X001
0
9
M0
Y000
M0
Y001
Zapisanie wyniku
Wykonanie programu
Wynik zapisanego
działania
Wyjście sterujące
2.3
Rodzina MELSEC FX
Mikrosterowniki kompaktowe serii MELSEC FX , dostarczają podstawowych elementów do budowy
ekonomicznych rozwiązań dla małych i średnich układów sterujących i zadań pozycjonujących,
wymagających od 10 do 256 wbudowanych wejść i wyjść, w zastosowaniach przemysłowych i
obsłudze budynków.
Za wyjątkiem FX
1S
, wszystkie sterowniki serii FX mogą być rozszerzane, dotrzymując kroku
zmianom w aplikacji i zwiększającym się wymaganiom użytkownika.
Dostępne są również połączenia sieciowe. Umożliwia to sterownikom z rodziny FX komunikowanie
się z innymi sterownikami PLC i urządzeniami HMI oraz panelami sterującymi. Omawiane systemy
PLC mogą być zintegrowane w sieciach MITSUBISHI jako stacje lokalne, jak i stacje slave w sieciach
otwartych, np. PROFIBUS/DP.
Dodatkowo, z użyciem sterowników rodziny MELSEC FX, można zbudować sieci wielopunktowe i
peer-to-peer.
FX
1N
, FX2N i FX3U mają możliwość rozbudowy modułowej, co czyni z nich dobry wybór dla złożo-
nych zastosowań i zadań, wymagających specjalnych funkcji, takich jak przetwarzanie analogowo -
cyfrowe i cyfrowo - analogowe, czy możliwości komunikacji sieciowej.
Wszystkie sterowniki z tej serii są częścią większej rodziny MELSEC FX i są w pełni ze sobą
kompatybilne.
2 – 4
MITSUBISHI ELECTRIC
Rodzina MELSEC FX
Programowalne sterowniki logiczne
Wymagania
FX
1S
FX
1N
FX
2N
FX
2NC
FX
3U
Maks. ilość wbudowanych
we/wy
30
60
128
96
128
Możliwość rozbudowy
(maks. możliwa liczba
we/wy)
34
132
256
256
384
Pamięć programu (kroki)
2000
8000
16000
16000
64000
Czas wykonania instrukcji
logicznej (
ms)
0,55 – 0,7
0,55 – 0,7
0,08
0,08
0,065
Liczba instrukcji
(standardowe / Step Ladder
/ funkcje specjalne)
27 / 2 / 85
27 / 2 / 89
27 / 2 / 107
27 / 2 / 107
27 / 2 / 209
Maks. liczba możliwych do
podłączenia specjalnych
modułów funkcyjnych
—
2
8
4
8 z prawej
10 z lewej
2.4
Wybór właściwego sterownika
Jednostki centralne rodziny MELSEC FX dostępne są w wielu różnych wersjach, z możliwością
wyboru różnego napięcia zasilania i zastosowanej na wyjściu technologii. Można wybierać pomi-
ędzy jednostkami zaprojektowanymi dla napięć zasilających 100–240 V AC, 24 V DC lub 12–24 V DC i
pomiędzy wyjściami przekaźnikowymi oraz tranzystorowymi.
Chcąc wybrać właściwy sterownik do swojego zastosowania, trzeba odpowiedzieć na następujące
pytania:
쎲 Ile sygnałów (styków zewnętrznych wyłączników, przycisków i czujników) należy doprowadzić
do wejść?
쎲 Jakie rodzaje funkcji mają być uruchomione i ile ich jest?
쎲 Jakie napięcie zasilania jest dostępne?
쎲 Jakiej wielkości są obciążenia, które muszą załączać wyjścia? Do przełączania dużych obciążeń
należy wybrać wyjścia przekaźnikowe, natomiast wyjścia tranzystorowe do operacji szybkiego
przełączania, nie wymagających wyzwalania.
Podręcznik dla początkujących
2 – 5
Programowalne sterowniki logiczne
Wybór właściwego sterownika
Seria
We/Wy Typ
Liczba
wejść
Liczba
wyjść
Zasilanie
Typ wyjścia
FX
1S
10
FX
1S
-10 M
£-££
6
8
24 V DC
lub
100 – 240 V AC
Tranzystor
lub przekaźnik
14
FX
1S
-14 M
£-££
8
6
20
FX
1S
-20 M
£-££
12
8
30
FX
1S
-30 M
£-££
16
14
FX
1N
14
FX
1N
-14 M
£-££
8
6
12 – 24 V DC
lub
100 – 240 V AC
Tranzystor
lub przekaźnik
24
FX
1N
-24 M
£-££
14
10
40
FX
1N
-40 M
£-££
24
16
60
FX
1N
-60 M
£-££
36
24
FX
2N
16
FX
2N
-16 M
£-££
8
8
24 V DC
lub
100 – 240 V AC
Tranzystor
lub przekaźnik
32
FX
2N
-32 M
£-££
16
16
48
FX
2N
-48 M
£-££
24
24
64
FX
2N
-64 M
£-££
32
32
80
FX
2N
-80 M
£-££
40
40
128
FX
2N
-128 M
£-££
64
64
FX
2NC
16
FX
2NC
-16 M
£-££
8
8
24 V DC
Tranzystor
lub przekaźnik
32
FX
2NC
-32 M
£-££
16
16
64
FX
2NC
-64 M
£-££
32
32
96
FX
2NC
-96 M
£-££
48
48
FX
3U
16
FX
3U
-16 M
£-££
8
8
24 V DC
lub
100 – 240 V AC
Tranzystor
lub przekaźnik
32
FX
3U
-32 M
£-££
16
16
48
FX
3U
-48 M
£-££
24
24
64
FX
3U
-64 M
£-££
32
32
80
FX
3U
-80 M
£-££
40
40
128
FX
3U
-128 M
£-££
64
64
100 – 240 V AC
Tranzystor
lub przekaźnik
2.5
Budowa sterownika
Wszystkie sterowniki z tej serii, mają tę samą podstawową konstrukcję. Wszystkie główne elementy
funkcjonalne i części montażowe zostały opisane w słowniku terminów w dziale 2.5.7.
2.5.1
Obwody wejściowe i wyjściowe
Obwody wejściowe używają pływających wejść. Są one elektrycznie odizolowane od innych
obwodów PLC za pomocą złącz optoelektrycznych. W obwodach wyjściowych stosowana jest
technologia przekaźnikowa jak i tranzystorowa. Tranzystory wyjściowe są również elektrycznie
odizolowane od innych obwodów PLC za pomocą złącza optoelektronicznego.
Napięcie przełączania na wszystkich wejściach cyfrowych, musi mieć określoną wartość (np. 24 V
DC). Napięcie to może być wzięte z zasilacza wbudowanego do PLC. Jeśli napięcie przełączane na
wejściach jest mniejsze od wartości znamionowej (np. 24 V DC), wtedy sygnał wejściowy nie będzie
przetwarzany.
Maksymalne wartości prądów dla wyjść przekażnikowych wynoszą 2A i 250 V AC przy obciążeniu
rzeczywistym oraz 0,5 A i 24 V DC również dla obciążenia rzeczywistego.
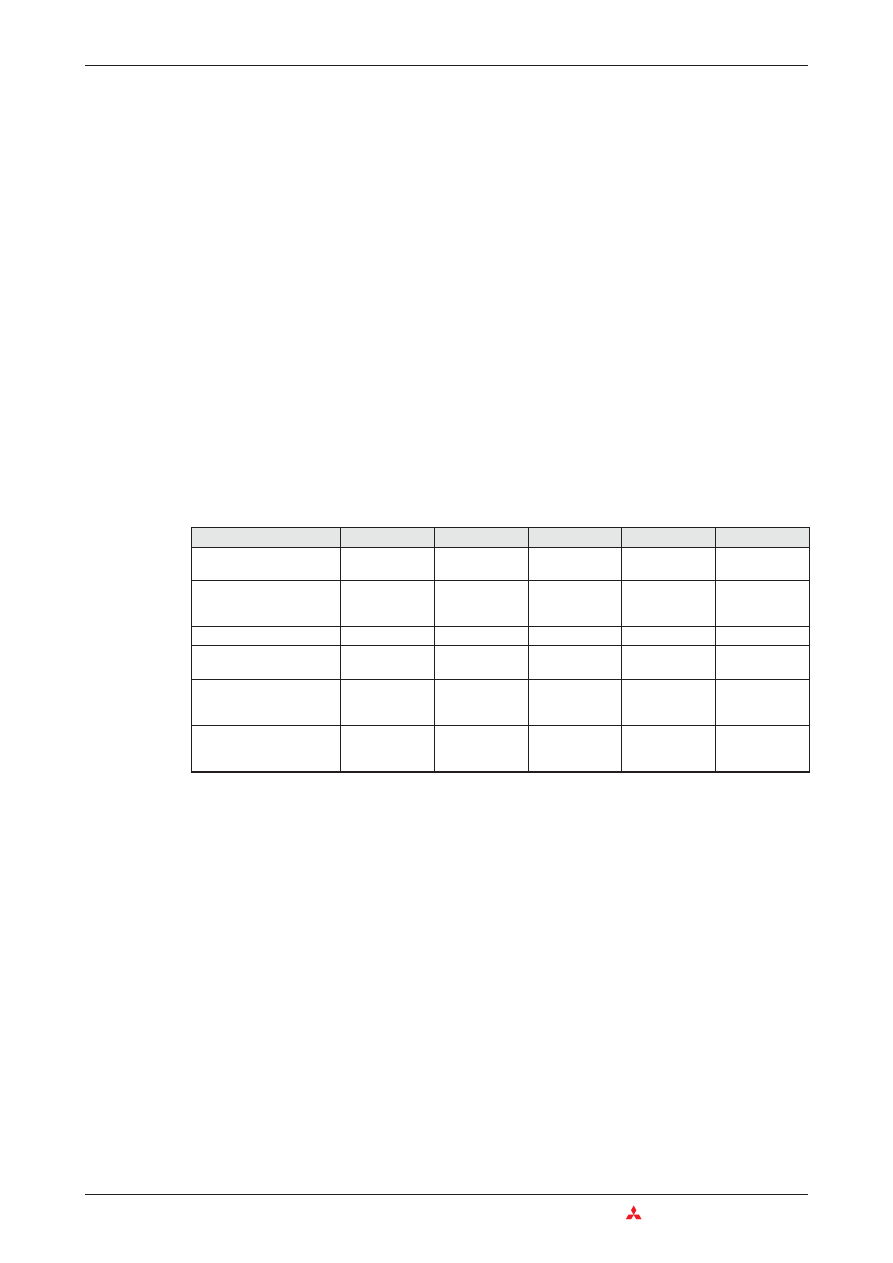
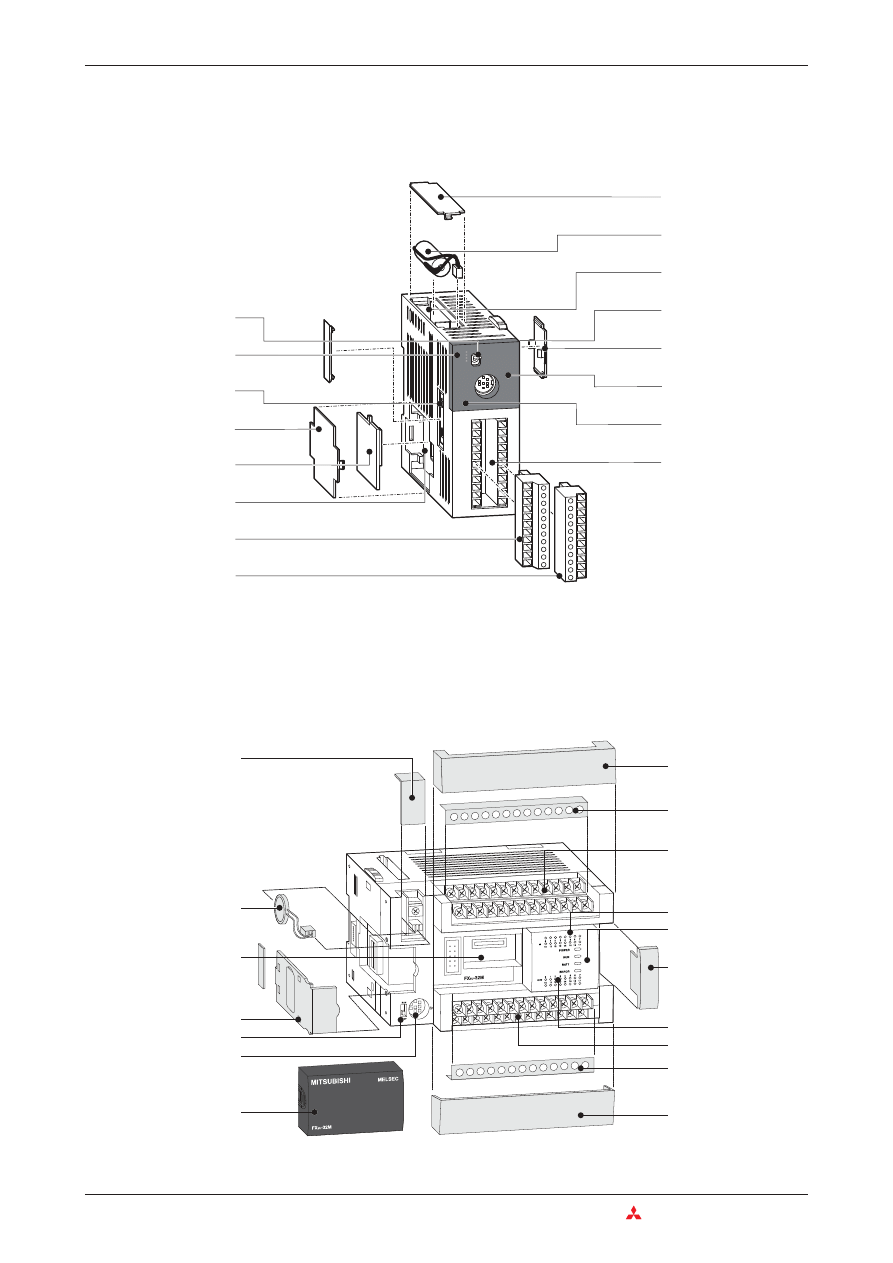
2.5.2
Budowa jednostki centralnej MELSEC FX1S
2 – 6
MITSUBISHI ELECTRIC
Budowa sterownika
Programowalne sterowniki logiczne
0 1 2 3
4 5 6 7
0 1 2 3
4 5
IN
OUT
POWER
FX -14MR
1S
RUN
ERROR
X7
X5
X3
X1
S/S
X6
X4
X2
X0
N
L
100-240
VAC
14MR
-ES/UL
Y4
Y2
Y1
Y0
COM0 COM1COM2
Y3
Y5
24V
0V
MITSUBISHI
Połączeniedo zasilacza
Zaciski wejść cyfrowych
Wskaźniki LED
stanu działania
Interfejs dla płytek adap-
torów rozszerzających
Osłona
zabezpieczająca
Przełącznik RUN/STOP
Osłona zacisków
Podłączenie do zasilacza
serwisowego
2 potencjometry
analogowe
Wskaźniki LED
stanu wejść
Otwór mocujący
Wycięcie pod adaptory lub
panel sterujący
Podłączenie jednostki
programującej
Osłona zabezpieczająca
Wskaźniki LED
stanu działania wyjść
Zaciski wejść cyfrowych
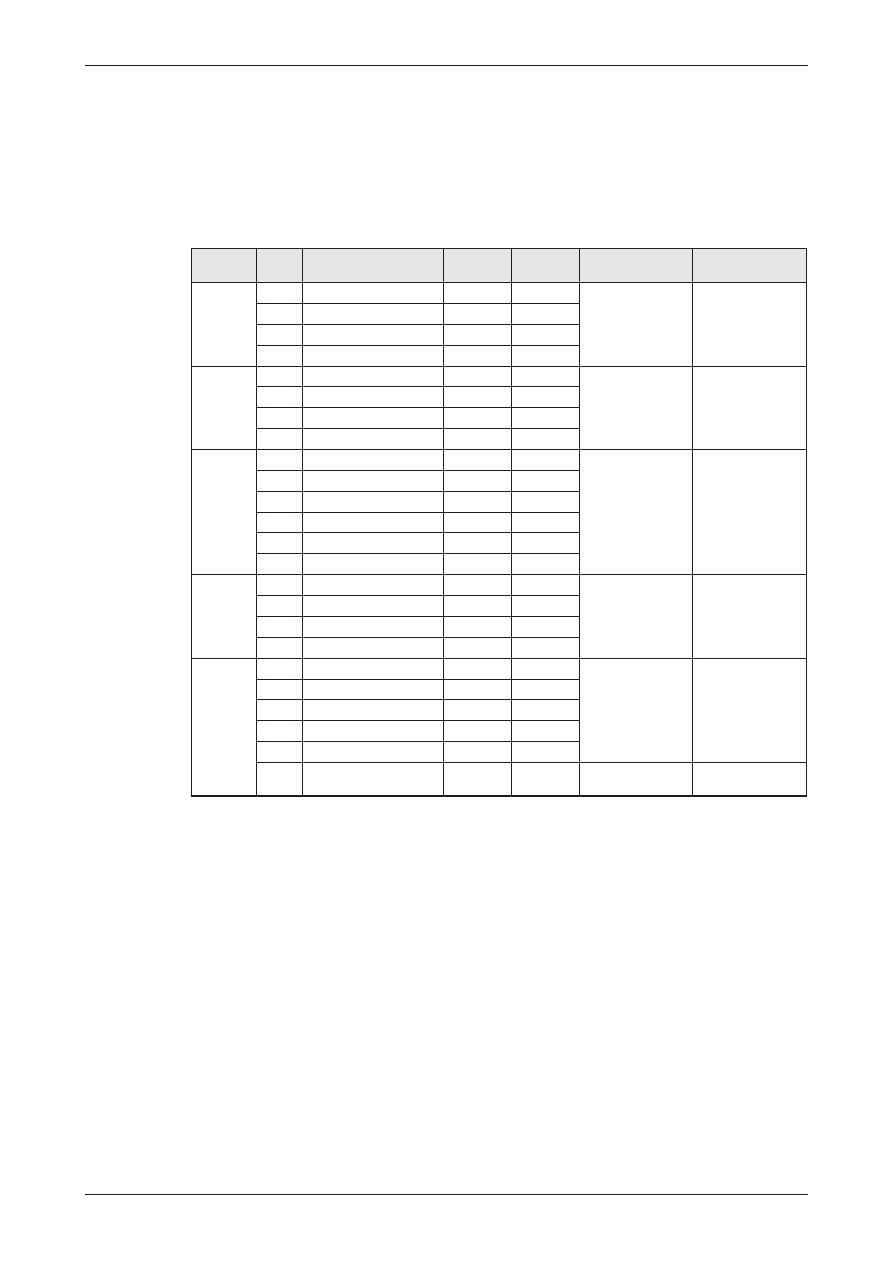
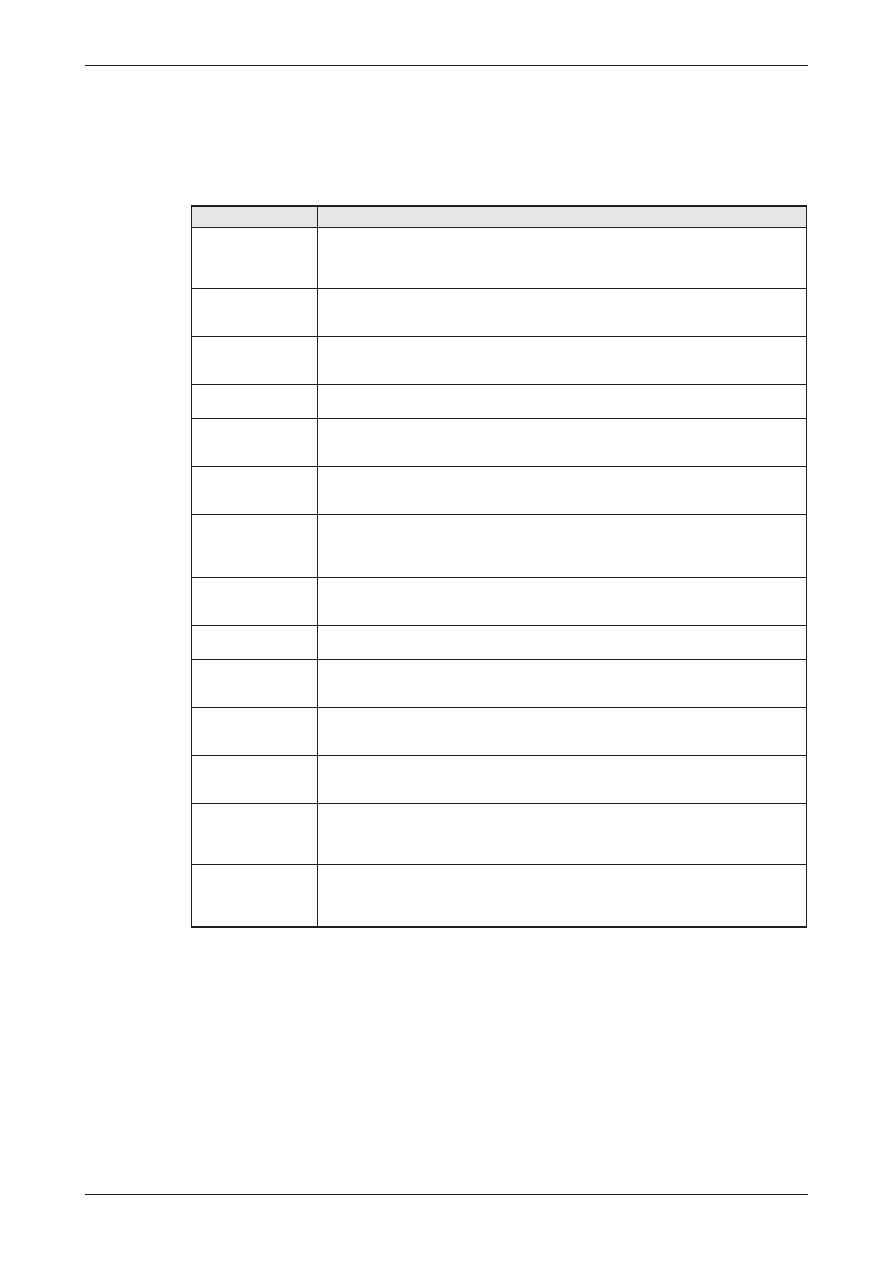
2.5.3
Budowa jednostki centralnej MELSEC FX
1N
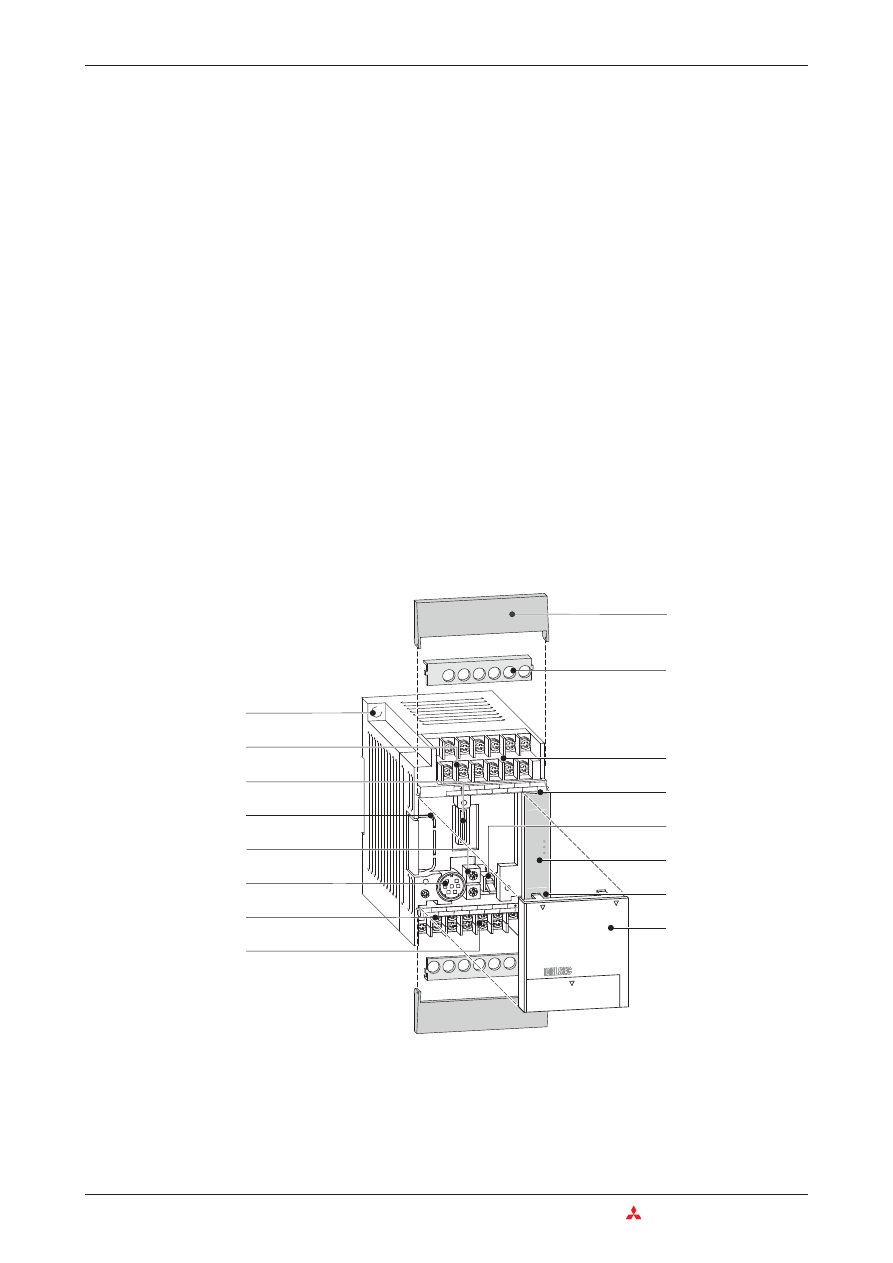
2.5.4
Budowa jednostki centralnej MELSEC FX
2N
Podręcznik dla początkujących
2 – 7
Programowalne sterowniki logiczne
Budowa sterownika
Osłona zabezpieczająca
Osłona zacisków
Zaciski wyjść
cyfrowych
Podłączenie do zasilacza
serwisowego
Podłączenie jednostki
programującej
Otwór mocujący
Osłona zacisków
Przełącznik RUN/STOP
Magistrala
rozszerzająca
Połączenie zasilacza
Wskaźniki LED stanu
działania
Wskaźniki LED stanu
działania wyjść
Osłona
zabezpieczająca
Pokrywa
Gniazdo dla kaset
pamięci, adaptorów
i wyświetlaczy
2 potencjometry
analogowe
Zaciski wejść
cyfrowych
Wskaźniki LED stanu
wejść
Pokrywa obudowy
Bateria podtrzymująca
pamięć
Zaciski wejść cyfrowych
Wymienna listwa
zaciskowa wyjść
cyfrowych
Podłączenie rozszerzeń
Wskaźniki LED stanu
działania wyjść
Osłona zabezpieczająca
magistralę rozszerzającą
Pokrywa obudowy
Osłona zabezpieczająca
Połączenie płytek ada-
ptorów rozszerzających
Podłączenie jednostki
programującej
Wskaźniki LED stanu
działania
Przełącznik RUN/STOP
Wskaźniki LED stanu
wejść
Gniazdo kasety pamięci
Podłączenie do zasilacza
serwisowego
Otwór mocujący
0 1 2 3
4 5 6 7
8 9 10 11
12 13 14 15
0 1 2 3
4 5 6 7
10 11
IN
OUT
POWER
FX -24MR
1N
RUN
ERROR
100-240
VAC
X7
X11 X13
X15
X5
X3
X1
S/S
X6
X10
X12
X14
X4
X2
X0
N
L
24MR
-ES/UL
Y10
Y6
Y5
Y3
COM3
Y4
COM4
Y7
Y11
COM2
COM1
COM0
24+
Y2
Y1
Y0
0V
MITSUBISHI
Osłona zacisków
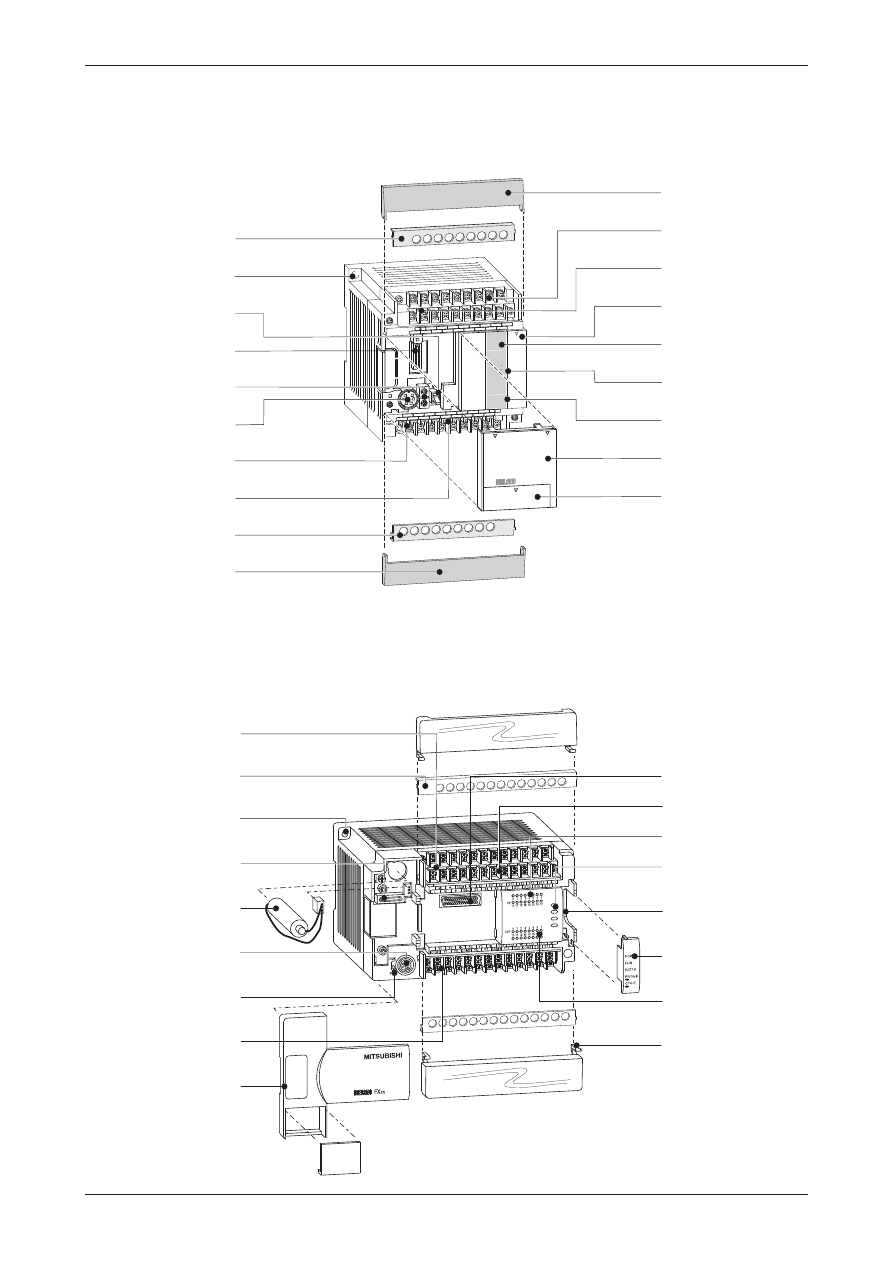
2.5.5
Budowa jednostki centralnej MELSEC FX
2NC
2.5.6
Budowa jednostki centralnej MELSEC FX
3U
2 – 8
MITSUBISHI ELECTRIC
Budowa sterownika
Programowalne sterowniki logiczne
Zaciski wyjść
cyfrowych
Zaciski wejść
cyfrowych
Gniazdo kasety
pamięci
Kaseta pamięci
(dodatkowa)
Pokrywa
POWER
RUN
BATT
ERROR
X0
1
2
3
X4
5
6
7
Y0
1
2
3
Y4
5
6
7
RUN
STOP
MITSUBISHI
FX -16MR-T-DS
2NC
MELSEC
COM
X7
X6
X5
X4
•
COM
X3
X2
X1
X0
Y4
•
COM1
Y3
Y2
Y1
Y0
Przełącznik RUN/STOP
Magistrala rozszerzająca
(z boku)
Miejsce
na baterię
Wskaźniki LED stanu
działania wyjść
Osłona zabezpieczająca
magistralę rozszerzającą
Osłona
zabezpieczająca
LEDy stanu działania
2-gi interfejs do
adaptora CNV
Bateria podtrzym
ująca pamięć
Wskaźniki LED stanu
wejść
Złącze listwy
zaciskowej
Pokrywa baterii
Miejsce instalacji
wyświetlacza FX3U-7DM
Podłączenie jednostki
programującej
Wskaźniki LED stanu
działania wyjść
Pokrywa zaślepki dla
płytki rozszerzającej
Wskaźniki LED stanu
działania
Przełącznik RUN/STOP
Osłona zabezpieczająca
magistralę rozszerzającą
Wskaźniki LED stanu
wejść
Wierzchnia pokrywa
(używana, gdy FX3U-7DM
nie jest zainstalowany)
Bateria podtrzymująca
pamięć
Osłona zabezpieczająca
Zaciski wyjściowe
Osłona zacisków
Osłona zabezpieczająca
Zaciski wejść
cyfrowych
Osłona zacisków
2.5.7
Elementy funkcjonalne i części montażowe PLC
Poniższa tabela opisuje znaczenie i funkcjonalność pojedynczych elementów i części sterowników
PLC MITSUBISHI.
Podręcznik dla początkujących
2 – 9
Programowalne sterowniki logiczne
Budowa sterownika
Część składowa
Opis
Połączenie płytek
adaptorów
rozszerzających
Do tego interfejsu mogą być podłączone dodatkowe płytki adaptorów rozszerzających. W całej
linii FX (z wyjątkiem FX2NC), dostępny jest cały asortyment różnych adaptorów. Adaptory te
poszerzają możliwości sterowników o dodatkowe funkcje lub interfejsy komunikacyjne. Płytki
adaptorów włączane są bezpośrednio do gniazda.
Połączenie z jednostką
programującą
Połączenie to może być wykorzystane do podłączenia programatora ręcznego FX-20P-E,
komputera PC lub notebooka, z zainstalowanym programem narzędziowym (np. GX Devel-
oper/FX).
EEPROM
Pamięć typu odczyt/zapis, do której może być wprowadzony program PLC i odczytany za
pomocą programu narzędziowego.Ta pamięć półprzewodnikowa zachowuje swoją zawartość
bez zasilania, nawet w przypadku awarii zasilania nie wymaga baterii podtrzymującej.
Gniazdo kasety
pamięci
Gniazdo dodatkowej kasety pamięci. Wstawienie kasety pamięci blokuje wewnętrzną pamięć
sterownika, który teraz będzie wykonywał tylko program zapisany w tej kasecie.
Magistrala
rozszerzająca
Mogą tutaj być podłączone dodatkowe moduły rozszerzające we/wy oraz specjalne moduły
funkcyjne, które poszerzają możliwości systemu PLC. Przegląd dostępnych modułów można
znaleźć w rozdziale 6.
Potencjometry
analogowe
Potencjometry analogowe używane są do ustawiania analogowych wartości zadanych. Nastawa
ta może być wybrana przez program PLC i użyta do timerów, wyjścia impulsowego i innych
funkcji (zob. dział 4.6.1).
Zasilacz pomocniczy
Zasilacz pomocniczy (nie dotyczy FX2NC) jest źródłem stabilizowanego napięcia 24V DC dla
sygnałów wejściowych i czujników. Moc takiego zasilacza zależy od modelu sterownika (np.
FX
1S
i FX
1N
: 400mA; FX
2N
-16M
£-££ do FX
2N
-32M
£-££ 250 mA, FX
2N
-48M
£-££ do
FX
2N
-64M
£-££ 460 mA)
Wejścia cyfrowe
Wejścia cyfrowe używane są do wprowadzania sygnałów sterujących z podłączonych
przełączników, przycisków lub czujników. Wejścia te mogą odczytywać wartości ON (sygnał
załączony) i OFF (sygnał niezałączony)
Wyjścia cyfrowe
W zależności od charakteru aplikacji, do tych wyjść można podłączyć wiele różnych elementów
wykonawczych i innych urządzeń.
Diody LED do
pokazywania stanu
wejścia
Diody te pokazują, które wejścia są aktualnie podłączone do źródła sygnału, tzn. do
określonego napięcia. Gdy do wejścia zostanie doprowadzony sygnał, odpowiedni LED zaświeci
się, pokazując, że stan tego wejścia jest ON.
Diody LED do
pokazywania stanu
wyjścia
Diody te pokazują bieżące stany ON/OFF wyjść cyfrowych. W zależności od modelu i typu
wyjścia, mogą być przełączane różne rodzaje napięć i prądów.
Diody LED do
pokazywania stanu
działania
Diody LED RUN, POWER i ERROR, pokazują bieżący status sterownika. POWER pokazuje, że
zasilanie zostało włączone, RUN świeci wtedy, gdy program PLC jest w trakcie wykonywania, i
ERROR zapala się wówczas, gdy zostanie zarejestrowane wadliwe działanie.
Bateria podtrzymująca
pamięć
Na wypadek awarii zasilania, bateria ta zabezpiecza zawartość ulotnej pamięci RAM w
sterownikach PLC MELSEC (tylko w FX
2N
, FX
2NC
i FX
3U
). Zabezpiecza zatrzaskowy
(podtrzymywany ) obszar timerów, liczników i przekaźników. Dodatkowo, gdy zasilanie PLC
zostanie wyłączone, jest źródłem zasilania dla wbudowanego zegara czasu rzeczywistego.
Przełącznik RUN/STOP
Sterowniki PLC MELSEC, mają dwa tryby działania, RUN i STOP. Przełącznik RUN/STOP pozwala
na ręczne przełączanie pomiędzy tymi dwoma trybami. W trybie RUN, PLC wykonuje program
zapisany w pamięci. W trybie STOP, wykonanie programu zostaje zatrzymane i możliwe jest
zaprogramowania sterownika.

2 – 10
MITSUBISHI ELECTRIC
Budowa sterownika
Programowalne sterowniki logiczne
3
Wstęp do programowania
Program składa się z sekwencji instrukcji programowych. Instrukcje te określają funkcjonalność PLC i
przetwarzane są sekwencyjnie w kolejności, w jakiej zostały wprowadzone przez programistę. Tak więc
w celu stworzenia programu PLC, należy przeanalizować sterowany proces i rozłożyć go na kroki,
które mogą być przedstawione w postaci instrukcji. Instrukcja programu, reprezentowana w schemacie
drabinkowym przez linijkę lub “szczebel” drabinki, jest najmniejszą jednostką programu PLC.
3.1
Struktura instrukcji programu
Instrukcja programu składa się z samej instrukcji (nazywanej czasem rozkazem) i jednego lub więcej
(w przypadku instrukcji użytkowych) operandów, które w PLC nawiązują do urządzeń. Niektóre
instrukcje wprowadzane są samodzielnie bez określania jakiegokolwiek operandu - są to instrukcje,
które sterują wykonaniem programu w PLC.
Każda wprowadzona instrukcja ma automatycznie przyporządkowany numer kroku, który w unik-
alny sposób identyfikuje jej pozycję w programie. Jest to istotne dlatego, ponieważ możliwe jest
wprowadzenie w kilku miejscach programu, takiej samej instrukcji w odniesieniiu do tego samego
urządzenia.
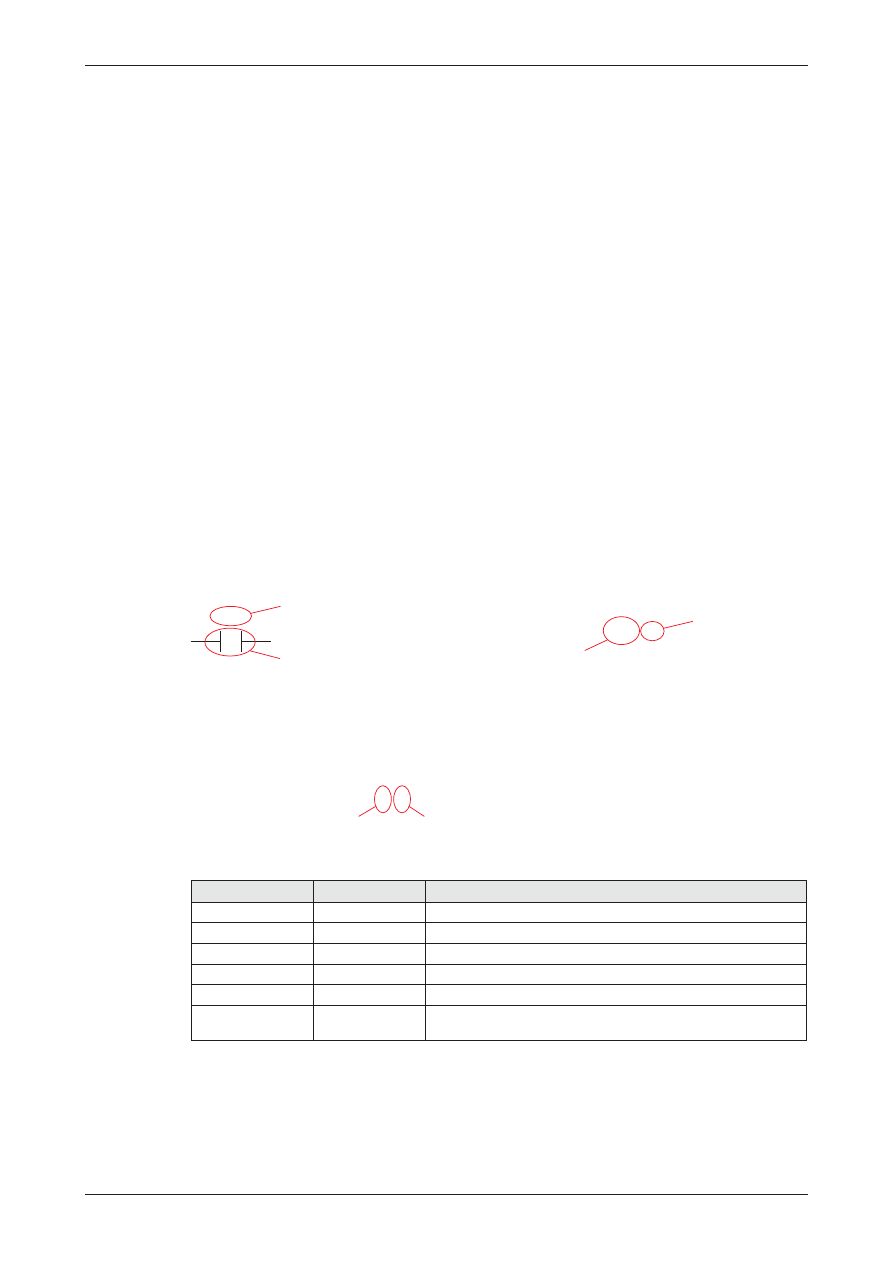
Poniższe ilustracje pokazują, w jaki sposób instrukcje programu zostały przedstawione w takich formatach
języków programowania, jak schemat drabinkowy (z lewej) oraz lista instrukcji (z prawej):
Instrukcja opisuje, co ma być zrobione, tzn. opisuje funkcję, którą ma wykonać sterownik. Urządze-
nie jest operandem, na którym wykonywana jest ta funkcja. Jego oznaczenie składa się z dwóch
części, nazwy urządzenia i adresu urządzenia:
Przykłady urządzeń:
Szczegółowy opis dostępnych urządzeń - zob. Rozdział 4.
Określone urządzenie identyfikowane jest za pomocą swojego adresu. Na przykład, ponieważ
każdy sterownik ma wiele wejść, w celu odczytania określonego wejścia, musi zostać wyspecyfi-
kowana zarówno nazwa urządzenia, jak i kolejny adres.
Podręcznik dla początkujących
3 – 1
Wstęp do programowania
Struktura instrukcji programu
X0
Urządzenie
Instrukcja
AND X0
Urządzenie
Instrukcja
X 0
Adres urządzenia
Nazwa urządzenia
Nazwa urządzenia
Typ
Funkcja
X
Wejście
Zacisk wejściowy na PLC (np. podłączony do wyłącznika)
Y
Wyjście
Zacisk wyjściowy na PLC (np. do stycznika lub lampki)
M
Przekaźnik
Pamięć buforowa w PLC, która może przyjmować dwa stany, ON lub OFF
T
Licznik czasu
“Przekaźnik czasowy” może być używany do tworzenia funkcji czasowych
C
Licznik
Licznik używany jest do zliczania impulsów dwustanowych
D
Rejestr danych
Pamięć danych w PLC, w której można przechowywać takie rzeczy, jak
mierzone wartości i wyniki obliczeń.
3.2
Bity, bajty i słowa
Tak jak w całej technice cyfrowej, najmniejszą jednostką informacji w PLC jest “bit”. Bit może przy-
mować tylko dwa stany: “0” (OFF lub FAŁSZ) i “1” (ON lub PRAWDA). Sterowniki PLC mają wiele tak
zwanych urządzeń bitowych, które mogą przyjmować tylko dwa stany, włączając w to wejścia,
wyjścia i przekaźniki.
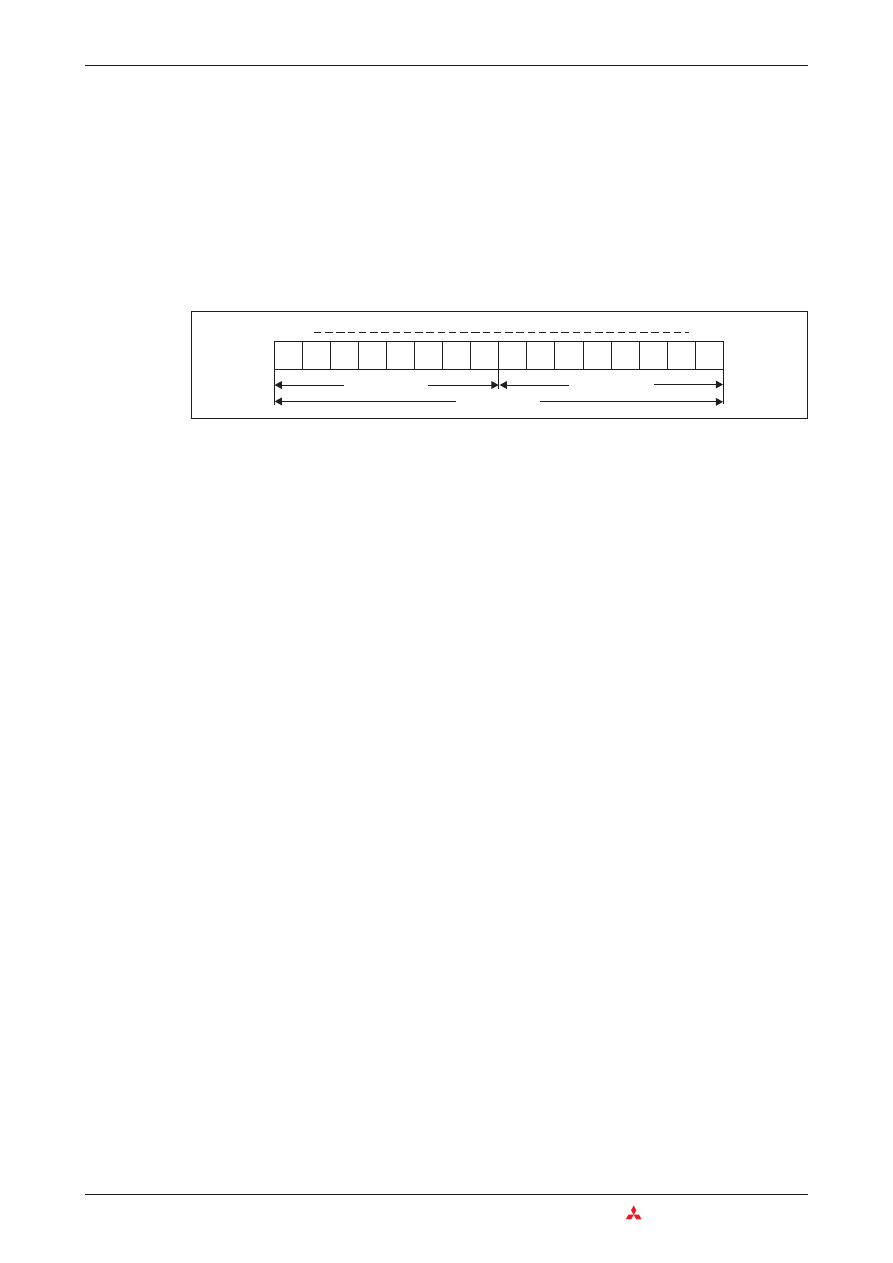
Następną, większą jednostka informacji jest “bajt”, który składa się z 8 bitów, oraz “słowo”, które
zawiera dwa bajty. W sterownikach PLC z rodziny MELSEC FX, rejestry danych są urządzeniami typu
“słowo”, co oznacza, że mogą przechowywać wartości 16-bitowe.
Ponieważ rejestry danych mają długość 16 bitów, mogą przechowywać wartości ze znakiem od -32
768 do +32 767 (zob. Rozdział 3.3). Gdy istnieje potrzeba zapisania większej wartości, wówczas dwa
słowa łączone są ze sobą, tworząc słowo o długości 32-bitów, które może przechowywać wartości
ze znakiem z przedziału od -2 147 483 648 do +2 147 483 647. Na przykład tę możliwość mają liczniki.
3.3
Systemy liczbowe
PLC z rodziny MELSEC FX używają kilku różnych systemów liczbowych do wprowadzania i
wyświetlania wartości oraz do określania adresów urządzeń.
Liczby dziesiętne
System liczb dziesiętnych jest to system powszechnie używany w życiu codziennym. Jest to system
pozycyjny o podstawie 10, w którym każda cyfra (pozycja) w liczbie, ma dziesięć razy większą wart-
ość od liczby z jej prawej strony. Gdy zliczenia na poszczególnych pozycjach osiągną wartość 9,
liczba na pozycji bieżącej powraca do 0, a następna pozycja zwiększana jest o 1, wskazując następną
dekadę (9
à 10, 99 à 100, 999 à 1,000 itd.).
–
Podstawa: 10
–
Cyfry: 0, 1, 2, 3, 4, 5, 6, 7, 8, 9
W rodzinie sterowników PLC MELSEC FX liczby dziesiętne używane są do wprowadzania stałych
oraz wartości nastawy dla timerów i liczników. Adresy urządzeń wprowadzane są również w for-
macie dziesiętnym, za wyjątkiem adresów wejść i wyjść.
Liczby dwójkowe
Tak jak we wszystkich komputerach, PLC mogą rozróżniać tylko dwa stany, ON/OFF lub 0/1. Te
“stany dwójkowe” przechowywane są w pojedynczych bitach. Gdy wymagany jest odczyt lub
wprowadzenie liczb w innych formatach, program narzędziowy automatycznie przetwarza liczby
dwójkowe na inne systemy liczbowe.
–
Podstawa: 2
–
Cyfry: 0 i 1
3 – 2
MITSUBISHI ELECTRIC
Bity, bajty i słowa
Wstęp do programowania
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
1 bajt
1 bajt
1 słowo
Bit 15
Bit 0
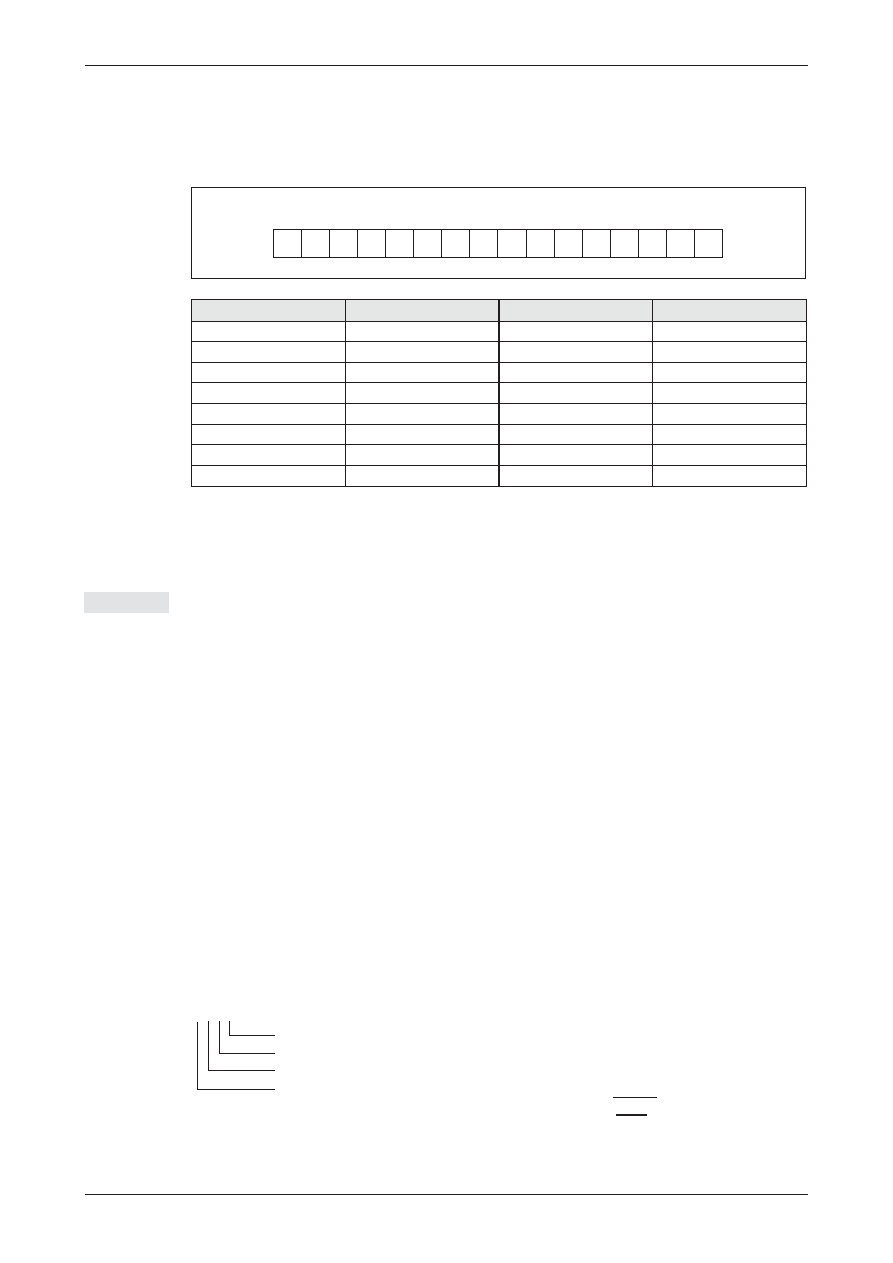
Gdy liczby dwójkowe przechowywane są w słowie (patrz poniżej), wartość każdej z osobna liczby
(pozycji) w słowie, jest 2 do 1-szej potęgi razy większa, niż cyfra z jej prawej strony. Zasada ta jest
dokładnie taka sama, jak w przypadku reprezentacji dziesiętnej, lecz z przyrostem wartości 2
zamiast 10 (patrz ilustracja):
*
W liczbach dwójkowych bit 15-ty używany jest do wyrażenia znaku (bit 15=0: wartość dodatnia, bit 15=1: wartość ujemna)
W celu przekształcenia wartości dwójkowej na wartość dziesiętną, należy pomnożyć każdą liczbę z
wartością 1 przez 2 do potęgi odpowiadającej jej pozycji, i obliczyć sumę.
Przykład
00000010 00011001 (dwójkowa)
00000010 00011001 (dwójkowa) = 1 x 2
9
+ 1 x 2
4
+ 1 x 2
3
+ 1 x 2
0
00000010 00011001 (dwójkowa) = 512 + 16 + 8 + 1
00000010 00011001 (dwójkowa) = 537 (dziesiętna)
Liczby szesnastkowe
Liczby szesnastkowe są prostsze w obsłudze niż dwójkowe, ponadto bardzo łatwo można prze-
kształcić liczby dwójkowe na postać szesnastkową. Dlatego liczby szesnastkowe tak często używ-
ane są w technice cyfrowej i programowalnych sterownikach logicznych. W sterownikach z rodziny
MELSEC FX, liczby szesnastkowe używane są do przedstawiania stałych. W podręczniku program-
owania i innych podręcznikach, celem uniknięcia pomyłki, liczby szesnastkowe są zawsze identyfi-
kowane literą H umieszczoną po liczbie (np. 12345H).
–
Podstawa: 16
–
Cyfry: 0, 1, 2, 3, 4, 5, 6, 7, 8, 9, A, B, C, D, E, F (litery A, B, C, D, E i F przedstawiają wartości dziesiętne
10, 11, 12, 13, 14 i 15)
Szesnastkowy system liczbowy działa w taki sam sposób jak system dziesiętny - zliczanie odbywa się
do FH (15) zamiast do 9, po czym cyfra jest zerowana a następna inkrementowana (FH
à 10H, 1FH à
20H, 2FH
à 30H, FFH à 100H itd.). Wartość cyfry jest potęgą 16 zamiast potęgą10:
Podręcznik dla początkujących
3 – 3
Wstęp do programowania
Systemy liczbowe
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
2
0
2
1
2
2
2
3
2
4
2
5
2
6
2
7
2
8
2
9
2
10
2
11
2
12
2
13
2
14
2
15
Notacja dwójkowa
Wartość dziesiętna
Notacja dwójkowa
Wartość dziesiętna
2
0
1
2
8
256
2
1
2
2
9
512
2
2
4
2
10
1024
2
3
8
2
11
2048
2
4
16
2
12
4096
2
5
32
2
13
8192
2
6
64
2
14
16384
2
7
128
2
15
32768*
1A7F
H
16
0
= 1
(w tym przykładzie: 15 x 1
= 15)
16
1
= 16
(w tym przykładzie: 7 x 16
= 112)
16
2
= 256
(w tym przykładzie: 10 x 256
= 2560)
16
3
= 4096
(w tym przykładzie: 1 x 4096
= 4096)
6783 (dziesiętnie)
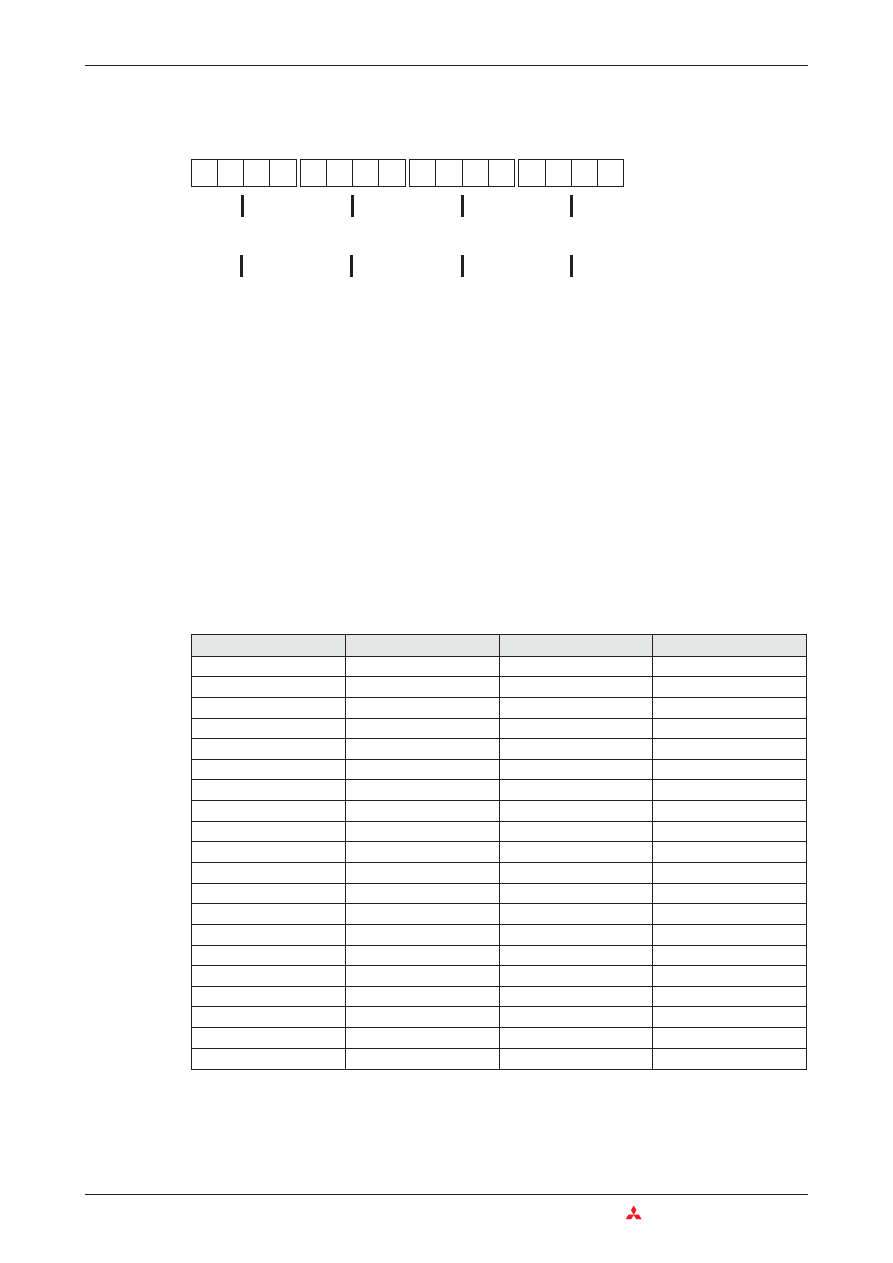
Następujący przykład ilustruje, dlaczego tak łatwo przekształcić wartości dwójkowe na wartości
szesnastkowe:
*
Przekształcenie 4-bitowych bloków na wartości dziesiętne produkuje pośrednio wartość, która odpowiada całkowitej
16-bitowej wartości dwójkowej! W przeciwieństwie do tego, wartość dwójkowa może być przekształcona bezpośrednio
na postać szesnastkową, zachowując dokładnie tę samą wartość, co wartość dwójkowa.
Liczby ósemkowe
Wejścia X8 i X9 oraz wyjścia Y8 i Y9, nie występują w jednostce centralnej rodziny MELSEC FX. Jest tak
dlatego, ponieważ wejścia i wyjścia PLC MELSEC FX numerowane są za pomocą liczb systemu óse-
mkowego, w którym nie występują cyfry 8 i 9. Tutaj zerowanie bieżącej cyfry i inkrementacja cyfry
będącej na kolejnej pozycji, następuje po osiągnięciu wartości 7 (0 – 7, 10 – 17, 70 – 77, 100 – 107 itd.).
–
Podstawa: 8
–
Cyfry: 0, 1, 2, 3, 4, 5, 6, 7
Podsumowanie
Następująca tabela daje przegląd czterech różnych systemów liczbowych:
3 – 4
MITSUBISHI ELECTRIC
Systemy liczbowe
Wstęp do programowania
Notacja dziesiętna
Notacja ósemkowa
Notacja szesnastkowa
Notacja dwójkowa
0
0
0
0000 0000 0000 0000
1
1
1
0000 0000 0000 0001
2
2
2
0000 0000 0000 0010
3
3
3
0000 0000 0000 0011
4
4
4
0000 0000 0000 0100
5
5
5
0000 0000 0000 0101
6
6
6
0000 0000 0000 0110
7
7
7
0000 0000 0000 0111
8
10
8
0000 0000 0000 1000
9
11
9
0000 0000 0000 1001
10
12
A
0000 0000 0000 1010
11
13
B
0000 0000 0000 1011
12
14
C
0000 0000 0000 1100
13
15
D
0000 0000 0000 1101
14
16
E
0000 0000 0000 1110
15
17
F
0000 0000 0000 1111
16
20
10
0000 0000 0001 0000
:
:
:
:
99
143
63
0000 0000 0110 0011
:
:
:
:
Postać dwójkowa
Postać dziesiętna*
Postać szesnastkowa
1
1
1
1
0
1
1
0
1
0
1
1
0
0
1
1
15
5
11
9
F
5
B
9
3.4
Zestaw instrukcji podstawowych
Instrukcje występujące w rodzinie sterowników PLC MELSEC FX można podzielić na dwie podstaw-
owe kategorie: instrukcje podstawowe i instrukcje użytkowe, nazywane czasami “instrukcje aplik-
acyjne” lub “instrukcje użytkowe”.
Funkcje wykonywane przez instrukcje podstawowe porównywalne są do funkcji uzyskiwanych w
sterownikach starszego typu, programowanych przez fizyczne połączenie przewodów. Wszystkie
sterowniki rodziny MELSEC FX wykorzystują instrukcje z zestawu instrukcji podstawowych, natomiast
instrukcje użytkowe obsługiwane są w różnym stopniu, zależnie od modelu PLC (zob. Rozdział 5).
Krótki przegląd zestawu instrukcji podstawowych
Podręcznik dla początkujących
3 – 5
Wstęp do programowania
Zestaw instrukcji podstawowych
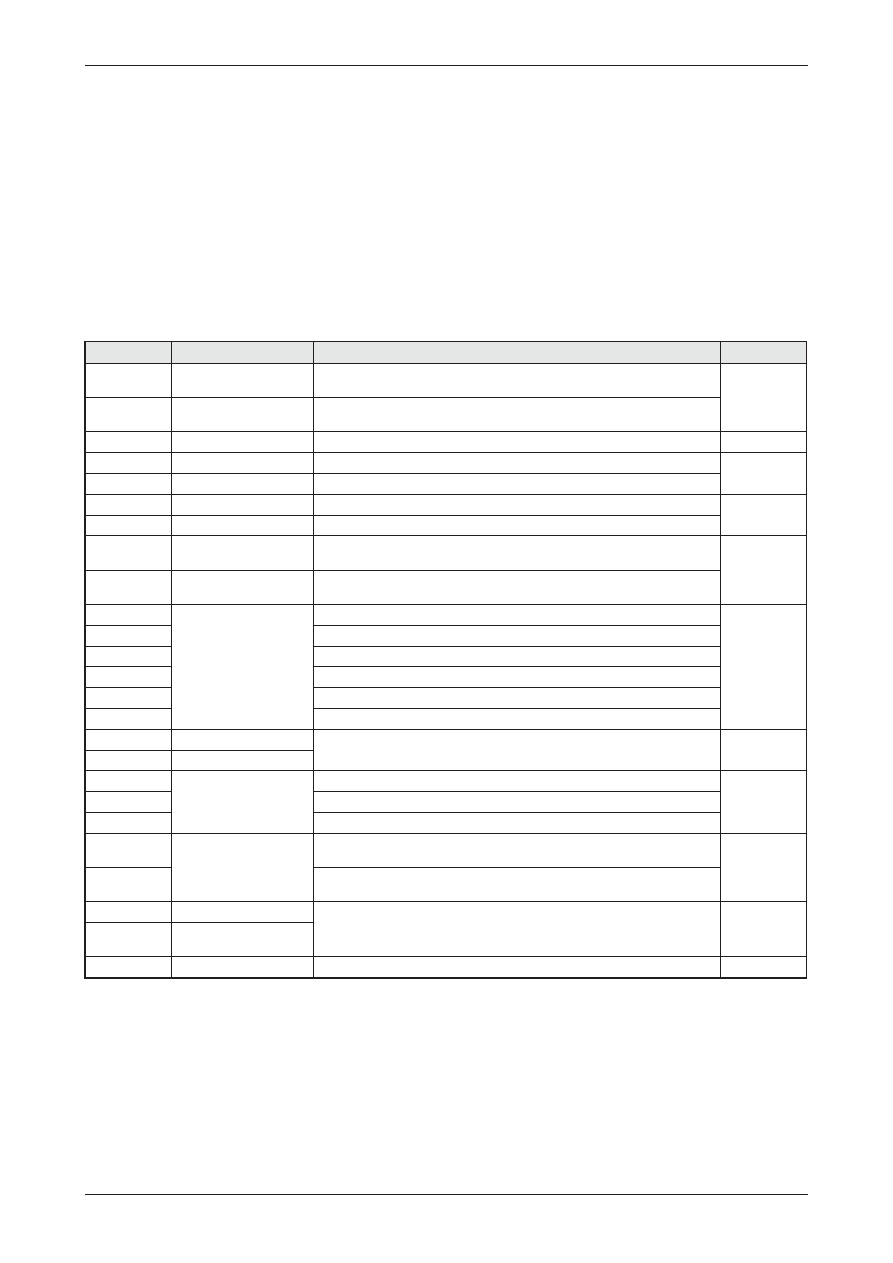
Instrukcja
Funkcja
Opis
Odniesienie
LD
Ładuje
Początkowa operacja logiczna, wybierana stanem logicznym „1” (styk
normalnie otwarty)
Rozdział 3.4.1
LDI
Ładuje negację
Początkowa operacja logiczna, wybierana stanem logicznym „0” (styk
normalnie zamknięty)
OUT
Instrukcja wyjściowa
Przydziela wynik operacji logicznej do urządzenia
Rozdział 3.4.2
AND
LogicznyAND
Operacja logiczna AND, wybierana stanem logicznym „1”
Rozdział 3.4.4
ANI
Negacja AND
Operacja logiczna AND NOT, wybierana stanem logicznym „0”
OR
Logiczny OR
Operacja logiczna OR, wybierana stanem logicznym „1”
Rozdział 3.4.5
ORI
Negacja OR
Operacja logiczna OR NOT, wybierana stanem logicznym „0”
ANB
Blokowy AND
Łączy szeregowo blok obwodów równoległych z poprzednim blokiem
równoległym.
Rozdział 3.4.6
ORB
Blokowy OR
Łączy równolegle blok obwodów szeregowych z poprzednim blokiem
szeregowym.
LDP
Instrukcje wykonywane
impulsowo
Load Pulse, ładuje impuls przy narastającym zboczu sygnału z urządzenia
Rozdział 3.4.7
LDF
Load Falling Pulse, ładuje impuls przy opadającym zboczu sygnału z urządzenia
ANDP
AND Pulse, logiczny AND na narastającym zboczu sygnału z urządzenia
ANDF
ND Pulse, logiczny AND na opadającym zboczu sygnału z urządzenia
ORP
OR Pulse, logiczny OR na narastającym zboczu sygnału z urządzenia
ORF
OR Falling Pulse, logiczny OR na opadającym zboczu sygnału z urządzenia
SET
Ustawia urządzenie
Ustawia stan urządzenia, który zostaje zachowany nawet po tym, gdy warunek
wejściowy nie jest już prawdą
Chapter 3.4.8
RST
Kasuje urządzenie
MPS
Wpisuje, odczytuje i
kasuje pośrednie wyniki
operacji
Memory Point Store, wpisuje do stosu wynik działania
Rozdział 3.4.9
MRD
Memory Read, odczytuje ze stosu i zachowuje na stosie wynik operacji
MPP
Memory POP, odczytuje zapisany na stosie wynik operacji i usuwa go ze stosu
PLS
Instrukcje wykonywane
impulsowo
Pulse, na narastającym zboczu warunku wejściowego, ustawia urządzenie na
czas jednego cyklu programu
Rozdział 3.4.10
PLF
Pulse Falling, na opadającym zboczu warunku wejściowego, ustawia
urządzenie* na czas jednego cyklu programu
MC
Sterowanie nadrzędne
Instrukcje do aktywacji lub dezaktywacji określonej części programu
Rozdział 3.4.11
MCR
Kasuje sterowanie
nadrzędne
INV
Odwraca
Odwraca wynik działania
Rozdział 3.4.12
3.4.1
Początkowe operacje logiczne
Obwód programu zaczyna się zawsze od instrukcji LD- lub LDI. Instrukcje te mogą być wykonywane
na wejściach, przekaźnikach, timerach i licznikach.
Przykłady użycia tych instrukcji można zobaczyć w następnym dziale w opisie instrukcji OUT.
3.4.2
Wyprowadzenie wyniku operacji logicznej
Instrukcja OUT może być użyta do zakończenia obwodu. Można również zaprogramować obwody,
które jako wyniku używają wielokrotnych instrukcji OUT. Jednak nie jest konieczne zakończenie
programu. Ustawione urządzenie, używające instrukcji OUT jako wyniku działania, może być użyte
w kolejnych krokach programu jako sygnał wejściowy.
Przykład (instrukcje LD i OUT)
Wynik działania tych dwóch instrukcji w następującej sekwencji sygnałów:
3 – 6
MITSUBISHI ELECTRIC
Zestaw instrukcji podstawowych
Wstęp do programowania
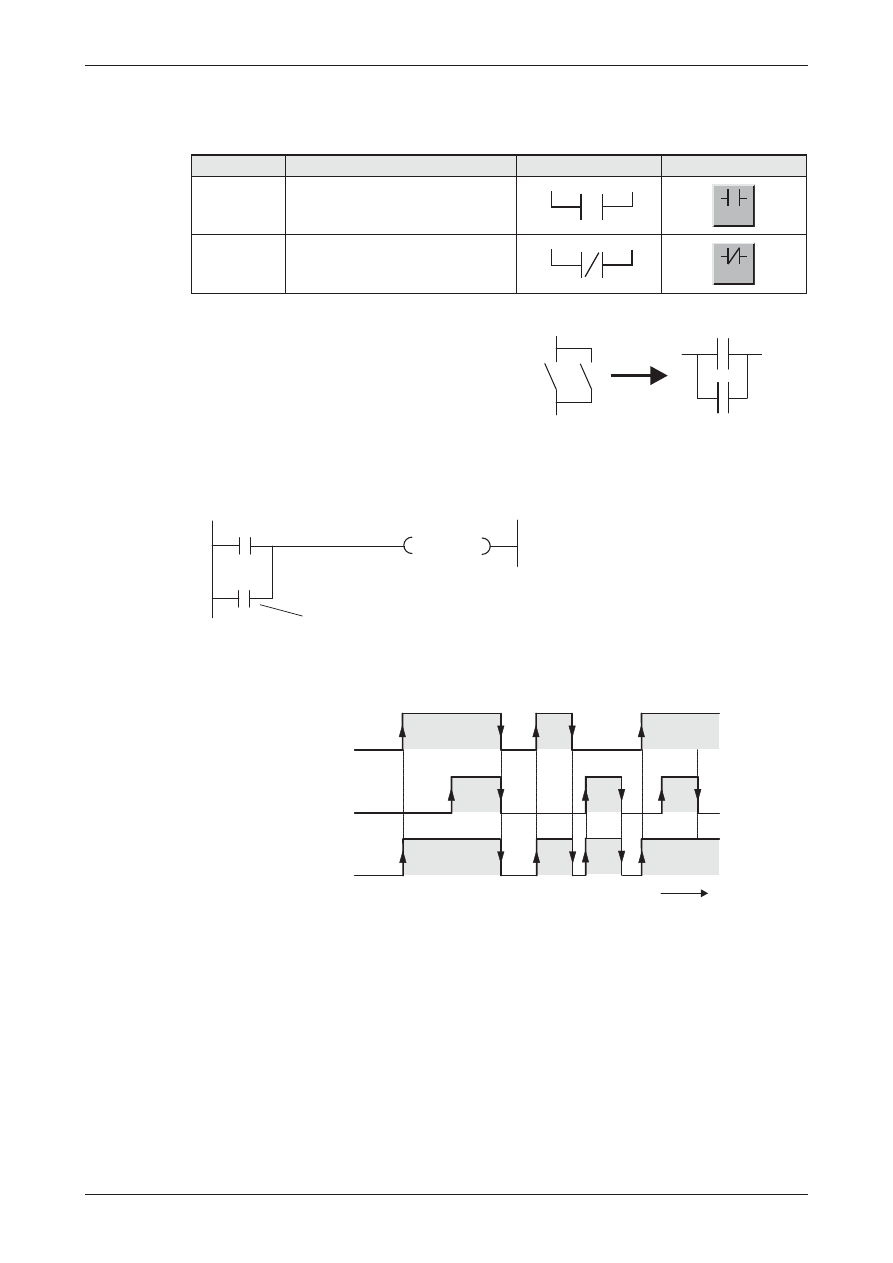
Funkcja
Symbol
GX Developer FX
OUT
Instrukcja wyjścia, przenosi wynik operacji
do urządzenia
X000
0
Y000
Schemat drabinkowy
Lista instrukcji
0
LD
X000
1
OUT
Y000
Y0
X0
OFF
ON
OFF
ON
t
(0)
(1)
(0)
(1)
Warunek instrukcji LD (wybieranej stanem sygnału „1”) jest prawdą, więc wynik działania
jest również prawdą („1”) i wyjście zostaje ustawione.
F5
F6
F7
Instrukcja
Funkcja
Symbol
GX Developer FX
LD
Instrukcja LOAD, rozpoczyna operację
logiczną i przy stanie sygnału „1” wybiera
wyspecyfikowane urządzenie
LDI
Instrukcja LOAD INVERT, rozpoczyna
operację logiczną i przy stanie sygnału „0”
wybiera wyspecyfikowane urządzenie
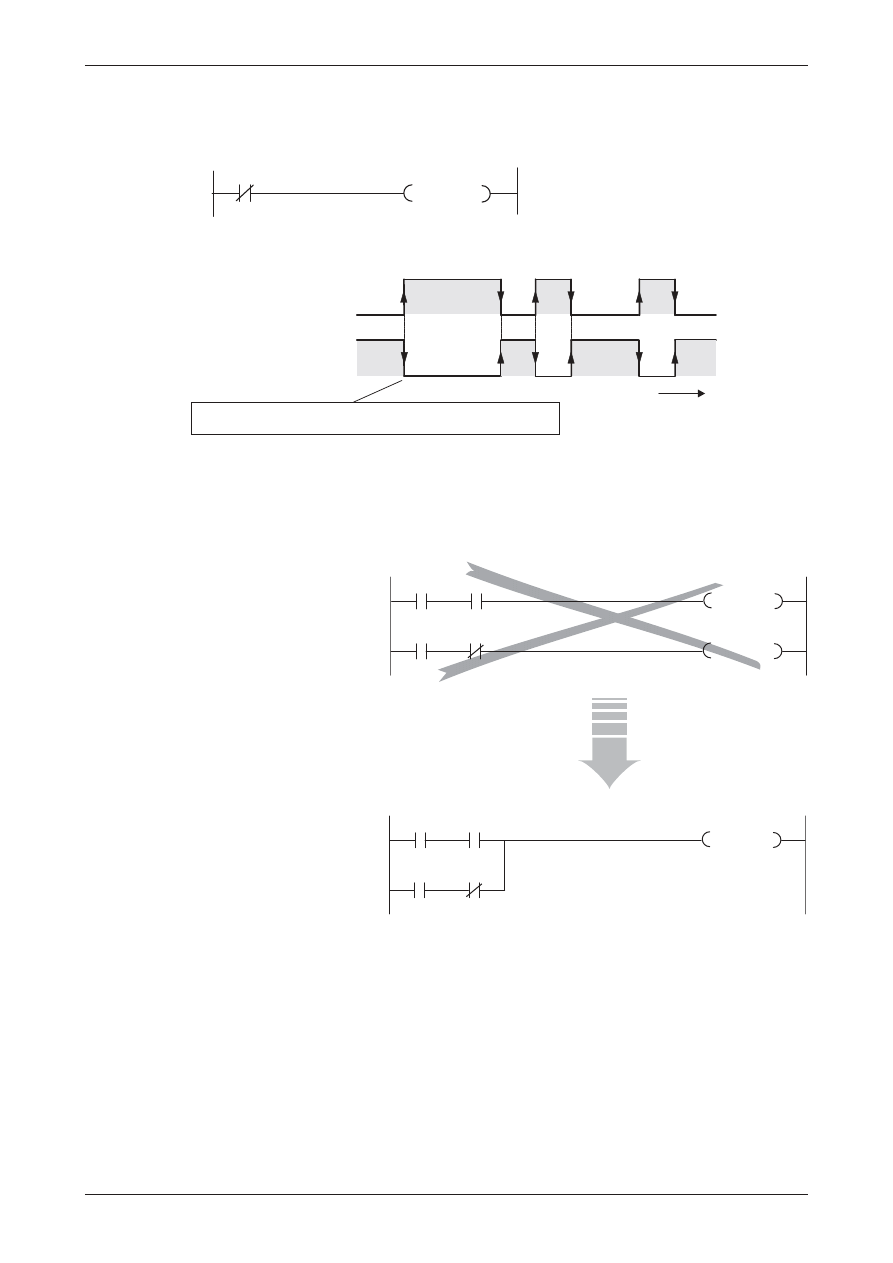
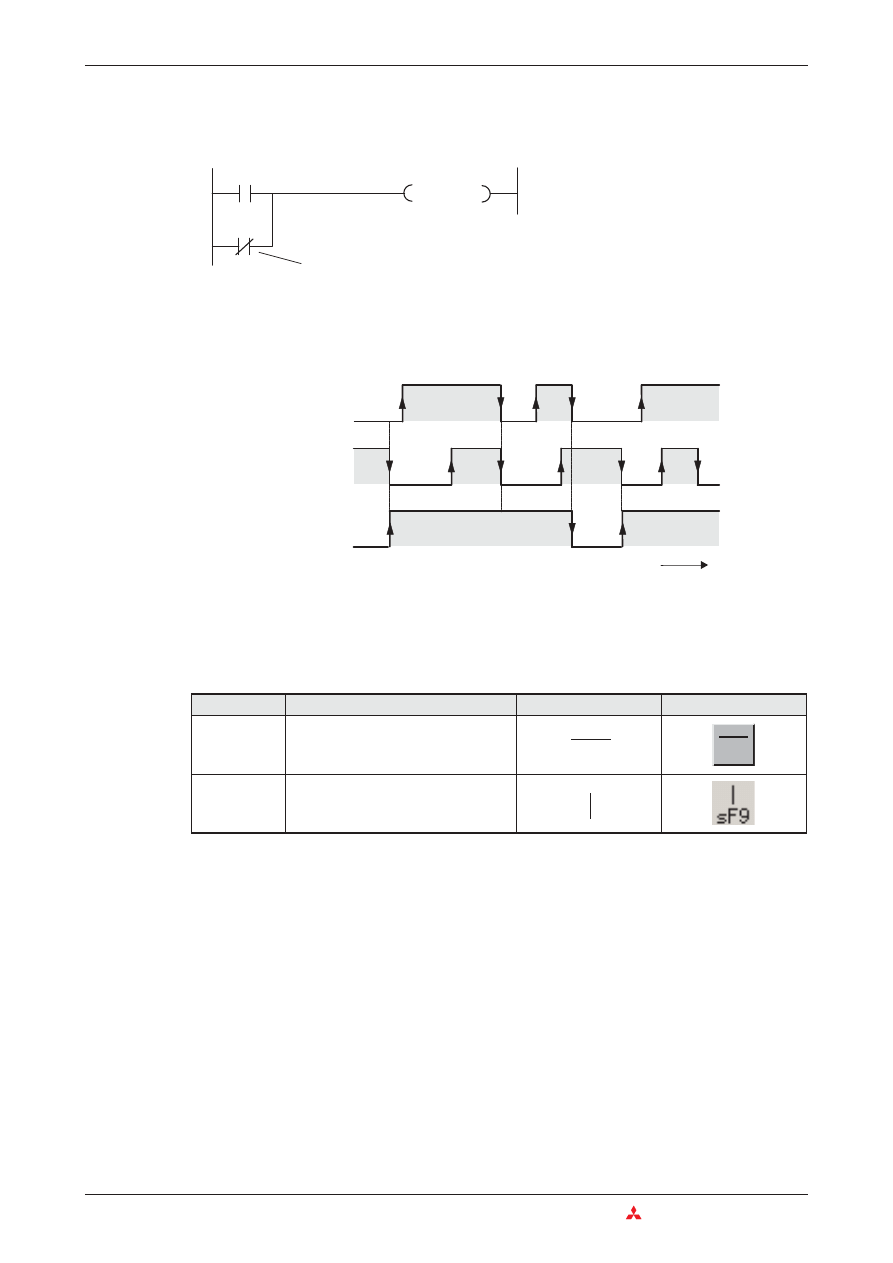
Przykład (instrukcje LDI i OUT)
Podwójne przydzielenie przekaźników lub wyjść
Do tego samego urządzenia nigdy nie należy przydzielać wyniku działania w więcej, niż w jednym
miejscu programu!
Podręcznik dla początkujących
3 – 7
Wstęp do programowania
Zestaw instrukcji podstawowych
X005
X003
M10
X004
X001
Można rozwiązać ten prob-
lem za pomocą modyfikacji
pokazanej z prawej strony.
Tutaj program bierze pod
uwagę wszystkie wymagane
warunki wejściowe i ustawia
poprawnie jeden wynik.
X000
0
Y000
Schemat drabinkowy
Lista instrukcji
0
LDI
X000
1
OUT
Y000
Y0
X0
t
(0)
(1)
(0)
(1)
OFF
ON
OFF
ON
Warunek instrukcji LDI (wybieranej stanem sygnału „0”) nie jest już
prawdą, więc wyjście zostaje wyzerowane.
X005
X003
M10
M10
X004
X001
Program wykonywany jest w
kolejności od góry do dołu,
w i ę c w t y m p r z y k ł a d z i e ,
drugie ustalenie stanu M10,
nadpisze wynik pierwszego
ustalenia.
3.4.3
Używanie wyłączników i czujników
Zanim zaczniemy kontynuowanie dalszej części instrukcji, powinniśmy najpierw wyjaśnić, w jaki sposób
sygnały z wyłączników, czujników i tym podobnych, mogą być używane w naszych programach.
W celu poprawnego wykonania swojej funkcji programy PLC muszą być w stanie zareagować na
sygnały z wyłączników, przycisków i czujników. Ważną rzeczą jest zrozumienie faktu, że instrukcje
programu mogą z określonych wejść tylko zbierać sygnały dwustanowe, niezależnie od typu
wejścia i tego, jak jest sterowane.
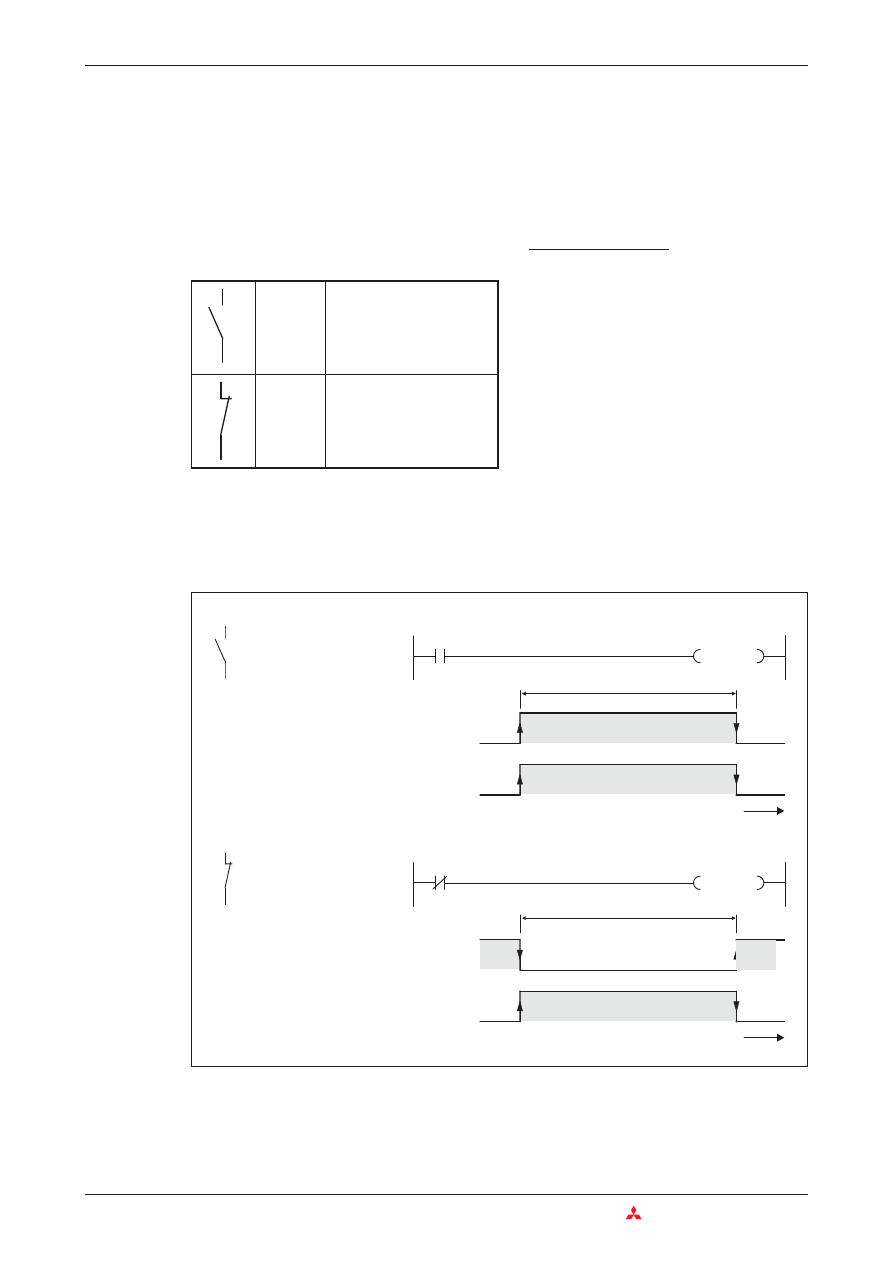
Zazwyczaj używane są wyłączniki normalnie otwarte (zwierne). Czasami jednak, ze względów
bezpieczeństwa, używane są styki rozwierne - na przykład do wyłączania napędów (zob. dział 3.5).
Poniższa ilustracja pokazuje dwie sekwencje programowe, w których wynik jest dokładnie taki sam,
nawet pomimo użycia różnych rodzajów wyłączników: Gdy wyłącznik jest aktywny, wyjście zostaje
ustawione (załączone).
3 – 8
MITSUBISHI ELECTRIC
Zestaw instrukcji podstawowych
Wstęp do programowania
Y000
X000
0
24 V
X0
Y0
X0
OFF
ON
OFF
ON
t
Y000
X000
0
24 V
X0
Y0
X0
OFF
ON
OFF
ON
t
LD X000
OUT Y000
OUT Y000
LDI X000
Przełącznik aktywny
Przełącznik aktywny
Styk
zwierny
Gdy działa styk zwierny, wejście
zostaje ustawione (ON, stan
sygnału „1”)
Styk
rozwierny
Gdy działa styk rozwierny,
wejście zostaje wyzerowane
(OFF, stan sygnału „0”)
P o d c z a s p i s a n i a p r o g r a m u n a l e ż y b y ć
świadomym, czy element podłączony do
wejścia PLC jest urządzeniem zwiernym, czy też
rozwiernym. Wejście podłączone do urządze-
nia zwiernego musi być traktowane inaczej, niż
wejście podłączone do urządzenia rozwier-
nego. Ilustruje to następujący przykład.
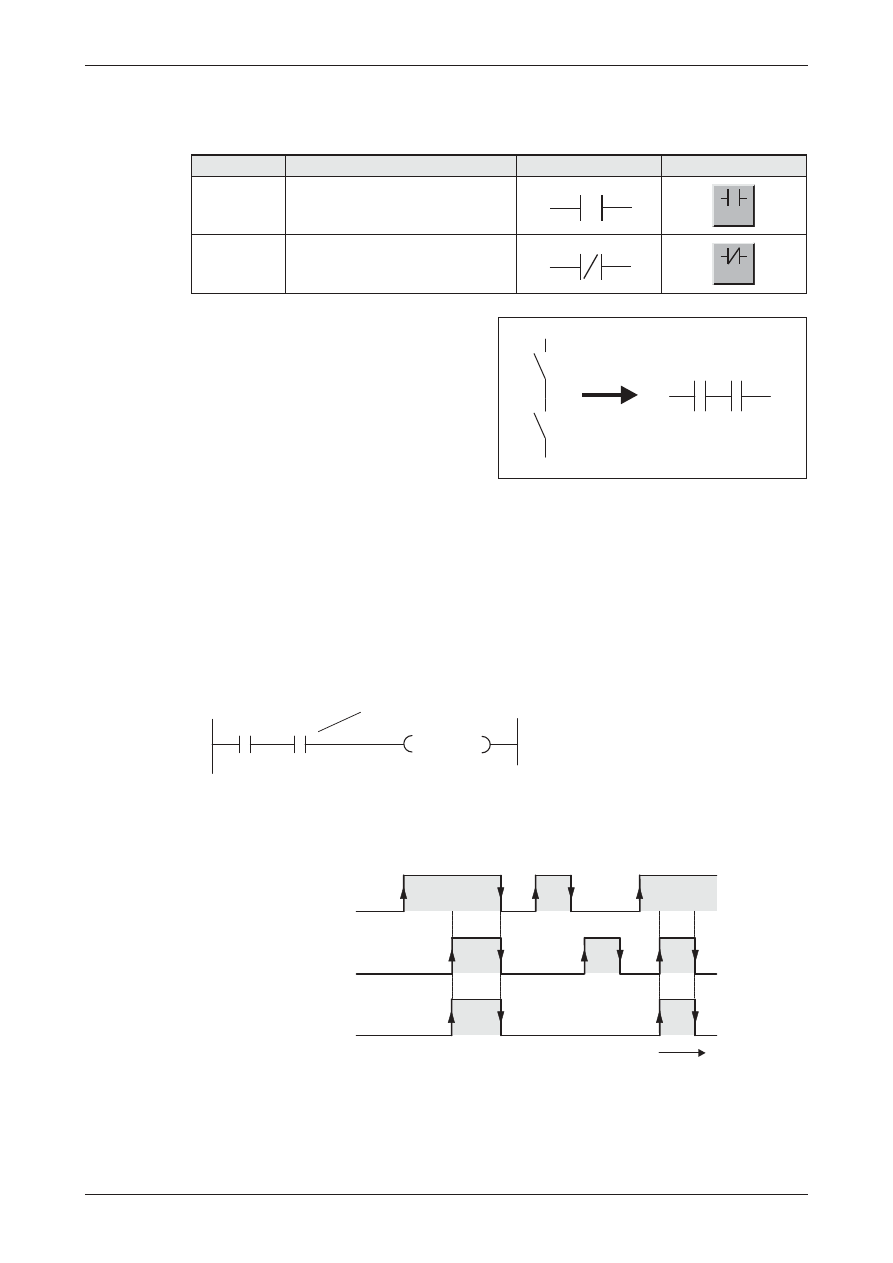
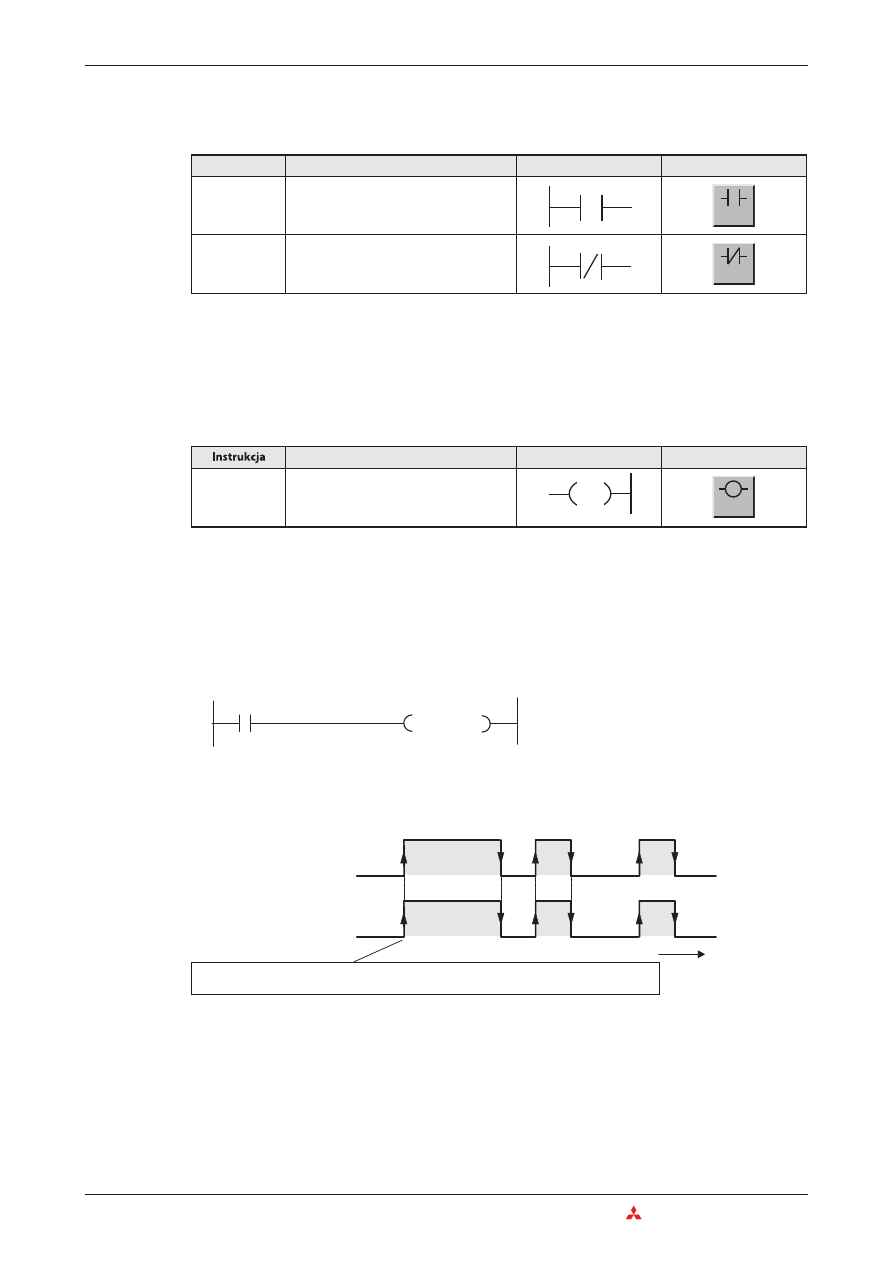
3.4.4
Operacja AND
Należy zwrócić uwagę, że program narzędziowy używa tych samych symboli i klawiszy funkcyjnych
dla instrukcji AND i ANI, jak dla instrukcji LD i LDI. Gdy programowanie odbywa się w formie sche-
matu drabinkowego, w miejscu wstawiania program automatycznie przypisuje poprawne
instrukcje.
Gdy programowanie odbywa się w formie listy instrukcji, należy pamiętać, że na początku
tworzonego obwodu nie można użyć instrukcji AND i ANI (lewa linia w schemacie drabinkowym).
Obwody muszą zaczynać się od instrukcji LD lub LDI (zob. Rozdział 3.4.1).
Przykład instrukcji AND
W przykładzie wyjście Y0 załączane jest wtedy, gdy obydwa wejścia X0 i X1 są załączone:
Podręcznik dla początkujących
3 – 9
Wstęp do programowania
Zestaw instrukcji podstawowych
Instrukcja
Funkcja
Symbol
GX Developer FX
AND
AND logiczny (operacja AND wybierana
stanem sygnału „1” lub ON)
ANI
AND NOT logiczny (operacja AND NOT
wybierana stanem sygnału „0” lub OFF)
Operacja AND jest logicznie tym samym, czym w
obwodzie elektrycznym szeregowe połączenie
dwóch, lub więcej wyłączników. Prąd będzie
płynął tylko wtedy, jeśli wszystkie wyłączniki
zostaną zamknięte. Jeśli jeden wyłącznik, lub
więcej, będzie otwarty, wtedy prąd nie płynie –
warunek AND jest fałszywy.
X000
0
X001
Y000
Schemat drabinkowy
Lista instrukcji
0
LD
X000
1
AND
X001
2
OUT
Y000
Instrukcja AND
Y0
X0
OFF
ON
t
(0)
(1)
(0)
(1)
X1
(0)
(1)
OFF
ON
OFF
ON
F5
F6
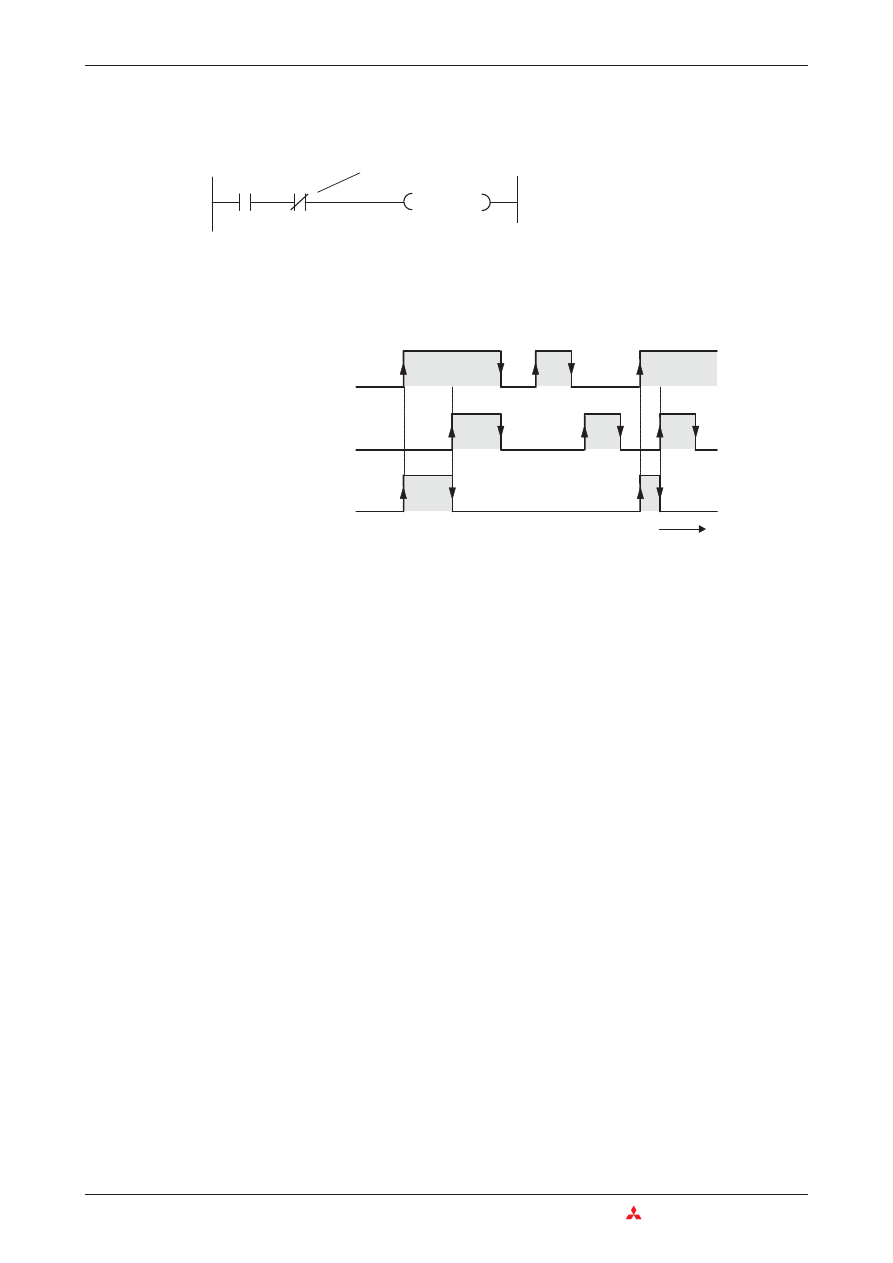
Przykład instrukcji ANI
W przykładzie, wyjście Y0 załączane jest tylko wtedy, gdy włączone jest wejście X0 i wyłączone jest
wejście X1:
3 – 10
MITSUBISHI ELECTRIC
Zestaw instrukcji podstawowych
Wstęp do programowania
Y0
X0
t
(0)
(1)
(0)
(1)
X1
(0)
(1)
OFF
ON
OFF
ON
OFF
ON
X000
0
X001
Y000
0
LD
X000
1
ANI
X001
2
OUT
Y000
Lista instrukcji
Schemat drabinkowy
Instrukcja ANI
3.4.5
Operacja OR
Przykład instrukcji OR
W przykładzie, wyjście Y0 załączane jest wtedy, gdy włączone jest albo wejście X0, albo wejście X1:
Podręcznik dla początkujących
3 – 11
Wstęp do programowania
Zestaw instrukcji podstawowych
Instrukcja
Funkcja
Symbol
GX Developer FX
OR
OR logiczny (operacja OR wybierana stanem
sygnału „1” lub ON)
ORI
OR NOT logiczny (operacja OR NOT
wybierana stanem sygnału „0” lub OFF)
Operacja OR jest logicznie tym samym, czym w
obwodzie elektrycznym równoległe połączenie
dwóch, lub więcej wyłączników. Tak długo, jak
długo którykolwiek z wyłączników pozostaje
zamknięty, prąd będzie płynął. Prąd przestanie
płynąć tylko wtedy, gdy wszystkie wyłączniki
zostaną otwarte.
X000
0
X001
Y000
0
LD
X000
1
OR
X001
2
OUT
Y000
Lista instrukcji
Schemat drabinkowy
Instrukcja OR
Y0
X0
t
(0)
(1)
(0)
(1)
X1
(0)
(1)
OFF
ON
OFF
ON
OFF
ON
F5
F6
Przykład instrukcji ORI
W przykładzie, wyjście Y0 załączane jest wtedy, gdy włączone jest albo wejście X0, albo wyłączone
jest wejście X1:
3.4.6
Instrukcje do łączenia operacji na blokach
Pomimo tego, że ANB oraz ORB są instrukcjami PLC, w programie drabinkowym są tylko
wprowadzane i wyświetlane jako linie łączące. Pokazywane są tylko jako instrukcje w formacie listy
instrukcji, gdzie muszą być wprowadzone wraz ze swoimi skrótami ANB i ORB.
Obydwie instrukcje wprowadzane są bez urządzeń i mogą być używane tyle razy, ile razy jest to
potrzebne. Jednak maksymalna liczba instrukcji LD i LDI jest ograniczona do 8, co efektywnie ogran-
icza również liczbę instrukcji ORB lub ANB, jaką można użyć, zanim wprowadzane instrukcje także
osiągną 8.
3 – 12
MITSUBISHI ELECTRIC
Zestaw instrukcji podstawowych
Wstęp do programowania
Y0
X0
t
(0)
(1)
(0)
(1)
X1
(0)
(1)
OFF
ON
OFF
ON
OFF
ON
Instrukcja
Funkcja
Symbol
GX Developer FX
ANB
AND blokowy (szeregowe połączenie
bloków, zawierających operacje/obwody
równoległe)
ORB
OR blokowy (równoległe połączenie
bloków, zawierających operacje/obwody
szeregowe)
F9
X000
0
X001
Y000
0
LD
X000
1
ORI
X001
2
OUT
Y000
Lista instrukcji
Schemat drabinkowy
Instrukcja ORI
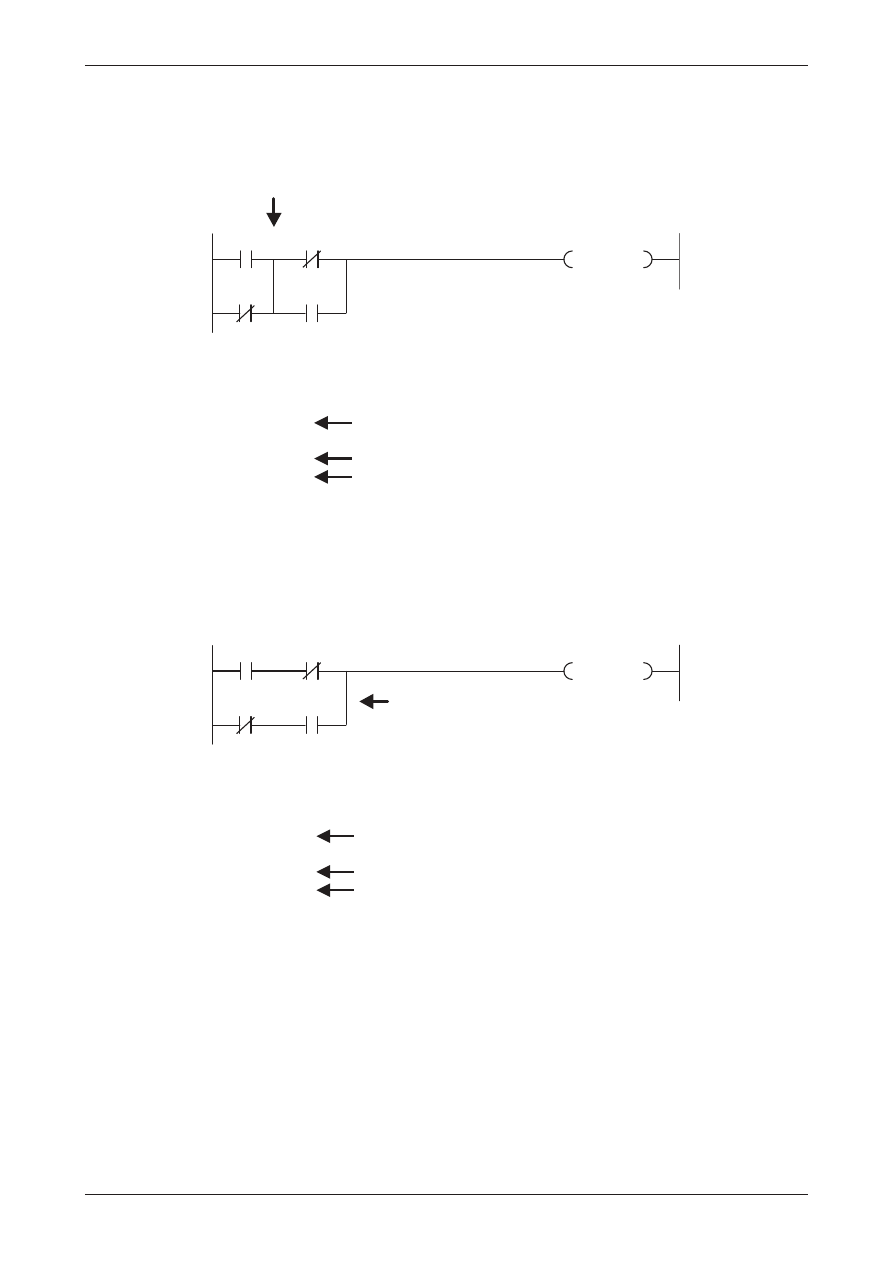
Przykład instrukcji ANB
W tym przykładzie, wyjście Y07 zostanie załączone, jeśli wejście X00 jest “1”, lub jeśli przekaźnik M2
jest “0” i wejście X01 jest “0”, lub jeśli M10 jest “1”.
Przykład instrukcji ORB
W tym przykładzie, wyjście Y07 zostanie załączone, jeśli wejście X00 jest “1”, i wejście X01 jest “0”,
lub jeśli przekaźnik M2 jest “0”, i przekaźnik M10 jest “1”.
Podręcznik dla początkujących
3 – 13
Wstęp do programowania
Zestaw instrukcji podstawowych
0 LD
X000
1 ORI
M2
2 LDI
X001
3 OR
M10
4 ANB
5 OUT
Y007
Lista instrukcji
Schemat drabinkowy
Instrukcja ANB
1-sze połączenie równoległe (operacja OR)
2-gie połączenie równoległe (operacja OR)
Instrukcja ANB łączy obydwie operacje OR
0 LD
X000
1 ANI
X001
2 LDI
M2
3 AND
M10
4 ORB
5 OUT
Y007
Lista instrukcji
Schemat drabinkowy
Instrukcja ORB
1-sze połączenie szeregowe (operacja AND)
2-gie połączenie szeregowe (operacja AND)
Instrukcja ORB łączy obydwie operacje AND
Y007
X000
0
M2
X001
M10
Y007
X000
0
M2
X001
M10
3.4.7
Wykonywanie działań wyzwalanych impulsem
Często w programach PLC konieczna jest detekcja i reakcja na narastające lub opadające zbocze
sygnału przełączającego z urządzeń bitowych. Zbocze narastające oznacza przełączenie urządze-
nia ze stanu “0“ na ”1“, natomiast zbocze opadające oznacza przełączenie z “1“ na ”0“.
W czasie wykonywania programu, działania, które odpowiadają za narastające i opadające impulsy,
wystawiają wartość “1" tylko wtedy, gdy stan sygnału wzmiankowanego urządzenia ulega zmianie.
Kiedy istnieje potrzeba użycia tego sygnału? Przypuśćmy, że mamy przenośnik taśmowy z czujnik-
iem, który uaktywnia się i za każdym razem, gdy pakunek na taśmie przesunie się koło niego,
powodując inkrementację licznika. Jeśli nie zostanie użyta funkcja wyzwalana zboczem, otrzym-
amy niepoprawny wynik, ponieważ licznik będzie inkrementowany w każdym cyklu sterowania, w
którym wyłącznik zostanie zarejestrowany jako załączony. Jeśli zarejestrujemy wyłącznie zbocze
narastające sygnału wyłącznika, licznik będzie inkrementowany poprawnie, zwiększając swój stan
przy każdym pakunku o 1.
Notatka
Większość instrukcji użytkowych może być również wykonywanych w sposób impulsowy. W
sprawie szczegółów patrz rozdział 5.
Impuls od narastającego zbocza sygnału
3 – 14
MITSUBISHI ELECTRIC
Zestaw instrukcji podstawowych
Wstęp do programowania
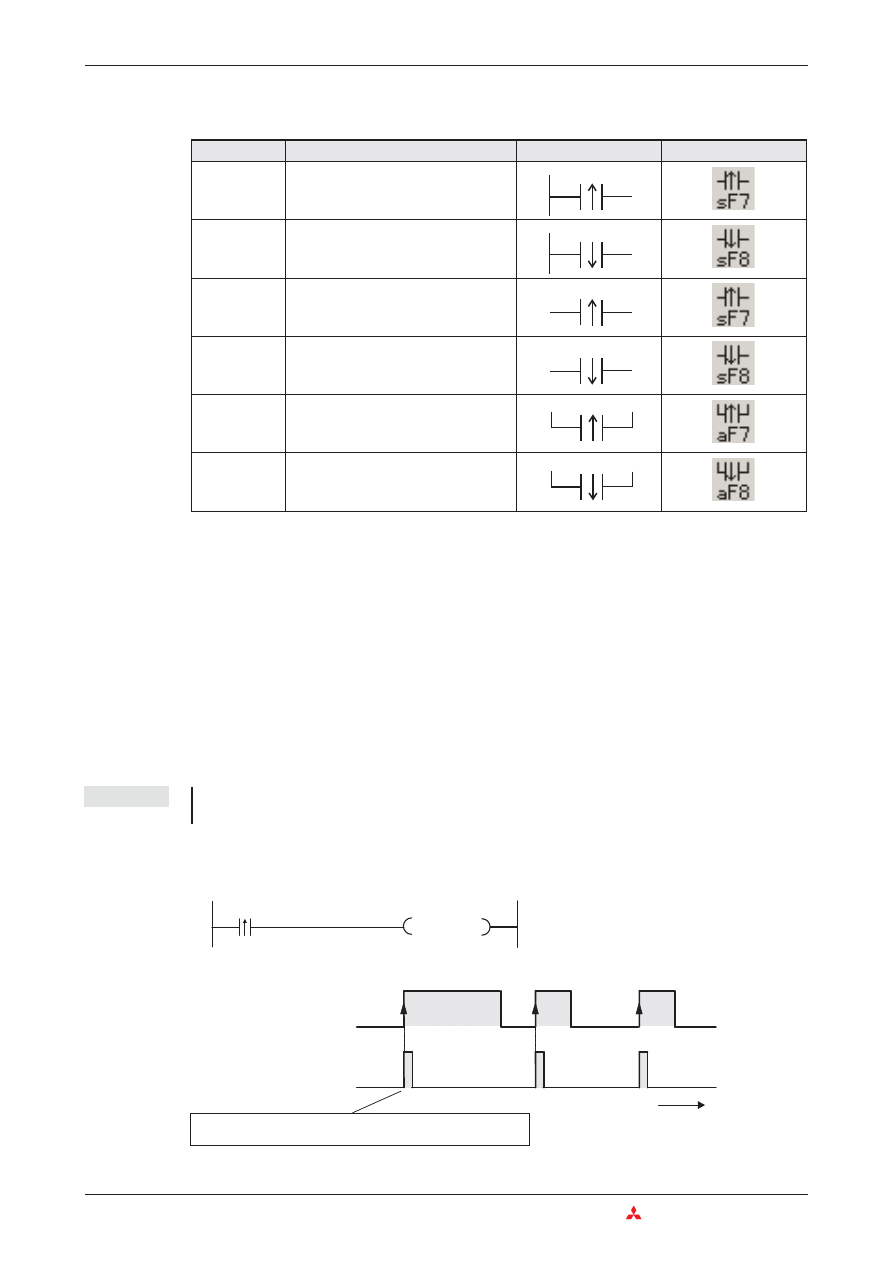
Instrukcja
Funkcja
Symbol
GX Developer FX
LDP
Load Pulse, rozpoczyna i ładuje na
narastającym zboczu sygnału urządzenia
LDF
Load Falling Pulse, rozpoczyna i ładuje na
opadającym zboczu sygnału urządzenia
ANDP
AND Pulse, operacja logicznego AND na
narastającym zboczu sygnału urządzenia
ANDF
AND Falling Pulse, operacja logicznego AND
na opadającym zboczu sygnału urządzenia
ORP
OR Pulse, operacja logicznego OR na
narastającym zboczu sygnału urządzenia
ORF
OR Falling Pulse, operacja logicznego OR na
opadającym zboczu sygnału urządzenia
M0
X001
0
Schemat drabinkowy
Lista instrukcji
0
LDP
X001
1
OUT
M0
M0
X1
OFF
ON
t
(0)
(1)
0
1
Przekaźnik M0 załączany jest tylko na czas trwania pojedynczego
cyklu programu
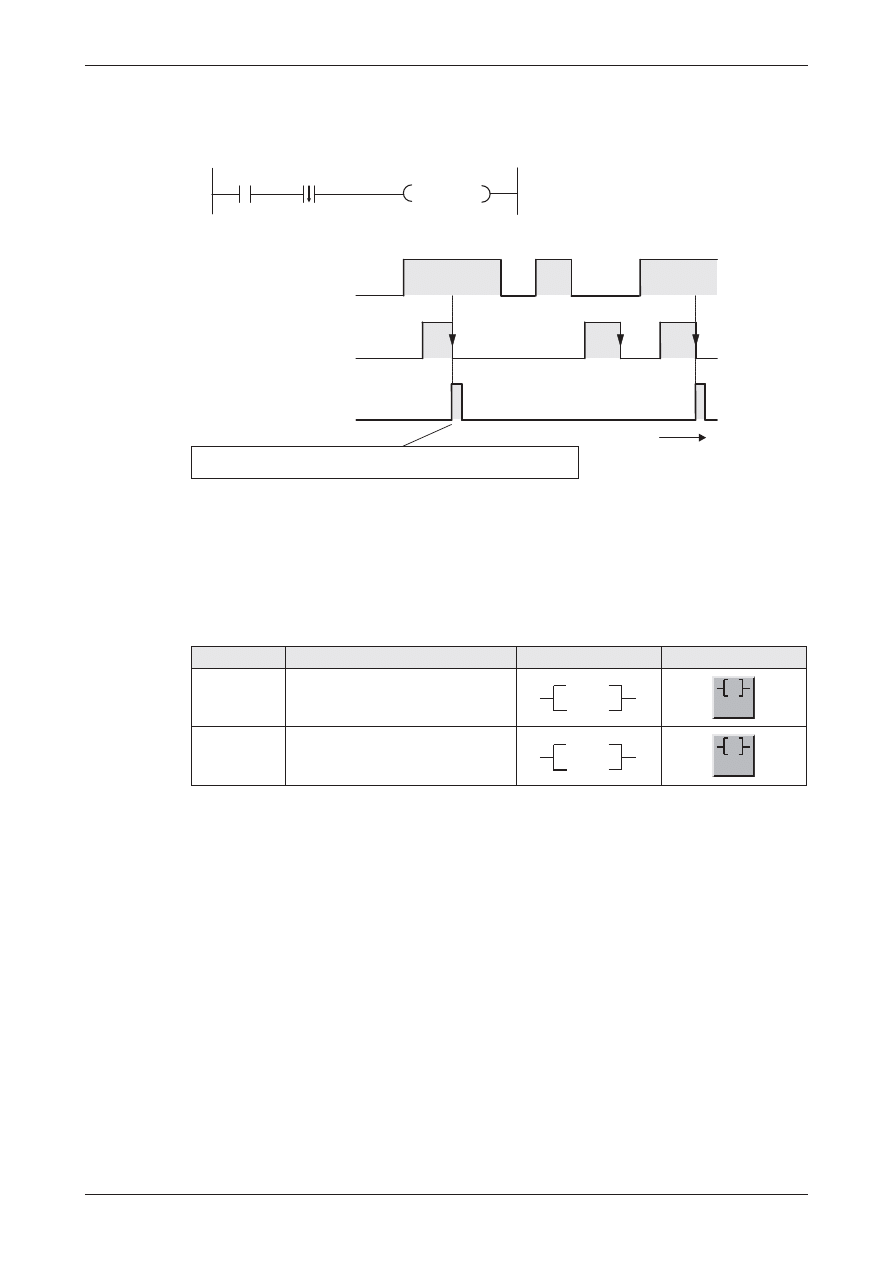
Impuls od opadającego zbocza sygnału
Z wyjątkiem chrakterystyki wyzwalanej impulsowo, funkcje instrukcji LDP, LDF, ANDP, ANDF, ORP i
ORF są identyczne z instrukcjami LD, AND i OR. Oznacza to, że operacje wyzwalane impulsowo mogą
być użyte w programie dokładnie w taki sam sposób, jak instrukcje w wersji konwencjonalnej.
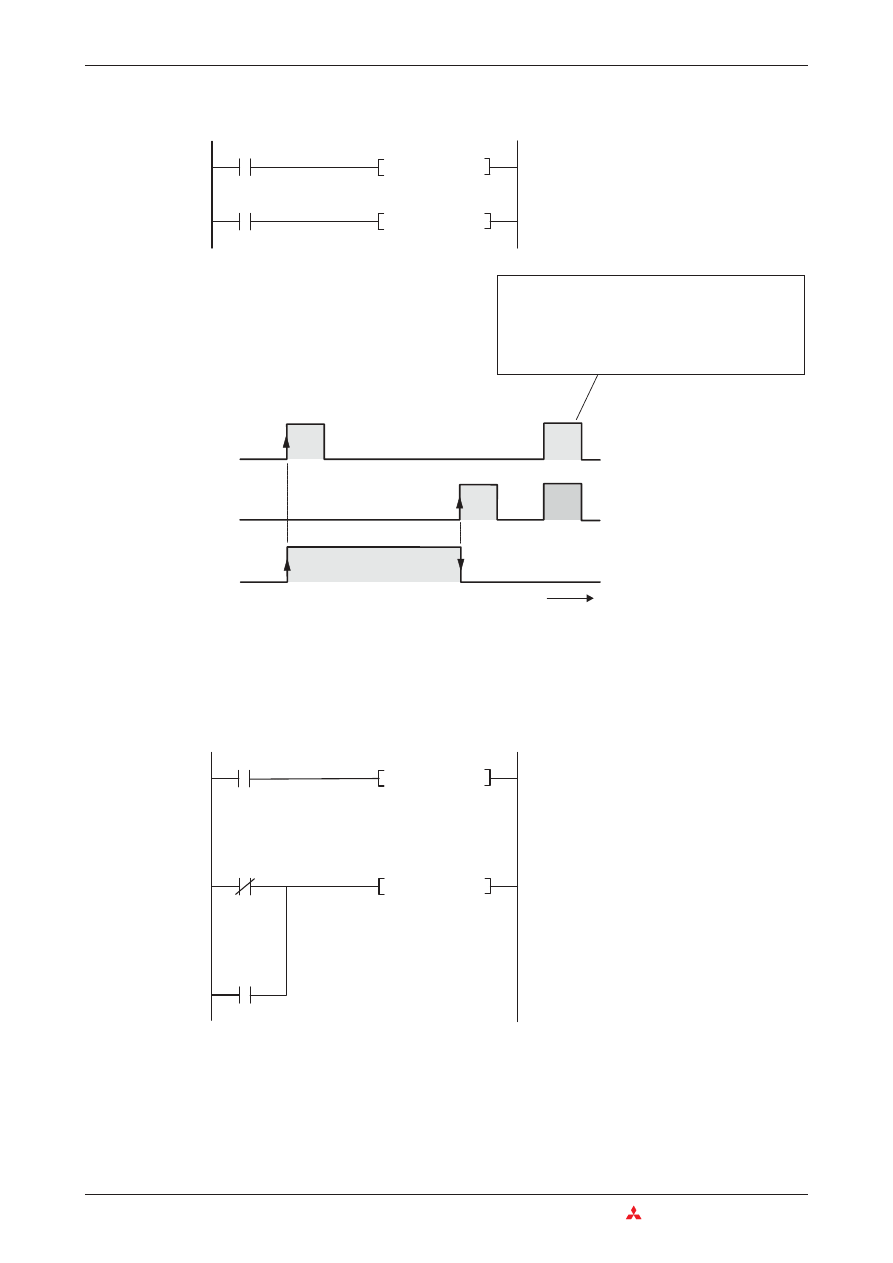
3.4.8
Ustawianie i kasowanie urządzeń
���
Instrukcja SET może być użyta do ustawiania wyjść (Y), przekaźników (M) i przekaźników stanu (S).
���
Instrukcja RST może być użyta do kasowania wyjść (Y), przekaźników (M), przekaźników stanu (S)., timerów (T), liczników
(C) i rejestrów (D, V, Z).
Sygnał wyjściowy instrukcji OUT normalnie pozostaje w stanie “1“ tak długo, jak długo wynik
działania podłączony do instrukcji OUT, traktowany jest jako ”1“. Na przykład, jeśli do wejścia
podłączymy przycisk a do odpowiedniego wyjścia żarówkę oraz połączymy to za pomocą instrukcji
LD i OUT, żarówka pozostanie włączona tylko w czasie, gdy przycisk będzie załączony.
Instrukcja SET może być użyta do przełączenia (ustawienia) wyjścia lub przekaźnika w stan ON przy
pomocy krótkiego impulsu, po czym urządzenie pozostaje w stanie ON. Urządzenie pozostanie
włączone aż do chwili, gdy zostanie wyłączone (skasowane) instrukcją RST. Pozwala to na wprowad-
zenie funkcji zatrzaskowych lub włączanie i wyłączanie napędów za pomocą przycisków. (Gdy PLC
zostanie zatrzymany lub wyłączone napięcie zasilające, zasadniczo wyjścia są również wyłączane.
Jednak niektóre przekaźniki, przy tych warunkach, również zachowują swój ostatni stan - na
przykład ustawiony przekaźnik powinien wtedy pozostać ustawiony.)
Wpisując instrukcję SET lub RST w formacie chematu drabinkowego, należy w programie GX Deve-
loper kliknąć na ikonę pokazaną w powyższej tabeli, lub wcisnąć klawisz F8. Następnie wprowad-
zana jest instrukcja i nazwa urządzenia, które ma być ustawiane lub kasowane, np. SET Y1.
Podręcznik dla początkujących
3 – 15
Wstęp do programowania
Zestaw instrukcji podstawowych
Schemat drabinkowy
Lista instrukcji
0
LD
M235
1
ANDF
X010
2
OUT
M374
M374
M235
X010
0
M374
M235
t
0
1
0
1
X10
OFF
ON
(0)
(1)
Jeśli M235 jest załączony (1) iX10 zostanie wyłączony (0), przekaźnik M374
załączany jest tylko na czas trwania pojedynczego cyklu programu.
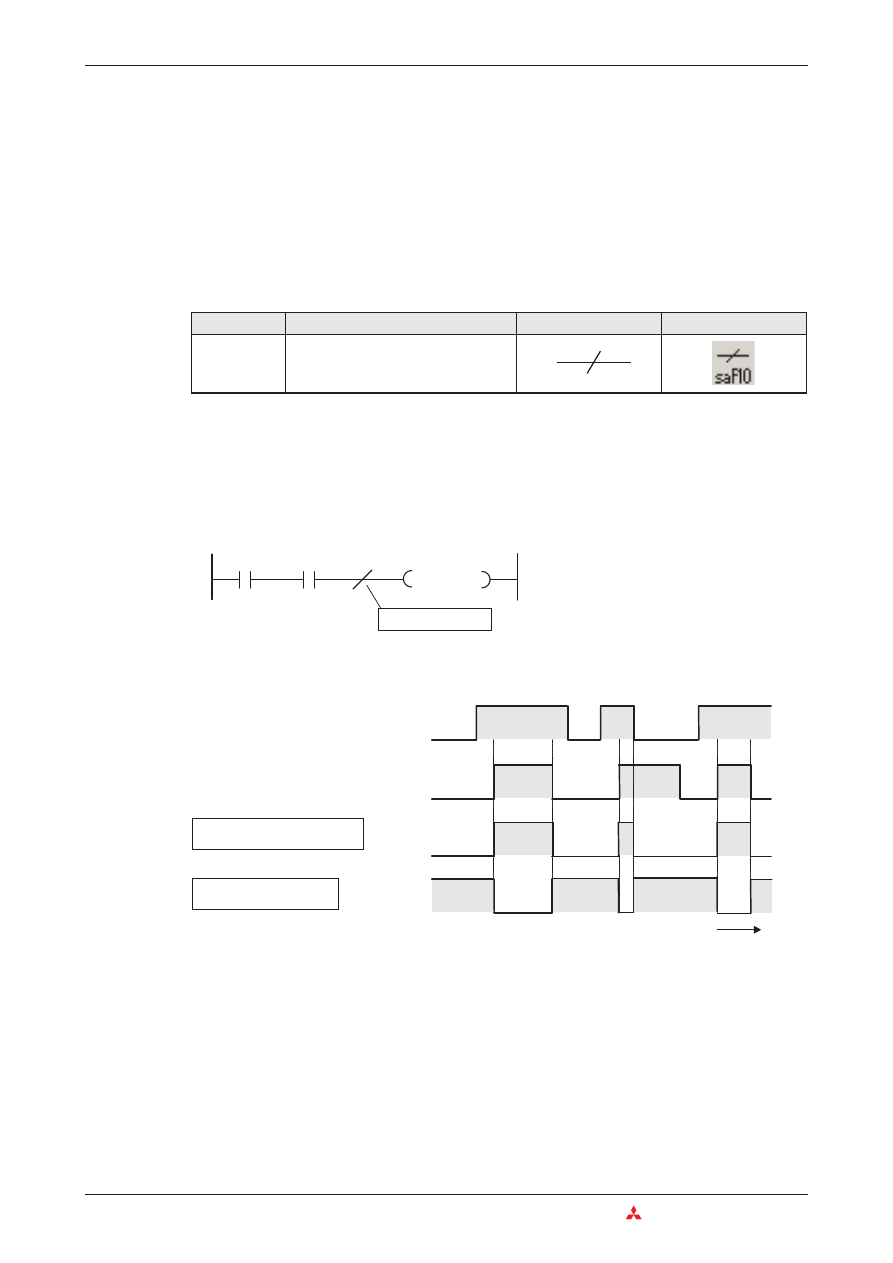
Instrukcja
Funkcja
Symbol
GX Developer FX
SET
Ustawia urządzenie1,
(ustala stan sygnału “1”)
SET
첸
RST
Zeruje urządzenie 2,
(ustala stan sygnału “0”)
RST
첸
F8
F8
Niniejszy przykład jest programem sterowania pompą do napełniania zbiornika. Pompa sterowana
jest ręcznie dwoma przyciskami, ON i OFF. Ze względów bezpieczeństwa użyty został styk roz-
wierny do uaktywnienia funkcji wyłączania. Gdy zbiornik jest pełny, czujnik poziomu automaty-
cznie wyłącza pompę.
3 – 16
MITSUBISHI ELECTRIC
Zestaw instrukcji podstawowych
Wstęp do programowania
Schemat drabinkowy
Lista instrukcji
0
LD
X001
1
SET
Y000
2
LDI
X002
3
OR
X003
4
RST
Y000
Włącz
pompę
Wyłącz
pompę
Czujnik
poziomu
Pompa
Pompa
X001
X003
X002
RST
Y000
SET
Y000
0
2
Schemat drabinkowy
Lista instrukcji
0
LD
X001
1
SET
M0
2
LD
X002
3
RST
M0
X2
X1
M0
t
Jeśli obydwie instrukcje (ustawiania i zerowa-
nia) są równocześnie aktywne dla tego samego
urządzenia, ostatnia wykonywana operacja ma
pierwszeństwo. W tym przykładzie jest to
instrukcja RST, stąd M0 pozostaje wyłączony.
X001
X002
SET
M0
RST
M0
0
2
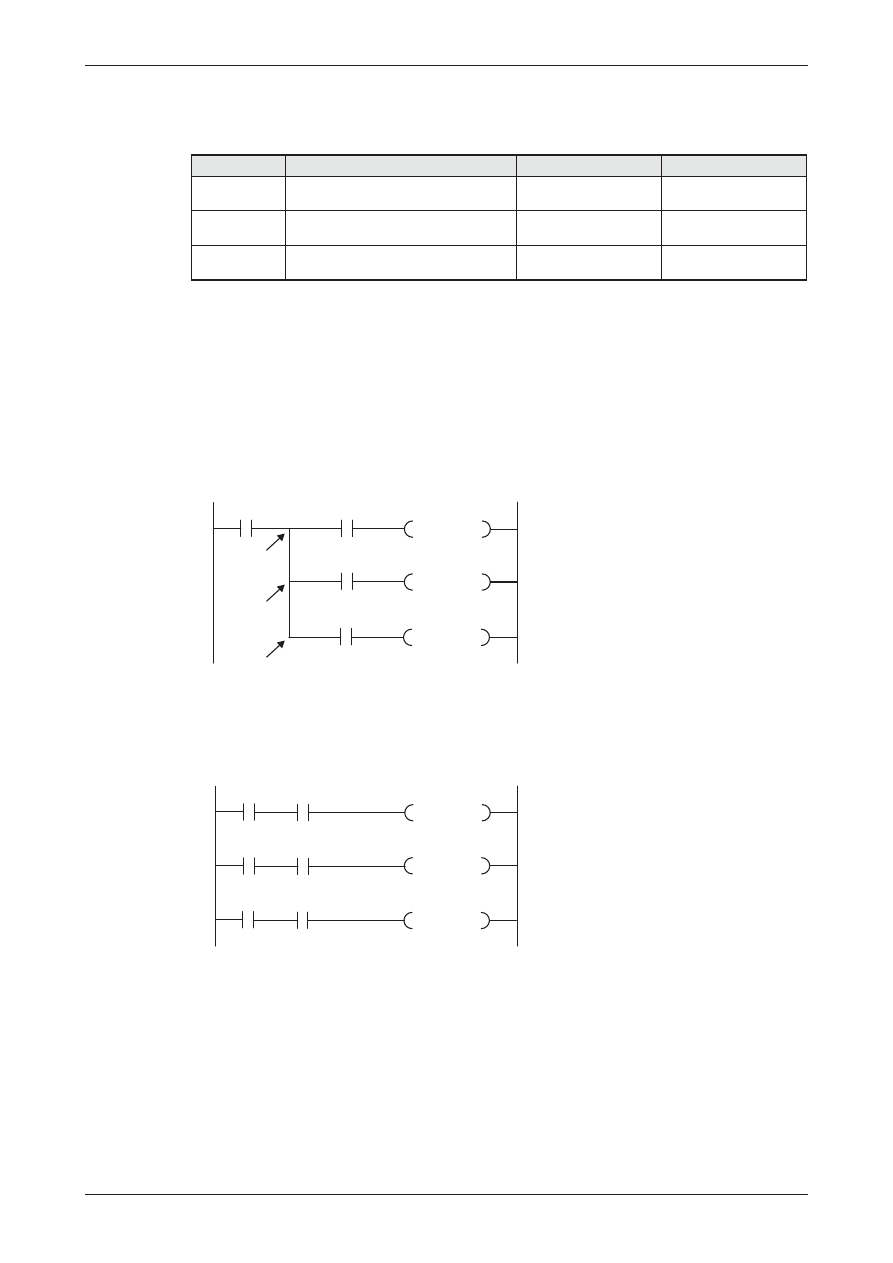
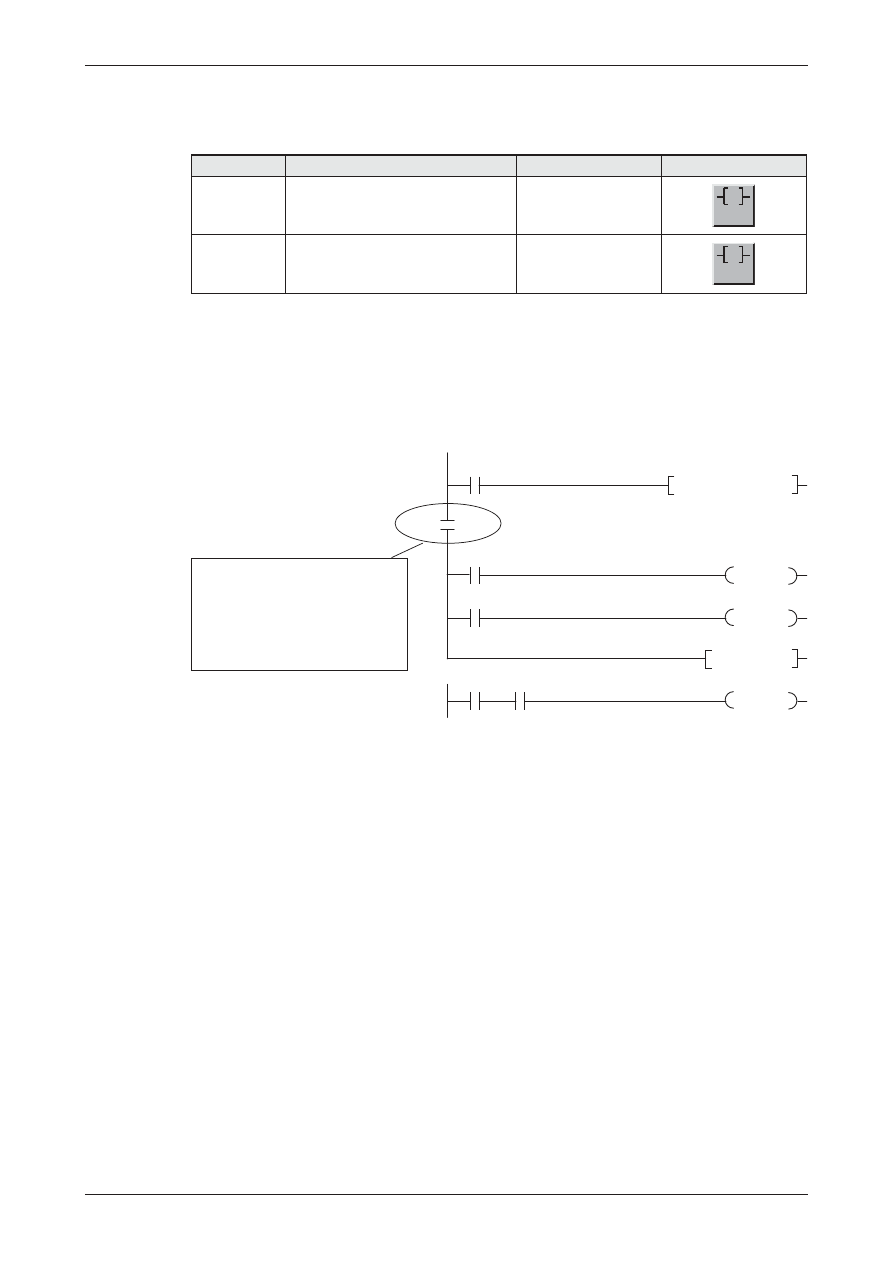
3.4.9
Wprowadzanie do pamięci, odczytywanie i kasowanie wyników działania
Instrukcje MPS, MRD oraz MPP używane są do wprowadzania wyników operacji i wartości pośredn-
ich do pamięci nazywanej "stos", do odczytu oraz do kasowania zapisanych wyników. Instrukcje te
umożliwiają programowanie operacji wielopoziomowych, co upraszcza czytanie i zarządzanie
programami.
Gdy programy wprowadzane są w formacie schematu drabinkowego, instrukcje te wstawiane są
automatycznie przez program narzędziowy. Instrukcje MPS, MRD i MPP pokazywane są na bieżąco
wtedy, gdy program wyświetlany jest w formacie listy instrukcji; jeśli program tworzony jest rów-
nież w tym formacie, muszą być wprowadzane ręcznie.
Chcąc wyraźniej pokazać zalety tych instrukcji, na poniższym przykładzie przedstawiono tę samą
sekwencję programową, tylko bez instrukcji MPS, MRD i MPP:
Gdy stosowane jest takie przybliżenie, urządzenia (w tym przypadku X0) muszą być programowane
wielokrotnie. Skutkiem tego jest więcej pracy programowej, która może zrobić sporą różnicę w
dłuższych programach i skomplikować konstrukcję obwodów.
W ostatniej instrukcji wyjściowej, celem usunięcia stosu należy zastosować instrukcję MPP zamiast
MRD. Przy tworzeniu działań, instrukcja MPS może być użyta wielokrotne, aż do 11 poziomów. Wię-
cej przykładów zastosowania instrukcji MPS, MRD i MPP można znaleźć w Podręczniku Program-
owania dla serii FX.
Podręcznik dla początkujących
3 – 17
Wstęp do programowania
Zestaw instrukcji podstawowych
Instrukcja
Funkcja
Symbol
GX Developer FX
MPS
Memory Point Store, zapisuje wynik
działania
—
—
MRD
Memory Read, odczytuje zapisany wynik
działania
—
—
MPP
Memory POP, odczytuje zapisany wynik
działania i kasuje go
—
—
X000
X001
X003
X002
Y000
Y002
Y001
0
Schemat drabinkowy
Lista instrukcji
0
LD
X000
1
MPS
2
AND
X001
3
OUT
Y000
4
MRD
5
AND
X002
6
OUT
Y001
7
MPP
8
AND
X003
9
OUT
Y002
MPS
MRD
MPP
X000
X001
X000
X003
X000
X002
Y000
Y001
Y002
0
3
6
Schemat drabinkowy
0
LD
X000
1
AND
X001
2
OUT
Y000
3
LD
X000
4
AND
X002
5
OUT
Y001
6
LD
X000
7
AND
X003
8
OUT
Y002
Lista instrukcji
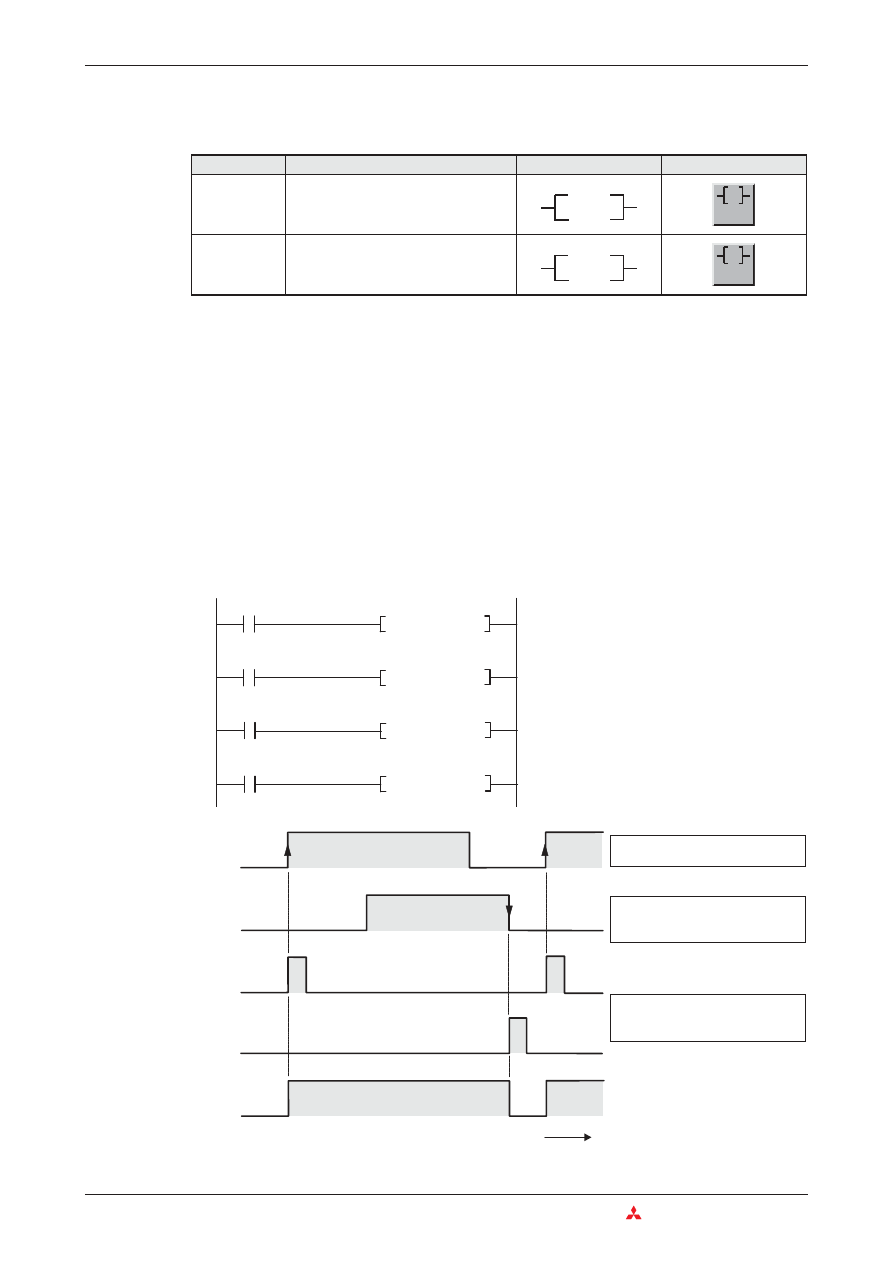
3.4.10
Generowanie impulsów
*
Instrukcje PLS i PLF mogą być użyte do ustawiania wyjść (Y) i przekaźników (M, S).
Instrukcje te efektywnie przekształcają statyczny sygnał na krótki impuls, którego czas trwania zależy od
długości cyklu sterowania. Jeśli zamiast OUT zostanie użyta instrukcja PLS, stan sygnału wyspecyfikowanego
urządzenia będzie ustawiony na "1" na czas trwania pojedynczego cyklu sterowania, konkretnie w czasie cyklu,
w którym stan urządzenia przed instrukcją PLS przełączy się z "0" na "1" (impuls od zbocza narastającego).
Instrukcja PLF reaguje na opadające zbocze impulsu i ustawia określone urządzenie na "1" na czas
trwania pojedynczego cyklu sterowania, konkretnie w czasie cyklu, w którym stan urządzenia przed
instrukcją PLF przełączy się z "1" na "0" (impuls od zbocza opadającego).
Chcąc w formacie drabinkowym wprowadzić instrukcję PLS lub PLF, na pasku narzędzi w GX Deve-
loper należy kliknąć na pokazaną wyżej ikonę, lub wcisnąć F8. Następnie do okienka dialogowego
wprowadzana jest instrukcja i odpowiednie urządzenie, np. PLS Y2.
3 – 18
MITSUBISHI ELECTRIC
Zestaw instrukcji podstawowych
Wstęp do programowania
Instrukcja
Funkcja
Symbol
GX Developer FX
PLS
Pulse, na narastającym zboczu impulsu
załączającego warunek wejściowy,
instrukcja ustawia urządzenie* na czas
trwania pojedynczego cyklu programu
PLS
첸
PLF
Pulse Falling, na opadającym zboczu
impulsu załączającego warunek wejściowy,
instrukcja ustawia urządzenie* na czas
trwania pojedynczego cyklu programu
PLF
첸
X000
X001
M0
M1
PLS
M0
PLF
M1
SET
Y000
RST
Y000
0
2
4
6
Schemat drabinkowy
Lista instrukcji
0
LD
X000
1
PLS
M0
2
LD
M0
3
SET
Y000
4
LD
X001
5
PLF
M1
6
LD
M1
7
RST
Y000
F8
Funkcję wyzwala narastające zbocze
sygnału urządzenia X0.
Przekaźniki M0 i M1, załączane są
tylko na czas trwania pojedynczego
cyklu programu.
W przypadku urządzenia X1,
funkcja wyzwalana jest opadającym
zboczem sygnału.
M1
X1
M0
Y0
X0
t
F8
3.4.11
Funkcja Master Control (instrukcje MC i MCR)
���
Instrukcja MC może być używana z wyjściami (Y) i przekaźnikami (M). n: N0 do N7
���
n: N0 do N7
Instrukcje Master Control Set (MC) i Reset (MCR) mogą być używane do ustawiania warunków, na
bazie których poszczególne bloki programów mogą być aktywowane lub dezaktywowane.
Instrukcja Master Control w formacie schematu drabinkowego funkcjonuje jak wyłącznik w pasku
lewej magistrali, który musi być załączony, żeby następny blok programu mógł być wykonany.
W powyższym przykładzie, linie programu pomiędzy instrukcjami MC i MCR wykonywane są tylko
wtedy, gdy wejście X001 jest załączone.
Wykonywana część programu może zostać wyspecyfikowana za pomocą adresów zagłębienia N0
do N7, które pozwalają na wielokrotne wprowadzenie instrukcji MC, przed zamknięciem instrukcją
MCR. (Przykłady zagłębienia można zobaczyć w podręczniku programowania FX.) Zaadresowanie
urządzenia Y lub M określa styk zwierny. Gdy warunek wejściowy instrukcji MC przyjmie wartość "1",
styk ten aktywuje część programu.
Podręcznik dla początkujących
3 – 19
Wstęp do programowania
Zestaw instrukcji podstawowych
Instrukcja
Funkcja
Symbol
GX Developer FX
MC
Master Control, ustawia warunek
sterowania nadrzędnego, zaznaczając
początek bloku programu1
MC n
£
MCR
Master Control Reset, zeruje warunek
sterowania nadrzędnego, zaznaczając
koniec bloku programu2
MCR n
F8
F8
Schemat drabinkowy
Lista instrukcji
0
LD
X001
1
MC
N0
M10
4
LD
X002
5
OUT
Y003
6
LD
X003
7
OUT
Y004
8
MCR
N0
10 LD
X002
11 AND
X004
12 OUT
M155
"Wyłącznik” nie musi być progra-
mowany ręcznie,
i faktycznie, w czasie wykonywa-
nia programu, jest tylko
wyświetlany w trybie
monitorowania.
X002
X001
X003
N0
MC
N0
M10
MCR
N0
Y003
Y004
0
4
6
8
M10
X002
M155
10
X004
Jeśli warunek wejściowy instrukcji MC przyjmie wartość "0", stany urządzeń pomiędzy instrukcjami
MC i MCR zmieniają się następująco:
–
Timery podtrzymywane, liczniki oraz urządzenia sterowane instrukcjami SET i RST podtrzymują
swój stan bieżący.
–
Timery niepodtrzymywane i urządzenia, które sterowane są instrukcją OUT, są zerowane.
(Szczegóły związane z tymi timerami i licznikami opisano w rozdziale 4.)
3.4.12
Odwracanie wyniku działania
Instrukcja INV używana jest samodzielnie bez jakichkolwiek operandów. Odwraca wynik operacji,
który pojawia się bezpośrednio przed nią:
–
Jeśli wynik operacji wynosił "1", odwracany jest na "0".
–
Jeśli wynik operacji wynosił "0", odwracany jest na "1".
Powyższy przykład wytwarza następującą sekwencję sygnału:
Instrukcja INV może zostać zastosowana wtedy, gdy potrzebna jest negacja wyniku złożonej oper-
acji. Może być użyta w tym samym miejscu, w którym stosowane są instrukcje AND i ANI.
Instrukcja INV nie może być użyta na początku operacji (obwodu), tak jak instrukcje LD, LDI, LDP lub LDF.
3 – 20
MITSUBISHI ELECTRIC
Zestaw instrukcji podstawowych
Wstęp do programowania
Instrukcja
Funkcja
Symbol
GX Developer FX
INV
Invert, odwraca wynik operacji
Y000
X001
X002
0
Schemat drabinkowy
Lista instrukcji
0
LD
X001
1
AND
X002
2
INV
3
OUT
Y000
Instrukcja INV
Y000
X001
t
0
1
0
1
X002
0
1
0
1
Wynik działania przed instrukcją
INV
Wynik działania po
instrukcji INV
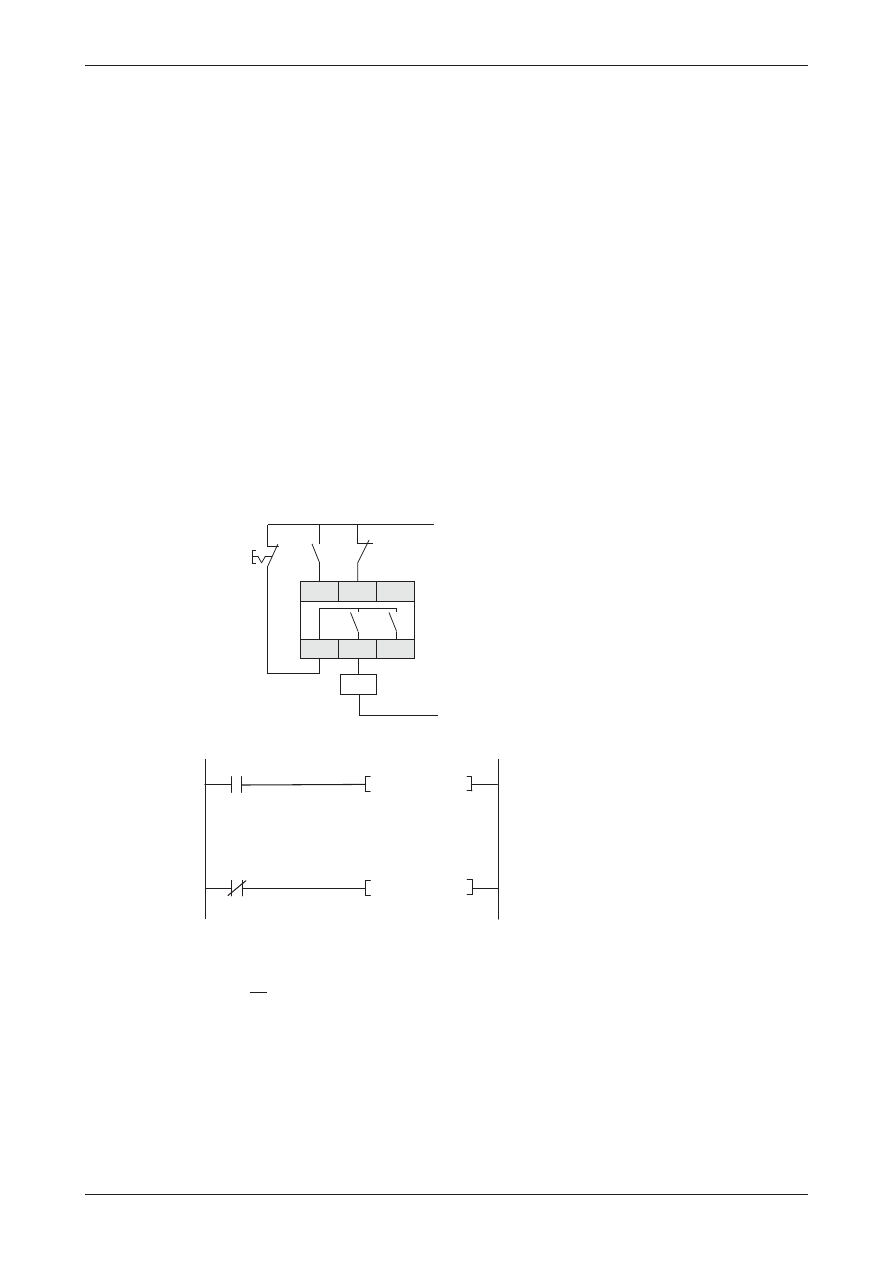
3.5
Przede wszystkim bezpieczeństwo!
Sterowniki PLC mają wiele przewag na sterownikami programowanymi np. zworami czy przewod-
ami. Jednak z punktu widzenia bezpieczeństwa, ważną rzeczą jest zrozumienie, że nie można bez-
warunkowo wierzyć PLC.
Elementy awaryjnego zatrzymania
Zasadniczą sprawą jest nabranie pewności, że błędy w systemie sterowania lub w programie nie
spowodują zagrożenia dla personelu lub maszyny. Urządzenia awaryjnego zatrzymania muszą
pozostać w pełni funkcjonalne nawet wtedy, gdy PLC nie pracuje poprawnie - na przykład, jeśli to
konieczne, przez wyłączenie napięcia zasilającego wyjścia PLC.
Nigdy nie stosować wyłącznika bezpieczeństwa wyłącznie jako sygnału wejściowego przetwar-
zanego przez PLC, z programową aktywacją wyłączenia systemu. Jest to zbyt ryzykowne.
Środki bezpieczeństwa przed uszkodzeniem przewodu
Należy również poczynić kroki, mające na celu zabezpieczenie przed ewentualnymi uszkodzeniami
przewodu, doprowadzającego do PLC sygnały z wyłączników. Gdy sprzęt jest włączany i wyłączany
poprzez PLC, do włączania należy zawsze używać wyłączników zwiernych, natomiast do wyłączania
- rozwiernych.
Gdy kabel zostanie przerwany, zapewnia to automatyczne wyłączenie napędu i uniemożliwia jego
aktywację. Dodatkowo, wyłączenie ma pierwszeństwo, ponieważ stan ten jest przetwarzany przez
program po instrukcji załączenia.
Blokada styków
Jeśli dwa wyjścia nie mogą być nigdy załączone w tym samym czasie - na przykład wyjścia
wybierające jeden z dwóch kierunków obrotów silnika - musi zostać zainstalowana dodatkowa blo-
kada wyjść, zbudowana z fizycznych styków przekaźników, sterowanych przez PLC. Jest to
konieczne, ponieważ wewnętrzna blokada możliwa jest tylko w programie, natomiast błąd w PLC
może obydwa wyjścia uaktywnić w tym samym czasie.
Podręcznik dla początkujących
3 – 21
Wstęp do programowania
Przede wszystkim bezpieczeństwo!
WYŁ.
BEZPIE-
CZEŃSTWA
0 V
+24 V
ON
OFF
X000 X001
COM Y000
X002
Y001
W t y m p r z y k ł a d z i e, s t y c z n i k s y s t e m u
napędowego może być również wyłączony
ręcznie, za pomocą wyłącznika bezpieczeństwa.
Włącz silnik
Wyłącz silnik
Włącz silnik
Włącz silnik
X001
X002
RST
Y000
SET
Y000
0
2
W programie do tej instalacji, styk zwierny
wyłącznika do włączania silnika, wybierany jest
instrukcją LD, natomiast styk rozwierny do
wyłączania silnika, instrukcją LDI. Wyjście, i w
ten sposób również napęd, jest wyłączane, gdy
wejście X002 znajduje się w stanie „0”. Jest to
ten przypadek, w którym zadziała wyłącznik do
zatrzymania silnika, lub, gdy połączenie
pomiędzy wyłącznikiem i wyjściem X002 zos-
taje przerwane.
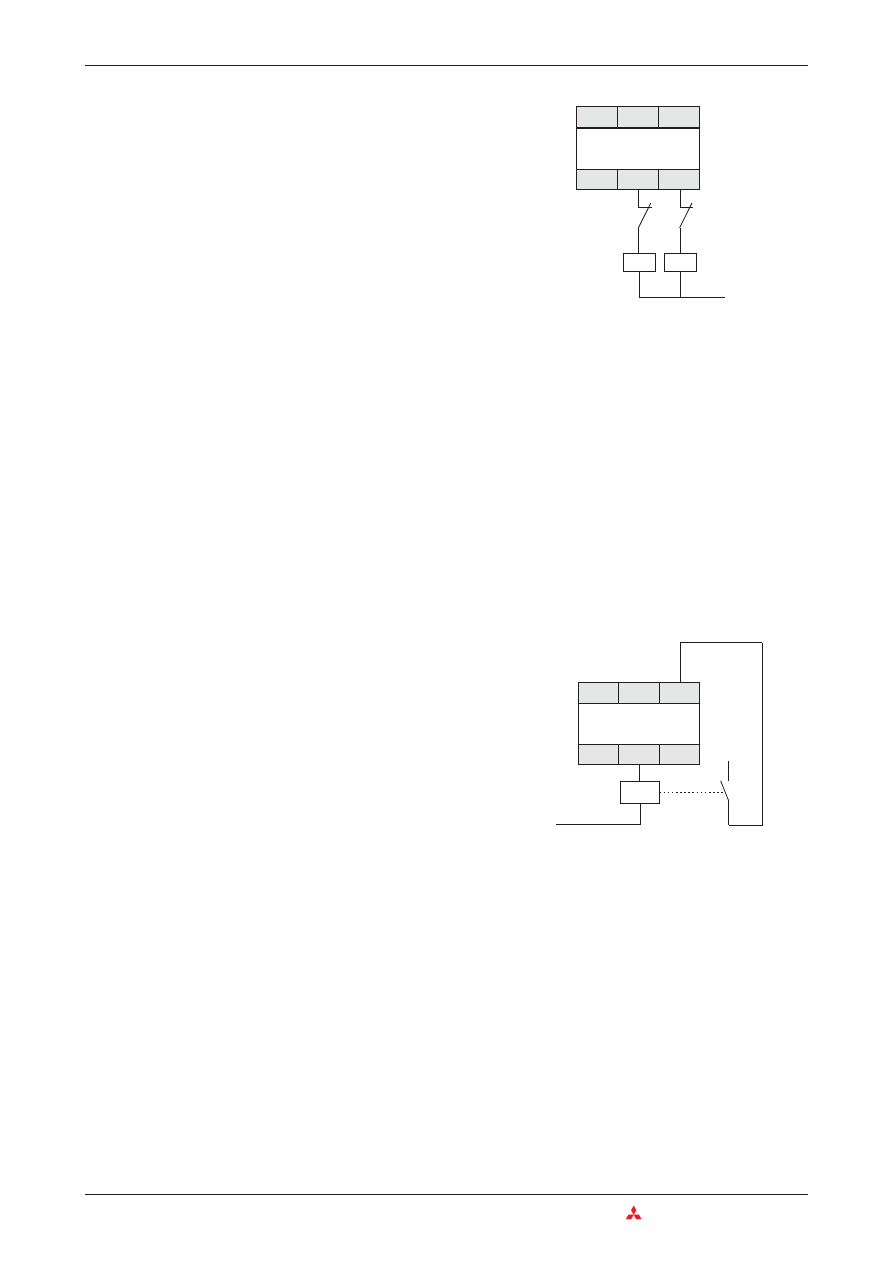
Automatyczne wyłączenie
Gdy PLC używany jest do sterowania sekwencjami ruchu, w których po przesunięciu elementów
poza ustalone punkty może pojawić się zagrożenie, muszą zostać zainstalowane dodatkowe
wyłączniki, w celu automatycznego przerwania ruchu. Wyłączniki te muszą spełniać swoją funkcję
bezpośrednio i niezależnie od PLC. Przykład takiej instalacji automatycznego wyłączania, znajduje
się w rozdziale 3.6.2.
Sygnał sprzężenia zwrotnego od wyjścia
Ogólnie można powiedzieć, że wyjścia PLC nie są monitorowane. Gdy wyjście zostanie uaktywni-
one, program zakłada, że na zewnątrz PLC nastąpiła poprawna reakcja. W większości przypadków
nie są wymagane dodatkowe rozwiązania. Jednak w przypadku krytycznych zastosowań w PLC
powinno się również monitorować sygnały wyjściowe - na przykład, gdy pojawienie się błędów w
obwodach wyjściowych (przerwanie kabli, sklejenie styków) mogło by spowodować poważne
skutki dla bezpieczeństwa lub funkcjonowania systemu.
3 – 22
MITSUBISHI ELECTRIC
Przede wszystkim bezpieczeństwo!
Wstęp do programowania
X000 X001
COM Y000
X002
Y001
W przykładzie z prawej, styk zwierny w styczniku
K1 włącza wejście X002, gdy wyjście Y000
zostanie załączone. Pozwala to w programie
monitorować, czy wyjście i podłączony stycznik
funkcjonują poprawnie. Należy zwrócić uwagę,
że to proste rozwiązanie nie sprawdza, czy
załączone urządzenie funkcjonuje poprawnie
( n p . c z y s i l n i k r z e c z y w i ś c i e p r a c u j e ) . D o
sprawdzenia tego, mogły by być konieczne
dodatkowe funkcje, na przykład czujnik obrotów
lub monitor obciążenia napięcia.
+24 V
K1
K2
K1
K2
K1
X000 X001
COM Y000
X002
Y001
Przykład z prawej pokazuje taką blokadę,
w y k o n a n ą n a s t y k a c h s t y c z n i k ó w . D l a
styczników K1 i K2 jest fizycznie niemożliwe, żeby
były załączone w tym samym czasie.
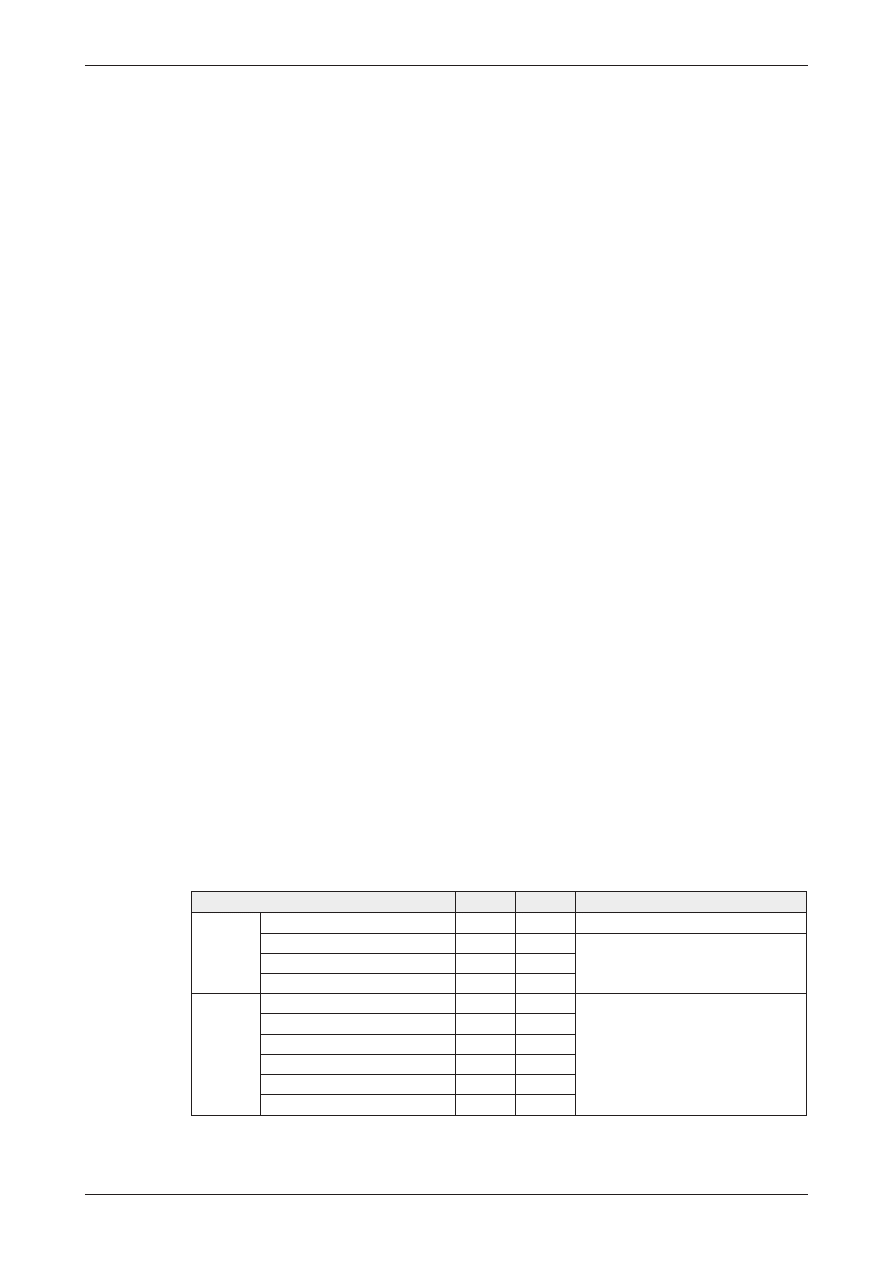
3.6
Oprogramowanie użytkowe w PLC
Sterowniki programowalne dostarczają prawie nieograniczonej liczby sposobów powiązania wejść
z wyjściami. Naszym zadaniem jest wybranie odpowiednich instrukcji spośród wielu dostępnych w
rodzienie MELSEC FX, w celu właściwego rozwiązania swojego zastosowania.
Niniejszy rozdział przedstawia dwa proste przykłady, które pokazują rozbudowę programu uży-
tkowego PLC, począwszy od zdefiniowania zadania aż do końcowego programu.
3.6.1
System alarmowy
Pierwszym krokiem jest posiadanie jasnej koncepcji, co chcemy zrobić. Oznacza to, że trzeba
przyjąć zasadę zbliżania się i jasno opisać, co PLC ma robić.
Opis zadania
Celem jest stworzenie systemu alarmowego do zazbrojenia i rozbrojenia systemu, z kilkoma
obwodami alarmowymi i funkcją opóźnienia.
–
System będzie uzbrajany za pomocą klucza z wyłącznikiem, z 20-sekundowym opóźnieniem
pomiędzy zmianą stanu wyłącznika i aktywacją. Daje to użytkownikowi wystarczająco dużo
czasu na opuszczenia domu, nie wyzwalając alarmu. W czasie tego okresu opóźnienia
wyświetlacz pokaże, czy obwody alarmowe są zamknięte.
–
Alarm zostanie wyzwolony, gdy jeden z obwodów zostanie przerwany (system z zamkniętymi
obwodami, wyzwalany również wtedy, gdy nastąpi sabotaż). Dodatkowo chcemy zobaczyć,
który obwód wyzwolił alarm.
–
Gdy alarm zostanie wyzwolony, z opóźnieniem 10 sek. załączy się syrena oraz zacznie migać
lampa alarmu. (Alarm akustyczny i wizualny zostaną uaktywnione po czasie opóźnienia, co
umożliwi rozbrojenie systemu po wejściu do domu . Jest to również przyczyna, dlaczego
chcemy użyć specjalnej lampy do pokazania, że system jest uzbrojony.)
–
Syrena będzie wydawać dźwięk tylko przez 30 sek., lecz lampa alarmowa pozostanie aktywna aż
do chwili rozbrojenia systemu.
–
Wyłącznik uruchamiany kluczem będzie również używany do dezaktywacji systemu alarmowego.
Przydzielenie sygnałów wejściowych i wyjściowych
Następnym krokiem jest zdefiniowanie sygnałów wejściowych i wyjściowych, które wymagają
przetwarzania. Na podstawie specyfikacji wiemy, że będziemy potrzebowali 1 wyłącznik z kluczy-
kiem i 4 lampy alarmowe. Dodatkowo potrzebujemy 3 wejścia do obwodów alarmowych i 2 wyjścia
dla syreny i migającej lampy alarmowej. W sumie daje to 4 wejścia i 6 wyjść. Następnie przy-
porządkowujemy te sygnały do wejść i wyjść PLC.
Podręcznik dla początkujących
3 – 23
Wstęp do programowania
Oprogramowanie użytkowe w PLC
Funkcja
Nazwa
Adres
Uwagi
Wejście
Uzbrojenie systemu
S1
X1
Styk zwierny (wyłącznik w stacyjce)
Obwód alarmowy 1
S11, S12
X2
Styki rozwierne (alarm jest wyzwalany, gdy
wejście uzyska stan “0”)
Obwód alarmowy 2
S21, S22
X3
Obwód alarmowy 3
S31, S32
X4
Wyjście
Wyświetla „Uzbrojenie systemu”
H0
Y0
Funkcje wyjściowe zostają uaktywnione,
gdy odpowiednie wyjścia są załączone. Na
przykład, jeśli Y1 jest ustawiony, alarm
akustyczny będzie wydawał dźwięk.
Alarm akustyczny (syrena)
E1
Y1
Alarm wizualny (latarnia obrotowa)
H1
Y2
Wyświetla obwód alarmowy 1
H2
Y3
Wyświetla obwód alarmowy 2
H3
Y4
Wyświetla obwód alarmowy 3
H4
Y5
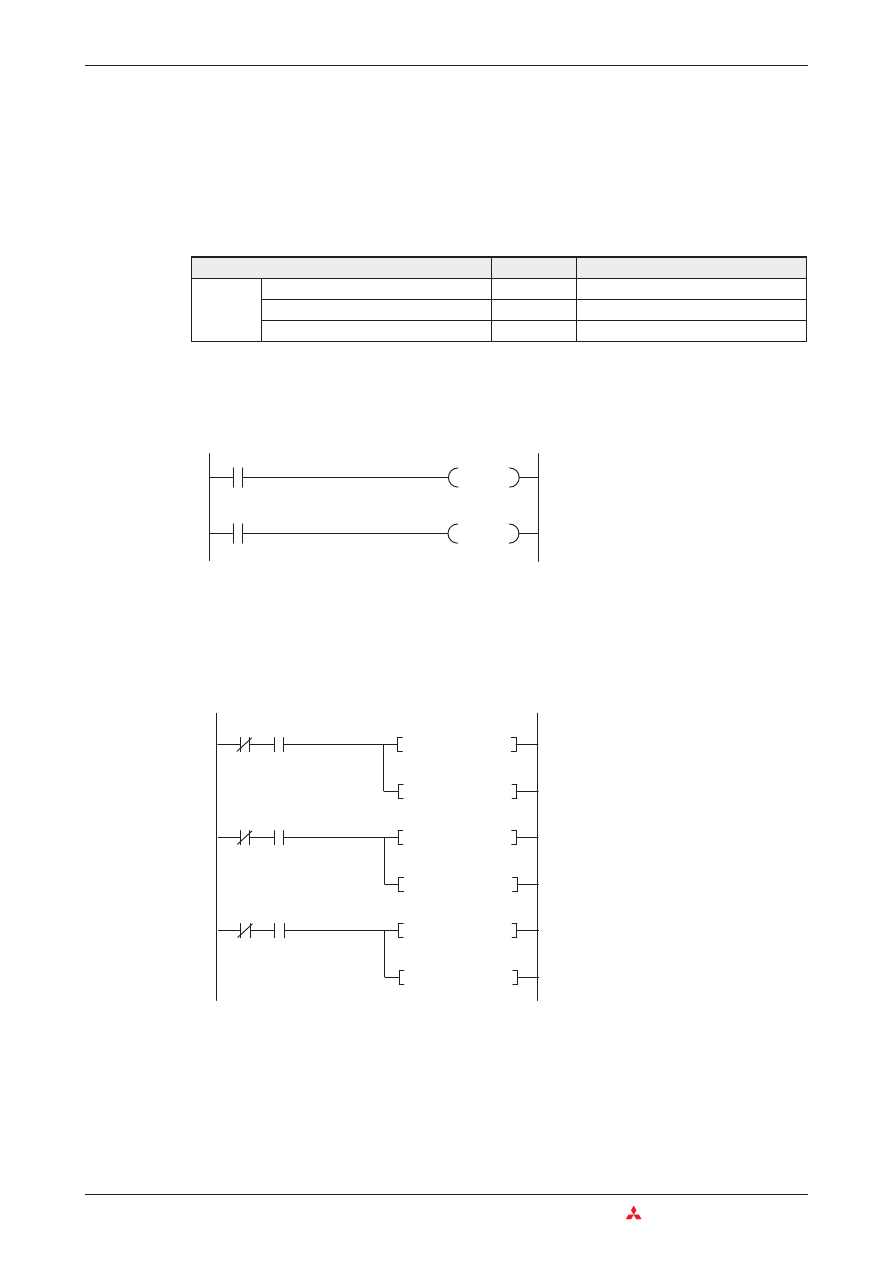
Programowanie
Teraz możemy rozpocząć pisanie programu. Czy urządzenia przekaźnikowe będą potrzebne, jeśli
tak, ile zostaje wyzerowanych, gdy faktycznie rozpocznie się program. Pewne w tym projekcie jest
to, że do ważnych funkcji potrzebujemy trzy timery. Jeśli używamy sterownika programowanego
sprzętowo, użylibyśmy do tego przekaźników czasowych. W PLC mamy do dyspozycji elektroni-
czne, programowalne timery (zob. dział 4.3). Timery te mogą być również zdefiniowane zanim
zaczniemy programowanie.
Następnie możemy zaprogramować poszczególne zadania sterujące:
쎲 Opóźnione zazbrojenie systemu alarmowego
Gdy wyłącznik z kluczykiem zostanie załączony, opóźnienie zbudowane na liczniku czasu T0 roz-
poczyna pracę. Po 20 sekundach (K200 = 200 x 0,1s = 20s) zaświeci się lampka wskaźnika
podłączona do wyjścia Y000, pokazując, że system został zazbrojony.
쎲 Monitor obwodów alarmowych i sygnał wyzwolenia alarmu
Wyjście Y000 zostało w tym programie wybrane do sprawdzenia, czy system alarmowy jest zazbrojo-
ny. Można tutaj użyć również przekaźnika, który mógłby być ustawiany i kasowany razem z Y000.
Jeśli system alarmowy jest faktycznie zazbrojony, przerwanie obwodu alarmowego ustawi tylko
przekaźnik M1 (pokazując, że alarm został wyzwolony). Dodatkowe wyjścia Y003 do Y005 użyte
zostały do wskazania, który obwód alarmowy wyzwolił alarm. Przekaźnik M1 i wyjście odpowiedni-
ego obwodu alarmowego pozostaną ustawione nawet wtedy, gdy obwód alarmowy zostanie
ponownie zamknięty.
3 – 24
MITSUBISHI ELECTRIC
Oprogramowanie użytkowe w PLC
Wstęp do programowania
Funkcja
Adres
Uwagi
Licznik
czasu
Opóźnienie uzbrojenia systemu
T0
Czas: 20 sekund
Opóźnienie wyzwolenia alarmu
T1
Czas: 10 sekund
Okres aktywacji syreny
T2
Czas: 30 sekund
0
4
T0
Y000
K200
X001
T0
Schemat drabinkowy
Lista instrukcji
0
LD
X001
1
OUT
T0
K200
4
LD
T0
5
OUT
Y000
X002
X003
X004
Y000
Y000
Y000
6
10
14
M1
M1
Y003
Y004
M1
SET
SET
SET
SET
SET
SET
Y005
Schemat drabinkowy
Lista instrukcji
6
LDI
X002
7
AND
Y000
8
SET
M1
9
SET
Y003
10 LDI
X003
11 AND
Y000
12 SET
M1
13 SET
Y004
14 LDI
X004
15 AND
Y000
16 SET
M1
17 SET
Y005
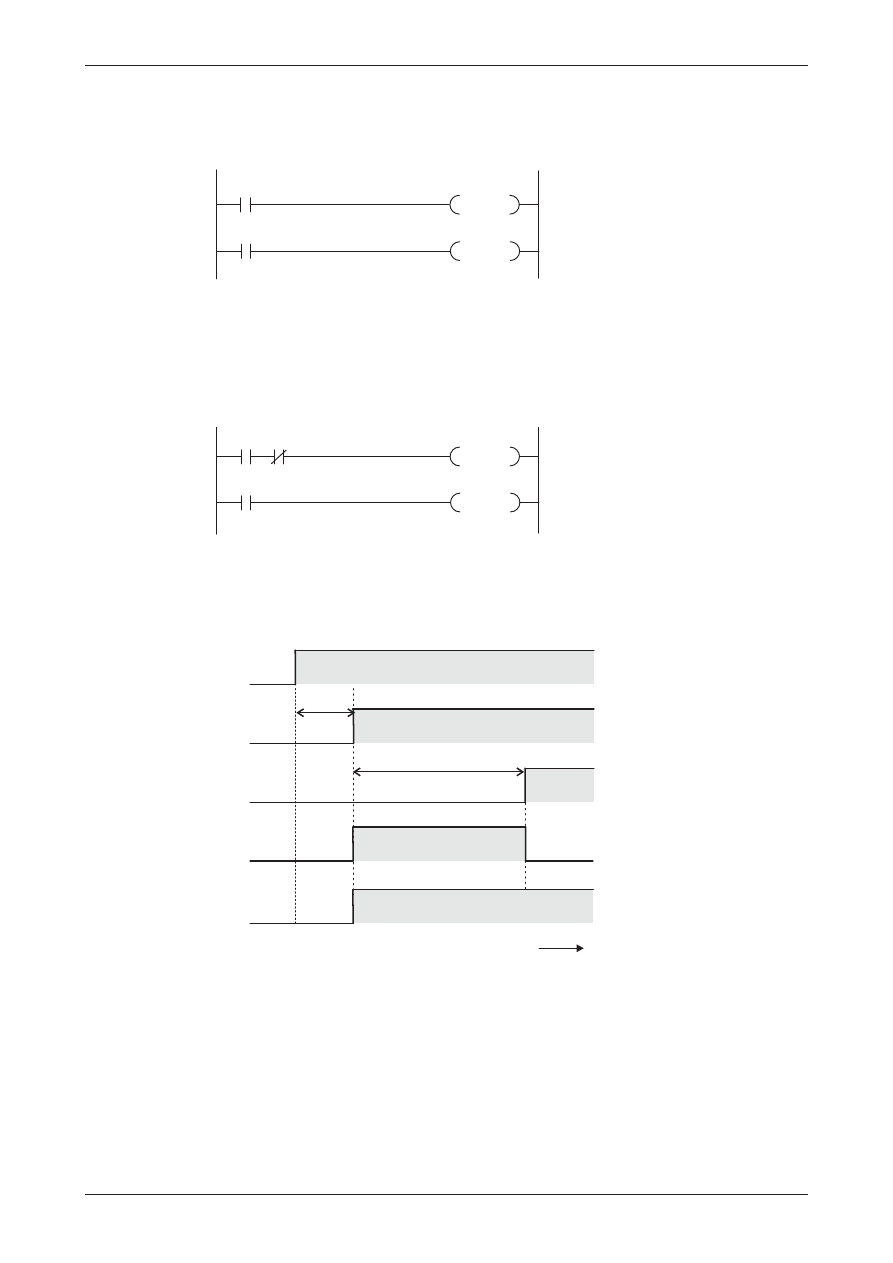
쎲 Opóźnienie aktywacji alarmu
Gdy alarm zostanie wyzwolony (M1 załączy się na "1"), uruchamia się 10 s timer opóźniający. Nast-
ępnie po 10 sekundach T1 uruchamia timer T2, który ustawiony jest na 30 sekund, i rozpoczyna się
czas aktywacji syreny.
쎲 Wyświetlanie alarmu (załącza syrenę i latarnię obrotową)
Syrena zostanie uatywniona po 10 sekundowym opóźnieniu (T1) i pozostaje włączona podczas
oracy timera T2. Po zakończeniu 30 sek. okresu aktywacji (T2), syrena dezaktywuje się. Latarnia
obrotowa załącza się również po 10 sek. opóźnieniu. Następna ilustracja pokazuje sekwencje
sygnałów, generowanych przez tę sekcję programu.
Podręcznik dla początkujących
3 – 25
Wstęp do programowania
Oprogramowanie użytkowe w PLC
T2
T1
T1
26
29
Y001
Y002
Schemat drabinkowy
Lista instrukcji
26 LD
T1
27 ANI
T2
28 OUT
Y001
29 LD
T1
30 OUT
Y002
T2
T1
Y1
M1
10 s
t
OFF
ON
0
1
0
1
30 s
0
1
Y2
OFF
ON
Schemat drabinkowy
Lista instrukcji
18 LD
M1
19 OUT
T1
K100
22 LD
T1
23 OUT
T2
K300
M1
T1
18
22
T1
T2
K100
K300
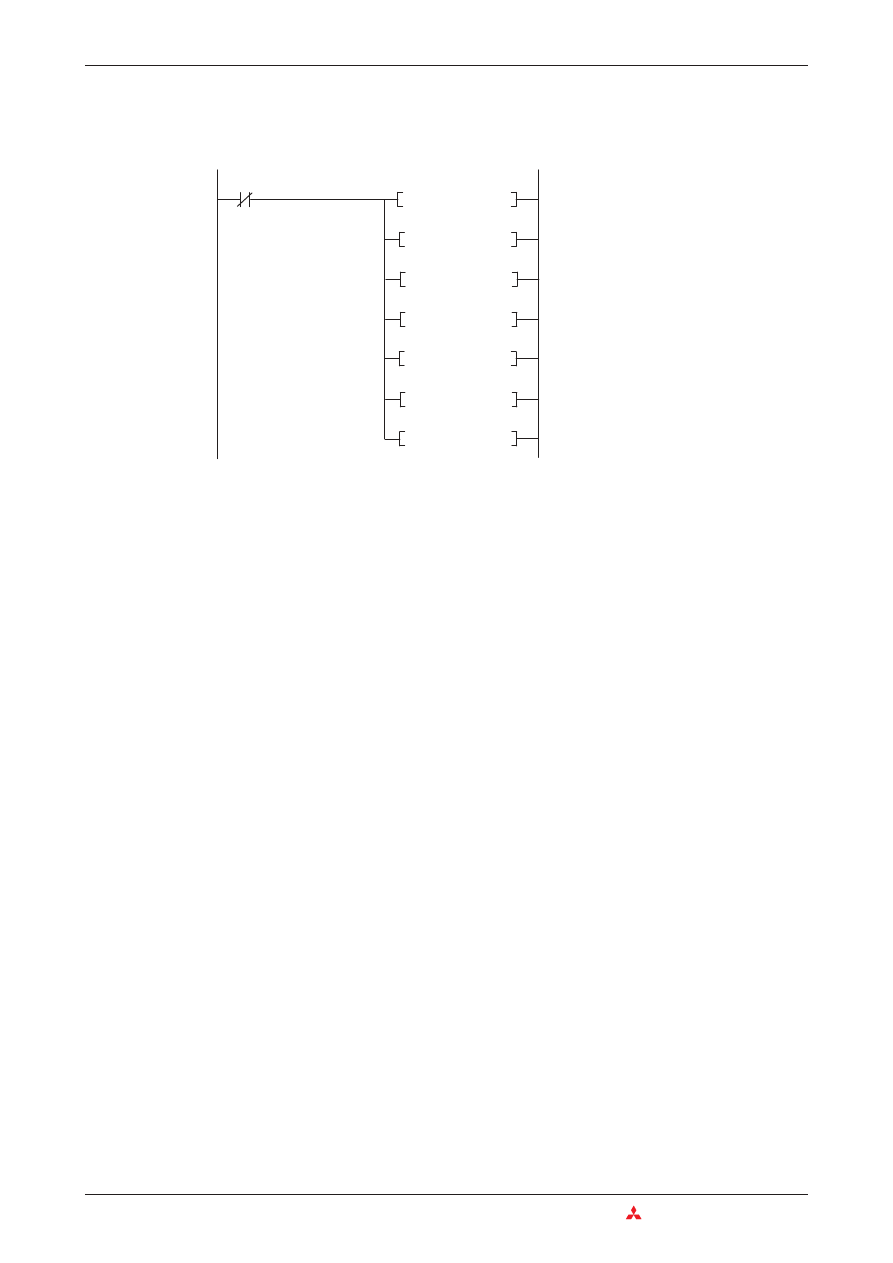
쎲 Kasowanie wszystkich wyjść i przekaźnika
Gdy za pomocą stacyjki z kluczykiem wyłączony zostanie system alarmowy, wszystkie wyjścia użyte
w programie i przekaźnik M1 zostają wyłączone. Jeśli alarm był wywołany, to przerwany obwód
alarmowy, który był wyzwolony, jest wyświetlany do czasu wyłączenia systemu.
3 – 26
MITSUBISHI ELECTRIC
Oprogramowanie użytkowe w PLC
Wstęp do programowania
X001
31
Y000
Y001
Y002
Y003
Y004
Y005
M1
RST
RST
RST
RST
RST
RST
RST
Schemat drabinkowy
Lista instrukcji
31 LDI
X001
32 RST
Y000
33 RST
Y001
34 RST
Y002
35 RST
Y003
36 RST
Y004
37 RST
Y005
38 RST
M1
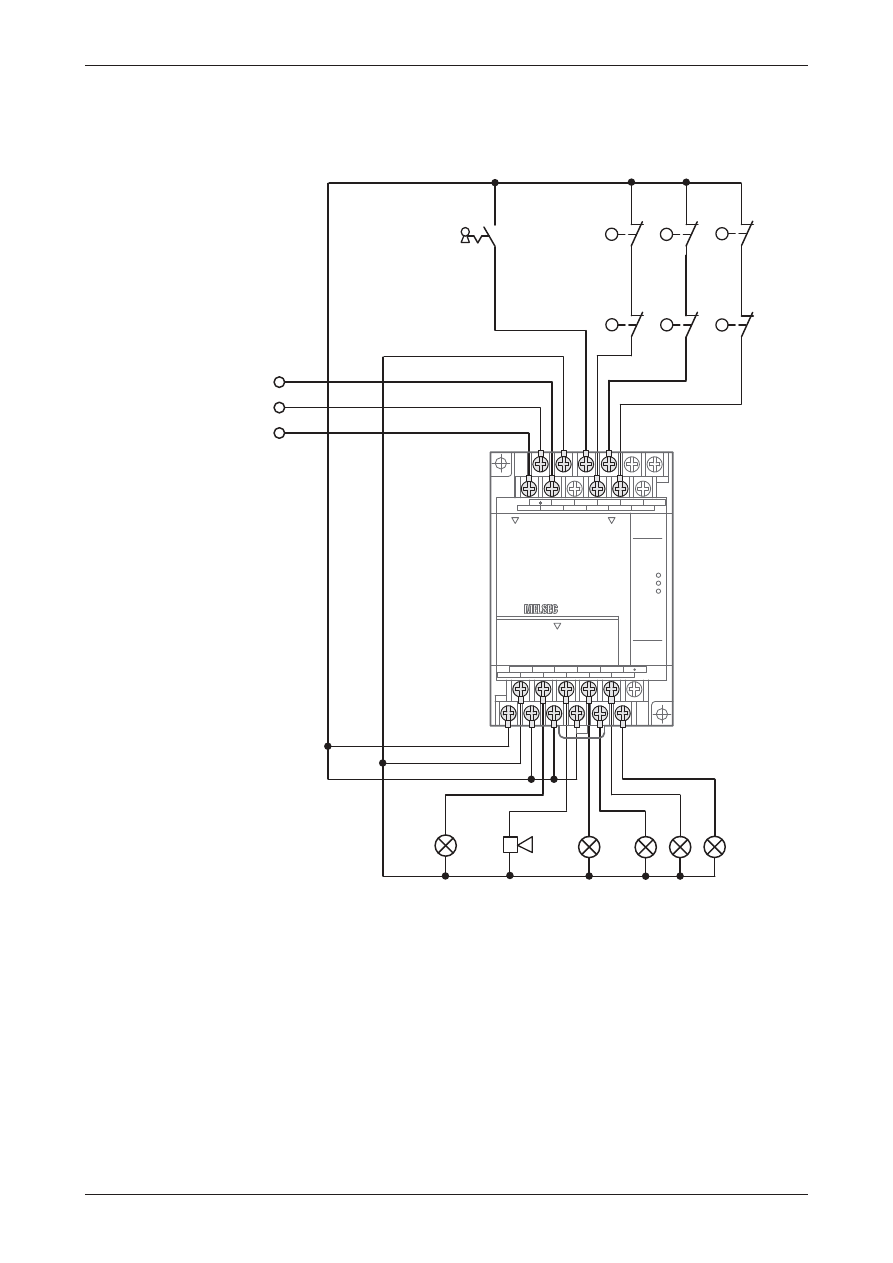
Połączenie PLC
Poniższy szkic pokazuje, jak łatwo zrealizować omawiany system alarmowy, stosując PLC z rodziny
FX. Przykład pokazuje FX1N-14MR.
Podręcznik dla początkujących
3 – 27
Wstęp do programowania
Oprogramowanie użytkowe w PLC
S1
S/S 0 V
N
PE
H1
H2
H3
H4
H0
E1
L1
S21
S11
S31
S32
S22
S12
MITSUBISHI
POWER
RUN
ERROR
FX -14MR
1S
0 1 2 3
4 5 6 7
0 1 2 3
4 5
IN
100-240
VAC
14MR
-ES/UL
L
N
S/S
X0
X1
X2
X3
X4
X5
X6
X7
OUT
24V
COM0
Y0
0V
COM1
Y1
COM2
Y2
Y3
Y4
Y5
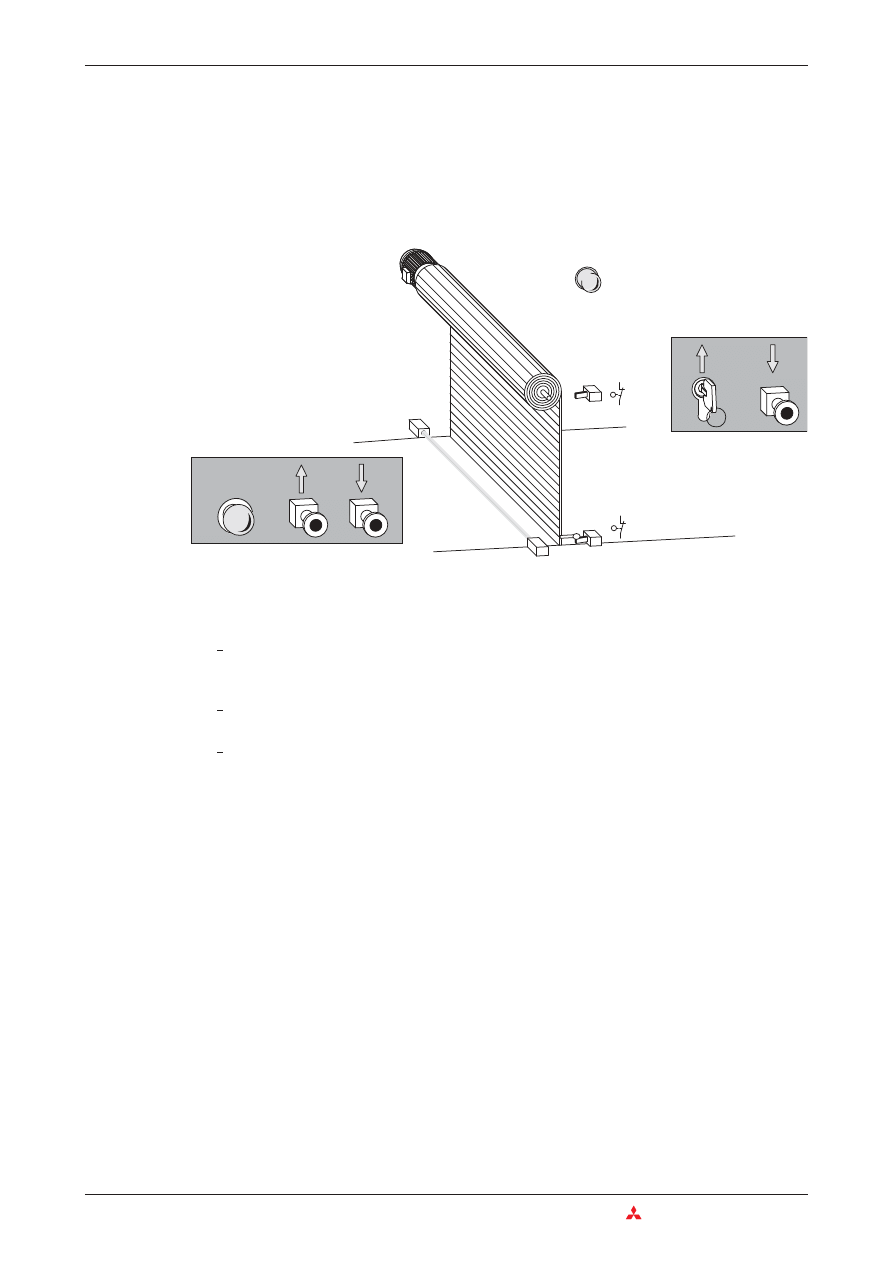
3.6.2
Brama ze zwijaną żaluzją
Opis zadania
Chcemy zrealizować system sterowania do magazynowej bramy ze zwijaną żaluzją, który pozwoli
na łatwą obsługę z wewnątrz i zewnątrz. Z systemem muszą być również zintegrowane rozwiązania
dotyczące bezpieczeństwa.
쎲 Działanie
Musi być możliwość otwierania bramy z zewnątrz za pomocą kluczyka w stacyjce z wyłączni-
kiem S1, oraz zamykanie przyciskiem S5. Wewnątrz hali powinno być możliwe otwarcie bra-
my przyciskiem S2 i zamknięcie przyciskiem S4.
Dodatkowy wyłącznik czasowy musi automatycznie zamknąć bramę, jeśli jest otwarta
dłużej, niż przez 20 sek.
Stany "brama w ruchu" i "brama w nieokreślonym położeniu" muszą być identyfikowane
przez migające światło ostrzegawcze.
쎲 Rozwiązania dotyczące bezpieczeństwa
–
Przycisk STOP (S0) musi zostać tak zainstalowany, aby umożliwiać w każdym czasie niezwłoczne
zatrzymanie ruchu bramy w bieżącym położeniu. Ten wyłącznik STOP nie spełnia jednak funkcji
wyłączania bezpieczeństwa! Sygnał wyłącznika jest tylko przetwarzany przez PLC i nie przełącza
jakichkolwiek zewnętrznych obwodów mocy.
–
Bariera fotoelektryczna (S7) musi być zainstalowana w celu identyfikacji przeszkody
znajdującej się w obszarze bramy. Gdy podczas zamykania bramy zostanie zarejestrowana
przeszkoda, brama musi zostać automatycznie otwarta.
–
Do zatrzymania silnika bramy muszą być zainstalowane dwa wyłączniki krańcowe: gdy brama
osiągnie pozycję całkowitego otwarcia (S3) i całkowitego zamknięcia (S6).
3 – 28
MITSUBISHI ELECTRIC
Oprogramowanie użytkowe w PLC
Wstęp do programowania
STOP
S1
Lampa ostrzegawcza H1
S5
S3
S6
S7
S0
S2
S4
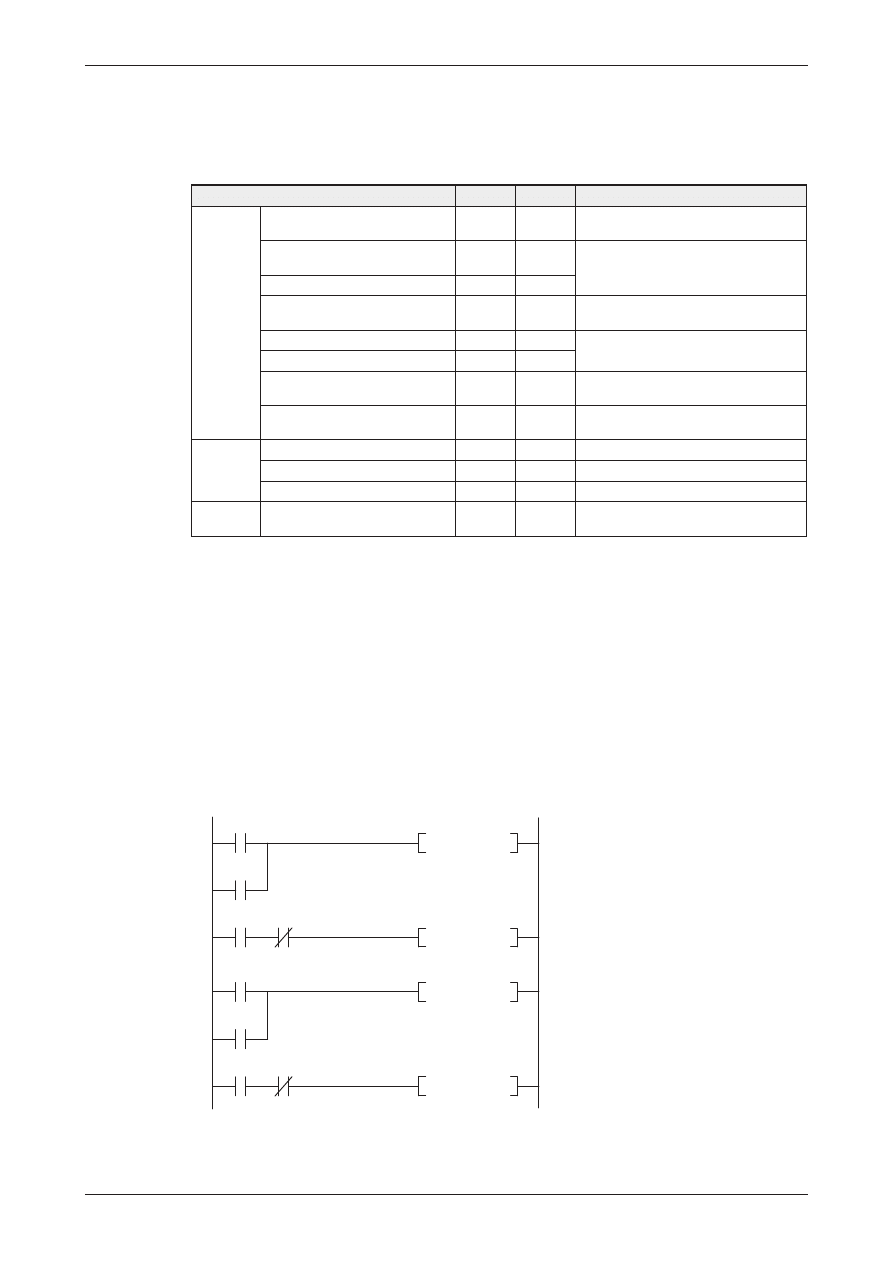
Przydzielenie sygnałów wejściowych i wyjściowych
Opis zadania jasno definiuje niezbędną liczbę wejść i wyjść. Silnik napędzający bramę sterowany jest
za pomocą dwóch wyjść. Wymagane sygnały są przyporządkowane do wejść i wyjść PLC następująco:
Elementy programu
쎲 Obsługa bramy ze zwijaną żaluzją za pomocą dwóch przycisków
Program musi przekształcić sygnały wejściowe do sterowania bramą na dwa rozkazy do napędu sil-
nika: "Otwórz bramę" i "Zamknij bramę" Ponieważ są to sygnały z przycisków, które są na wejściach
tylko chwilowo dostępne, muszą być zapamiętane. Do wykonania tego zastosowano dwa
przekaźniki reprezentujące wejścia w programie, które zależnie od potrzeby są ustawiane lub
kasowane.
–
M1: otwarcie bramy
–
M2: zamknięcie bramy
Podręcznik dla początkujących
3 – 29
Wstęp do programowania
Oprogramowanie użytkowe w PLC
Funkcja
Nazwa
Adres
Uwagi
Wejścia
Przycisk STOP
S0
X0
Styk rozwierny (gdy wyłącznik jest
obsługiwany X0 = „0” i brama zatrzymuje się)
OPEN wyłącznik w stacyjce (na
zewnątrz)
S1
X1
Styki zwierne (NZ)
Przycisk OPEN (wewnątrz)
S2
X2
Górny wyłącznik zbliżeniowy (brama
otwarta)
S3
X3
Styk rozwierny (X2 =”0” gdy brama jest w
górnym położeniu i S3 jest aktywny)
Przycisk CLOSE (wewnątrz)
S4
X4
Styki zwierne (NO)
Przycisk CLOSE (na zewnątrz)
S5
X5
Dolny wyłącznik zbliżeniowy (brama
zamknięta)
S6
X6
Styk rozwierny (X6 = „0” gdy brama jest w
dolnym położeniu i S6 jest aktywny)
Bariera fotoelektryczna
S7
X7
Gdy zostanie zarejestrowana przeszkoda, X7
ustawiany jest na „1”
Wyjścia
Lampa ostrzegawcza
H1
Y0
—
Stycznik silnika (obroty do tyłu)
K1
Y1
Obroty do tyłu = OTWIERANIE bramy
Stycznik silnika (obroty do przodu)
K2
Y2
Obroty do przodu = ZAMYKANIE bramy
Licznik
czasu
Opóźnienie automatycznego
zamknięcia
—
T0
Czas: 20 sekund
PLS
SET
SET
PLS
M100
M1
M2
M200
X001
0
4
7
11
M100
M200
X004
M2
M1
X002
X005
Schemat drabinkowy
Lista instrukcji
0
LD
X001
1
OR
X002
2
PLS
M100
4
LD
M100
5
ANI
M2
6
SET
M1
7
LD
X004
8
OR
X005
9
PLS
M200
11 LD
M200
12 ANI
M1
13 SET
M2
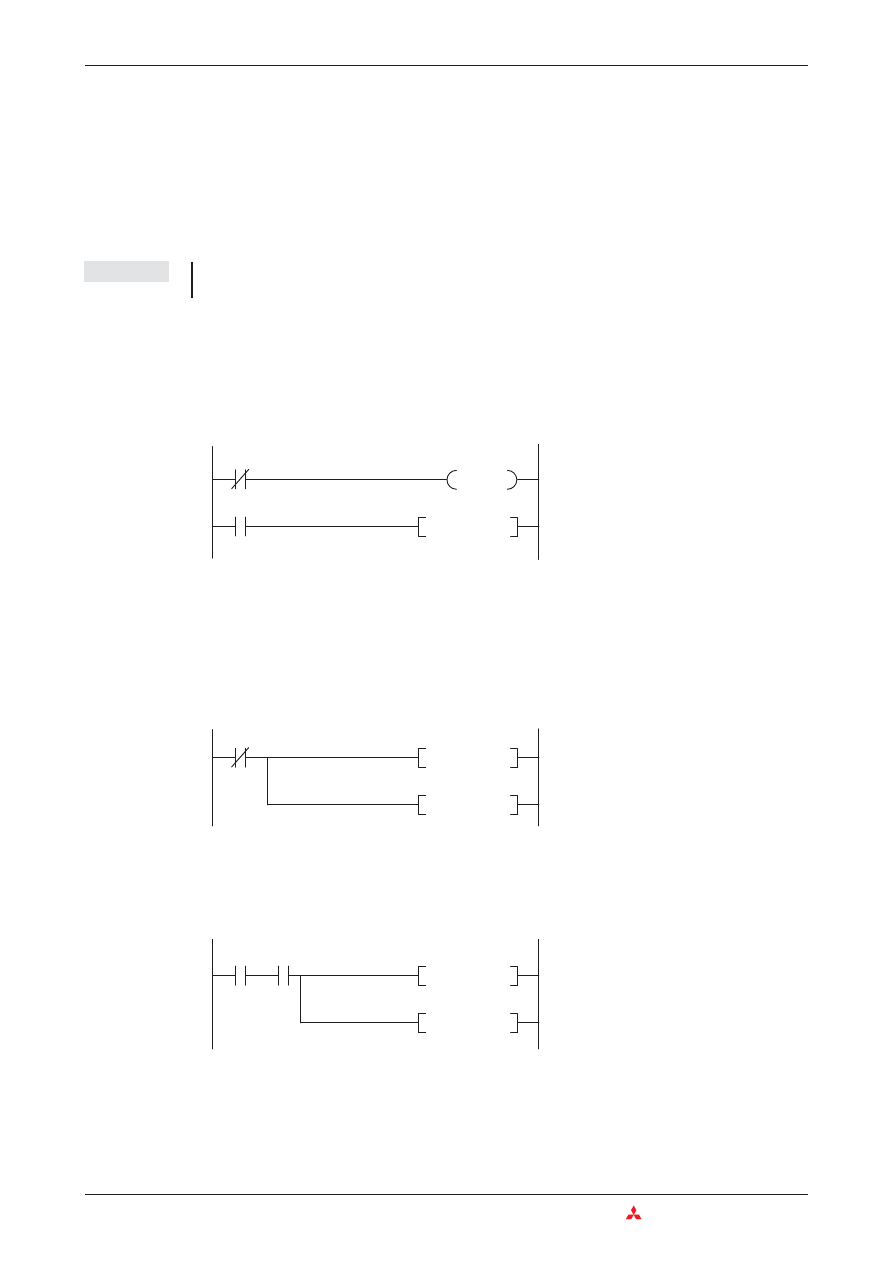
Sygnały do otwarcia bramy przetwarzane są jako pierwsze. Gdy użyty został wyłącznik z kluczykiem
S1 lub przycisk S2, generowany jest sygnał i M001 zostaje ustawiony w stan "1" na czas jednego
cyklu programu. Zapewnia to, że jeśli przycisk sklei się lub operator nie zwolni przycisku, brama nie
zostanie zablokowana.
Musi być zagwarantowane, że napęd może zostać włączony tylko wtedy, gdy nie jest już
przełączony w przeciwnym kierunku. Wykonano to w programie PLC, gdzie M1 może zostać ustaw-
iony wtedy, gdy M2 nie jest ustawiony.
UWAGA
Blokada kierunku obrotów musi być również uzupełniona przez dodatkową blokadę, zbudo-
waną na fizycznych stycznikach, na zewnątrz PLC (zob. schemat okablowania).
Podobne podejście zostało zastosowane przy przetwarzaniu sygnałów z przycisków S4 i S5 do
zamykania bramy. Tutaj M1 zostaje wybrany przy stanie "0", co zapewnia, że obydwa przekaźniki M1
i M2 nie mogą być ustawione w tym samym czasie.
쎲 Automatyczne zamykanie bramy po 20 sekundach
Gdy brama jest otwarta, wyłącznik krańcowy S3 aktywuje się, i wejście X3 zostaje wyłączone. (Dla
bezpieczeństwa S3 jest stykiem rozwiernym.) Gdy to sie stanie, timer T0 zaczyna odmierzać
opóźnienie 20 sek. (K200 = 200 x 0,1s = 20s). Gdy timer osiągnie 20 sek., przekaźnik M2 jest ustawiany i
brama zostaje zamknięta.
쎲 Zatrzymanie bramy wyłącznikiem STOP
Naciskając przycisk STOP (S0) kasujemy przekaźniki M1 i M2, zatrzymując silnik bramy.
쎲 Identyfikacja przeszkód za pomocą bariery fotoelektrycznej
Jeśli podczas zamykania bramy, przeszkoda zostanie zarejestrowana za pomocą bariery fotoelektr-
ycznej, przekaźnik M2 jest kasowany i operacja zamykania zostaje zatrzymana. Po tym przekaźnik
M1 jest ustawiany, powodując ponowne otwarcie bramy.
3 – 30
MITSUBISHI ELECTRIC
Oprogramowanie użytkowe w PLC
Wstęp do programowania
SET
M2
T0
K200
18
14
T0
X003
Schemat drabinkowy
Lista instrukcji
14 LDI
X003
15 OUT
T0
K200
18 LD
T0
19 SET
M2
RST
RST
M1
M2
20
X000
Schemat drabinkowy
Lista instrukcji
20 LDI
X000
21 RST
M1
22 RST
M2
RST
SET
M2
M1
23
X007
M2
Schemat drabinkowy
Lista instrukcji
23 LD
X007
24 AND
M2
25 RST
M2
26 SET
M1
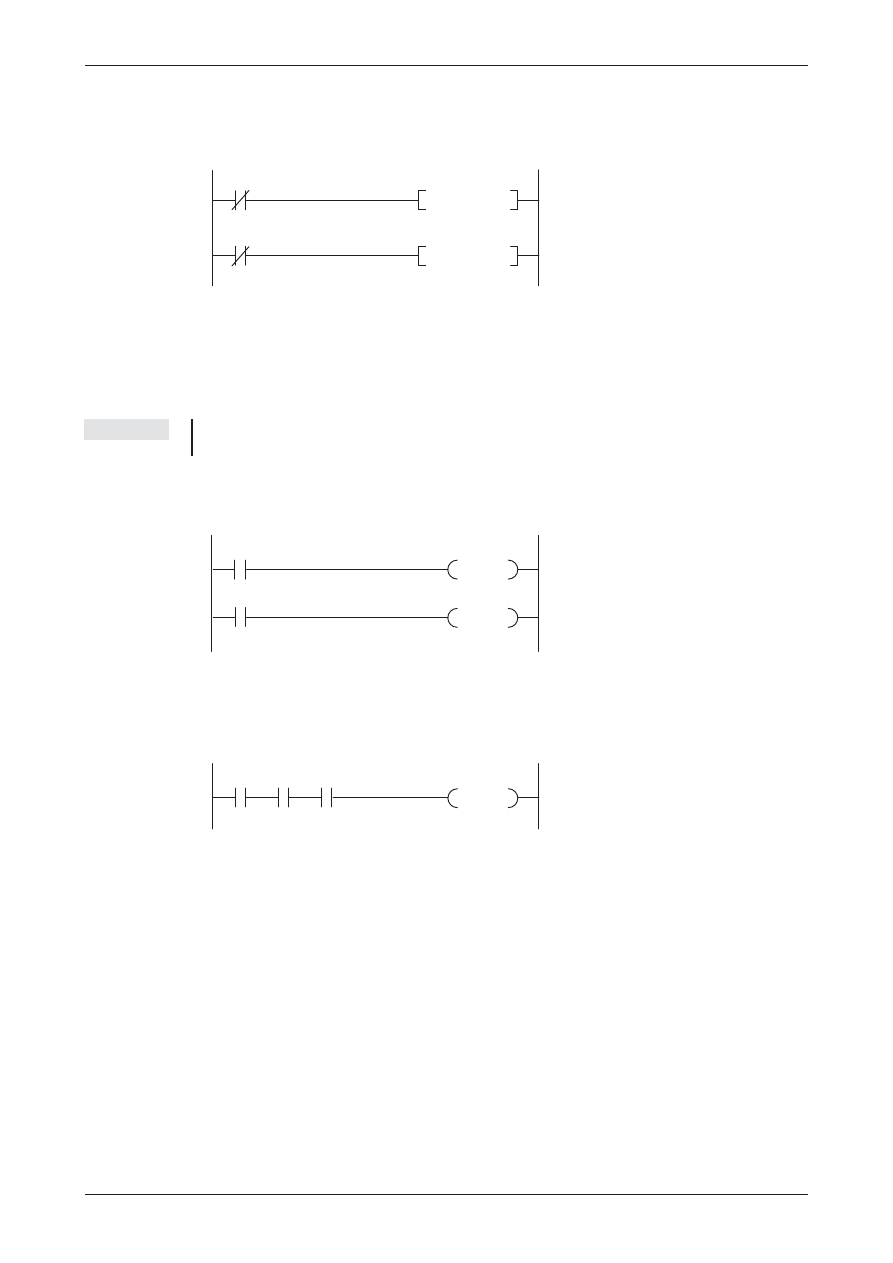
쎲 Wyłączanie silnika za pomocą wyłączników krańcowych
Gdy brama jest otwarta, wyłącznik krańcowy S3 aktywuje się i wejście X3 zostaje wyłączone. Kasuje
to przekaźnik M1, wyłączając silnik. Gdy brama jest całkowicie zamknięta, S6 jest aktywny, X6 jest
wyłączony i M2 jest skasowany, wyłączając silnik. Dla bezpieczeństwa wyłączniki krańcowe są sty-
kami rozwiernymi. Zapewnia to , że jeśli połączenie pomiędzy wyłącznikiem i wejściem zostanie
przerwane, silnik jest również automatycznie wyłączany (lub nie może być załączony).
UWAGA
Wyłączniki krańcowe muszą być podłączone tak, że bez pomocy PLC również wyłączają automa-
tycznie silnik (zob. schemat połączeń).
쎲 Sterowanie silnikiem
Na końcu programu stany sygnałów przekaźników M1 i M2 przekazywane są do wyjść Y001 i Y002.
쎲 Lampa ostrzegawcza: "Brama w ruchu" i "Brama w nieokreślonym położeniu"
Jeśli żaden z wyłączników krańcowych nie jest aktywny, oznacza to, że brama jest w trakcie otwier-
ania lub zamykania, albo znajduje się w położeniu pośrednim. We wszystkich tych sytuacjach lampa
ostrzegawcza miga. Prędkość migania sterowana jest za pomocą specjalnego przekaźnika M8013,
który w odstępach 1 sek. jest automatycznie ustawiany i kasowany (zob. rozdział 4.2).
Podręcznik dla początkujących
3 – 31
Wstęp do programowania
Oprogramowanie użytkowe w PLC
RST
RST
M1
M2
27
29
X003
X006
Schemat drabinkowy
Lista instrukcji
27 LDI
X003
28 RST
M1
29 LDI
X006
30 RST
M2
Y001
Y002
31
33
M1
M2
Schemat drabinkowy
Lista instrukcji
31 LD
M1
32 OUT
Y001
33 LD
M2
34 OUT
Y002
Y000
35
X003 X006 M8013
Schemat drabinkowy
Lista instrukcji
35 LD
X003
36 AND
X006
37 AND
M8013
38 OUT
Y000
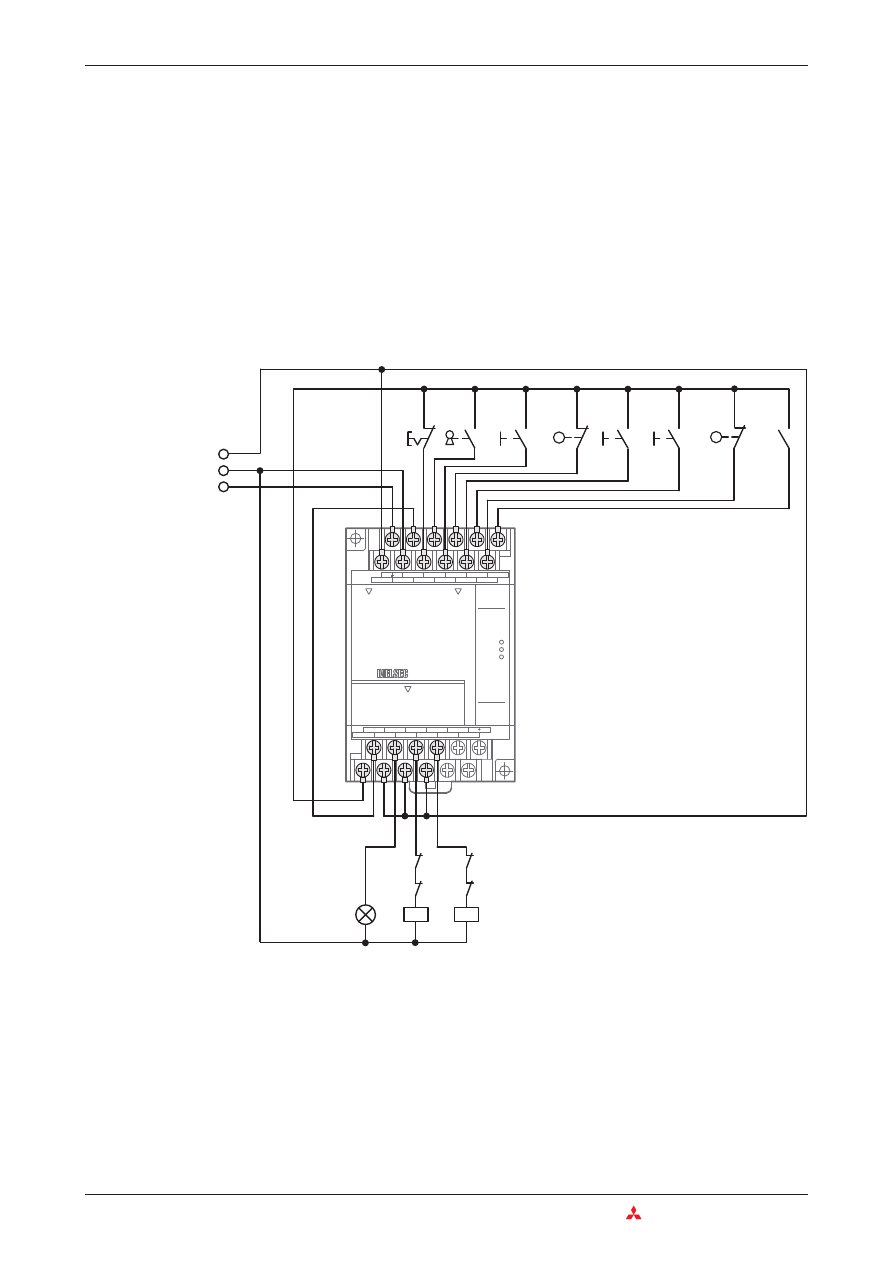
Połączenie PLC
System sterowania bramy ze zwijaną żaluzją, może być zbudowany w oparciu o sterownik typu
FX1N-14MR.
3 – 32
MITSUBISHI ELECTRIC
Oprogramowanie użytkowe w PLC
Wstęp do programowania
MITSUBISHI
POWER
RUN
ERROR
FX -14MR
1S
0 1 2 3
4 5 6 7
0 1 2 3
4 5
IN
100-240
VAC
14MR
-ES/UL
L
N
S/S
X0
X1
X2
X3
X4
X5
X6
X7
OUT
24V
COM0
Y0
0V
COM1
Y1
COM2
Y2
Y3
Y4
Y5
S/S 0 V
24 V
N
PE
L1
S3
S4
S2
S5
S6
S7
S0
K2
K1
S3
S6
K1
K2
H1
S1
Blokada na stycznikach
Dezaktywacja przez wyłączniki krańcowe
Lampa
ostr
zegawcza
Otwar
cie
bramy
Zamknięcie
bramy
STOP
Otwar
cie
bramy
(z
zewnątr
z)
Otwar
cie
bramy
(z
wewnątr
z)
Górny
w
yłącznik
krańcowy
Zamknięcie
bramy
(z
wewnątr
z)
Zamknięcie
bramy
(z
zewnątr
z)
Dolny
w
yłącznik
krańcowy
Bar
ier
a
fotoelektryczna
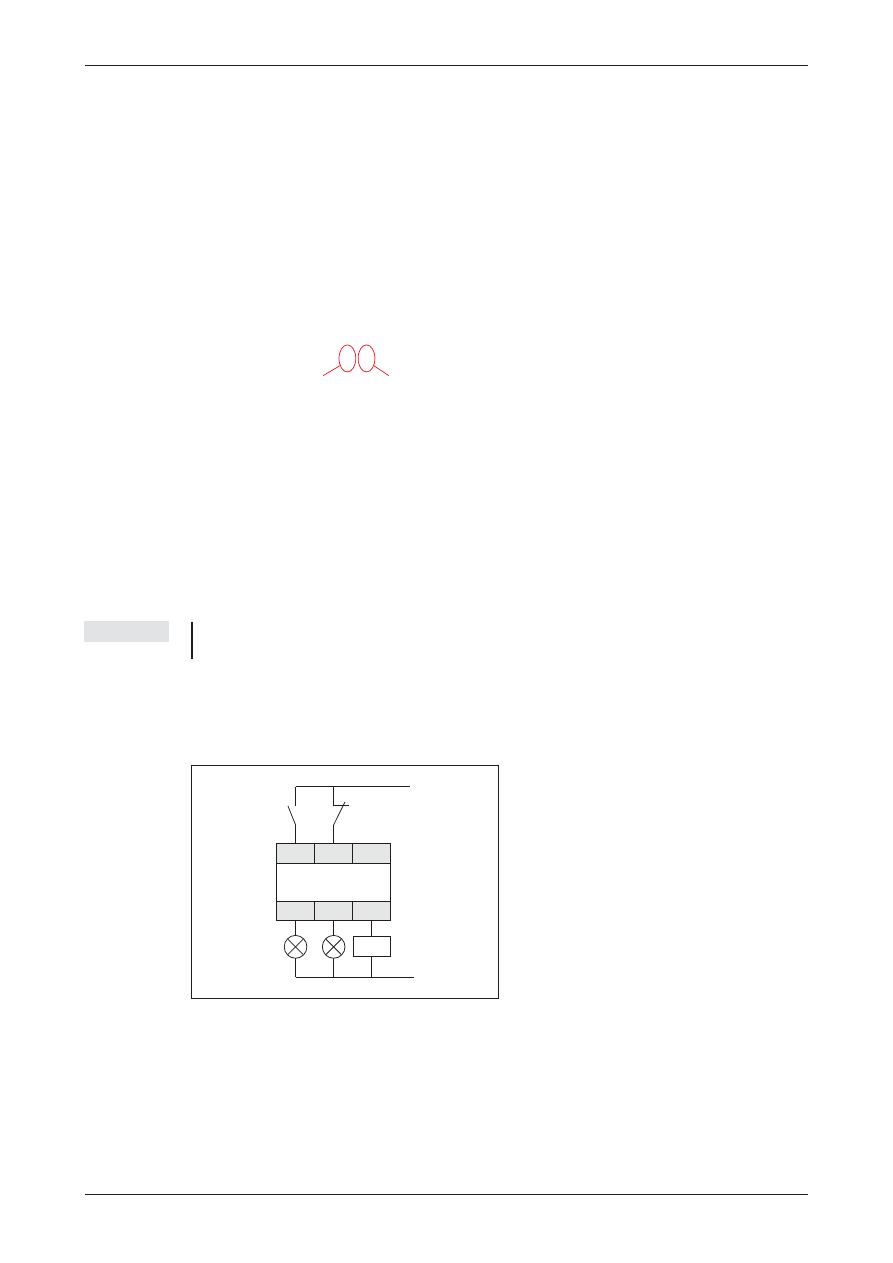
4
Szczegółowy opis urządzeń
Urządzenia w PLC używane są bezpośrednio w instrukcjach programu sterującego. Ich sygnały
stanu mogą być zarówno odczytywane jak i zmieniane przez program PLC. Nazwa urządzenia
składa się z dwóch części:
–
nazwy urządzenia i
–
adresu urządzenia.
4.1
Wejścia i wyjścia
Wejścia i wyjścia sterownika PLC łączą go z obsługiwanym procesem. Gdy wejście jest wybierane
przez program PLC, mierzone jest napięcie na zaciskach wejściowych sterownika. Ponieważ wejścia
te są typu cyfrowego, mogą przybierać tylko dwa stany: ON lub OFF. Gdy napięcie na zacisku wejśc-
iowym osiągnie 24V, wejście jest włączone (stan "1"). Jeśli napięcie wejściowe jest mniejsze od 24V,
wejście traktowane jest jako wyłączone (stan "0").
W sterownikach MELSEC PLC, identyfikator “X” używany jest dla wejść. To samo wejście może być
wybierane w tym samym programie tak często, jak to jest potrzebne.
UWAGA
PLC nie może zmieniać stanu wejść. Na przykład, nie jest możliwe wykonanie instrukcji OUT na
urządzeniu wejściowym.
Jeśli instrukcja wyjściowa wykonywana jest dla wyjścia, wynik bieżącej operacji (stan sygnału) sto-
sowany jest do zacisku wyjściowego PLC. Jeśli jest to wyjście przekaźnikowe, przekaźnik zwiera
styki (wszystkie przekaźniki mają styki zwierne). Jeśli jest to wyjście tranzystorowe, tranzystor
wykonuje połączenie i atywuje podłączony obwód.
Identyfikatorem dla urządzeń wyjściowych jest “Y”. Wyjścia mogą być użyte zarówno w instrukcjach
operacji logicznych, jak i w instrukcjach wyjściowych. Należy jednak pamiętać, że dla tego samego
wyjścia, nie wolno nigdy użyć instrukcji wyjścia więcej, niż jeden raz (zob. również dział 3.4.2.).
Podręcznik dla początkujących
4 – 1
Szczegółowy opis urządzeń
Wejścia i wyjścia
X000 X001
Y000 Y001
X002
Y002
Ilustracja z lewej strony pokazuje, w jaki sposób
można podłączyć wyłączniki do wejść oraz
lampki i styczniki do wyjść MELSEC PLC.
X 0
Adres urządzenia
Nazwa urządzenia
Przykład nazwy urządzenia (np. wejście 0):
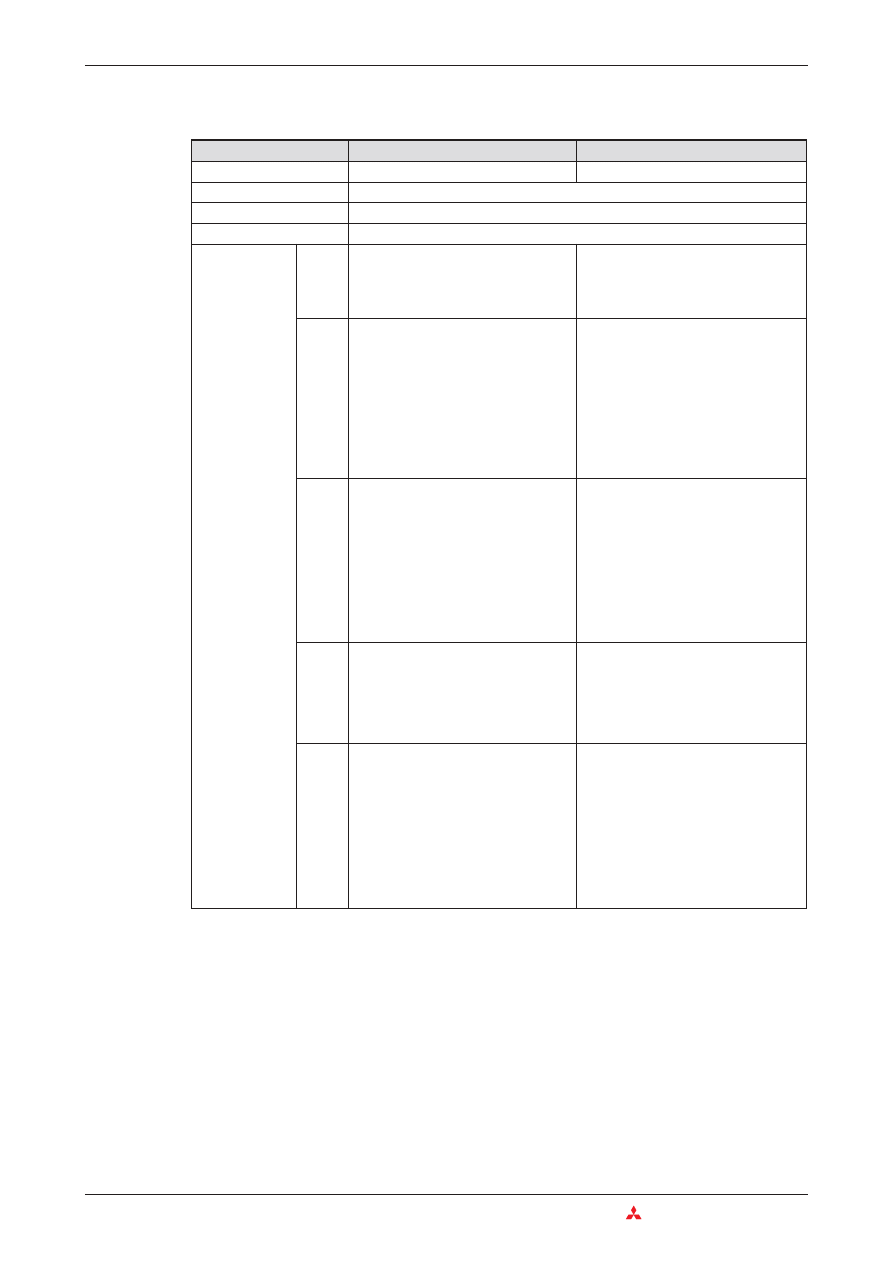
Poniższa tabela zawiera ogólny przegląd wejść i wyjść sterowników rodziny MELSEC FX.
*
Całkowita liczba wejść, może zostać zwiększona za pomocą modułów rozszerzających do maks. 248 (X367). Jednak suma
wszystkich wejść i wyjść nie może przekroczyć 256.
4 – 2
MITSUBISHI ELECTRIC
Wejścia i wyjścia
Szczegółowy opis urządzeń
Urządzenie
Wejścia
Wyjścia
Identyfikator urządzenia
X
Y
Typ urządzenia
Urządzenie bitowe
Dopuszczalne wartości
0 lub 1
Format adresu urządzenia
Ósemkowy
Numery urządzeń i
adresy (zależy od
typu jednostki
centralnej
sterownika)
FX1S
6 (X00–X05)
8 (X00–X07)
12 (X00–X07, X10, X11, X12, X13)
16 (X00–X07, X10–X17)
4 (Y00–Y03)
6 (Y00–Y05)
8 (Y00–Y07)
14 (Y00–Y07, Y10–Y15)
FX1N
8 (X00–X07)
14 (X00–X07, X10–X15)
24 (X00–X07, X10–X17, X20–X27)
36 (X00–X07, X10–X17, X20–X27,
X30–X37, X40, X41, X42, X43)
Całkowita liczba wejść, może zostać
zwiększona za pomocą modułów
rozszerzających do maks. 84 (X123).
Jednak suma wszystkich wejść i wyjść nie
może przekroczyć 128.
6 (Y00–Y05)
10 (Y00–Y07, Y10, Y11)
16 (Y00–Y07, Y10–Y17)
24 (Y00–Y07, Y10–Y17, Y20–Y27)
Całkowita liczba wyjść, może zostać
zwiększona za pomocą modułów
rozszerzających do maks. 64 (Y77). Jednak
suma wszystkich wejść i wyjść nie może
przekroczyć 128.
FX2N
8 (X00–X07)
16 (X00–X07, X10–X17)
24 (X00–X07, X10–X17, X20–X27)
32 (X00–X07, X10–X17, X20–X27,
X30–X37)
40 (X00–X07, X10–X17, X20–X27,
X30–X37, X40–X47)
64 (X00–X07, X10–X17, X20–X27,
X30–X37, X40–X47, X50–X57,
X60–X67, X70–X77)
8 (Y00–Y07)
16 (Y00–Y07, Y10–Y17)
24 (Y00–Y07, Y10–Y17, Y20–Y27)
32 (Y00–Y07, Y10–Y17, Y20–Y27,
Y30–Y37)
40 (Y00–Y07, Y10–Y17, Y20–Y27,
Y30–Y37, Y40–Y47)
64 (Y00–Y07, Y10–Y17, Y20–Y27,
Y30–Y37, Y40–Y47, Y50–Y57,
Y60–Y67, Y70–Y77)
FX2NC
8 (X00–X07)
16 (X00–X07, X10–X17)
32 (X00–X07, X10–X17, X20–X27,
X30–X37)
48 (X00–X07, X10–X17, X20–X27,
X30–X37, X40–X47, X50–X57)
8 (Y00–Y07)
16 (Y00–Y07, Y10–Y17)
32 (Y00–Y07, Y10–Y17, Y20–Y27, Y30–Y37)
48 (Y00–Y07, Y10–Y17, Y20–Y27,
Y30–Y37, Y40–Y47, X50–X57)
FX3U
8 (X00–X07)
16 (X00–X07, X10–X17)
24 (X00–X07, X10–X17, X20–X27)
32 (X00–X07, X10–X17, X20–X27,
X30–X37)
40 (X00–X07, X10–X17, X20–X27,
X30–X37, X40–X47)
64 (X00–X07, X10–X17, X20–X27,
X30–X37, X40–X47, X50–X57,
X60–X67, X70–X77)
8 (Y00–Y07)
16 (Y00–Y07, Y10–Y17)
24 (Y00–Y07, Y10–Y17, Y20–Y27)
32 (Y00–Y07, Y10–Y17, Y20–Y27,
Y30–Y37)
40 (Y00–Y07, Y10–Y17, Y20–Y27,
Y30–Y37, Y40–Y47)
64 (Y00–Y07, Y10–Y17, Y20–Y27,
Y30–Y37, Y40–Y47, Y50–Y57,
Y60–Y67, Y70–Y77)
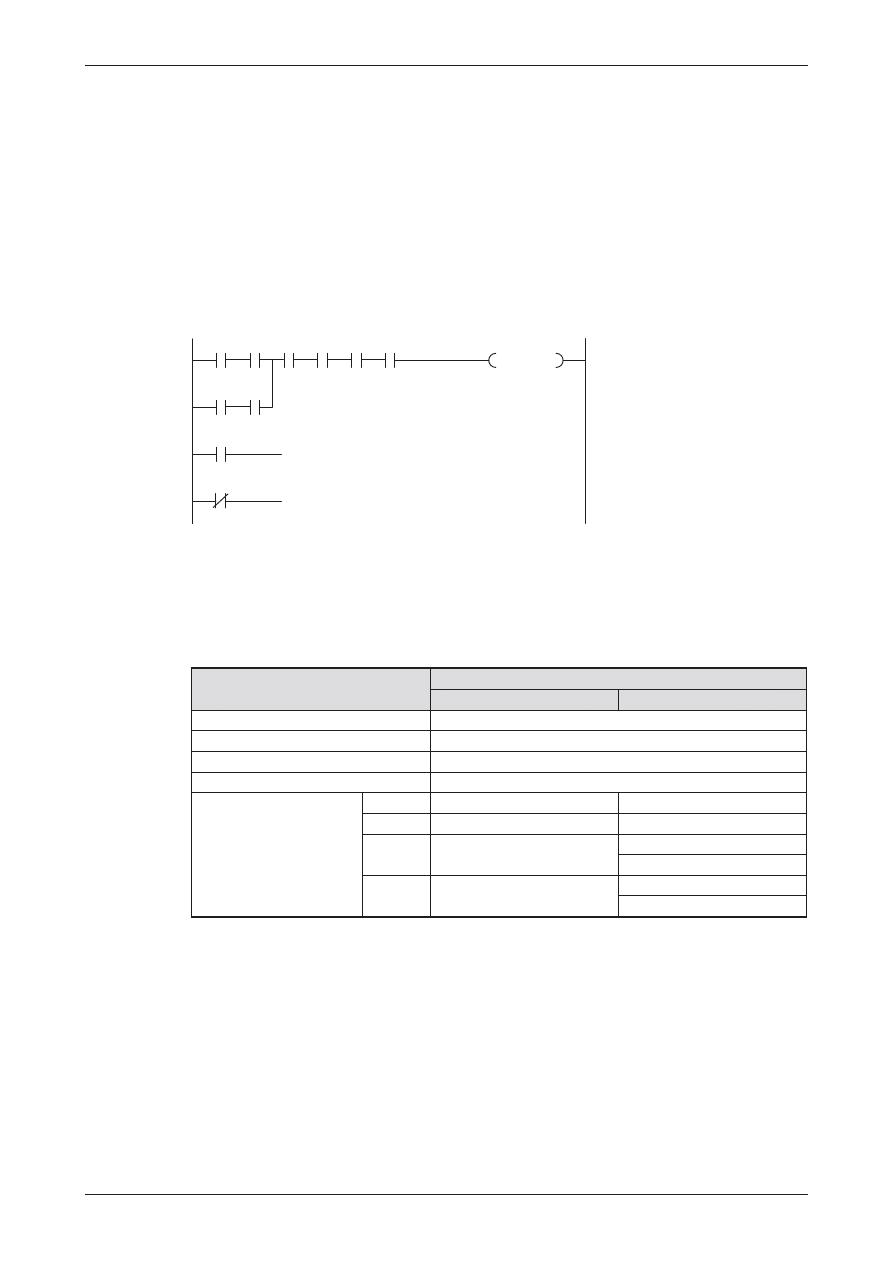
4.2
Przekaźniki
W programach PLC, często zachodzi potrzeba czasowego przechowania pośrednich, dwójkowych
wyników (stan sygnału "0" lub "1"), w celu późniejszego odwołania się do nich. PLC ma specjalne,
dostępne do tego celu komórki pamięci, znane jako "przekaźniki pomocnicze" lub krócej "przeka-
źniki" (identyfikator urządzenia: "M").
Do przekaźnika można wpisać dwójkowy wynik działania, np. instrukcją OUT, a następnie użyć ten
wynik do następnych operacji. Przekaźniki ułatwiają czytanie programu, jak również zmniejszają
liczbę kroków programu. W przekaźniku można zapisać wynik działania, który ma być używany wie-
lokrotnie, a następnie, w pozostałej części programu wybierać go tak często, jak jest to potrzebne.
Niezależnie od normalnych przekaźników, sterowniki FX mają również przekaźniki podtrzym-
ywane lub "zatrzaskowe". Po wyłączeniu zasilania PLC, wszystkie normalne niezatrzaskiwane prz-
ekaźniki są kasowane do stanu "0" i gdy sterownik zostanie załączony jest to również ich normalny
stan. W przeciwieństwie do tego przekaźniki zatrzaskowe zachowują swój aktualny stan, gdy zasil-
anie zostanie wyłączone i ponownie załączone.
���
Za pomocą parametrów PLC można rónież skonfigurować te przekaźniki jako zatrzaskowe.
���
Za pomocą parametrów PLC można rónież skonfigurować te przekaźniki jako niezatrzaskowe.
4.2.1
Przekaźniki specjalne
Dodatkowo do przekaźników, które można włączać i wyłączać za pomocą programu PLC, dostęne
są również przekaźniki innej klasy, znane jako specjalne lub diagnostyczne. Przekaźniki te rozpoc-
zynają swój zakres adresów od M8000. Niektóre zawierają informacje o stanie systemu, a inne mogą
mieć wpływ na wykonanie programu. Kolejna tabela pokazuje kika przykładów spośród wielu
dostępnych przekaźników specjalnych.
Podręcznik dla początkujących
4 – 3
Szczegółowy opis urządzeń
Przekaźniki
Urządzenie
Rodzaje przekaźników
Przekaźniki niezatrzaskowe
Przekaźniki zatrzaskowe
Identyfikator urządzenia
M
Typ urządzenia
Urządzenie bitowe
Dopuszczalne wartości urządzenia
0 lub 1
Format adresu urządzenia
Dziesiętny
Liczba urządzeń i adresy
FX1S
384 (M0–M383)
128 (M384–M511)
FX1N
384 (M0–M383)
1152 (M384–M1535)
FX2N
FX2NC
500 (M0–M499)1
524 (M500–M1023)2
2048 (M1024–M3071)
FX3U
500 (M0–M499)1
524 (M500–M1023)2
6656 (M1024–M7679)
M1
M1
M1
Wybierany stanem sygnału “1”
(ustawiony przekaźnik)
Wybierany stanem sygnału “0”
(czy przekaźnik został skasowany?)
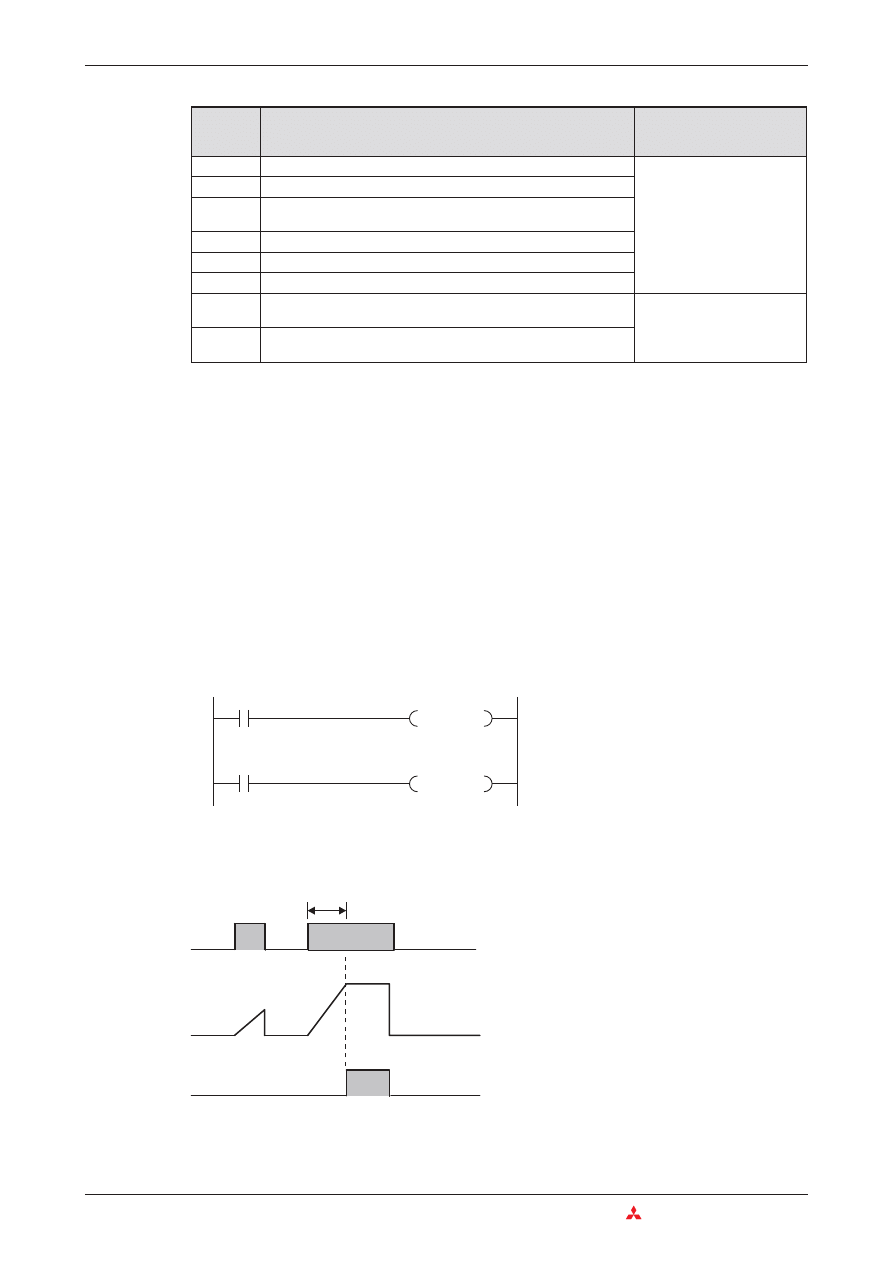
4.3
Timery
Podczas sterowania procesem często zachodzi potrzeba zaprogramowania określonego opóźni-
enia zanim rozpocznie się lub zakończy właściwa operacja. W sterownikach sprzętowych jest to
uzyskiwane za pomocą przekaźników czasowych. W sterownikach PLC z kolei przy pomocy wewnę-
trznych, programowalnych timerów.
W rzeczywistości timery są właśnie licznikami, które zliczają sygnały wewnętrznego zegara PLC (np.
impulsy 0,1sek.). Gdy wartość licznika osiągnie wartość zadaną, wyjście timera zostaje załączone.
Wszystkie funkcje timerów, jak opóźnione załączenie, aktywowane są sygnałem “1”. Uruchomienie i
kasowanie timerów programowane jest w ten sam sposób, jak wyjścia. W programie można wyb-
ierać i używać wyjścia timerów dowolnie często.
W powyższym przykładzie, timer T200 uruchamiany jest po załączeniu wejścia X0. Wartość zadana
wynosi 123 x 10ms = 1,23 sek., tak więc T200 załącza wyjście Y0 z opóźnieniem 1,23 sek. Sekwencja
sygnałów wytwarzanych przez kolejny przykład programu, jest następująca:
Wartość zadaną dla timera można również określić pośrednio, za pomocą wartości dziesiętnej
zapisanej w rejestrze danych. Zob. szczegóły w dziale 4.6.1 .
4 – 4
MITSUBISHI ELECTRIC
Timery
Szczegółowy opis urządzeń
X0
T200
T200
Y0
K123
0
4
Schemat drabinkowy
Lista instrukcji
0
LD
X0
1
OUT
T200
K123
4
LD
T200
5
OUT
Y0
X0
T200
Y0
1,23 s
Tak długo, jak długo X0 pozostanie załączony,
timer kontynuuje zliczanie wewnętrznych
impulsów 10 ms. Gdy wartość zadana zostanie
przekroczona, załączy się wyjście T200.
Jeśli wejście X0 lub zasilanie PLC zostaną
wyłączone, timer zostanie wyzerowany i jego
wyjście również zostanie wyłączone.
Przekaźni
k
s p e-
cjalny
Funkcja
Opcje działania programu
M8000
Przekaźnik ten jest zawsze w stanie „1”, gdy PLC jest w trybie RUN.
Wybieranie stanu sygnału
M8001
Przekaźnik ten jest zawsze w stanie „0”, gdy PLC jest w trybie RUN.
M8002
Impuls początkowy (po uaktywnieniu trybu RUN, przekaźnik ten
ustawiany jest w stan „1”, na czas trwania jednego cyklu programu.
M8004
Błąd PLC
M8005
Niskie napięcie baterii
M8013
Impuls sygnału zegarowego: 1 sekunda
M8031
Kasuje wszystkie urządzenia (z wyjątkiem rejestrów D), które nie zostały
zarejestrowane jako podtrzymywane bateryjnie.
Wybieranie stanu sygnału
Ustawianie stanu sygnału
M8034
Blokada wyjść – wyjścia PLC pozostają wyłączone, lecz program
kontynuuje działanie.
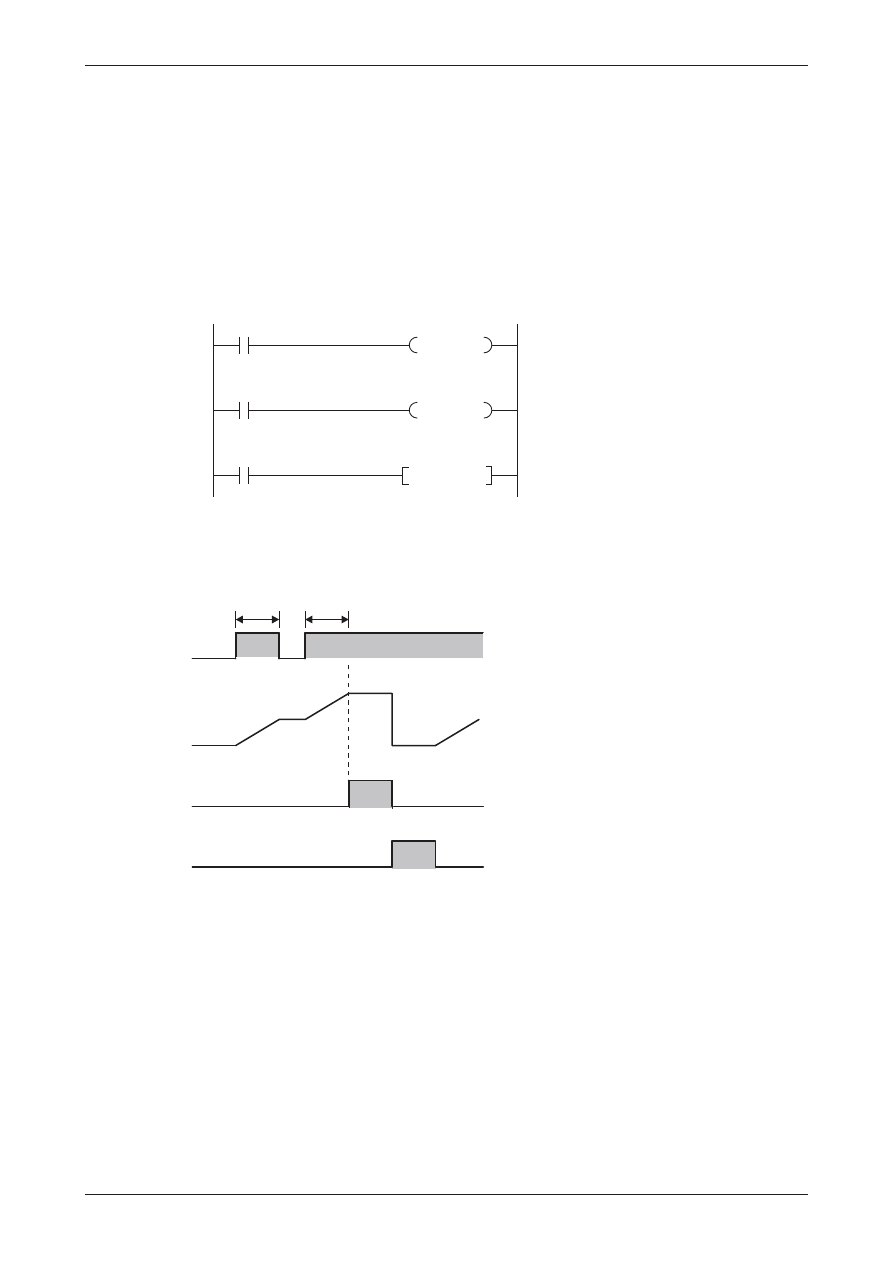
Timery podtrzymujące
Niezależnie od normalnych timerów opisanych powyżej, sterowniki serii FX
1N
, FX
2N
, FX
2NC
i FX
3U
mają również timery podtrzymujące, które zachowują swoją bieżącą wartość licznika czasu, nawet
wtedy, jeśli urządzenie sterujące timer zostanie wyłączone.
Bieżąca wartość licznika czasu zapisywana jest do pamięci, która jest podtrzymywana nawet w przy-
padku awarii zasilania.
Przykład programu wykorzystującego podtrzymywany timer:
Timer T250 zostaje uruchomiony, gdy włączone jest wejście X0. Wartość zadana wynosi 345 x 0,1 sek. =
34,5 sek. Gdy wartość zadana zostanie przekroczona, T250 włącza wyjście Y1. Wejście X2 kasuje timer i
wyłącza jego wyjście.
Podręcznik dla początkujących
4 – 5
Szczegółowy opis urządzeń
Timery
X1
T250
T250
Y1
K345
X2
T250
RST
0
4
6
Schemat drabinkowy
Lista instrukcji
0
LD
X0
1
OUT
T250
K345
4
LD
T250
5
OUT
Y1
6
LD
X2
7
RST
T250
Gdy wejście X1 jest załączone, timer zlicza
wewnętrzne impulsy 100 ms. Gdy X1 jest
wyłączone, bieżący czas licznika czasu jest
zachowany. Gdy wartość bieżąca osiągnie
zadaną wartość licznika czasu, wyjście timera
zostanie załączone.
Do wykasowania timera musi zostać zaprogra-
mowana odrębna instrukcja, ponieważ nie jest
on kasowany przez wyłączenie wejścia X1 czy
też zasilania PLC. Wejście X2 kasuje timer T250
i wyłącza jego wyjście.
T250
t1
t2
X1
Y1
X2
t1 + t2 = 34,5 s
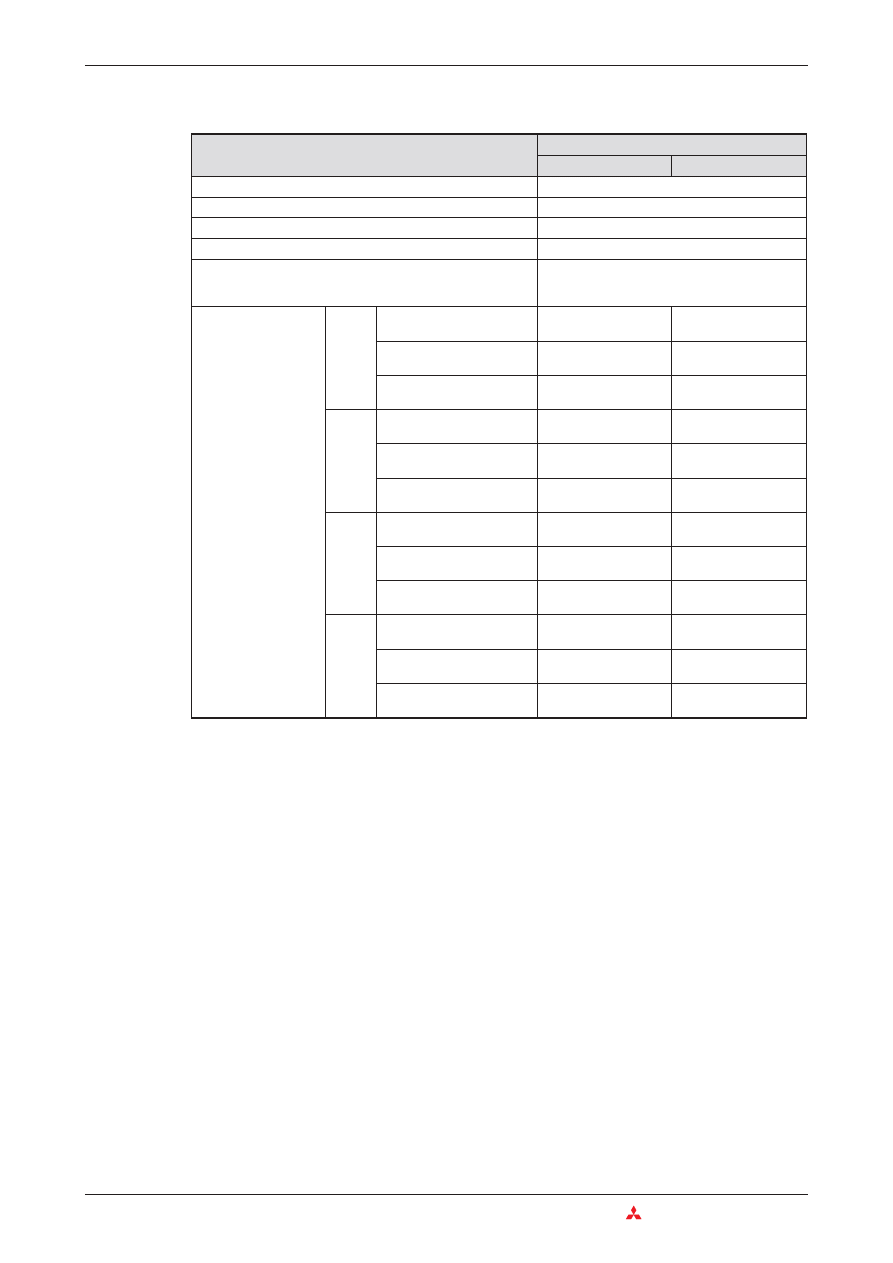
Timery w jednostkach centralnych rodziny MELSEC FX
*
Timery te dostępne są wtedy, gdy ustawiony jest specjalny przekaźnik M8028. W ten sposób, całkowita liczba timerów 100
ms jest zmniejszana do 32 (T0 - T31).
4 – 6
MITSUBISHI ELECTRIC
Timery
Szczegółowy opis urządzeń
Urządzenie
Rodzaje przekaźników czasowych
Normalne
Podtrzymywane
Identyfikator urządzenia
T
Typ urządzenia (do ustawiania i wybierania)
Urządzenie bitowe
Dopuszczalne wartości (wyjście timera)
0 lub 1
Format adresu urządzenia
Dziesiętny
Wprowadzanie wartości nastawy timera
Jako stała liczba dziesiętna. Wartość zadana może
być wprowadzona do instrukcji bezpośredni lub
pośrednio przez rejestr danych.
Liczba urzą
dzeń i adresy
FX
1S
100 ms
(Zakres od 0,1 do 3276,7 s)
63 (T0–T62)
—
10 ms
(Zakres od 0,01do 327,67 s)
31 (T32–T62)*
—
1 ms
(Zakres od 0,00 do 32,767 s)
1 (T63)
—
FX
1N
100 ms
(Zakres od 0,1 do 3276,7 s)
200 (T0–T199)
6 (T250–T255)
10 ms
(Zakres od 0,01 do 327,67 s)
46 (T200–T245)
—
1 ms
(Zakres od 0,001 do 32,767 s)
4 (T246–T249)
—
FX
2N
FX
2NC
100 ms
(Zakres od 0,1do 3276,7 s)
200 (T0–T199)
6 (T250–T255)
10 ms
(Zakres od 0,01do 327,67 s)
46 (T200–T245)
—
1 ms
(Zakres od 0,001 do 32,767 s)
—
4 (T246–T249)
FX
3U
100 ms
(Zakres od 0,1 do 3276,7 s)
200 (T0–T199)
6 (T250–T255)
10 ms
(Zakres od 0,01 do 327,67 s)
46 (T200–T245)
1 ms
(Zakres od 0,001 do 32,767 s)
256 (T256–T511)
4 (T246–T249)
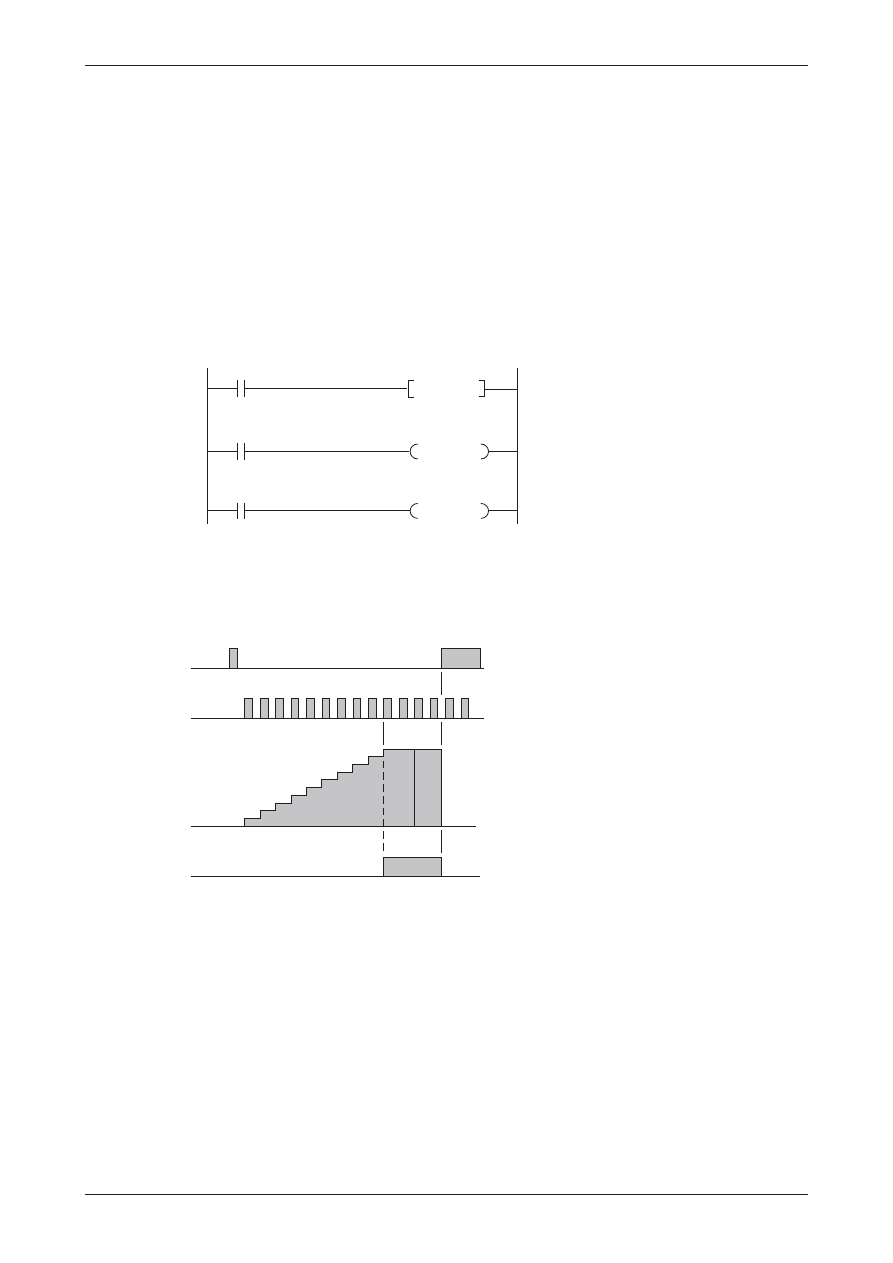
4.4
Liczniki
Programista rodziny FX dysponuje rónież wewnętrznymi licznikami, które mogą być zastosowane
do operacji zliczania.
Liczniki zliczają impulsy, które doprowadzone są programowo do ich wejść. Gdy wartość bieżąca
licznika osiągnie wartość zadaną zdefiniowaną w programie, wyjście licznika zostanie załączone.
Podobnie jak dla timerów, wyjścia liczników mogą być również wybierane i stosowane w programie
dowolnie często.
Przykład programu wykorzystującego licznik:
Jeśli wejście X1 zostanie załączone, wartość licznika C0 zwiększa się o 1. Wyjście Y0 zostanie ustaw-
ione, gdy X1 załączy się i wyłączy 10 razy (wartość zadana licznika wynosi K10).
Sekwencja sygnałów wytworzonych przez ten program jest następująca:
Są dwa rodzaje liczników: 16-bitowe i 32-bitowe. Jak wskazuje ich nazwa, mogą zliczać zarówno do
wartości 16-bitowej jak i 32-bitowej, a ich wartości zadane przechowują odpowiednio liczby
16-bitowe i 32-bitowe. Kolejna tabela pokazuje podstawowe cechy tych liczników.
Podręcznik dla początkujących
4 – 7
Szczegółowy opis urządzeń
Liczniki
X1
C0
K10
X0
C0
RST
C0
Y0
0
3
7
Schemat drabinkowy
Lista instrukcji
0
LD
X0
1
RST
C0
3
LD
X1
4
OUT
C0
K10
7
LD
C0
8
OUT
Y0
Gdy tylko wartość bieżąca licznik osiągnie
wartość zadaną, każdy następny impuls na
wejściu X1 nie powoduje skutku dla licznika.
Najpierw licznik zerowany jest sygnałem z
wejścia X0 i instrukcją RST. Zeruje to wartość
licznika do 0 i wyłącza wyjście licznika.
0
1
2
3
4
5
6
7
8
9
10
X0
X1
Y0
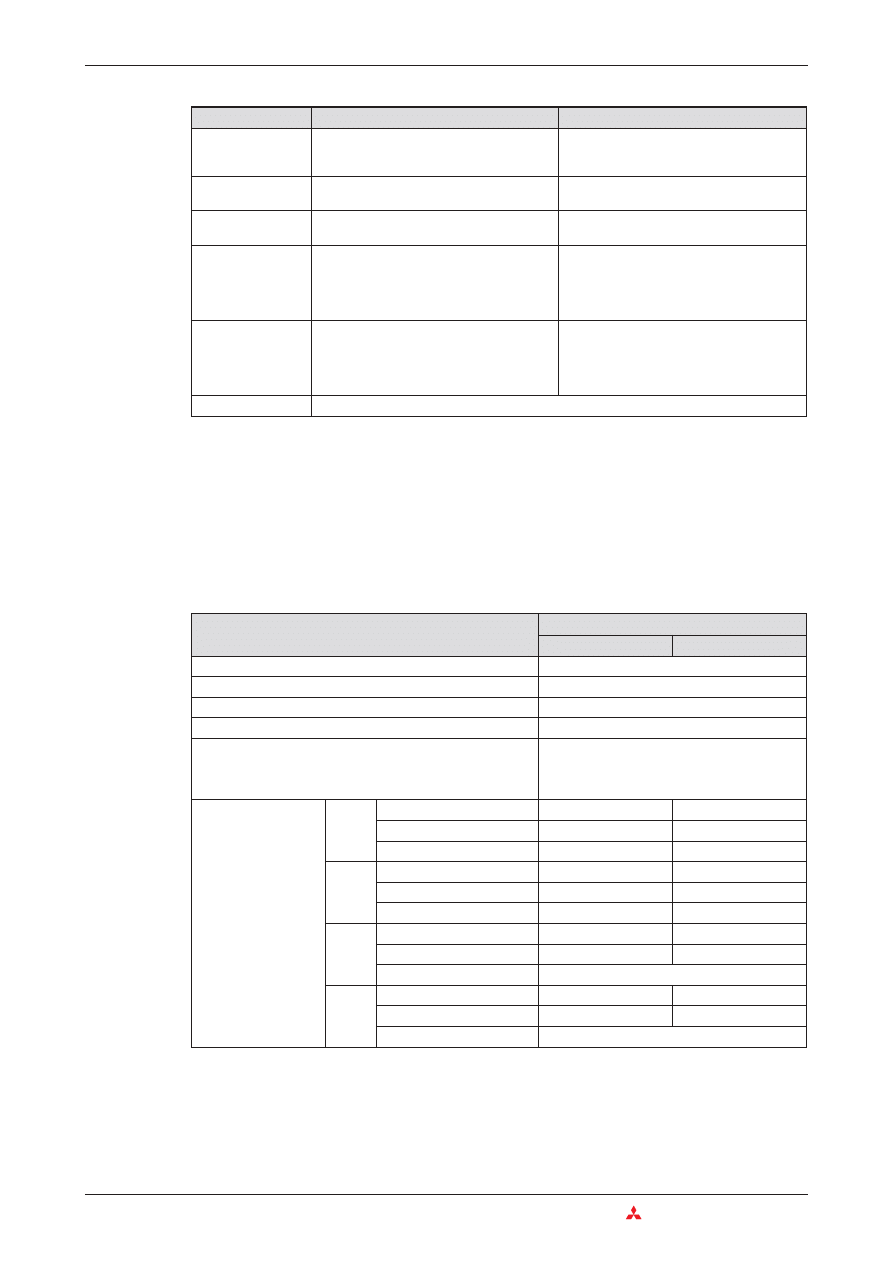
W uzupełnieniu do normalnych liczników, sterowniki rodziny MELSEC FX mają również liczniki szyb-
kie. Są to liczniki 32-bitowe, które mogą przetwarzać szybkie zewnętrzne sygnały licznikowe,
odczytywane na wejściach X0 do X7. W połączeniu z kilkoma specjalnymi instrukcjami, łatwo można
zastosować te liczniki do automatycznych zadań pozycjonujących i innych funkcji.
Liczniki szybkie wykorzystują zasadę przerwania: program PLC jest przerywany i niezwłocznie
reaguje na sygnał licznika. Po szczegółowy opis szybkich liczników odsyłamy do Podręcznika Pro-
gramowania rodziny MELSEC FX.
Przegląd liczników
���
Gdy zasilanie zostanie wyłączone, bieżące wartości w licznikach podtrzymywanych zostają zachowane.
���
Poprzez ustawienie parametrów PLC można skonfigurować liczniki tak, że po wyłączeniu zasilania, ich wartości bieżące
zostaną zachowane.
4 – 8
MITSUBISHI ELECTRIC
Liczniki
Szczegółowy opis urządzeń
Urządzenie
Rodzaje liczników
Normalne
Podtrzymywane
���
Identyfikator urządzenia
C
Typ urządzenia (do ustawiania i wybierania)
Urządzenie bitowe
Dopuszczalne wartości urządzenia (wyjście licznika)
0 lub 1
Format adresu urządzenia
Dziesiętny
Wprowadzanie wartości nastawy licznika
Jako stała liczba dziesiętna. Wartość zadana może być
wprowadzona do instrukcji bezpośrednio lub
pośrednio przez rejestr danych (dla licznika 32
bitowego są to dwa rejestry danych).
Liczba urządzeń
i adresy
FX
1S
Licznik 16 bitowy
16 (C0–C15)
16 (C16–C31)
Licznik 32 bitowy
—
—
Szybki licznik 32
—
21 (C235–C255)
FX
1N
Licznik 16 bitowy
16 (C0–C15)
184 (C16–C199)
Licznik 32 bitowy
20 (C200–C219)
15 (C220–C234)
Szybki licznik 32
—
21 (C235–C255)
FX
2N
FX
2NC
Licznik 16 bitowy
100 (C0–C99)
���
100 (C100–C199)
���
Licznik 32 bitowy
20 (C200–C219)
���
15 (C220–C234)
���
Szybki licznik 32
21 (C235–C255)
���
FX
3U
Licznik 16 bitowy
100 (C0–C99)
���
100 (C100–C199)
���
Licznik 32 bitowy
20 (C200–C219)
���
15 (C220–C234)
���
Szybki licznik 32
21 (C235–C255)
���
Właściwość
Liczniki 16 bitowe
Liczniki 32 bitowe
Kierunek zliczania
Zwiększanie wartości (inkrementowanie)
Zwiększanie i zmniejszanie (kierunek określony
jest przez włączenie lub wyłączenie
specjalnego przekaźnika)
Zakres wartości
zadanej
1 do 32767
-2 147 483 648 do 2 147 483 647
Wprowadzanie
wartości zadanej
Bezpośrednio do instrukcji jako stała dziesiętna
(K), lub pośrednio przez rejestr danych
Bezpośrednio do instrukcji jako stała dziesiętna
(K), lub pośrednio przez parę rejestrów danych
Zachowanie licznika
przy przepełnieniu
Liczy do maks. 32767, po czym wartość licznika
nie ulega zmienie.
Licznik pierścieniowy: po osiągnięciu
2 147 483 647, następna zwiększona wartość
wynosi -2 147 483 648. (gdy zlicza wstecz,
następuje przeskok z -2 147 483 648 do
+2 147 483 647)
Wyjście licznika
Jak tylko wartość zadana zostanie osiągnięta,
wyjście pozostaje załączone.
Podczas inkrementowania, gdy tylko wartość
zadana zostanie osiągnięta, wyjście pozostaje
załączone. Podczas dekrementowania, gdy
tylko wartość obniży się poniżej wartości
zadanej, wyjście zostaje skasowane.
Kasowanie
Instrukcja RST używana jest do kasowania wartości bieżącej licznika i wyłączania wyjścia.
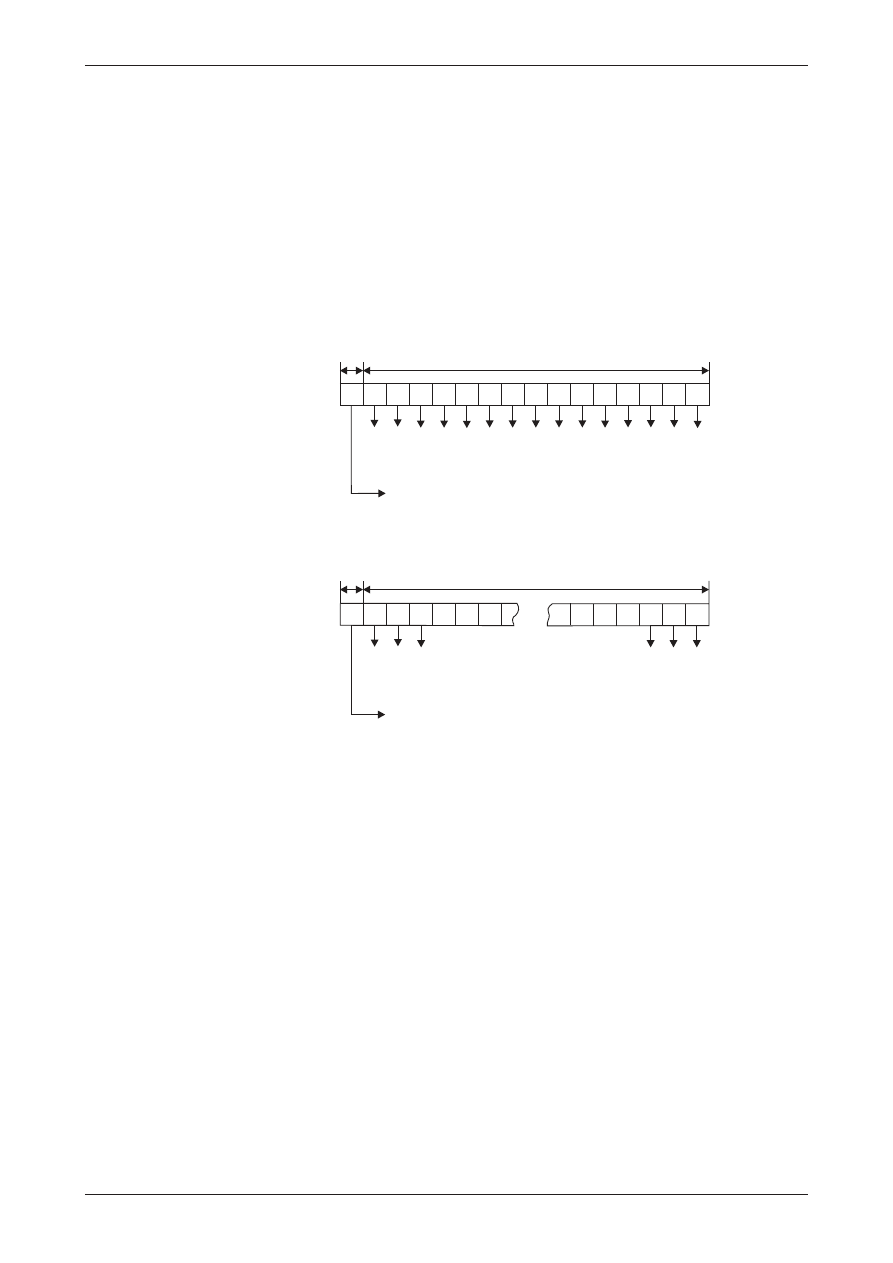
4.5
Rejestry
Przekaźniki PLC używane są do czasowego przechowywania wyników operacji. Jednak przekaźniki
mogą przechowywać tylko wartości ON/OFF lub 1/0, co oznacza, że nie są one przystosowane do
przechowywania pomiarów lub wyników obliczeń. Takie wartości mogą być zapisane w "rejestrach"
sterownika z rodziny FX.
W sterownikach występują rejestry 16-bitowe lub o długości jednego słowa (zob. dział 3.2). Przez
połączenie dwóch kolejnych rejestrów danych, można stworzyć rejestry w postaci "podwójnego
słowa", przechowujące wartości 32-bitowe.
Normalny rejestr może przechwywać wartości od 0000H – FFFFH (-32 768 – 32 767).
Rejestr o podwójnej długości może przechwywać wartości od 00000000H – FFFFFFFFH
(-2 147 483 648 – 2 147 483 647).
Sterowniki z rodziny FX dysponują dużą liczbą instrukcji służących do zarządzania rejestrami.
Można odczytywać i zapisywać wartości z oraz do rejestrów, kopiować zawartość rejestrów, porów-
nywać je i wykonywać funkcje matematyczne na ich zawartości (zob. rozdział 5).
4.5.1
Rejestry danych
W programach PLC rejestry danych mogą być używane jako pamięć. Wartość, którą program wpisze
do rejestru danych, pozostaje zapisana aż do chwili, gdy program ją nadpisze inną wartością.
Gdy używane są instrukcje do manipulowania 32-bitowymi danymi, wystarczy określić adres
16-bitowego rejestru. Bardziej znacząca część 32-bitowej danej, jest automatycznie wpisywana do
następnego w kolejności rejestru. Na przykład, jeśli do przechowania 32-bitowej danej wyznaczony
zostanie rejestr D0, będzie on zawierał bity od 0 do 15, natomiast D1 będzie zawierał bity od 16 do 31.
Podręcznik dla początkujących
4 – 9
Szczegółowy opis urządzeń
Rejestry
0: = wartość dodatnia
1: = wartość ujemna
1 bit znaku
0: = wartość dodatnia
1: = wartość ujemna
>
Rejestr:
16-bitowy
Dana 15-bitowa
1 bit znaku
2
2
2
2
1
0
Rejestr podwójnej
długości:
32-bitowy
2
2
2
30
29
28
. . .
Dana 31-bitowa
. . .
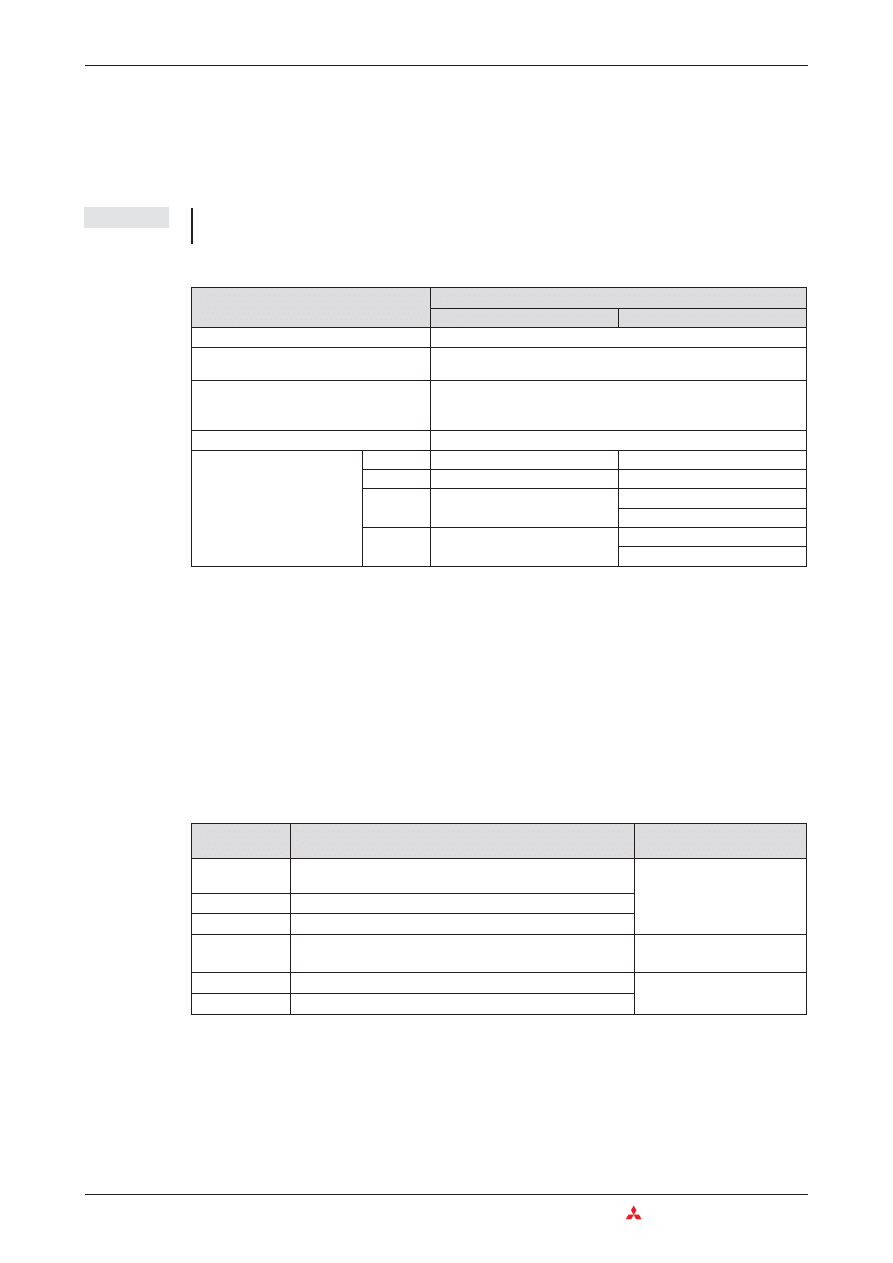
Co się stanie, gdy PLC zostanie wyłączony lub zatrzymany
Do normalnych rejestrów, których zawartość jest tracona po zatrzymaniu PLC lub wyłączeniu zasil-
ania, sterowniki FX mają również rejestry zatrzaskowe, których zawartość zostaje zachowana w
takiej sytuacji.
UWAGA
Gdy specjalny przekaźnik M8033 zostanie ustawiony, po zatrzymaniu PLC zawartość niezatrzaski-
wanych rejestrów danych również nie jest kasowana.
Przegląd rejestrów danych
���
Za pomocą parametrów PLC można również skonfigurować te rejestry jako zatrzaskowe.
���
Za pomocą parametrów PLC można również skonfigurować te rejestry jako niezatrzaskowe.
4.5.2
Rejestry specjalne
Właśnie tak, jak specjalne przekaźniki (rozdział 4.2.1), zaczynające się od adresu M8000, sterowniki
FX mają również specjalne lub diagnostyczne rejestry, których adresy zaczynają się od D8000.
Często występuje również powiązanie pomiędzy specjalnymi przekaźnikami i specjalnymi rejes-
trami. Na przykład, specjalny przekaźnik M8005 pokazuje, że napięcie baterii w PLC jest za niskie, a
odpowiednia wartość napięcia, przechowywana jest w specjalnym rejestrze D8005. Kolejna tabela,
jako przykład, pokazuje niewielki przekrój przez dostępne rejestry specjalne.
Rejestry z zewnętrznie modyfikowaną zawartością
Sterowniki z serii FX1S i FX1N mają dwa zintegrowane potencjometry, za pomocą których można
dostroić zawartość specjalnych rejestrów D8030 i D8031, w zakresie od 0 do 255 (zob. dział 4.6.1).
Potencjometry te mogą być używane do różnych celów - na przykład do nastawiania wartości
zadanej w timerach i licznikach, bez konieczności posiadania programatora podłączonego do
sterownika.
4 – 10
MITSUBISHI ELECTRIC
Rejestry
Szczegółowy opis urządzeń
Urządzenie
Rodzaje rejestrów danych
Normalne
Podtrzymywane
Identyfikator urządzenia
D
Typ urządzenia (do ustawiania
i wybierania)
Urządzenie typu słowo (w celu utworzenia słowa o podwójnej długości
można połączyć dwa rejestry)
Dopuszczalne wartości urządzenia
Rejestry 16 bitowe: 0000H do FFFFH (-32768 do 32767)
Rejestry 32 bitowe: 00000000H do FFFFFFFFH (-2 147 483 648 do
2 147 483 647)
Format adresu urządzenia
Dziesiętny
Liczba urządzeń i adresy
FX1S
128 (D0–D127)
128 (D128–D255)
FX1N
128 (D0–D127)
7872 (D128–D7999)
FX2N
FX2NC
200 (D0–D199)1
312 (D200–D511)2
7488 (D512–D7999)
FX3U
200 (D0–D199)1
524 (M500–M1023)2
6656 (M1024–M7679)
Rejestr
specjalny
Funkcja
Opcje działania programu
D8004
Adres przekaźnika błędu (pokazuje, które przekaźniki błędu są
ustawione)
Odczyt zawartości rejestru
D8005
Napięcie baterii (np. wartość „36” oznacza 3,6V)
D8010
Czas bieżącego cyklu programu
D8013–D8019
Czas i data wbudowanego zegara czasu rzeczywistego
Odczyt zawartości rejestru
zmiana zawartości rejestru
D8030
Odczyt wartości z potencjometru VR1 (0 – 255)
Odczyt zawartości rejestru
(tylko FX1S i FX1N)
D8031
Odczyt wartości z potencjometru VR2 (0 – 255)
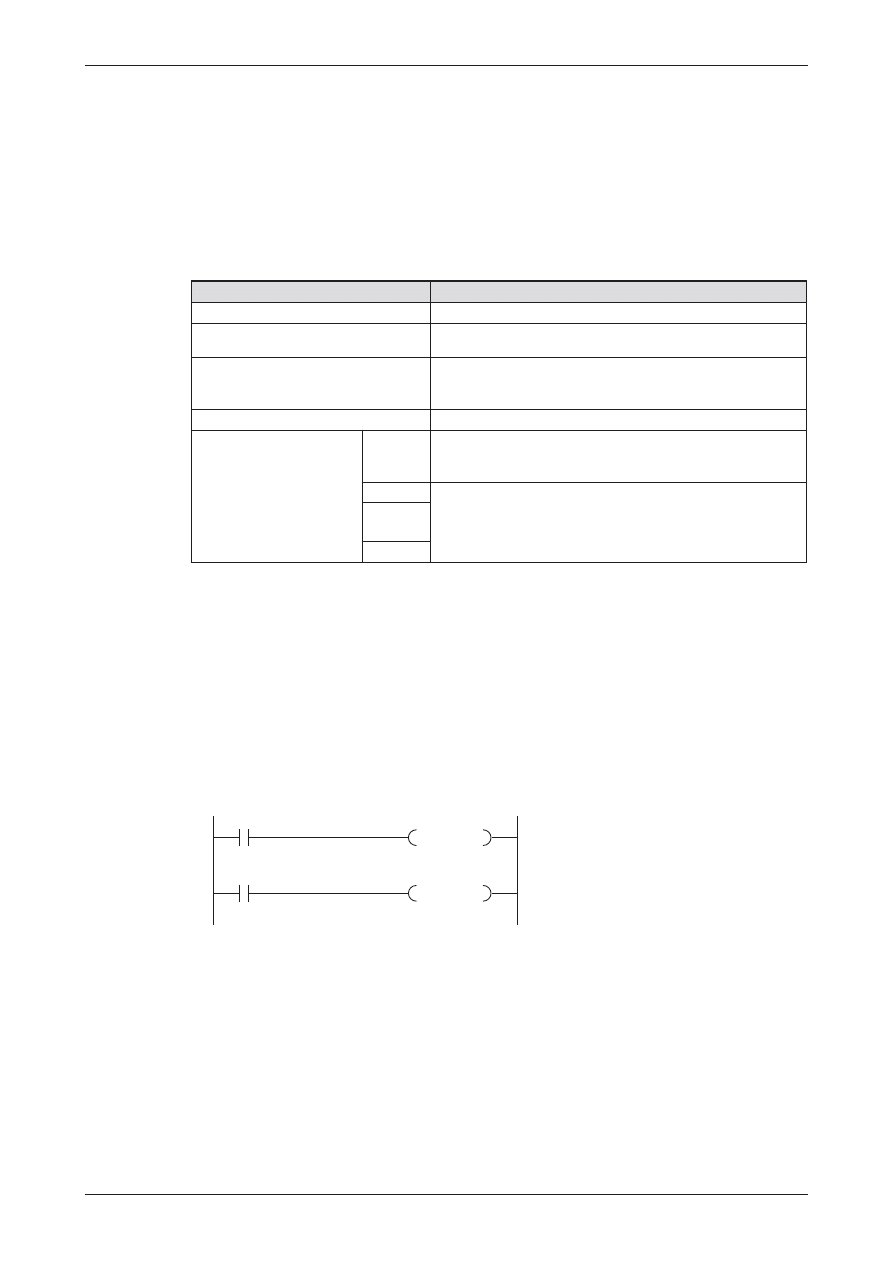
4.5.3
Rejestry zbioru
Zawartość rejestrów zbioru również nie zostanie utracona, gdy zasilanie zostanie wyłączone. W ten
sposób rejestry zbioru mogą być używane do przechowywania wartości, które podczas załączania
PLC mają być przeniesione do rejestrów danych. Jest to po to, żeby dane te mogły być użyte przez
program do obliczeń, porównań lub jako wartość zadana dla np. timerów.
Rejestry zbioru mają taką samą strukturę jak rejestry danych. Faktycznie są one rejestrami danych -
w zakresie od D1000 do D7999 tworzą bloki po 500 adresów każdy.
Po szczegółowy opis rejestrów zbioru, odsyłamy do Podręcznika Programowania rodziny MELSEC FX.
4.6
Porady programowe do timerów i liczników
4.6.1
Pośrednie określanie wartości zadanej dla timerów i liczników
Typowym sposobem określania wartości zadanej timerów i liczników jest bezpośrednio w
instrukcji wyjścia:
W powyższym przykładzie T31 jest timerem o podstawie 100 ms. Stała K500 ustawia opóźnienie na
500 x 0,1 sek. = 50 sek. Wartość zadana licznika C0 jest również ustawiana bezpośrednio na wartość
34, za pomocą stałej K34.
Przewagą takiego ustawiania wartości zadanej jest to, że nie trzeba zajmować się wartością
nastawy; wprowadza się tylko raz. Wartości używane w programie są zawsze ważne, nawet po awarii
zasilania i bezpośrednio po załączeniu sterownika. Jest to jednak również wadą: jeśli zachodzi
konieczność zmiany ustawienia, trzeba edytować program. Ma to szczególne zastosowanie dla
wartości nastaw timerów, które w czasie konfiguracji sterownika i testowania programu są często
dobierane.
Podręcznik dla początkujących
4 – 11
Szczegółowy opis urządzeń
Porady programowe do timerów i liczników
Urządzenie
Rejestry zbioru
Identyfikator urządzenia
D
Typ urządzenia (do ustawiania i wybierania)
Urządzenie typu słowo (w celu utworzenia słowa o podwójnej długości
można połączyć dwa rejestry)
Dopuszczalne wartości urządzenia
Rejestr 16 bitowy: 0000H do FFFFH (-32768 do 32767)
Rejestr 32 bitowy: 00000000H do FFFFFFFFH (-2 147 483 648 do
2 147 483 647)
Format adresu urządzenia
Dziesiętny
Liczba urządzeń i adresy
FX1S
1500 (D1000–D2499)
W parametrach PLC można zdefiniować maksymalnie 3 bloki po 500
rejestrów każdy.
FX1N
7000 (D1000–D7999)
W parametrach PLC można zdefiniować maksymalnie 14 bloków po 500
rejestrów każdy.
FX2N
FX2NC
FX3U
X17
T31
K500
M50
C0
K34
0
4
Lista instrukcji
0
LD
X17
1
OUT
T31
K500
4
LD
M50
5
OUT
C0
K34
Schemat drabinkowy
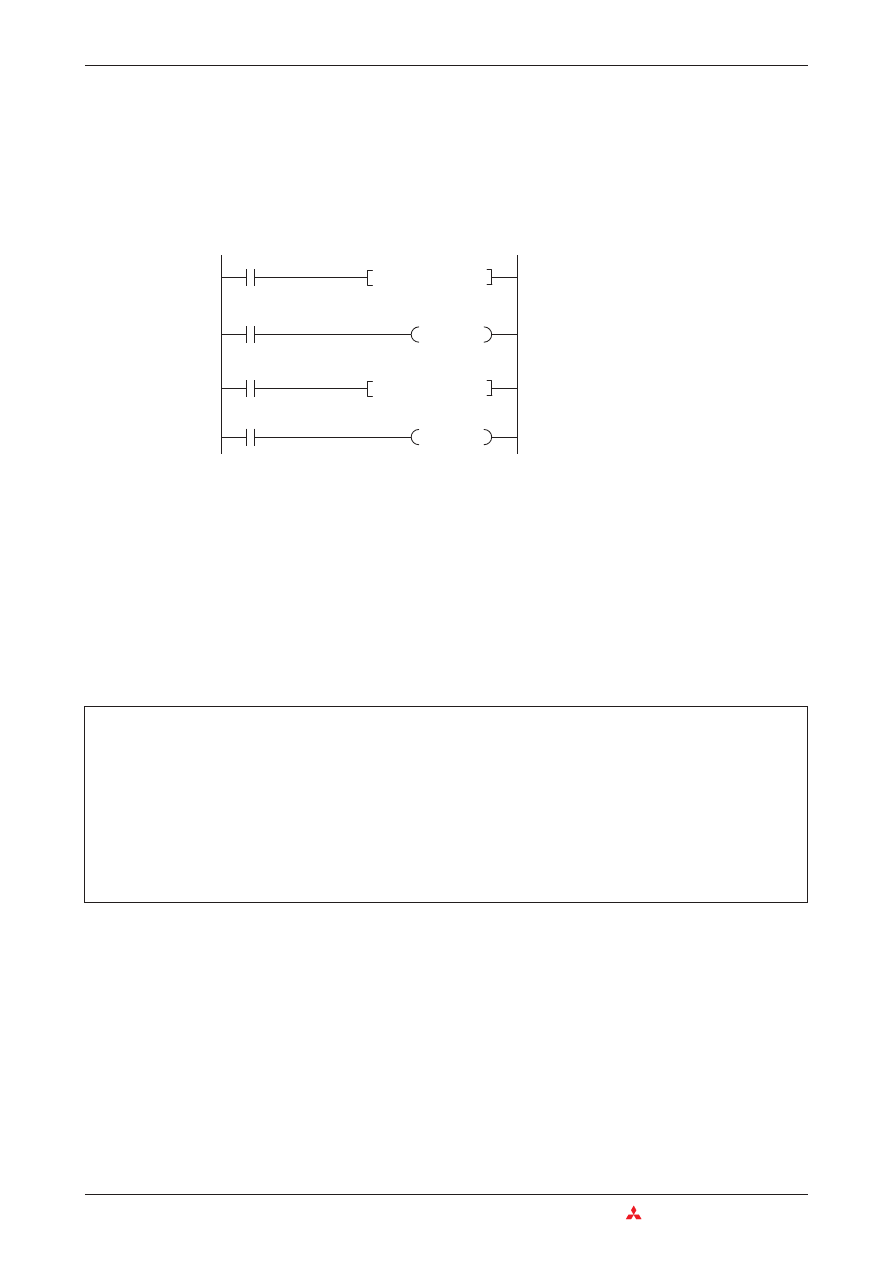
Wartości nastaw dla timerów i liczników można również przechowywać w rejestrach danych i
odczytywać je programowo z tych rejestrów. Jeśli to konieczne możliwa jest również szybka
zmiana wartości z programatora lub określenie wartości zadanej za pomocą przełączników
umieszczonych w konsoli sterującej, lub z panelu sterującego HMI.
Następująca lista pokazuje przykład, w jaki sposób pośrednio określać wartości zadane:
–
Gdy przekaźnik M15 jest w stanie "1", zawartości rejestru danych D100 kopiowane są do D131.
Rejestr ten zawiera wartość zadaną dla T131. W celu dobrania zawartości D100 można użyć
oprogramowania lub jednostki sterującej.
–
Specjalny przekaźnik M8002 ustawiany jest bezpośrednio po załączeniu PLC, tylko na czas poje-
dynczego cyklu programu. Został użyty do skopiowania wartości stałej 34 do rejestru danych
D5, który następnie używany jest jako wartość zadana dla licznika C0.
Nie jest konieczne używanie instrukcji programu, w celu skopiowania wartości zadanej do rejes-
trów danych. Na przykład, przed uruchomieniem programu, do ustawienia tych wartości można
również użyć jednostkę programującą.
E
OSTRZEŻENIE:
Jeśli używany jest normalny rejestr, wartość zadana zostanie utracona, gdy napięcie zasilania
zostanie wyłączone i gdy przełącznik RUN/STOP zostanie ustawiony na pozycji STOP. Jeśli to się
stanie, przy następnym załączeniu zasilania i/lub przy ponownym uruchomieniu PLC, mogą
powstać niebezpieczne warunki, ponieważ wszystkie nastawy będą miały wartość „0”.
Jeśli nie skonfigurowano programu do automatycznego kopiowania wartości nastaw, do
przechowywania wartości zadanych dla timerów i liczników, należy zawsze używać
zatrzaskowych rejestrów danych. Należy również pamiętać, że jeśli bateria podtrzymująca jest
rozładowana, po wyłączeniu PLC zawartość tych rejestrów również zostanie utracona.
4 – 12
MITSUBISHI ELECTRIC
Porady programowe do timerów i liczników
Szczegółowy opis urządzeń
X17
T31
D131
M8002
MOV D100 D131
M15
M50
C0
D5
MOV K34 D5
0
6
10
16
Lista instrukcji
0
LD
M15
1
MOV
D100
D131
6
LD
X17
7
OUT
T31
D131
10 LD
M8002
11 MOV
K34
D5
16 LD
M50
17 OUT
C0
D5
Schemat drabinkowy
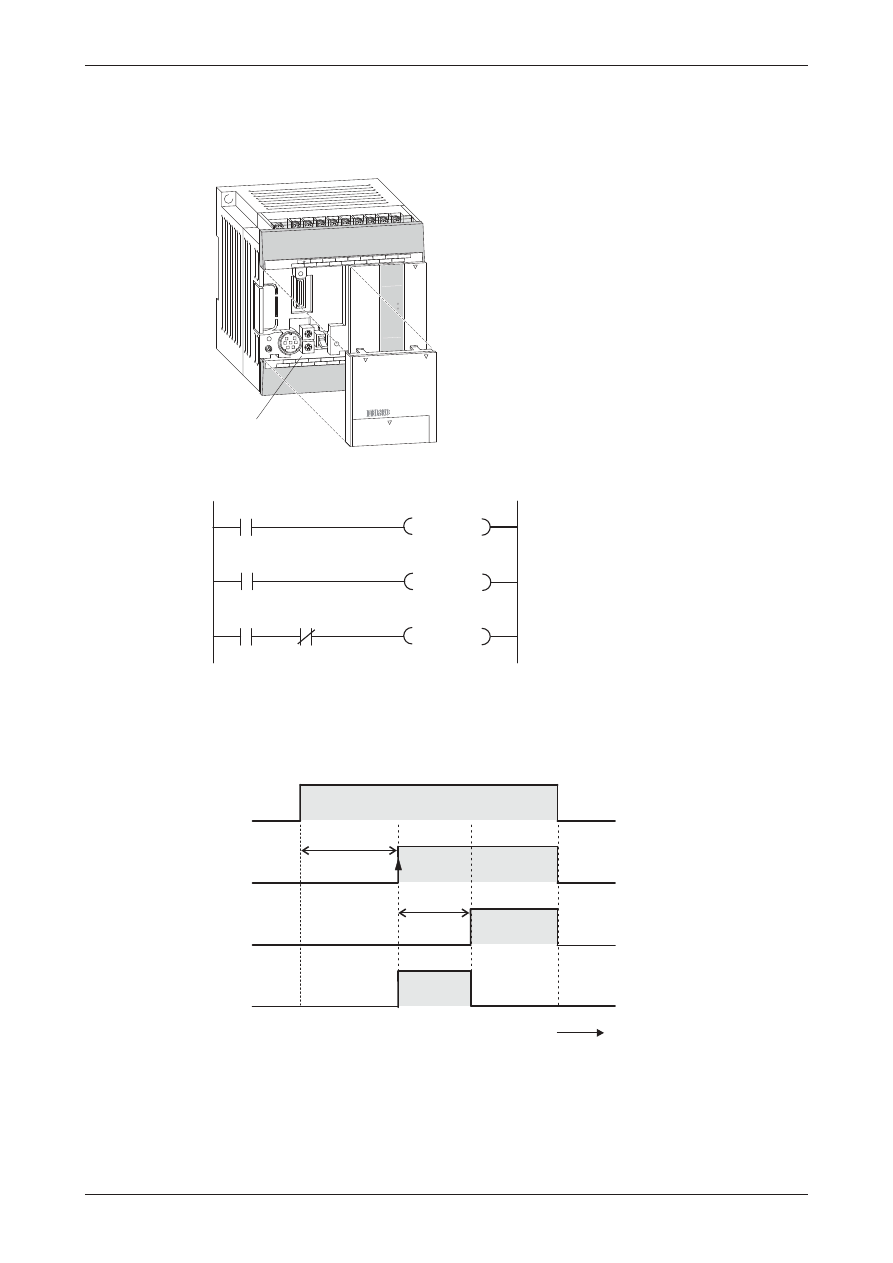
Ustawianie wartości zadanej przy pomocy wbudowanych potencjometrów
Sterowniki z serii FX1S i FX1N mają wbudowane dwa potencjometry analogowe, za pomocą których
można łatwo i szybko ustawić wartość zadaną dla timerów i innych funkcji.
W powyższym przykładzie programu, po czasie opóźnienia określonym przez timer
T1
załączane
jest Y0 na czas określony przez timer T2 (generator impulsów opóźnionych).
Podręcznik dla początkujących
4 – 13
Szczegółowy opis urządzeń
Porady programowe do timerów i liczników
0 1 2 3
4 5 6 7
8 9 10 11
12 13 14 15
0 1 2 3
4 5 6 7
10 11
IN
OUT
POWER
FX -24MR
1N
RUN
ERROR
100-240
VAC
X7
X11 X13
X15
X5
X3
X1
S/S
X6
X10
X12
X14
X4
X2
X0
N
L
24MR
-ES/UL
Y10
Y6
Y5
Y3
COM3
Y4
COM4
Y7
Y11
COM2
COM1
COM0
24+
Y2
Y1
Y0
0V
MITSUBISHI
Wartość górnego potencjometru (VR1), może zostać
odczytana ze specjalnego rejestru danych D8030,
natomiast wartość dolnego potencjometru (VR2) z
rejestru danych D8031. Używając jednego z
potencjometrów jako źródła wartości zadanej dla
timera, należy w programie wyspecyfikować odpo-
wiedni rejestr zamiast stałej.
Kręcąc potencjometrem można dobierać wartości w
rejestrze pomiędzy 0 i 255.
Potencjometr
T1
T2
Y000
T2
T1
X001
T1
D8030
D8031
0
4
8
Schemat drabinkowy
Lista instrukcji
0
LD
X001
1
OUT
T1
D8030
4
LD
T1
5
OUT
T2
D8031
8
LD
T1
8
ANI
T2
10 OUT
Y000
T2
T1
Y0
X1
[D8030]
t
OFF
ON
OFF
ON
0
1
0
1
[D8031]
Kolejność sygnałów
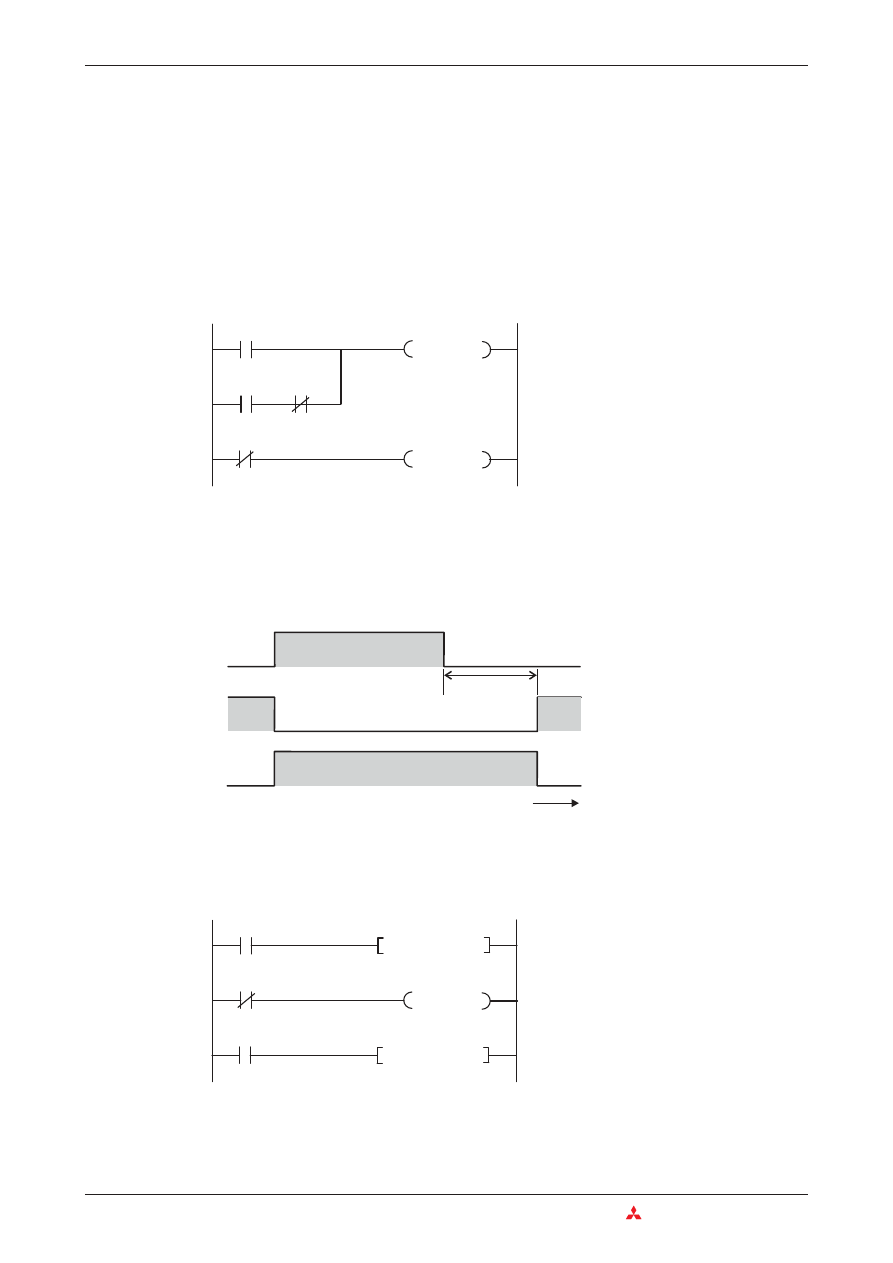
4.6.2
Opóźnienie wyłączenia
Wszystkie timery w sterownikach MELSEC są z zasady timerami z opóźnionym załączeniem, tzn. po
zdefiniowanym okresie opóźnienia wyjście zostaje załączone. Jednak często zachodzi potrzeba
zaprogramowania operacji opóźnionego wyłączenia (wyłączenie po opóźnieniu). Typowym tego
przykładem jest wentylator w łazience, który kontynuuje pracę przez kilka minut po wyłączeniu
światła.
Pierwsza wersja programu (zatrzaskiwanie)
Tak długo, jak długo wejście X1 (np. wyłącznik światła) jest załączony, wyjście Y0 (wentylator) jest rów-
nież załączone. Jednak funkcja zatrzasku zapewnia, że po wyłączeniu X1, Y0 również pozostanie
włączone, ponieważ timer T0 pracuje w dalszym ciągu. T0 uruchamiany jest po wyłączeniu X1. Na końcu
czasu opóźnienia (w tym przykładzie 300 x 0,1sek. = 30 sek.) T0 przerywa zatrzask Y0 i wyłącza wyjście.
Druga wersja programu (set/reset)
Gdy X1 zostanie włączony, wyjście Y0 jest ustawione (załączone). T0 uruchamiany jest po wyłącze-
niu X1. Następnie, po okresie opóźnienia T0 kasuje wyjście Y0. Kolejność sygnałów wynikowych jest
identyczna z wygenerowanymi przez pierwszą wersję programu.
4 – 14
MITSUBISHI ELECTRIC
Porady programowe do timerów i liczników
Szczegółowy opis urządzeń
Y000
X001
X001
Y000
T0
T0
K300
0
5
Schemat drabinkowy
Lista instrukcji
0
LD
X001
1
LD
Y000
2
ANI
T0
3
ORB
4
OUT
Y000
5
LDI
X001
6
OUT
T0
K300
Y0
X1
T0
30 s
t
Kolejność sygnałów
X001
T0
RST
Y000
X001
SET
Y000
T0
K300
0
6
2
Schemat drabinkowy
Lista instrukcji
0
LD
X001
1
SET
Y000
2
LDI
X001
3
OUT
T0
K300
6
LD
T0
7
RST
Y000
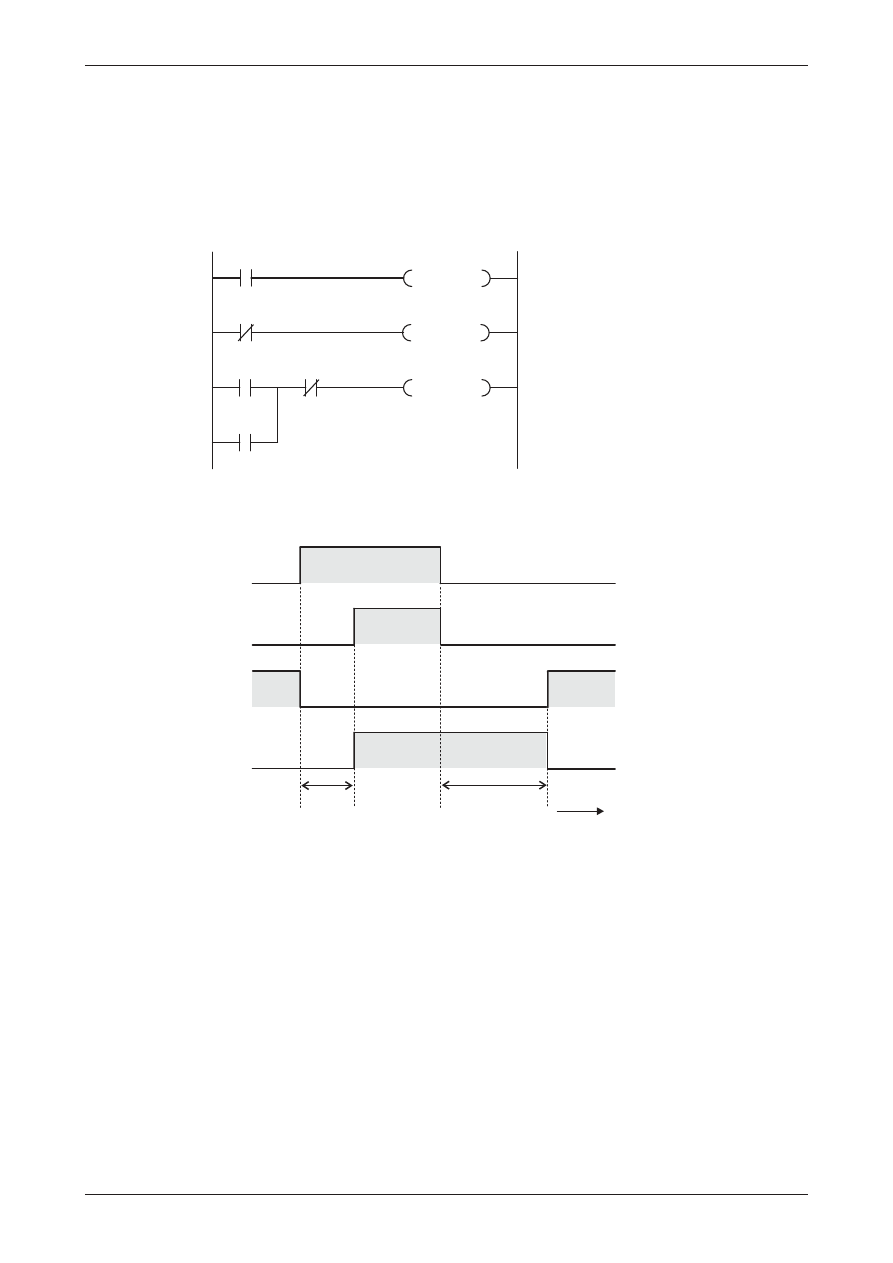
4.6.3
Opóźnione załączenie i rozłączenie
Czasami potrzebne jest załączenie wyjścia po opóźnieniu, a następnie ponowne wyłączenie po
kolejnym opóźnieniu. Jest to bardzo łatwe do zrealizowania z zastosowaniem podstawowych
instrukcji logicznych sterownika.
Z pomocą T1 wyjście Y000 zostaje zatrzaśnięte podtrzymując załączone wyjście aż do końca okresu
opóźnienia wyłączenia.
Podręcznik dla początkujących
4 – 15
Szczegółowy opis urządzeń
Porady programowe do timerów i liczników
T1
X000
Y000
X000
T2
T1
T2
Y000
K25
K50
0
8
4
Schemat drabinkowy
Lista instrukcji
0
LD
X000
1
OUT
T1
K25
4
LDI
X000
5
OUT
T2
K50
8
LD
T1
9
OR
Y000
10 ANI
T2
11 OUT
Y000
T2
T1
Y0
X0
t1
t
OFF
ON
OFF
ON
0
1
0
1
t2
Kolejność sygnałów
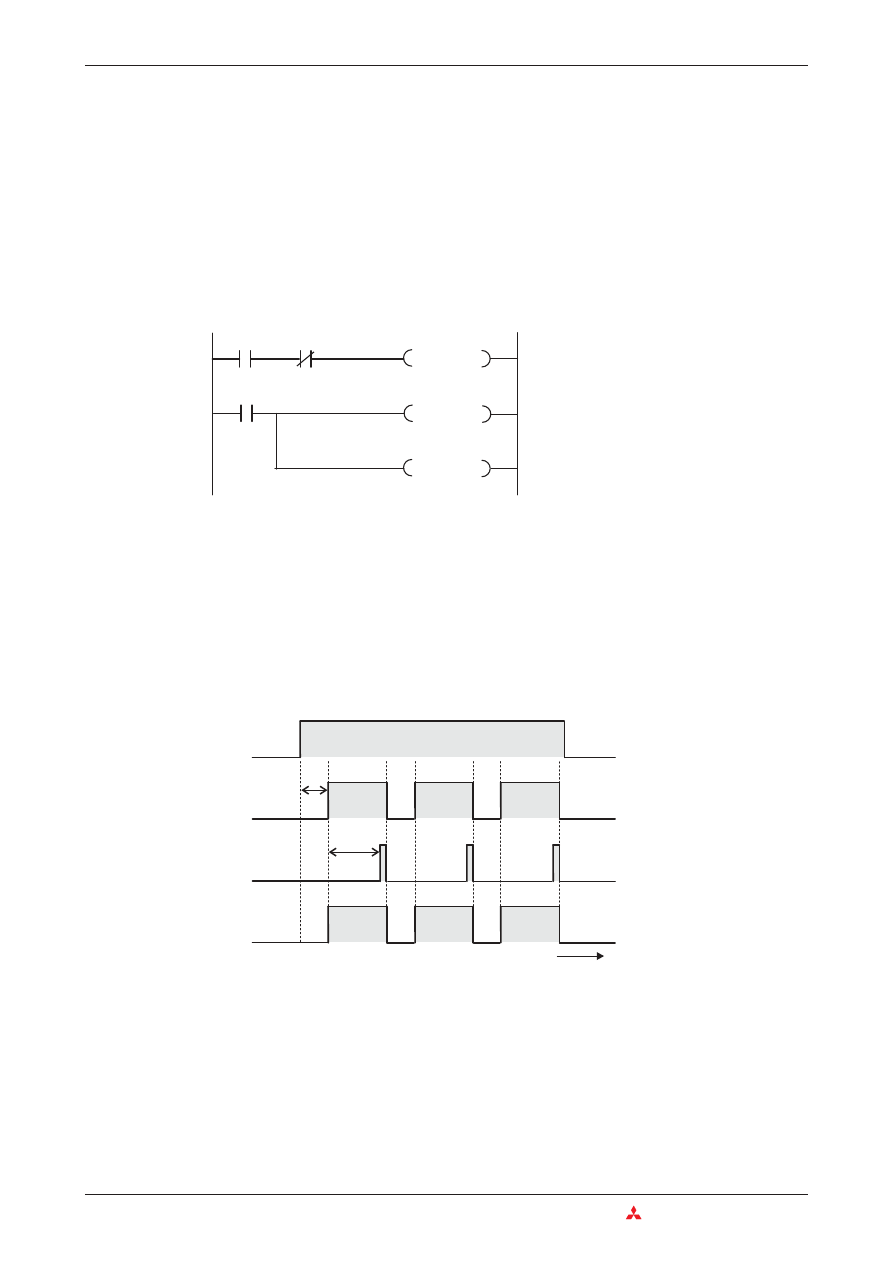
4.6.4
Generatory sygnałów zegarowych
Sterowniki mają specjalne przekaźniki, które ułatwiają programowanie zadań wymagających
regularnych sygnałów zegarowych (na przykład do sterowania migającym światłem pokazującym
błąd). Na przykład, przekaźnik M8013 przełącza się regularnie na ON i OFF w 1-sekundowych
odstępach czasu. Pełna informacja związana ze specjalnymi przekaźnikami, znajduje się Podręcz-
niku Programowania rodziny FX.
Jeśli potrzebne są różne częstotliwości zegara lub różne czasy załączania i wyłączania, za pomocą
dwóch timerów można zaprogramować swój własny generator sygnałów zegarowych, jak ten:
Wejście X1 uruchamia generator zegarowy. Jeśli trzeba, można pominąć to wejście - wtedy generator
zegarowy pracuje cały czas. W programie można użyć wyjście T1 do sterowania migającego światła
ostrzegawczego. Okres trwania stanu ON określony jest przez T2, natomiast stan OFF przez T1.
Wyjście timera T2 załączane jest tylko na czas trwania pojedynczego cyklu programu. Na poniższej
ilustracji sekwencji sygnałów, czas ten pokazany został jako o wiele dłuższy niż jest w rzeczywistości.
T2 wyłącza T1 i natychmiast po tym T2 również wyłącza samego siebie. Wskutek tego czas trwania
załączenia jest zwiększony o czas, który potrzebny jest do wykonania cyklu programu. Ponieważ
jednak ten cykl trwa tylko kilka milisekund, zwykle może być pominięty.
4 – 16
MITSUBISHI ELECTRIC
Porady programowe do timerów i liczników
Szczegółowy opis urządzeń
T1
T2
Y000
T2
X001
T1
K10
K20
0
5
Schemat drabinkowy
Lista instrukcji
0
LD
X001
1
ANI
T2
2
OUT
T1
K10
5
LD
T1
6
OUT
T2
K20
9
OUT
Y000
T2
T1
Y1
X0
t1
t
OFF
ON
OFF
ON
0
1
0
1
t2
Kolejność sygnałów
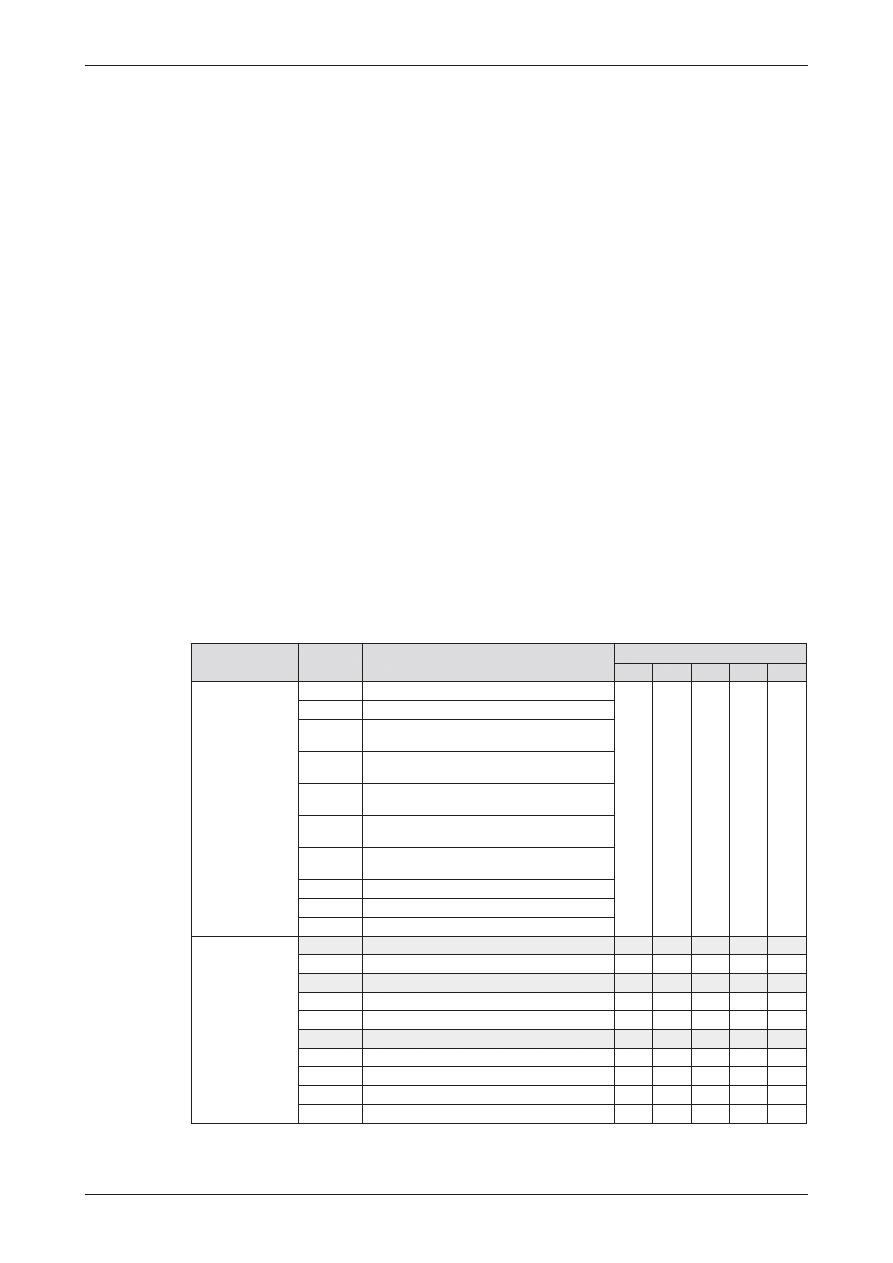
5
Programowanie zaawansowane
Podstawowe instrukcje logiczne opisane w rozdziale 3 mogą być użyte w sterownikach PLC do naś-
ladowania funkcji sterowników wykonanych w technice przekaźnikowej. Jednak w przypadku
nowoczesnych sterowników PLC dotykają tylko istoty problemu. Ponieważ każdy PLC zbudowany
jest w oparciu o miroprocesor, może łatwo wykonywać takie operacje, jak obliczenia matematy-
czne, porównywanie liczb, przekształcanie z jednego systemu liczbowego na inny lub może prze-
twarzać wartości analogowe.
Funkcje takie jak te, które wychodzą poza możliwości operacji logicznych, wykonywane są przez
specjalne instrukcje, które nazywane są stosowanymi lub instrukcjami użytkowym.
5.1
Instrukcje użytkowe
Instrukcje użytkowe mają krótkie nazwy, które oparte są na angielskich nazwach ich funkcji. Na
przykład, instrukcja porównująca dwie 16-bitowe lub 32-bitowe liczby nazywana jest CMP, co jest
skrótem od compare.
Podczas programowania instrukcji użytkowej wprowadzana jest nazwa instrukcji, która poprzedza
nazwę urządzenia. Następna tabela pokazuje wszystkie instrukcje użytkowe aktualnie wykorzyst-
ywane przez rodzinę sterowników MELSEC FX. W pierwszej chwili lista ta może wyglądać trochę
przytłaczająco, lecz nie należy obawiać się - nie trzeba uczyć się jej całej na pamięć! Celem odszuk-
ania potrzebnej instrukcji, podczas programowania w GX Developer i GX IEC Developer można
skorzystać z użytecznej funkcji Pomocy.
W tym rozdziale omówimy tylko częściej używane instrukcje, które pokazane zostały w tabeli na sza-
rym tle. Pełna dokumentacja do wszystkich instrukcji znajduje się w Podręczniku Programowania
do rodziny MELSEC FX.
Podręcznik dla początkujących
5 – 1
Programowanie zaawansowane
Instrukcje użytkowe
Kategoria
Instrukcja
Funkcja
Sterownik
FX
1S
FX
1N
FX
2N
FX
2NC
FX
3U
Funkcje przeplywu
programu
CJ
Skok warunkowy do miejsca w programie
쏹
쏹
쏹
쏹
쏹
CALL
Wywoluje (wykonuje) podprogram
SRET
Subroutine Return, wyznacza koniec podprog-
ramu
IRET
Interrupt Return, wyznacza koniec podprogramu
obsługi przerwania
EI
Enable Interrupt, umożliwia przetwarzanie
programu obsługi przerwania
DI
Disable Interrupt, blokuje przetwarzanie
programu obsługi przerwania
FEND
First End, wyznacza koniec bloku glównego
programu
WDT
Odswieża licznik czasu watchdog’a
FOR
Wyznacza początek pętli programowej
NEXT
Wyznacza koniec petli programowej
Funkcje przenies-
ienia
i porównania
CMP
Porównanie wartości cyfrowych
쏹
쏹
쏹
쏹
쏹
ZCP
Zone Compare, porównanie cyfrowe zakresów
쏹
쏹
쏹
쏹
쏹
MOV
Przeniesienie danej z jednego miejsca do innego
쏹
쏹
쏹
쏹
쏹
SMOV
Przesunięcie i przeniesienie
쏹
쏹
쏹
CML
Uzupełnia, kopiuje i odwraca
쏹
쏹
쏹
BMOV
Przenosi blok danych
쏹
쏹
쏹
쏹
쏹
FMOV
Fill Move, kopiuje do szeregu urządzeń
쏹
쏹
쏹
XCH
Zamienia dane w wyznaczonych urządzeniach
쏹
쏹
쏹
BCD
Przekształca BCD
쏹
쏹
쏹
쏹
쏹
BIN
Przekształca dwójkowe
쏹
쏹
쏹
쏹
쏹
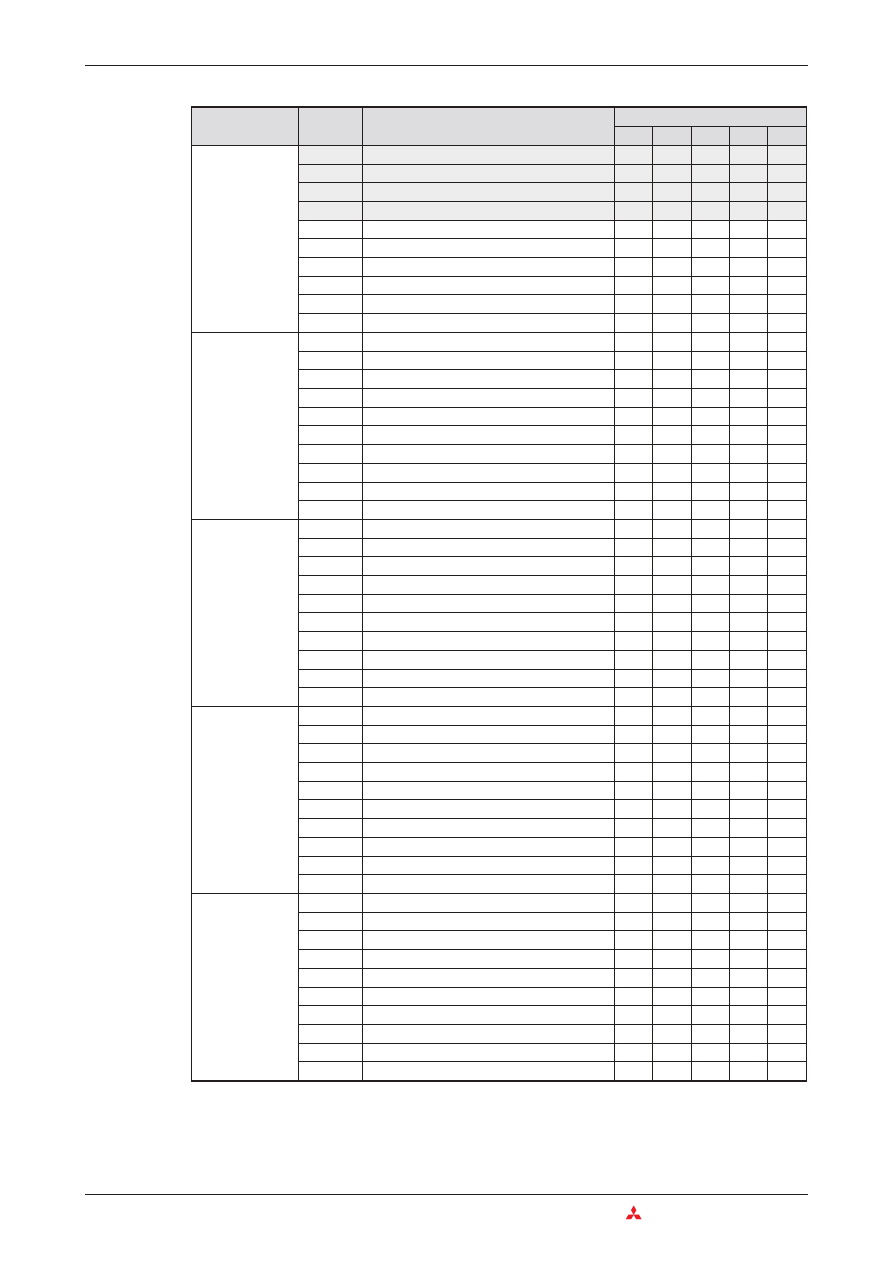
5 – 2
MITSUBISHI ELECTRIC
Instrukcje użytkowe
Programowanie zaawansowane
Kategoria
Instrukcja
Funkcja
Sterownik
FX
1S
FX
1N
FX
2N
FX
2NC
FX
3U
Instrukcje
matematyczne
i logiczne
ADD
Dodaje wartości cyfrowe
쏹
쏹
쏹
쏹
쏹
SUB
Odejmuje wartości dwójkowe
쏹
쏹
쏹
쏹
쏹
MUL
Mnoży wartości cyfrowe
쏹
쏹
쏹
쏹
쏹
DIV
Dzieli wartości cyfrowe
쏹
쏹
쏹
쏹
쏹
INC
Zwiększanie wartości
쏹
쏹
쏹
쏹
쏹
DEC
Zmniejszanie wartości
쏹
쏹
쏹
쏹
쏹
AND
AND logiczny
쏹
쏹
쏹
쏹
쏹
OR
OR logiczny
쏹
쏹
쏹
쏹
쏹
XOR
Logiczna suma wyłączna OR
쏹
쏹
쏹
쏹
쏹
NEG
Negacja, odwraca logiczny stan urządzenia
쏹
쏹
쏹
Funkcje obrotu
i przesunięcia
ROR
Obrót w prawo
쏹
쏹
쏹
ROL
Obrót w lewo
쏹
쏹
쏹
RCR
Obrót w prawo z przeniesieniem
쏹
쏹
쏹
RCL
Obrót w lewo z przeniesieniem
쏹
쏹
쏹
SFTR
Przesunięcie bitowe w prawo
쏹
쏹
쏹
쏹
쏹
SFTL
Przesunięcie bitowe w lewo
쏹
쏹
쏹
쏹
쏹
WSFR
Przesunięcie wartości słów w prawo
쏹
쏹
쏹
WSFL
Przesunięcie wartości słów w lewo
쏹
쏹
쏹
SFWR
Zapis i przesunięcie do stosu typu FIFO
쏹
쏹
쏹
쏹
쏹
SFRD
Odczyt i przesunięcie ze stosu typu FIFO
쏹
쏹
쏹
쏹
쏹
Funkcje operacji na
danych
ZRST
Zone Reset, zeruje obszar podobnych urządzeń
쏹
쏹
쏹
쏹
쏹
DECO
Dekodowanie danych
쏹
쏹
쏹
쏹
쏹
ENCO
Kodowanie danych
쏹
쏹
쏹
쏹
쏹
SUM
Suma (ilość) aktywnych bitów
쏹
쏹
쏹
BON
Sprawdza stan bitu
쏹
쏹
쏹
MEAN
Oblicza wartość średnią
쏹
쏹
쏹
ANS
Ustawia czasowy sygnalizator (nie)wykonania
쏹
쏹
쏹
ANR
Kasuje czasowy sygnalizator (nie)wykonania
쏹
쏹
쏹
SQR
Pierwiastek kwadratowy
쏹
쏹
쏹
FLT
Zmienny przecinek, przekształca dane
쏹
쏹
쏹
Instrukcje szybkie
REF
Odświeża wejścia i wyjścia
쏹
쏹
쏹
쏹
쏹
REFF
Odświeża wejścia i ustawia filtry
쏹
쏹
쏹
MTR
Odczyt matrycy wejściowej
쏹
쏹
쏹
DHSCS
Ustawianie licznikiem szybkim
쏹
쏹
쏹
쏹
쏹
DHSCR
Kasowanie licznikiem szybkim
쏹
쏹
쏹
쏹
쏹
DHSZ
Porównanie strefy z licznikiem szybkim
쏹
쏹
쏹
SPD
Pomiar prędkości licznikiem szybkim
쏹
쏹
쏹
쏹
쏹
PLSY
Generacja impulsów na wyjściu Y
쏹
쏹
쏹
쏹
쏹
PWM
Modulacja szerokości impulsów wyjściowych
쏹
쏹
쏹
쏹
쏹
PLSR
Generuje impulsy (przyspieszenie/zwalnianie)
쏹
쏹
쏹
쏹
쏹
Instrukcje
użytkowe
IST
Incjuje tryby wielofunkcyjnego systemu STL
쏹
쏹
쏹
쏹
쏹
SER
Przeszukuje stos danych
쏹
쏹
쏹
ABSD
Absolutny programator bębnowy
쏹
쏹
쏹
쏹
쏹
INCD
Przyrostowy programator bębnowy
쏹
쏹
쏹
쏹
쏹
TTMR
Licznik czasu ustawiany stanem wejścia
쏹
쏹
쏹
STMR
Specjalny licznik czasu
쏹
쏹
쏹
ALT
Odwraca stan urządzenia, flip-flop
쏹
쏹
쏹
쏹
쏹
RAMP
Ustala wartości pomiędzy granicami
쏹
쏹
쏹
쏹
쏹
ROTC
Sterowanie stołem obrotowym
쏹
쏹
쏹
SORT
Sortuje dane w tabelach
쏹
쏹
쏹
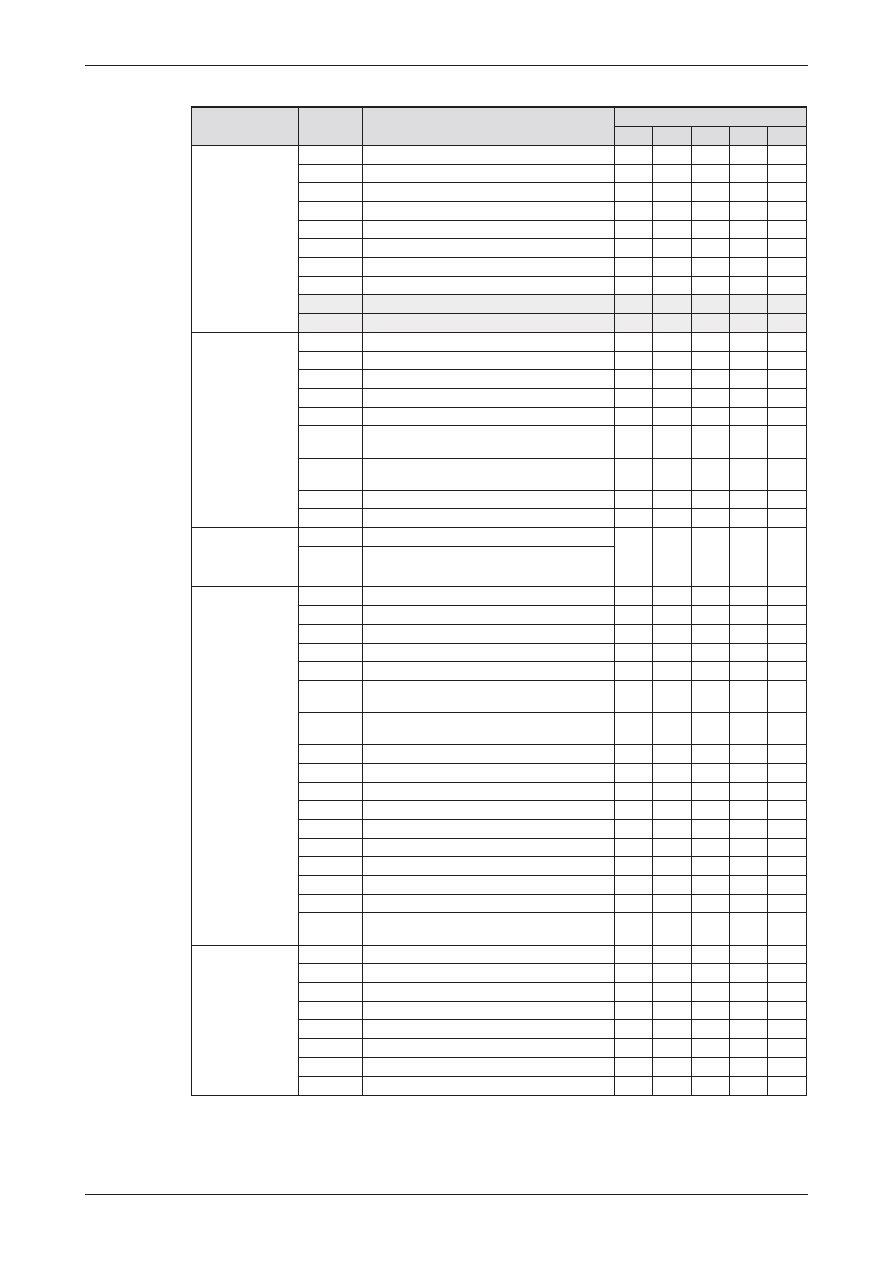
Podręcznik dla początkujących
5 – 3
Programowanie zaawansowane
Instrukcje użytkowe
Kategoria
Instrukcja
Funkcja
Sterownik
FX
1S
FX
1N
FX
2N
FX
2NC
FX
3U
Instrukcje do
zewnętrznych
urządzeń we/wy
TKY
Odczyt 10-ciu przycisków
쏹
쏹
쏹
HKY
Odczyt 16-tu przycisków
쏹
쏹
쏹
DSW
Zadajnik cyfrowy
쏹
쏹
쏹
쏹
쏹
SEGD
Dekoder wyświetlacza 7-segmentowego
쏹
쏹
쏹
SEGL
Dekoder 7-segmentowy z zatrzaskiem
쏹
쏹
쏹
쏹
쏹
ARWS
Sterowanie 4-klawiszowe (kursory)
쏹
쏹
쏹
ASC
Przetwarzanie ASCII
쏹
쏹
쏹
PR
Drukowanie w ASCII przez wyjścia
쏹
쏹
쏹
FROM
Odczyt ze specjalnego bloku funkcyjnego
쏹
쏹
쏹
쏹
TO
Zapis do specjalnego bloku funkcyjnego
쏹
쏹
쏹
쏹
Instrukcje do
zewnętrznych
urządzeń
szeregowych
RS
Szeregowa komunikacja przez RS
쏹
쏹
쏹
쏹
쏹
PRUN
Praca równoległa (tryb ósemkowy)
쏹
쏹
쏹
쏹
쏹
ASCI
Przekształca na znaki ASCII
쏹
쏹
쏹
쏹
쏹
HEX
Przekształca na znaki szesnastkowe
쏹
쏹
쏹
쏹
쏹
CCD
Kontrola parzystości i sumy
쏹
쏹
쏹
쏹
쏹
VRRD
Odczyt wartości nastaw z FX1N-8AV-BD
i FX2N-8AV-BD
쏹
쏹
쏹
쏹
쏹
VRSC
Odczyt nastawy przełącznika z FX1N-8AV-BD
i FX2N-8AV-BD
쏹
쏹
쏹
쏹
쏹
RS2
Szeregowa komunikacja przez RS (2)
쏹
PID
Programowanie pętli sterowania PID
쏹
쏹
쏹
쏹
쏹
Zapis /
przywrócenie
rejestrów
indeksowych
ZPUSH
Zapis grupy rejestrów indeksowych
쏹
ZPOP
Przywrócenie grupy rejestrów indeksowych
Operacje zmien-
noprzecinkowe
DECMP
Porównanie wartości zmiennoprzecinkowych
쏹
쏹
쏹
DEZCP
Zmiennoprzecinkowe porównanie stref
쏹
쏹
쏹
DEMOV
Przeniesienie wartości zmiennoprzecinkowych
쏹
DESTR
Konwersja zmiennego przecinka na ciąg znaków
쏹
DEVAL
Konwersja ciągu znaków na zmienny przecinek
쏹
DEBCD
Konwersja zmiennego przecinka na notację
naukową
쏹
쏹
쏹
DEBIN
Konwersja notacji naukowej na zmienny
przecinek
쏹
쏹
쏹
DEADD
Dodawanie liczb zmiennoprzecinkowych
쏹
쏹
쏹
DESUB
Odejmowanie liczb zmiennoprzecinkowych
쏹
쏹
쏹
DEMUL
Mnożenie liczb zmiennoprzecinkowych
쏹
쏹
쏹
DEDIV
Dzielenie liczb zmiennoprzecinkowych
쏹
쏹
쏹
DEXP
Eksponenta zmiennoprzecinkowa
쏹
DLOGE
Obliczanie logarytmu naturalnego
쏹
DLOG10
Obliczanie logarytmu dziesiętnego
쏹
DESQR
Zmiennoprzecinkowy pierwiastek kwadratowy
쏹
쏹
쏹
DENEG
Odwracanie znaku liczb zmiennoprzecinkowych
쏹
INT
Przekształcanie liczb zmiennoprzecinkowych na
całkowite
쏹
쏹
쏹
Instrukcje trygon-
ometryczne dla
liczb zmiennop-
rzecinkowych
SIN
Obliczanie funkcji sinus
쏹
쏹
쏹
COS
Obliczanie funkcji cosinus
쏹
쏹
쏹
TAN
Obliczanie funkcji tangens
쏹
쏹
쏹
ASIN
Obliczanie funkcji arcus sinus
쏹
ACOS
Obliczanie funkcji arcus cosinus
쏹
ATAN
Obliczanie funkcji arcus tangens
쏹
RAD
Przekształcanie stopni na radiany
쏹
DEG
Przekształcanie radianów na stopnie
쏹
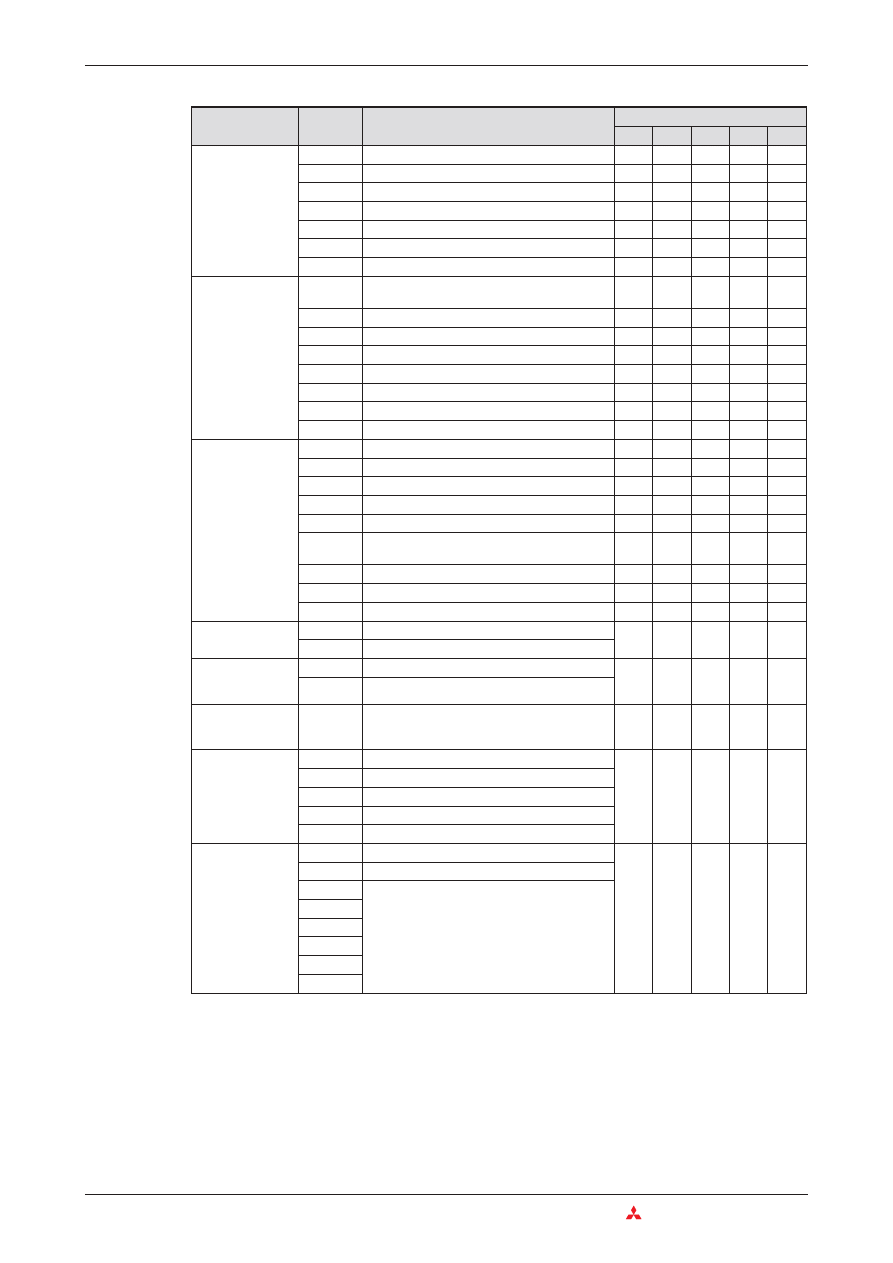
5 – 4
MITSUBISHI ELECTRIC
Instrukcje użytkowe
Programowanie zaawansowane
Kategoria
Instrukcja
Funkcja
Sterownik
FX
1S
FX
1N
FX
2N
FX
2NC
FX
3U
Operacje na
danych
WSUM
Obliczanie sumy kolejnych słów
쏹
WTOB
Dzieli słowa na bajty
쏹
BTOW
Składa słowa z bajtów
쏹
UNI
Łączy 4-bitowe grupy w słowa
쏹
DIS
Dzieli słowa na grupy 4-bitowe
쏹
SWAP
Zamienia miejscami bajty w słowie
쏹
쏹
쏹
SORT
Sortuje i grupuje dane w tabeli
쏹
Instrukcje do
pozycjonowania
DSZR
Powrót do pozycji zerowej
(przez czujnik zbliżeniowy)
쏹
DVIT
Przerwanie pozycjonowania
쏹
TBL
Tryb pozycjonowania wsadowego
쏹
DABS
Odczyt bieżącej pozycji bezwzględnej
쏹
쏹
쏹
쏹
쏹
ZRN
Powrót do punktu zerowego
쏹
쏹
쏹
PLSV
Generacja impulsów o zmiennej prędkości
쏹
쏹
쏹
DRVI
Pozycjonowanie inkrementalne
쏹
쏹
쏹
DRVA
Pozycjonowanie absolutne
쏹
쏹
쏹
Działania z
wbudowanym
zegarem czasu
rzeczywistego
TCMP
Porównuje daną zegara RTC
쏹
쏹
쏹
쏹
쏹
TZCP
Porównuje daną zegara RTC ze strefą
쏹
쏹
쏹
쏹
쏹
TADD
Dodaje daną zegara RTC
쏹
쏹
쏹
쏹
쏹
TSUB
Odejmuje daną zegara RTC
쏹
쏹
쏹
쏹
쏹
HTOS
Przekształca wartość czasu RTC na sekundy
쏹
STOH
Przekształca wartość sekund na format czasu
godz/min/sek
쏹
TRD
Odczyt danej czasu i daty
쏹
쏹
쏹
쏹
쏹
TWR
Zapis czasu i daty do zegara PLC
쏹
쏹
쏹
쏹
쏹
HOUR
Uruchamia działanie licznika godzin
쏹
쏹
쏹
쏹
쏹
Przekształcanie
kodu Gray'a
GRY
Przekształcenie kody Gray'a na postać dziesiętną
쏹
쏹
쏹
GBIN
Przekształcenie postaci dziesiętnej na kod Gray'a
Wymiana danych z
modułami
analogowymi
RD3A
Odczyt wejściowych wartości analogowych
쏹
쏹
쏹
쏹
WR3A
Zapis wyjściowych wartości analogowych
Instrukcje w
zewnętrznej
pamięci
EXTR
Wykonanie poleceń zapisanych w zewnętrznej
pamięci ROM
쏹
쏹
Różne instrukcje
COMRD
Odczyt komentarza
쏹
RND
Generacja liczb losowych
DUTY
Generacja impulsów o określonej długości
CRC
Obliczanie wartości CRC
HCMOV
Przenosi wartość bieżącą licznika szybkiego
Instrukcje do
danych przechow-
ywanych w kolejn-
ych urządzeniach
(bloki danych)
BK+
Dodaje dane w bloku danych
쏹
BK-
Odejmuje dane w bloku danych
BKCMP=
Porównuje dane w bloku danych
BKCMP>
BKCMP<
BKCMP<>
BKCMP<=
BKCMP>=
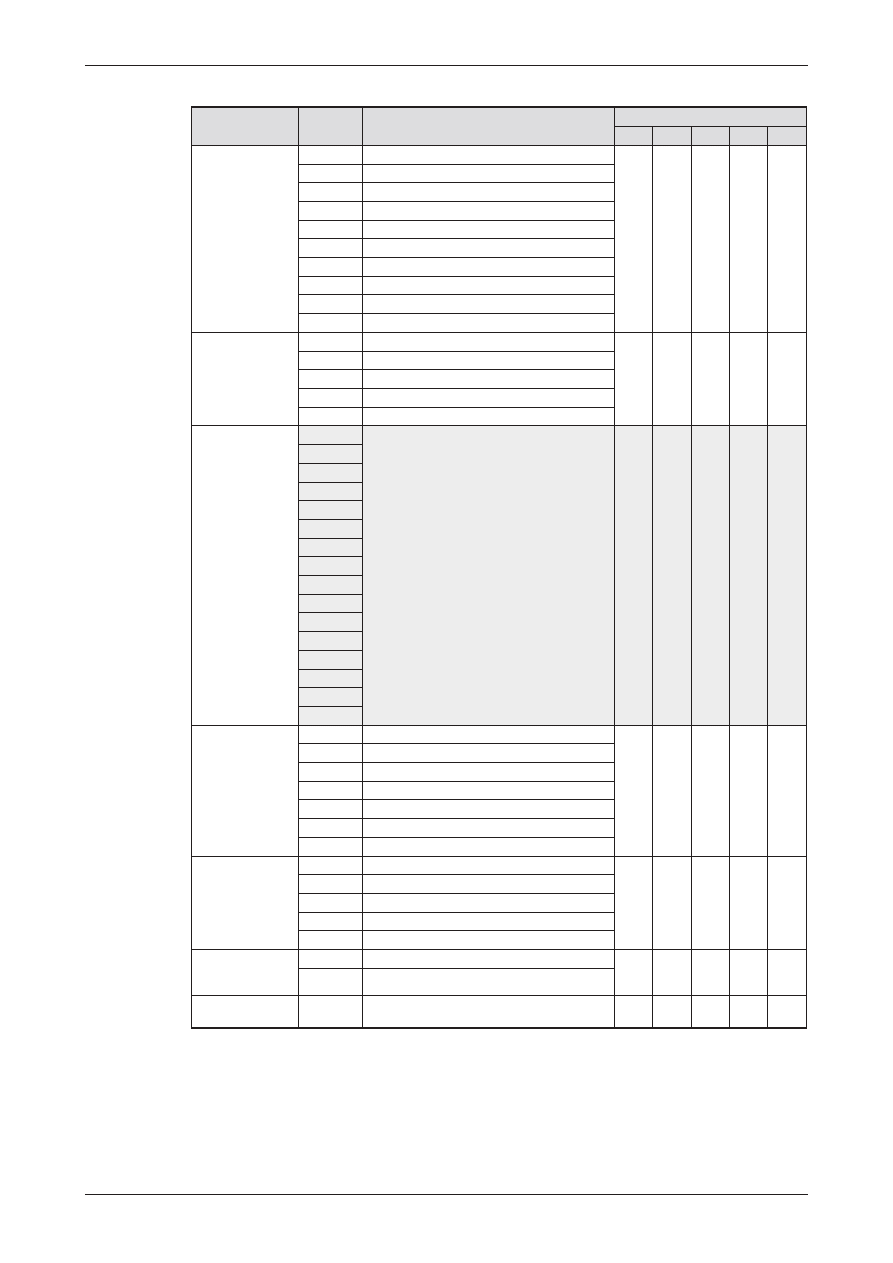
Podręcznik dla początkujących
5 – 5
Programowanie zaawansowane
Instrukcje użytkowe
Kategoria
Instrukcja
Funkcja
Sterownik
FX
1S
FX
1N
FX
2N
FX
2NC
FX
3U
Operacje na
ciągach
STR
Przekształca dane dwójkowa na ciąg
쏹
VAL
Przekształca ciąg na dane dwójkowe
$+
Łączy ciągi
LEN
Wykrywa (zwraca) długość ciągu
RIGHT
Wydobywa ciąg z prawej strony
LEFT
Wydobywa ciąg z lewej strony
MIDR
Wydobywa ciąg z dowolnej strony
MIDW
Usuwa ciąg z dowolnego miejsca
INSTR
Wyszukuje ciąg znaków
$MOV
Przenosi ciąg znaków
Działania na
tablicach danych
FDEL
Usuwa dane z tablicy
쏹
FINS
Wstawia dane do tablicy
POP
Czyta ostatnią daną wstawioną do tablicy
SFR
Przesuwa 16-bitową daną w prawo
SFL
Przesuwa 16-bitową daną w lewo
Operacje
porównania
LD=
Porównuje dane wewnątrz operacji
쏹
쏹
쏹
쏹
쏹
LD>
LD<
LD<>
LD<=
LD>=
AND=
AND>
AND<
AND>=
OR=
OR>
OR<
OR<>
OR<=
OR>=
Instrukcje sterujące
danymi
LIMIT
Ogranicza wartości zakresu wyjściowego
쏹
BAND
Definiuje przesunięcie wejściowe
ZONE
Definiuje przesunięcie wyjściowe
SCL
Skaluje wartości
DABIN
Przekształca liczby w ASCII na dwójkowe
BINDA
Przekształca wartości dwójkowe na kody ASCII
SCL2
Skaluje wartości (inna struktura tablicy niż SCL)
Instrukcje do
komunikacji z
przetwornicami
częstotliwości
IVCK
Sprawdza status przetwornicy
쏹
IVDR
Steruje przetwornicą częstotliwości
IVRD
Odczytuje parametr przetwornicy
IVWR
Zapisuje parametr do przetwornicy
IVBWR
Zapisuje blok parametrów do przetwornicy
Wymiana danych
ze specjelnymi blo-
kami funkcyjnymi
RBFM
Odczytuje z pamięci buforowej modułu
쏹
WBFM
Zapisuje do pamięci buforowej modułu
Instrukcja z licznik-
iem szybkim
HSCT
Porównuje bieżącą wartość licznika szybkiego z
danymi w tablicy
쏹
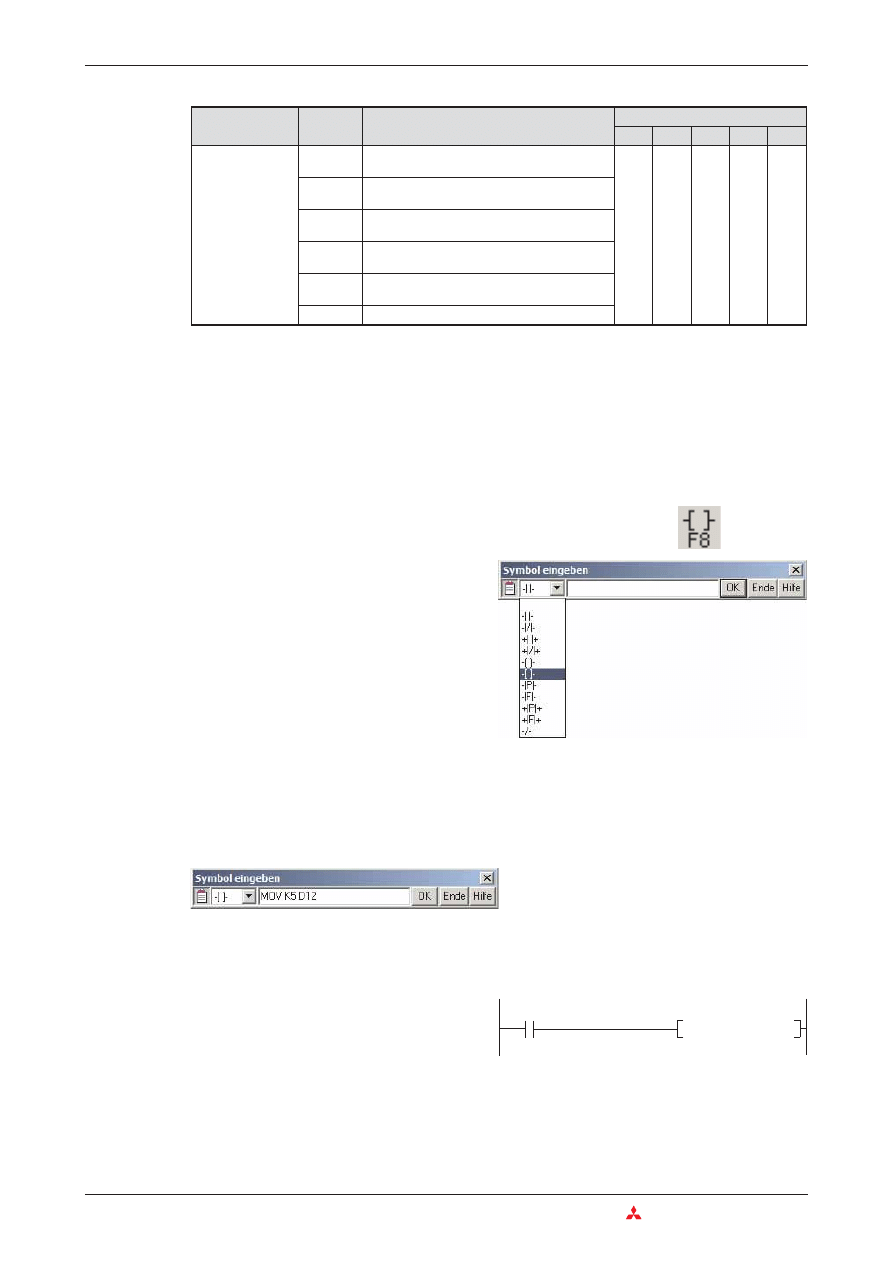
5.1.1
Wprowadzenie do instrukcji użytkowych
Programowanie instrukcji użytkowych w GX Developer FX jest łatwe. Należy umieścić kursor w
takim miejscu linii programu, gdzie chcemy wprowadzić instrukcję i wpisać skrót instrukcji oraz jej
operand(y). GX Developer automatycznie zarejestruje, że instrukcja została wprowadzona i
otworzy okno dialogowe (patrz niżej). Alternatywnie można również umieścić kursor w odpow-
iednim miejscu, a następnie na na pasku narzędzi kliknąć polecenie "wstaw"
.
Następnie w polu wejściowym należy wprowadzić skrót instrukcji i jej operand(y), oddzielając je
spacją.
Wszystkie liczby muszą być poprzedzone literą, która identyfikuje typ urządzenia, lub - w przypadku
stałych - określa format liczby. Litera "K" identyfikuje stałe dziesiętne, natomiast "H" identyfikuje
stałe szesnastkowe.
Przycisk
Help
otwiera okienko dialogowe, które można przeszukiwać pod kątem instrukcji,
odpowiedniej do wykonywanej funkcji. Pomoc zawiera również informacje jak funkcje pracują oraz
rodzaj i numery urządzeń, które mogą zostać użyte jako operandy.
Jeśli programowanie odbywa się w formacie listy instrukcji, do pojedynczej linii należy wprowadzić
instrukcje i jej operand(y), oddzielone spacją.
5 – 6
MITSUBISHI ELECTRIC
Instrukcje użytkowe
Programowanie zaawansowane
Instrukcję można również wybrać z rozwijanej
listy, którą można wyświetlić klikając na ikonę
"
".
W przykładzie z lewej, instrukcja MOV użyta
została do wpisania wartości 5 do rejestru
danych D12.
MOV K5 D12
M457
Chcąc wprowadzić instrukcję użytkową do
programu, należy kliknąć na
OK
.
Kategoria
Instrukcja
Funkcja
Sterownik
FX
1S
FX
1N
FX
2N
FX
2NC
FX
3U
Instrukcje do
rozszerzonych
rejestrów zbioru
LOADR
Odczytuje dane z rozszerzonych rejestrów
zbioru
쏹
SAVER
Zapisuje dane do rozszerzonych rejestrów
zbioru
INITR
Inicjalizuje rejestry rozszerzone i rozszerzone
rejestry zbioru
LOGR
Odczytuje wartości z rejestrów rozszerzonych i
rozszerzonych rejestrów zbioru
RWER
Przepisuje dane z rejestrów rozszerzonych do
rozszerzonych rejestrów zbioru
INITER
Incjalizuje rozszerzone rejestry zbioru
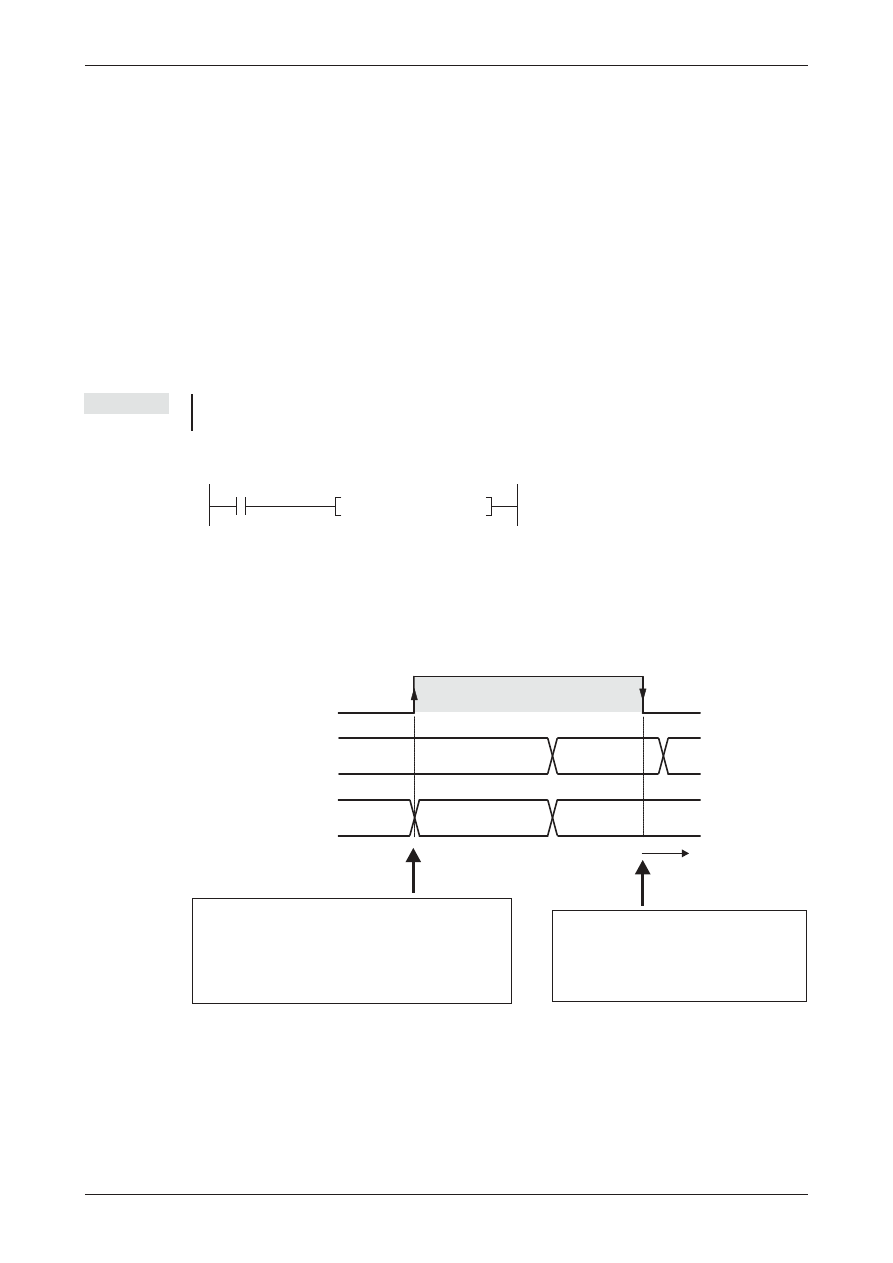
5.2
Instrukcje do przenoszenia danych
PLC używa rejestru danych do przechowywania pomiarów, wartości wyjściowych, pośrednich
wyników działań i wartości w tablicach. Instrukcje matematyczne sterownika mogą odczytywać
operandy bezpośrednio z rejestrów danych i, jeśli jest taka potrzeba, mogą również zapisywać
wyniki z powrotem do rejestrów. Instrukcje te są również wspomagane przez dodatkową instrukcję
"przenoszenia", która pozwala kopiować dane z jednego rejestru do innego i zapisywać wartości
stałe do rejestrów danych.
5.2.1
Przenoszenie pojedynczych wartości instrukcją MOV
Instrukcja MOV "przenosi" daną z wyspecyfikowanego źródła do wyspecyfikowanego miejsca
docelowego.
UWAGA
Należy zauważyć, że pomimo nazwy, jest to faktycznie proces kopiowania – dana nie jest usuwa-
na ze źródła operacji.
��� Źródło danej (to może być również stała)
��� Dana docelowa (wynikowa)
W przykładzie, wartość w rejestrze danych D10, zostanie skopiowana do rejestru D200, gdy wejście
X1 zostanie załączone. Skutkuje to następującą sekwencją sygnałów:
Wykonanie instrukcji MOV wyzwalanej impulsowo
W niektórych zastosowaniach jest lepiej, jeśli wartość jest zapisywana w miejsce docelowe tylko w
jednym cyklu programu Może istnieć taka potrzeba, jeśli na przykład inne instrukcje w programie
również wpisują do tego samego miejsca docelowego, lub jeśli operacja przeniesienia musi być
wykonana w określonej chwili.
Podręcznik dla początkujących
5 – 7
Programowanie zaawansowane
Instrukcje do przenoszenia danych
MOV D10 D200
0
Schemat drabinkowy
Lista instrukcji
0 MOV
D10
D200
���
���
���
���
D10
D200
X001
t
5384
5384
2271
963
963
125
Zawartość źródła danych będzie kopiowana do
docelowej danej tak długo, dopóki warunek
wejściowy określany jest jako prawda. Operacja
kopiowania nie zmienia zawartości źródła
danych.
Gdy warunek wejściowy nie jest już
prawdą, instrukcja nie będzie dłużej
zmieniała zawartości danej
docelowej.
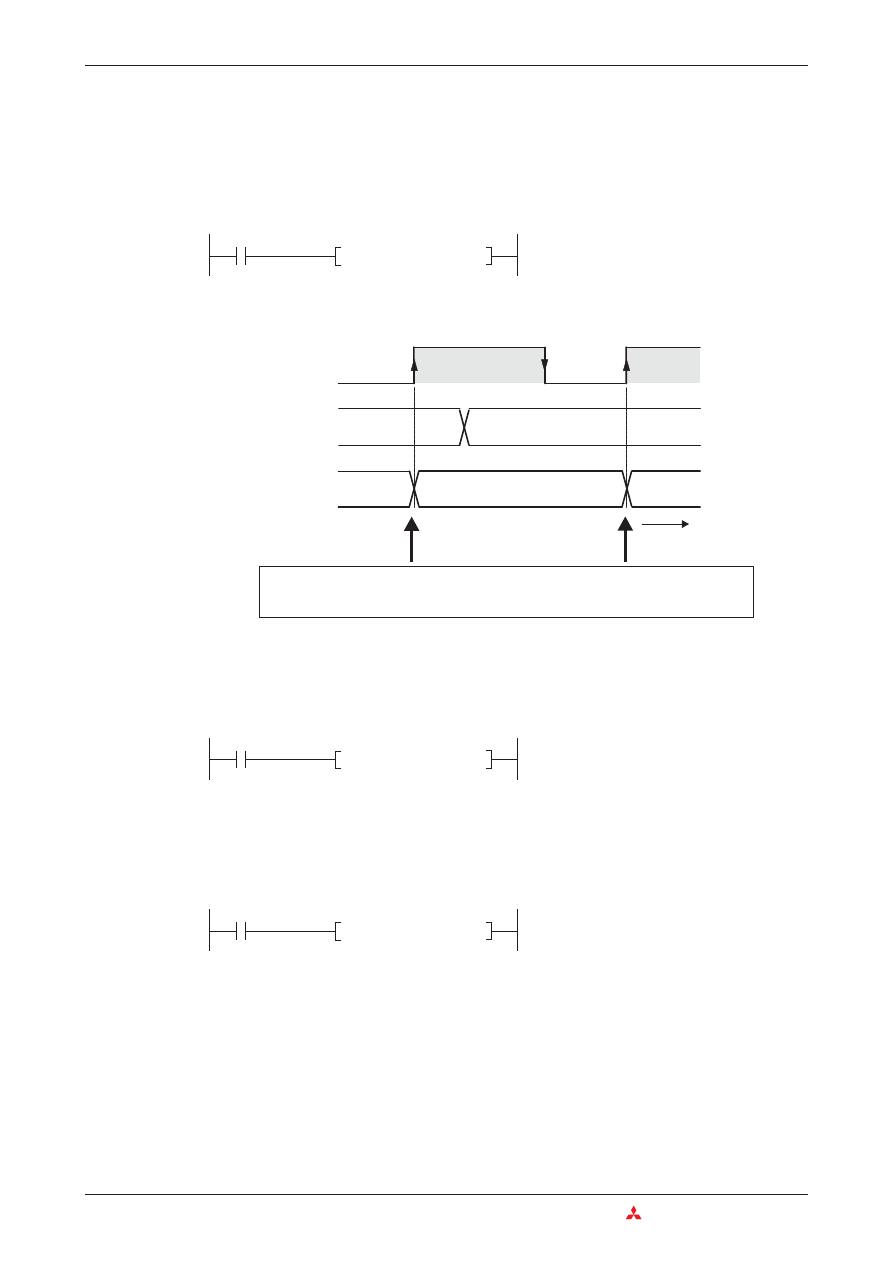
Jeśli do instrukcji MOV dodany zostanie znak "P" (MOVP), zostanie ona wykonana jednorazowo, na
narastającym zboczu impulsu wygenerowanego przez warunek wejściowy.
W poniższym przykładzie, gdy stan M110 zmieni się z "0" na"1", zawartość D20 zostanie wpisana do
rejestru danych D387.
Po wykonaniu tej pojedynczej operacij nawet, jeśli M110 pozostanie ustawiony, kopiowanie do
rejestru D387 zatrzyma się. Ilustruje to poniższa sekwencja sygnałów:
Przenoszenie 32-bitowej danej
Przenosząc 32-bitową daną, instrukcję MOV należy poprzedzić znakiem "D" (DMOV):
Gdy wejście X010 jest załączone, bieżąca wartość 32-bitowego licznika C200 zostaje wpisana do
rejestru danych D40 i D41. D40 zawiera najmniej znaczące bity.
Jak można sobie wyobrazić, jest również impulsowa wersja 32-bitowej instrukcji DMOV:
Gdy przekaźnik M10 jest ustawiony, zawartość rejestrów D10 i D11 zostaje wpisana do rejestrów
D610 i D611.
5 – 8
MITSUBISHI ELECTRIC
Instrukcje do przenoszenia danych
Programowanie zaawansowane
D20
D387
M110
t
4700
4700
6800
3300
3300
Zawartość źródła danych jest kopiowana do miejsca docelowego, tylko na
zboczu narastającym impulsu warunku wejściowego.
DMOV C200 D40
X010
0
Schemat drabinkowy
Lista instrukcji
0 LD
X010
1 DMOV
C200
D40
Schemat drabinkowy
Lista instrukcji
0 LD
M10
1 DMOVP D10
D610
DMOVP D10 D610
M10
0
MOVP D20 D387
M110
0
Schemat drabinkowy
Lista instrukcji
0 LD
M110
1 MOVP
D20
D387
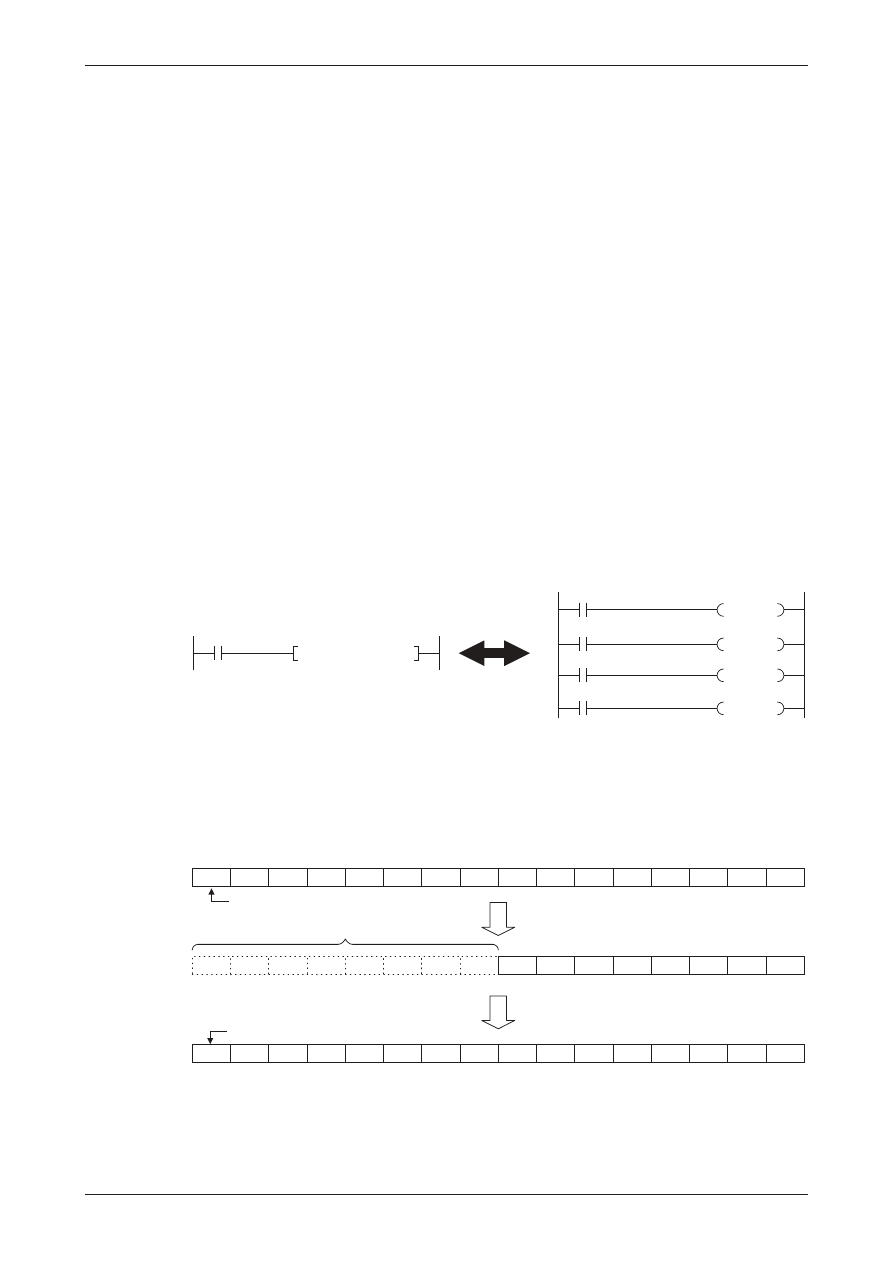
5.2.2
Przenoszenie grup urządzeń bitowych
W poprzedniej sekcji pokazano, w jaki sposób można użyć instrucji MOV do zapisania stałej lub
zawartości rejestrów do innych rejestrów danych. Kolejno występujące przekaźniki i inne urządze-
nia bitowe mogą być również wykorzystane do przechowywania wartości cyfrowych. Za pomocą
instrukcji użytkowych można je skopiować jako grupę. Wykonując to, adres pierwszego urządzenia
bitowego poprzedzamy współczynnikiem "K", określającym liczbę urządzeń, które tą instrukcją
mają być skopiowane.
Urządzenia bitowe liczone są w grupach po 4, tak, że współczynnik K określa liczbę tych grup po 4.
K1 = 4 urządzenia, K2 = 8 urządzeń, K3 = 12 urządzeń itd.
Przykładowo, K2M0 określa 8 przekaźników od M0 do M7. Obsługiwany zakres wynosi K1
(4 urządzenia) do K8 (32 urządzenia).
Przykłady adresowania grup urządzeń bitowych:
–
K1X0:
4 wejścia, zaczynając od X0
(X0 do X3)
–
K2X4:
8 wejść, zaczynając od X4
(X4 do X13, notacja ósemkowa)
–
K4M16: 16 przekaźników, zaczynając od M16
(M16 do M31)
–
K3Y0:
12 wyjść, zaczynając od Y0
(Y0 do X13, notacja ósemkowa)
–
K8M0:
32 przekaźniki, zaczynając od M0
(M0 do M31)
Adresując złożone urządzenia bitowe za pomocą pojedynczej instrukcji, programuje się szybciej i
tworzy bardziej zwarte programy. Kolejne dwa przykłady przekazują sygnały stanów przekaźników
M0 - M4, do wyjść Y10 - Y14:
Jeśli zakres docelowy jest mniejszy od zakresu źródłowego, bity nadmiarowe są po prostu pomijane
(zob. następną ilustrację, przykład górny). Jeśli zakres docelowy jest większy od źródłowego, do
nadmiarowych urządzeń wpisywane jest "0". Należy zauważyć, że jeśli tak się stanie, to wynik jest
zawsze dodatni, ponieważ bit 15 interpretowany jest jako bit znaku (niższy przykład w kolejnej
ilustracji).
Podręcznik dla początkujących
5 – 9
Programowanie zaawansowane
Instrukcje do przenoszenia danych
M0
Y010
M1
Y011
M2
Y012
M3
Y013
MOV K1M0 K1Y010
M8000
M15
M8
M7
M0
0
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
0
0
0
0
0
0
0
0
0
1
0
1
0
1
0
1
M6
M5
M12 M11 M10
M9
M4
M3
M2
M1
M14 M13
Przekaźniki te nie będą zmienione
Bit znaku (0: dodatni, 1: ujemny)
Bit znaku (0: dodatni, 1: ujemny)
MOV D0 K2 M0
MOV K2 M0 D1
Bit 0
Bit 15
Bit 0
Bit 15
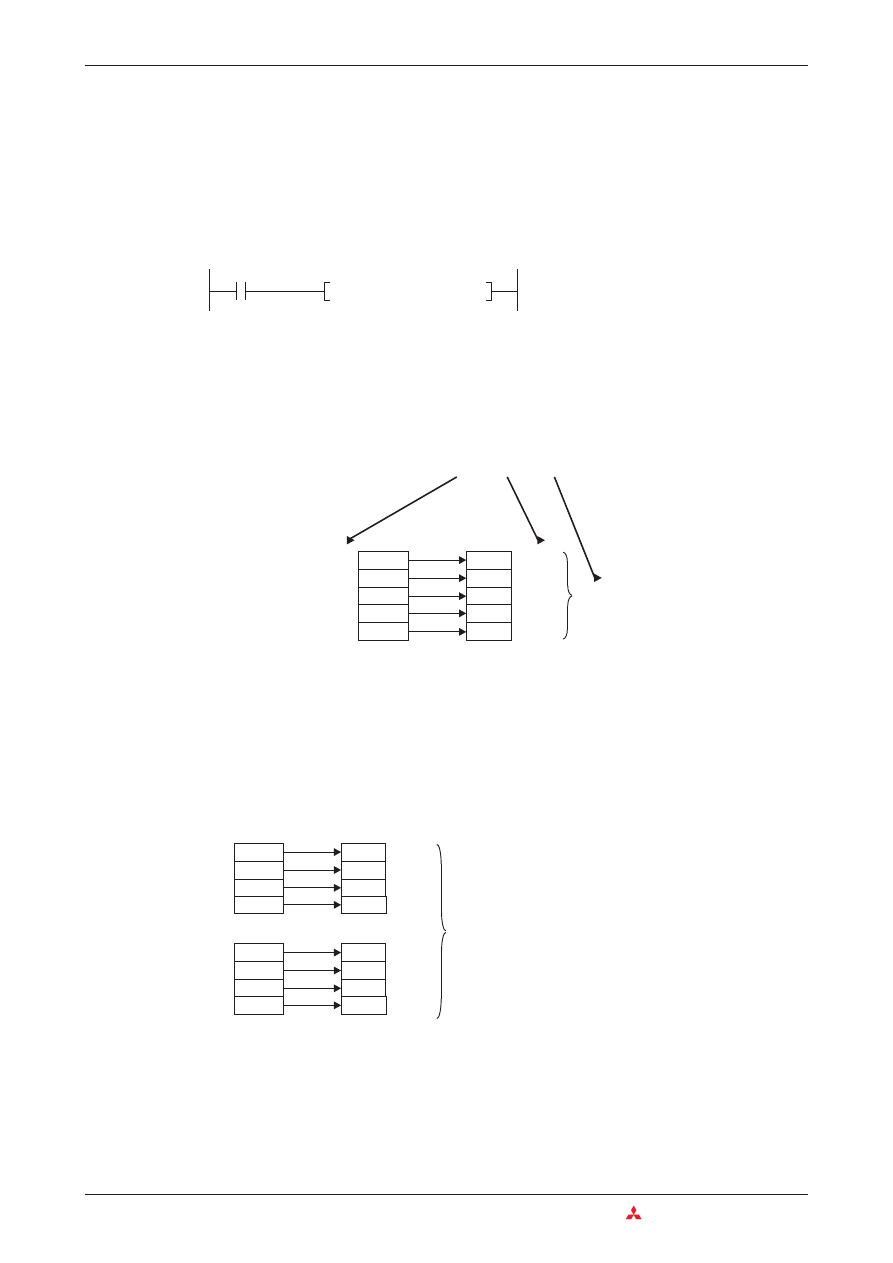
5.2.3
Przenoszenie bloków danych za pomocą instrukcji BMOV
Instrukcja MOV opisana w dziale 5.2.1, może tylko zapisać do urządzenia docelowego 16 lub
32-bitową wartość. Jeśli się chce, do przenoszenia ciągłych bloków danych można zaprogramować
wielokrotne sekwencje instrukcji MOV. Jednak bardziej sprawne jest użycie instrukcji BMOV (Block
MOVe), przewidzianej specjalnie do tego zastosowania.
��� Źródło danych (16-bitowe urządzenie, pierwsze urządzenie z obszaru źródłowego)
��� Dane docelowe (16-bitowe urządzenie, pierwsze urządzenie z obszaru docelowego)
��� Liczba przenoszonych elementów (maks. 512)
Powyższy przykład pracuje nastepująco:
Instrukcja BMOV ma również wersję impulsową, BMOVP (szczegóły impulsowego wykonania
instrukcji, zob. dział 5.1.2)
Bloki urządzeń bitowych: gdy za pomocą instrukcji BMOV przenoszone są bloki urządzeń bitowych,
współczynniki K danych źródłowych i danych docelowych, muszą zawsze być jednakowe.
Przykład
5 – 10
MITSUBISHI ELECTRIC
Instrukcje do przenoszenia danych
Programowanie zaawansowane
BMOV D10 D200 K5
0
Schemat drabinkowy
Lista instrukcji
0 BMOV
D10
D200
K5
���
���
���
���
���
���
D 10
D 11
D 12
D 13
D 200
D 201
D 202
D 203
D 14
D 204
1234
5678
-156
8765
4321
1234
5678
-156
8765
4321
BMOV D10 D200 K5
5 rejestrów danych
M0
M1
M2
M3
Y000
Y001
Y002
Y003
0
1
1
0
0
1
1
0
BMOV K1M0 K1Y0 K2
M4
M5
M6
M7
Y004
Y005
Y006
Y007
1
0
1
0
1
0
1
0
Kopiuje 2 bloki po 4 urządzenia
bitowe każdy.
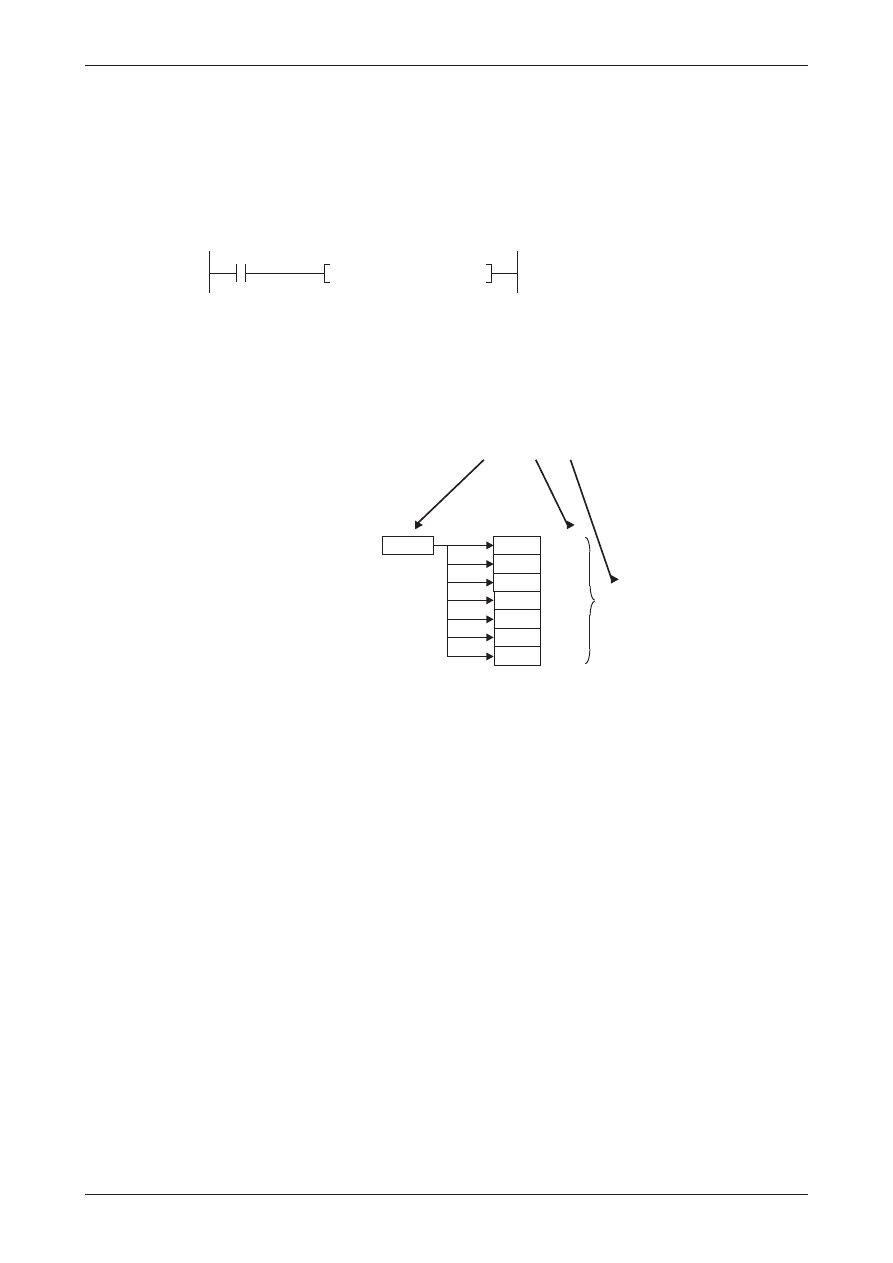
5.2.4
Kopiowanie urządzeń źródłowych do wielu miejsc docelowych (FMOV)
Instrukcja FMOV (Fill MOVe) kopiuje zawartość słowa lub podwójnego słowa lub stałą do wielu
kolejnych słów lub podwójnych urządzeń typu słowo. Jest to głównie stosowane do kasowania
tablicy danych i do ustawiania rejestrów danych na zdefiniowaną wcześniej wartość początkową.
��� Dana wpisywana do urządzeń docelowych (stała może być tutaj również użyta)
��� Dana docelowa (pierwsze urządzenie z obszaru docelowego)
��� Liczba elementów zapisywanych w obszarze docelowym (maks. 512)
Kolejny przykład wpisuje wartość "0" do 7 elementów:
Instrukcja FMOV ma również wersję impulsową, FMOVP (szczegóły impulsowego wykonania
instrukcji, zob. dział 5.1.2)
Można również przekazywać dane 32-bitowe, poprzedzając instrukcję znakiem "D" (DFMOV i
DFMOVP).
Podręcznik dla początkujących
5 – 11
Programowanie zaawansowane
Instrukcje do przenoszenia danych
7 słów danych
FMOV D4 D250 K20
0
Schemat drabinkowy
Lista instrukcji
0 FMOV
D4
D250
K20
���
���
���
���
���
���
D 10
D 11
D 12
D 13
D 14
0
FMOV K0 D10 K7
0
0
0
0
0
0
0
D 15
D 16
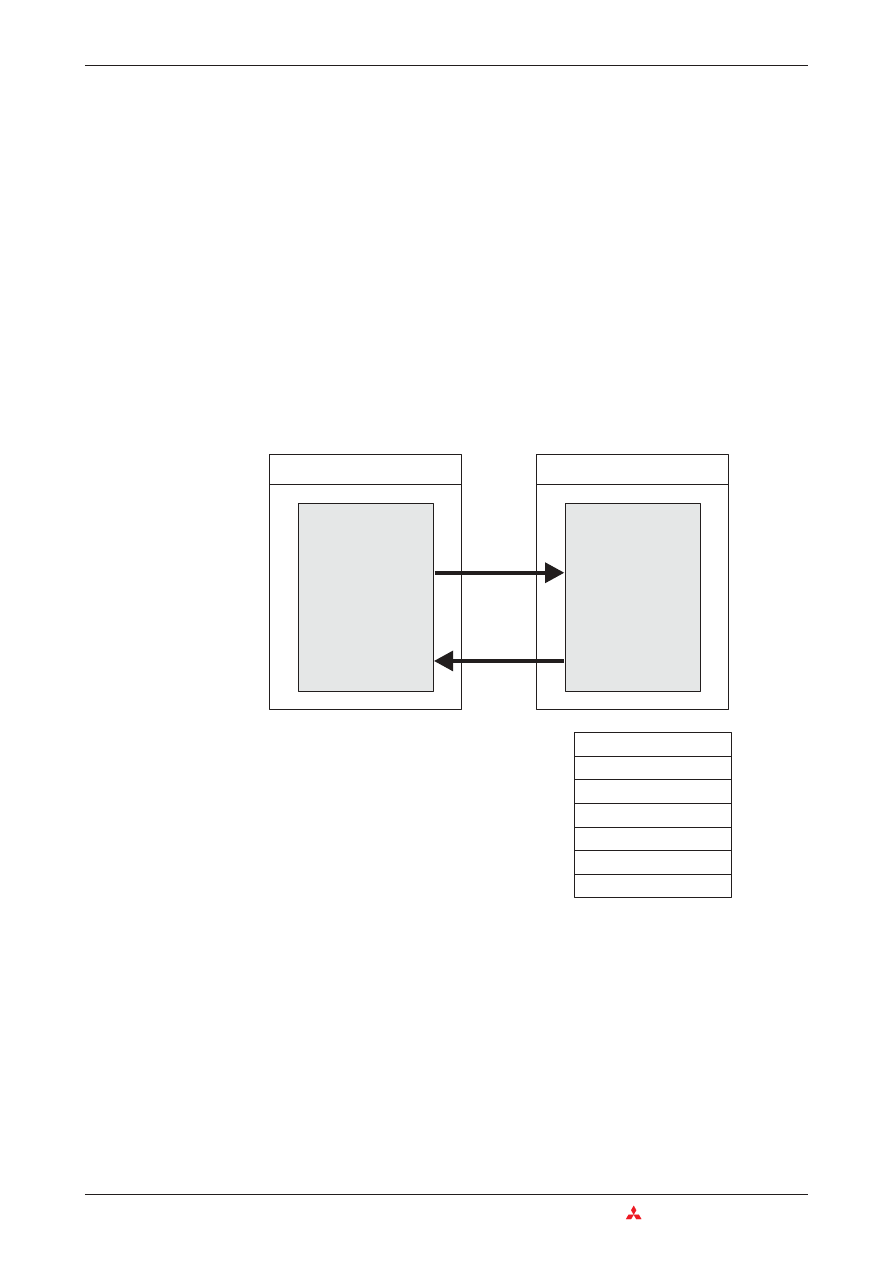
5.2.5
Wymiana danych ze specjalnymi modułami funkcyjnymi
W celu zwiększenia liczby wejść i wyjść, dostępnych we wszystkich jednostkach centralnych serii
MELSEC FX (za wyjątkiem modeli FX1S), można dodać moduły rozszerzające. Dodatkowo można
również uzupełnić funkcje sterownika, dodając tak zwane "specjalne moduły funkcyjne" - na
przykład do odczytu sygnałów analogowych prądowych i napięciowych, do sterowania temperatu-
rami i do komunikacji z urządzeniami zewnętrznymi.
Cyfrowe moduły rozszerzające we/wy nie wymagają specjalnych instrukcji; dodatkowe wejścia i
wyjścia obsługiwane są dokładnie w taki sam sposób, jak znajdujące się w jednostce centralnej.
Komunikacja pomiędzy jednostką centralną i specjalnymi modułami funkcyjnymi, przeprowadz-
ana jest przy pomocy dwóch specjalnych instrukcji użytkowych: instrukcjami FROM i TO.
Każdy specjalny moduł funkcyjny posiada obszar pamięci, przydzielony jako bufor do czasowego
przechowywania danych, takich jak wartości pomiarów analogowych lub odbierane dane. Jed-
nostka centralna może mieć dostęp do tego bufora i odczytać z niego przechowywane wartości
oraz zapisać nowe wartości, które moduł może następnie przetworzyć (ustawienia funkcji modułu,
dane do transmisji itd.).
Gdy używane są instrukcje FROM i TO, potrzebna jest następująca informacja:
–
Odczytywany lub zapisywany specjalny moduł funkcyjny
–
Adres pierwszej odczytywanej lub zapisywanej komórki pamięci buforowej
–
Liczba odczytywanych lub zapisywanych komórek pamięci buforowej
–
Położenie w jednostce centralnej, gdzie dane z modułu są zapisywane, lub przechowywane są
dane zapisywane do modułu
5 – 12
MITSUBISHI ELECTRIC
Instrukcje do przenoszenia danych
Programowanie zaawansowane
Jednostka centralna
Specjalny blok funkcyjny
Pamięć buforowa
Pamięć urządzenia
TO
FROM
Pamięć buforowa może mieć aż do 32767
pojedynczo adresowalnych komórek pamięci, a
każda z nich może przechować 16-bitową daną.
Funkcje komórek pamięci buforowej zależą od
p o s z c z e g ó l n y c h s p e c j a l n y c h m o d u ł ó w
funkcyjnych – zobacz szczegóły w dokumentacji
modułu.
Adres pamięci buforowej 0
Adres pamięci buforowej 1
Adres pamięci buforowej 2
Adres pamięci buforowej n
Adres pamięci buforowej n-1
:
:
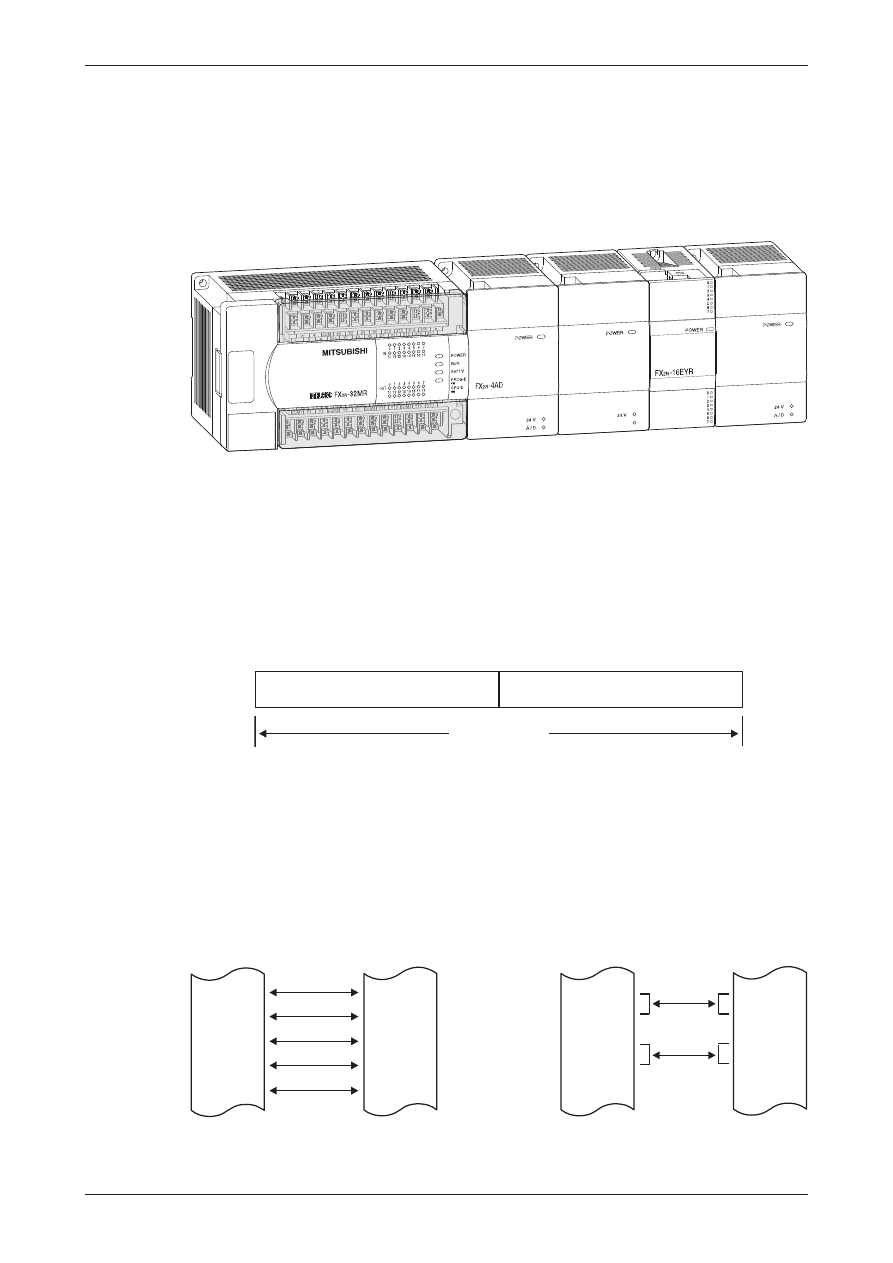
Adres specjalnego modułu funkcyjnego
Ponieważ do jednego sterownika można dołączyć wiele specjalnych modułów funkcyjnych, każdy
moduł musi mieć unikalny identyfikator, który pozwala na przekazywanie danych w obydwie
strony. Każdy moduł jest automatycznie oznaczany cyfrowym identyfikatorem z zakresu 0 - 7
(można podłączyć maksymalnie 8 specjalnych modułów funkcyjnych). Numery przydzielane są w
kolejności, w której moduły podłączone są do PLC.
Adres początkowy w pamięci buforowej
Każdy spośród 32 767 adresów buforów może być bezpośrednio zaadresowny w notacji dzies-
iętnej, w zakresie od 0 – 32 767 (FX1N: 0 – 31). Przy dostępie do 32-bitowych danych należy
wiedzieć, że komórka pamięci z niższym adresem, przechowuje młodsze 16 bitów, a komórka z
wyższym adresem przechowuje starsze 16 bitów.
Oznacza to, że adres początkowy 32-bitowej danej jest zawsze adresem wskazującym w podw-
ójnym słowie mniej znaczące 16 bitów.
Liczba przekazywanych jednostek danych
Ilość danych definiowana jest przez liczbę przekazywanych jednostek danych. Gdy wykonywana
jest instrukcja FROM lub TO w formacie 16-bitowym, parametrem tym jest liczba przekazywanych
słów. W przypadku formatu 32-bitowego DFROM i DTO, parametr ten określa przekazywaną liczbę
podwójnych słów.
Podręcznik dla początkujących
5 – 13
Programowanie zaawansowane
Instrukcje do przenoszenia danych
24-
24+
SLD
SLD
SLD
L-
L-
SLD
L-
L-
L+
L+
L+
L+
FX2N-4AD-TC
FX -4AD-PT
2N
24-
24+
FX2N-4D
A
V+
V+
V+
I+
I+
V+
I+
I+
VI-
VI-
VI-
VI-
FX -4DA
2N
D / A
24-
V+
V+
V+
I+
I+
V+
I+
I+
24+
VI-
VI-
FG
FG
VI-
VI-
FG
Specjalny moduł
funkcyjny 0
Moduł 1
Moduł 2
Młodsze 16 bitów
Starsze 16 bitów
Adres bufora n+1
Adres bufora n
Słowo 32-bitowe
D100
D101
D102
D103
D104
Adr. 5
Adr. 6
Adr. 7
Adr. 8
Adr. 9
D100
D101
D102
D103
D104
Adr. 5
Adr. 6
Adr. 7
Adr. 8
Adr. 9
Instrukcja 16-bitowa
Jednostki danych: 5
Instrukcja 32-bitowa
Jednostki danych: 2
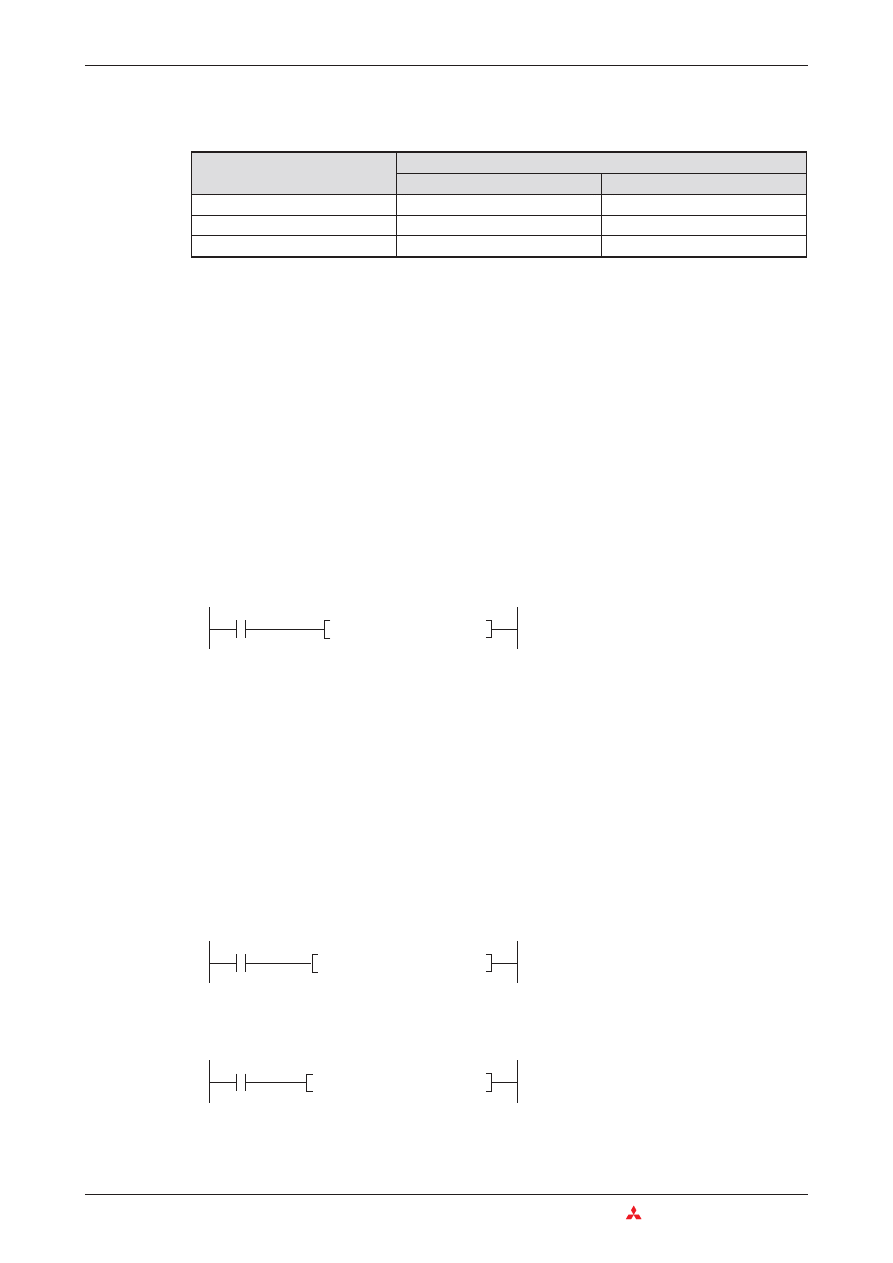
Wartość, jaką można wprowadzić w pole jednostek danych, zależy od zastosowanego modelu PLC
oraz od tego, czy używany jest 16-bitowy czy też 32-bitowy format instrukcji FROM:
Dana źródłowa i docelowa w jednostce centralnej
W większości przypadków dane będą odczytywane z rejestrów i zapisywane do specjalnych
modułów funkcyjnych, lub kopiowane z pamięci buforowej modułu do rejestrów danych w jednos-
tce centralnej. Można również użyć wyjść, przekaźników i wartości bieżącej timerów i liczników jako
danych źródłowych lub docelowych.
Wykonanie instrukcji wyzwalanych impulsowo
Jeśli do instrukcji dodany zostanie przyrostek "P", przekazanie danych inicjowane jest impulsem
wyzwalającym (w sprawie szczegółów patrz opis instrukcji MOV w sekcji 5.2.1).
Jak używać instrukcję FROM
Instrukcja FROM używana jest do przekazywania danych z pamięci buforowej specjalnego modułu
funkcyjnego, do jednostki centralnej sterownika. Zwracamy uwagę, że jest to operacja kopiowania -
zawartość danej w pamięci buforowej modułu nie ulega zmianie.
��� Adres specjalnego modułu funkcyjnego (0 do 7)
��� Adres początkowy w pamięci buforowej (FX1N: 0 – 31, FX2N, FX2NC i FX3U: 0 – 32,766). Można
użyć stałej lub rejestru danych zawierającego tę wartość.
��� Dana docelowa w jednostce centralnej sterownika
��� Liczba przekazywanych jednostek danych
Powyższy przykład używa instrukcji FROM do przekazania danej z modułu przetwornika anal-
ogowo/cyfroweg FX2N-4AD mającego adres 0. Instrukcja odczytuje z bufora o adresie 9 bieżącą
wartość kanału 1 i zapisuje ją do rejestru danych D0.
Następny przykład pokazuje, jak 32-bitowa wersja instrukcji używana jest do odczytu danych z
adresu 2 w specjalnym module funkcyjnym. Instrukcja ta, zaczynając od bufora o adresie 8, odczyt-
uje 4 podwójne słowa i zapisuje je do rejestrów danych D8 - D15.
Następny przykład ilustruje użycie wersji wyzwalanej impulsowo, FROMP. Tutaj zawartość czterech
buforów o adresach 0 - 3, przekazywana jest do rejestrów danych D10 - D13, tylko wtedy, gdy stan
sygnału warunku wejściowego zmienia się z "0" na "1".
5 – 14
MITSUBISHI ELECTRIC
Instrukcje do przenoszenia danych
Programowanie zaawansowane
FROM K0 K9 D0 K1
0
Schemat drabinkowy
Lista instrukcji
0 FROM
K0
K9
D0
K1
��� ���
���
���
���
���
���
���
DFROM K2 K8 D8 K4
0
FROMP K0 K0 D10 K4
0
Model PLC
Dopuszczalny zakres przekazywanej liczby jednostek danych
Instrukcja 16-bitowa (FROM, TO)
Instrukcja 32-bitowa (DFROM, DTO)
FX
2N
1 do 32
1 do 16
FX
2NC
1 do 32
1 do 16
FX
3U
1 do 32767
1 do 16383
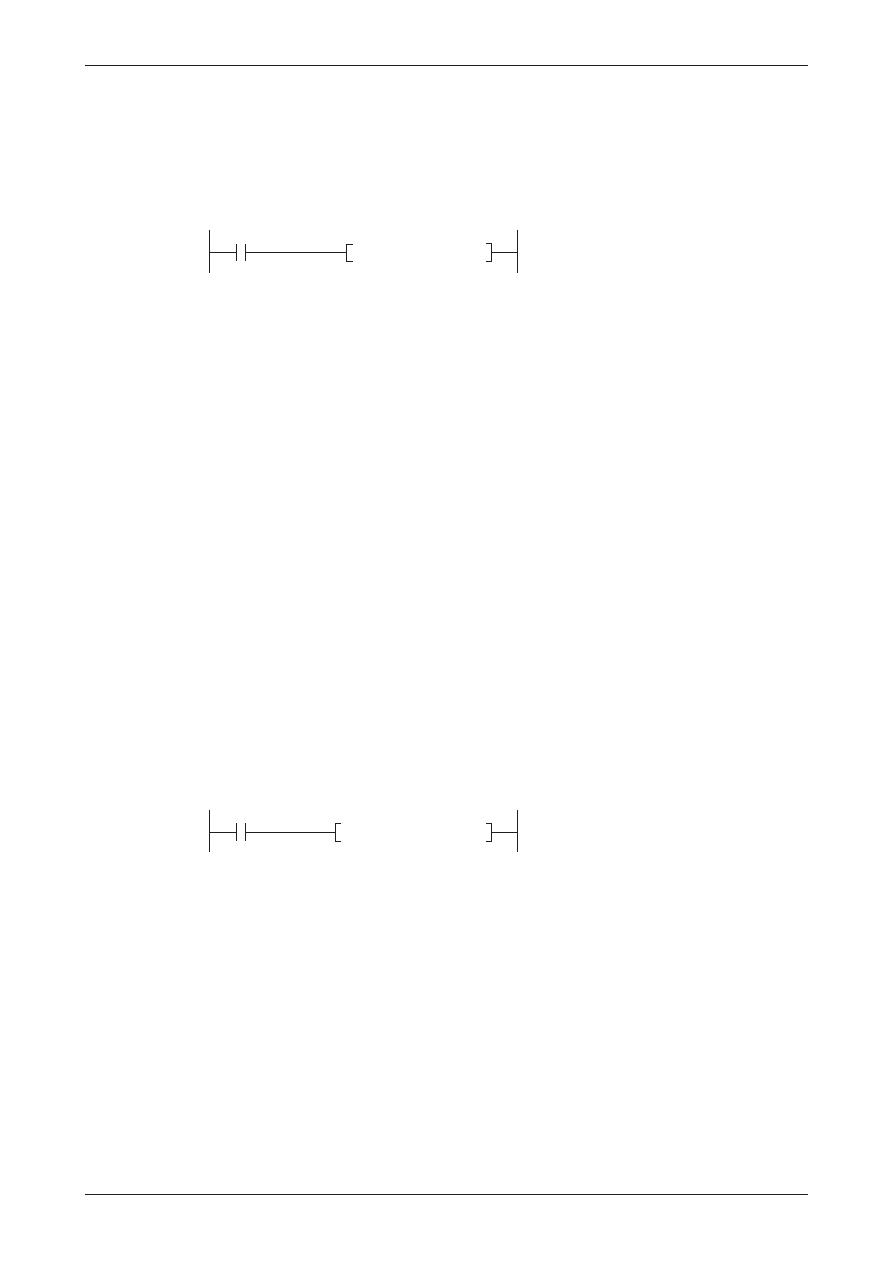
Jak używać instrukcję TO
Instrukcja TO przekazuje dane z jednostki centralnej sterownika do pamięci buforowej specjalnego
modułu funkcyjnego. Zwracamy uwagę, że jest to operacja kopiowania, która nie zmienia zawa-
rtości źródła danej.
��� Adres specjalnego modułu funkcyjnego (0 - 7)
��� Adres początkowy w pamięci buforowej (FX1N: 0 – 31, FX2N, FX2NC i FX3U: 0 – 32,766). Można
użyć stałej lub rejestru danych zawierającego tę wartość.
��� Dana źródłowa w jednostce centralnej sterownika
��� Liczba przekazywanych jednostek danych
W powyższym przykładzie zawartość rejestru danych D0 kopiowana jest do bufora o adresie 1, w
specjalnym module funkcyjnym numer 0.
5.3
Instrukcje porównania
Sprawdzanie statusu urzędzeń bitowych, takich jak wejścia i przekaźniki, może być realizowane
przy pomocy podstawowych instrukcji logicznych, ponieważ urządzenia te mogą przyjmować
tylko dwa stany, "0" i "1". Równie często, przed zrobieniem czegokolwiek, zachodzi potrzeba spraw-
dzania zawartości urządzeń typu słowo - na przykład, po przekroczeniu określonej temperatury
zadanej - załączenie wentylatora chłodzącego. Sterowniki rodziny MELSEC FX dostarczają wiele
różnych sposobów na porównanie danych.
5.3.1
Instrukcja CMP
Instrukcja CMP porównuje dwie wartości cyfrowe, które mogą być stałymi lub zawartością rejest-
rów danych. Można również porównywać wartości bieżące timerów i liczników. W zależności od
wyniku porównania (większy niż, mniejszy niż lub równy), ustawiany jest jeden z trzech bitów.
��� Warunek wejściowy
��� Pierwsza porównywana wartość
��� Druga porównywana wartość
��� Pierwszy z trzech kolejnych przekaźników lub wyjść, które ustawiane są w zależności od wyniku
porównania (stan sygnału "1"):
1. Urządzenie 1: ON, jeśli wartość 1 > wartość 2
2. Urządzenie 2: ON, jeśli wartość 1 = wartość 2
3. Urządzenie 3: ON, jeśli wartość 1 < wartość 2
W tym przykładzie instrukcja CMP steruje przekaźnikami M0, M1 i M2. M0 jest "1", jeśli zawartość
D0 jest większa niż 100; M1 jest "1", jeśli zawartość D0 jest dokładnie równa 100 i M2 jest "1", jeśli
zawartość D0 jest mniejsza niż 100. Stan tych trzech bitów jest utrzymywany nawet po wyłącze-
niu warunku wejściowego, ponieważ ich ostatni stan zostaje zapamiętany.
Podręcznik dla początkujących
5 – 15
Programowanie zaawansowane
Instrukcje porównania
TO K0 K1 D0 K1
0
Schemat drabinkowy
Lista instrukcji
0 TO
K0
K1
D0
K1
���
���
���
���
���
���
���
���
CMP D0 K100 M0
0
Schemat drabinkowy
Lista instrukcji
0 LD
....
1 CMP
D0
K100
M0
���
���
���
���
���
���
���
���
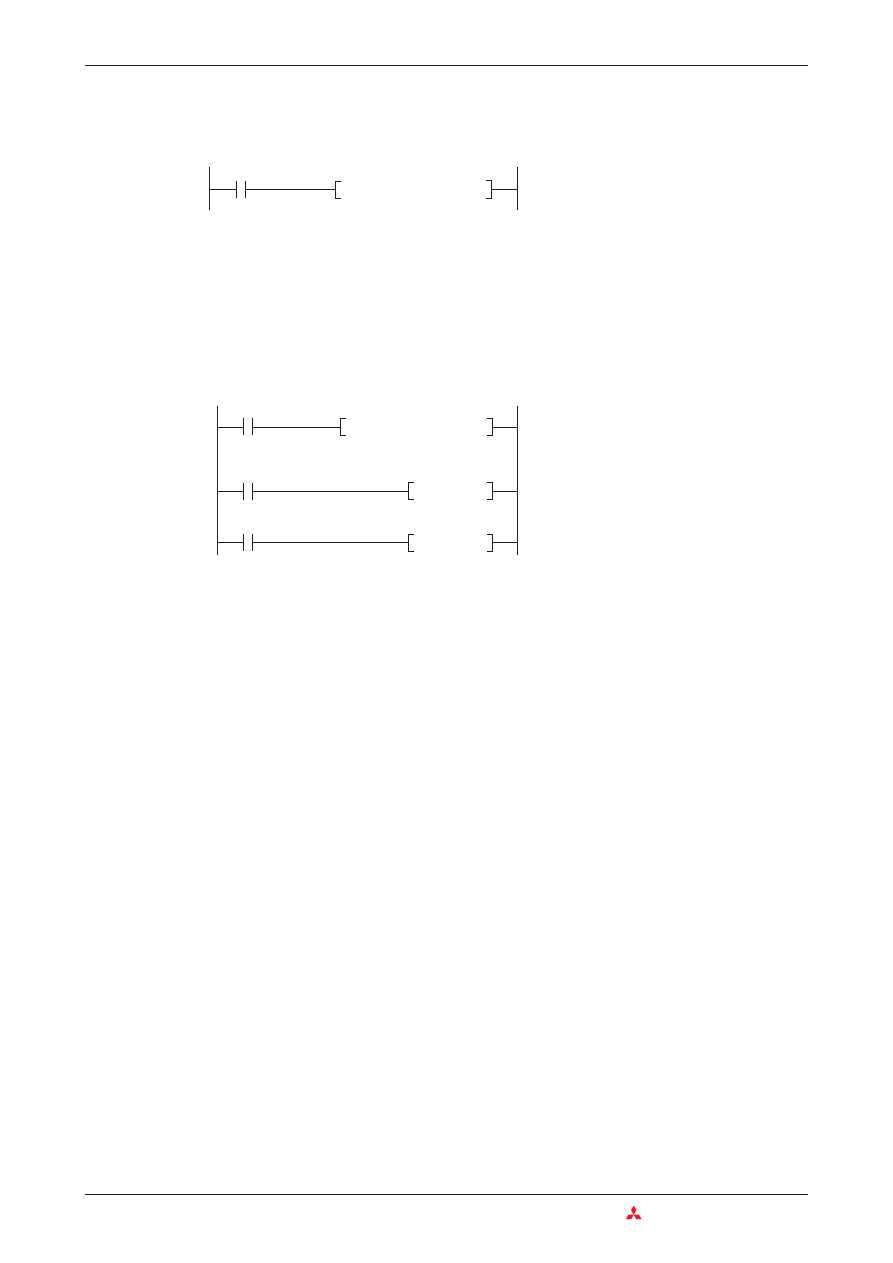
Do porównania 32-bitowej danej, należy użyć instrukcji DCMP zamiast CMP:
W powyższym przykładzie zawartość D0 i D1 porównywana jest z zawartością D2 i D3. Obsługa
trzech urządzeń bitowych, pokazujących wynik porównania, jest dokładnie taka sama, jak dla
16-bitowej wersji tej instrukcji.
Przykład zastosowania
W prosty sposób, za pomocą instrukcji CMP, można stworzyć dwupunktową pętlę sterowania:
W tym przykładzie instrukcja CMP wykonywana jest cyklicznie. Gdy PLC wykonuje program, M8000
zawsze jest w stanie "1". Rejestr D20 zawiera aktualną wartość temperatury w pokoju. Stała K22 jest
wartością zadaną temperatury 22°C. Przekaźniki M20 i M22 pokazują, kiedy temperatura zmieni się
powyżej lub poniżej wartości zadanej. Jeśli w pokoju jest za ciepło, wyjście Y0 wyłączy się. Jeśli tem-
peratura jest za niska, M22 załączy ponownie wyjście Y0. Wyjście to może być na przykład użyte do
sterowania pompą, w celu dodania gorącej wody.
Instrukcje porównania
Programowanie zaawansowane
5 – 16
MITSUBISHI ELECTRIC
CMP D20 K22 M20
M8000
RST Y000
M22
M20
SET Y000
0
8
10
Schemat drabinkowy
Lista instrukcji
0 LD
M8000
1 CMP
D20
K22
M20
8 LD
M20
9 RST
Y000
10 LD
M22
11 SET
Y0001
DCMP D0 D2 M0
0
Schemat drabinkowy
Lista instrukcji
0 LD
....
1 DCMP
D0
D2
M0
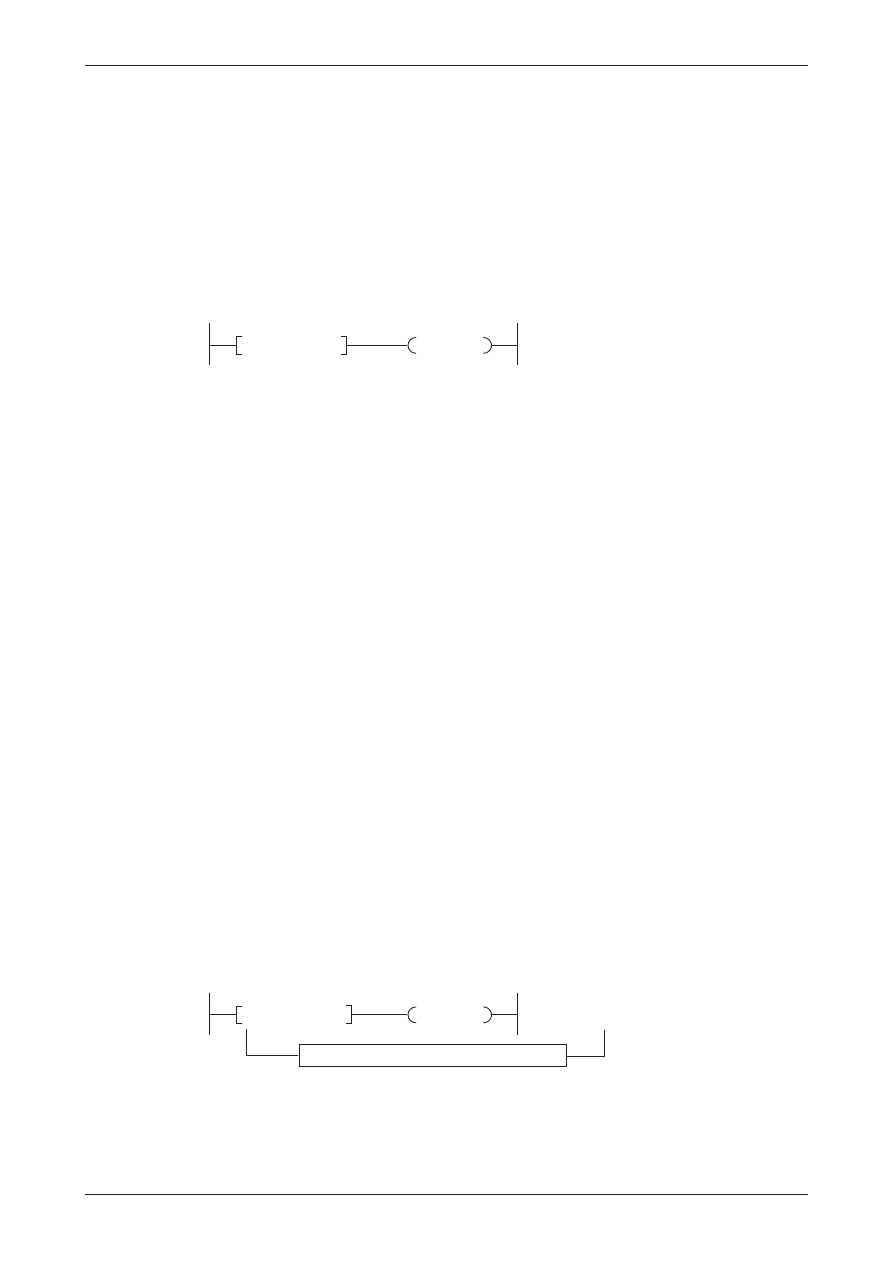
5.3.2
Porównanie wewnątrz operacji logicznych
W instrukcji CMP opisanej w ostatnim dziale, wynik porównania zapisywany jest do trzech urządzeń
bitowych. Jednak często zachodzi potrzeba wykonania instrukcji wyjściowej lub operacji logicznej
na podstawie wyniku porównania i zazwyczaj nie chcemy używać do tego celu trzech urządzeń
bitowych. Można to osiągnąć instrukcjami "load compare" (załaduj porównaj) oraz bitowymi oper-
acjami AND i OR.
Porównanie na początku operacji logicznej
��� Warunek porównania
��� Pierwsza porównywana wartość
��� Druga porównywana wartość
Jeśli warunek oceniany jest jako prawdziwy, stan sygnału po porównaniu ustawiany jest na "1". Stan
sygnału "0" wskazuje, że porównanie ocenione zostało jako fałszywe. Możliwe są następujace
porównania:
–
Porównanie typu "równość":
=
(wartość 1 = wartość 2)
Wyjście instrukcji ustawiane jest na "1", jeśli wartości obydwu urządzeń są sobie równe.
–
Porównanie typu "większy od":
>
(wartość 1 > wartość 2)
Wyjście instrukcji ustawiane jest na "1", jeśli pierwsza wartość jest większa od drugiej wartości.
–
Porównanie typu "mniejszy od":
>
(wartość 1 < wartość 2)
Wyjście instrukcji ustawiane jest na "1", jeśli pierwsza wartość jest mniejsza od drugiej wartości.
–
Porównanie typu "nie równy":
<>
(wartość 1 <> wartość 2)
Wyjście instrukcji ustawiane jest na "1", jeśli obydwie wartości nie są sobie równe.
–
Porównanie typu "mniejszy od lub równy":
<=
(wartość 1 m wartość 2)
Wyjście instrukcji ustawiane jest na "1", jeśli pierwsza wartość jest mniejsza od lub równa drugiej
wartości.
–
Porównanie typu "większy od lub równy":
>=
(wartość 1 M wartość 2)
Wyjście instrukcji ustawiane jest na "1", jeśli pierwsza wartość jest większa od lub równa drugiej
wartości.
Powyższy przykład sprawdza, czy zawartość rejestrów danych D10 i D11, jest większa od zawartości
rejestrów D25 i D251.
Powyższy przykład sprawdza, czy zawartość rejestrów danych D10 i D11, jest większa od zawartości
rejestrów D25 i D251.
Podręcznik dla początkujących
5 – 17
Programowanie zaawansowane
Instrukcje porównania
>= D40 D50
0
Schemat drabinkowy
Lista instrukcji
0 LD>=
D40
D50
���
���
���
���
���
���
D> D10 D250
0
Schemat drabinkowy
Lista instrukcji
0 LDD>
D10
D250
„D” określa 32-bitową daną
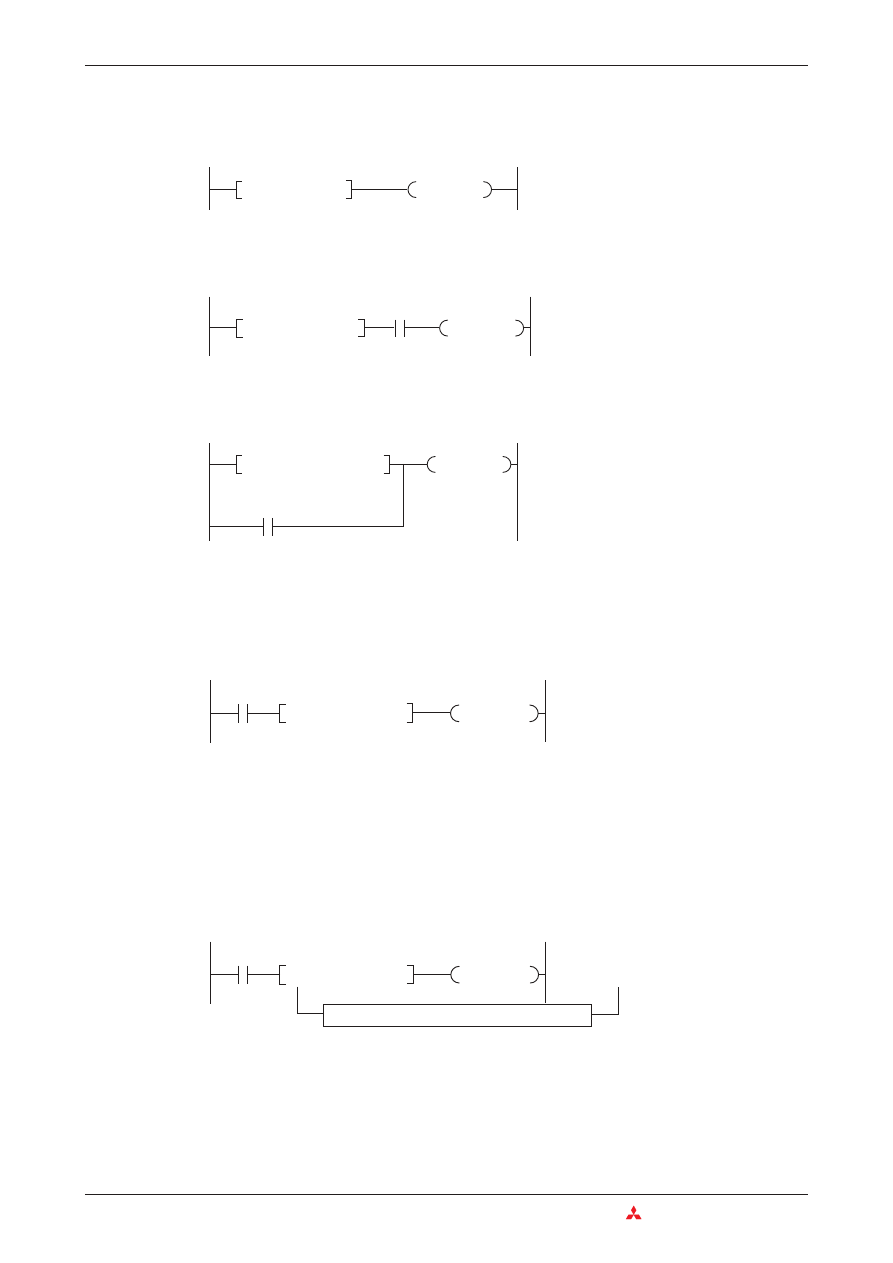
Więcej przykładów:
Gdy wartość licznika C0 jest równa lub większa od zawartości D20, przekaźnik M12 ustawiany jest na "1".
Gdy zawartość D10 jest większa od -2 500 i timer T5 zakończył pracę, wyjście Y003 zostaje załączone.
Jeśli wartość licznika C200 jest mniejsza od 182 547 lub przekaźnik M110 jest w stanie "1", przekaźnik
M53 zostaje ustawiony na "1".
Porównanie jako logiczna operacja AND
��� Warunek porównania
��� Pierwsza wartość porównania
��� Druga wartość porównania
AND wyniku porównania może być użyty tak, jak normalna instrukcja AND (zob. rozdział 3).
Tutaj opcje porównania są takie same, jak opisane wyżej porównania rozpoczynające operację. W
ten sposób można też porównać 32-bitowe wartości z operacją AND.
5 – 18
MITSUBISHI ELECTRIC
Instrukcje porównania
Programowanie zaawansowane
>= C0 D20
M12
0
Schemat drabinkowy
Lista instrukcji
0 LD>=
C0
D20
5 OUT
M12
> D10 K-2500
Y003
T52
0
Schemat drabinkowy
Lista instrukcji
0 LD>
D10
K-2500
5 AND
T52
6 OUT
Y003
M110
M53
D< C200 K182547
0
Schemat drabinkowy
Lista instrukcji
0 LDD<
C200
K182547
9 OR
M110
10 OUT
M53
<= D40 D50
0
Schemat drabinkowy
Lista instrukcji
0 LD
...
1 AND<=
D40
D50
���
���
���
���
���
���
D= D30 D400
0
Schemat drabinkowy
Lista instrukcji
0 ANDD= D30
D400
„D” określa 32-bitową daną
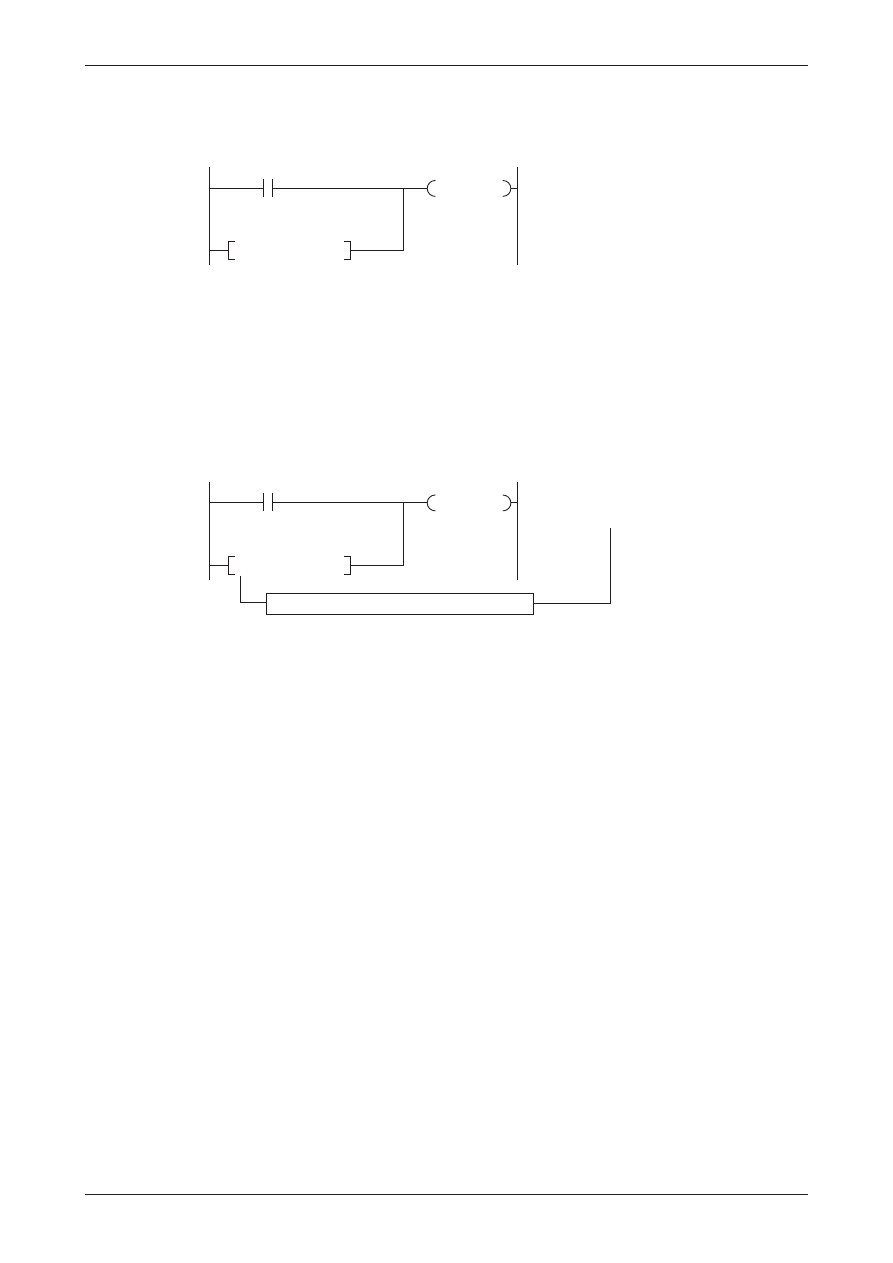
Porównanie jako logiczna operacja OR
��� Warunek porównania
��� Pierwsza wartość porównania
��� Druga wartość porównania
OR wyniku porównania może być użyty tak, jak normalna instrukcja OR (zob. rozdział 3).
Tutaj opcje porównania są takie same, jak opisane wyżej porównania rozpoczynające operację. W
ten sposób można też porównać 32-bitowe wartości z operacją OR:
Podręcznik dla początkujących
5 – 19
Programowanie zaawansowane
Instrukcje porównania
>= C20 K200
0
Schemat drabinkowy
Lista instrukcji
���
���
���
���
���
���
0 LD
...
1 OR>=
C20
K200
D= C200 D10
0
Schemat drabinkowy
Lista instrukcji
0 LD
...
1 ORD=
C200
D10
„D” określa 32-bitową daną
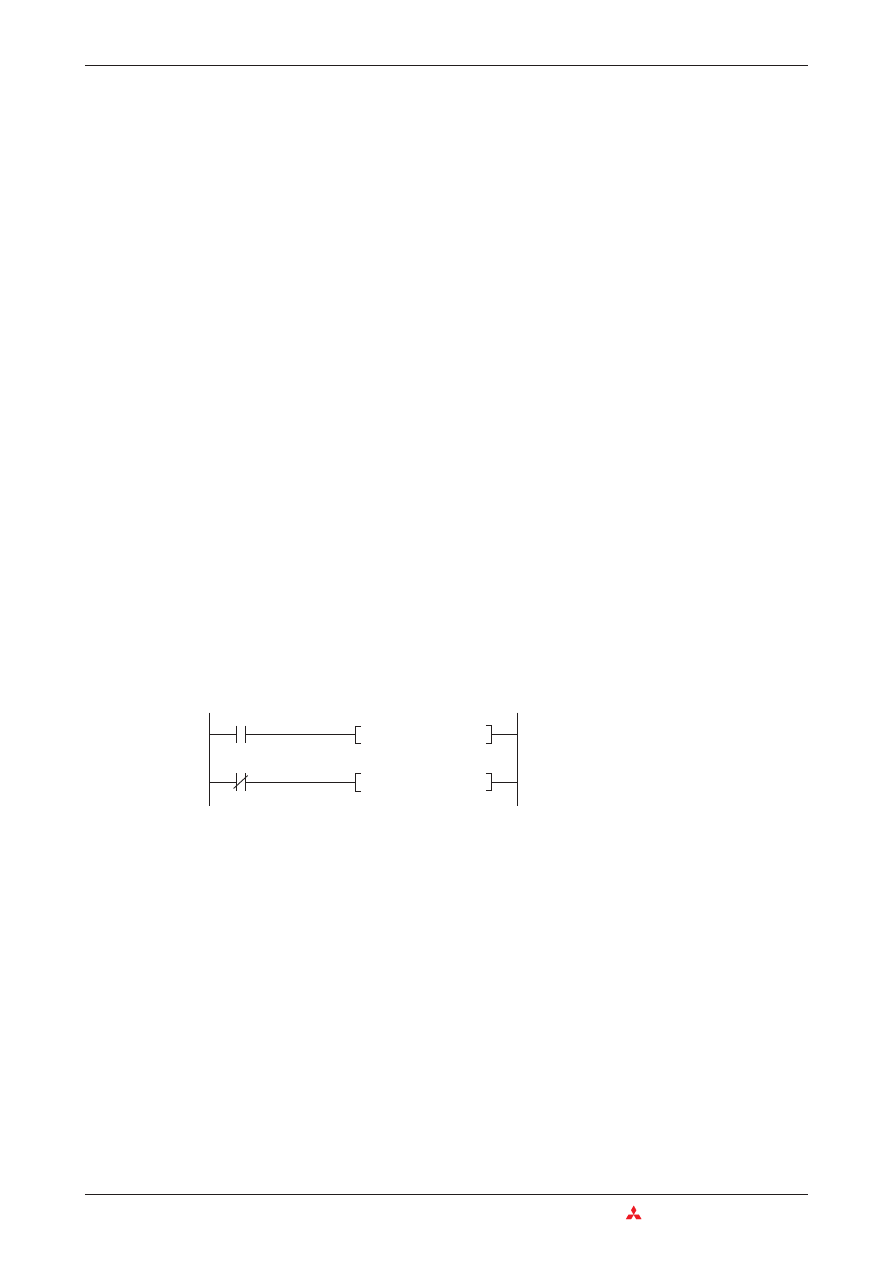
5.4
Instrukcje matematyczne
Wszystkie sterowniki rodziny MELSEC FX mogą wykonać wszystkie cztery działania arytmetyczne,
jak dodawanie, odejmowanie, mnożenie i dzielenie liczb całkowitych (liczb nie w formacie zmien-
noprzecinkowym). Instrukcje te opisano w niniejszym dziale.
Jednostki centralne sterowników z serii FX2N, FX2NC i FX3U mogą również przetwarzać liczby w for-
macie zmiennoprzecinkowym. Jest to robione za pomocą specjalnych instrukcji, które są
szczegółowo udokumentowane w Podręczniku Programowania serii MELSEC FX.
Po każdym dodawaniu lub odejmowaniu należy sprawdzić, czy wynik jest 0 lub czy przekroczył
zakres dopuszczalnych wartości. W tym celu należy użyć instrukcji do sprawdzenia stanu wymien-
ionych niżej specjalnych przekaźników.
쎲 M8020
Ten specjalny przekaźnik zostaje ustawiony w stan "1", jeśli wynik dodawania lub odejmowania
wynosi 0.
쎲 M8021
Specjalny przekaźnik M8021 zostaje ustawiony w stan "1", jeśli wynik dodawania lub odejmo-
wania jest mniejszy od 32 767 (operacja 16-bitowa) lub od -2 147 483 648 (operacja 32-bitowa).
쎲 M8022
Specjalny przekaźnik M8022 zostaje ustawiony w stan "1", jeśli wynik dodawania lub odejmo-
wania jest większy od +32 767 (operacja 16-bitowa) lub od +2 147 483 647 (operacja
32-bitowa).
Wymienione przekaźniki specjalne mogą być używane jako znaczniki zezwolenia, do kontynuow-
ania dodatkowych operacji matematycznych. W następnym przykładzie, wynik operacji odejm-
owania w D2 zostaje użyty jako dzielnik. Ponieważ dzielenie przez zero nie jest możliwe i powoduje
błąd, dzielenie wykonywane jest tylko wtedy, gdy dzielnik nie jest równy zero.
5 – 20
MITSUBISHI ELECTRIC
Instrukcje matematyczne
Programowanie zaawansowane
SUB D0 D1 D2
M8000
DIV D3 D2 D5
M8020
8
0
Schemat drabinkowy
Lista instrukcji
0 LD
M8000
1 SUB
D0
D1
D2
8 LDI
M8020
9 DIV
D3
D2
D5
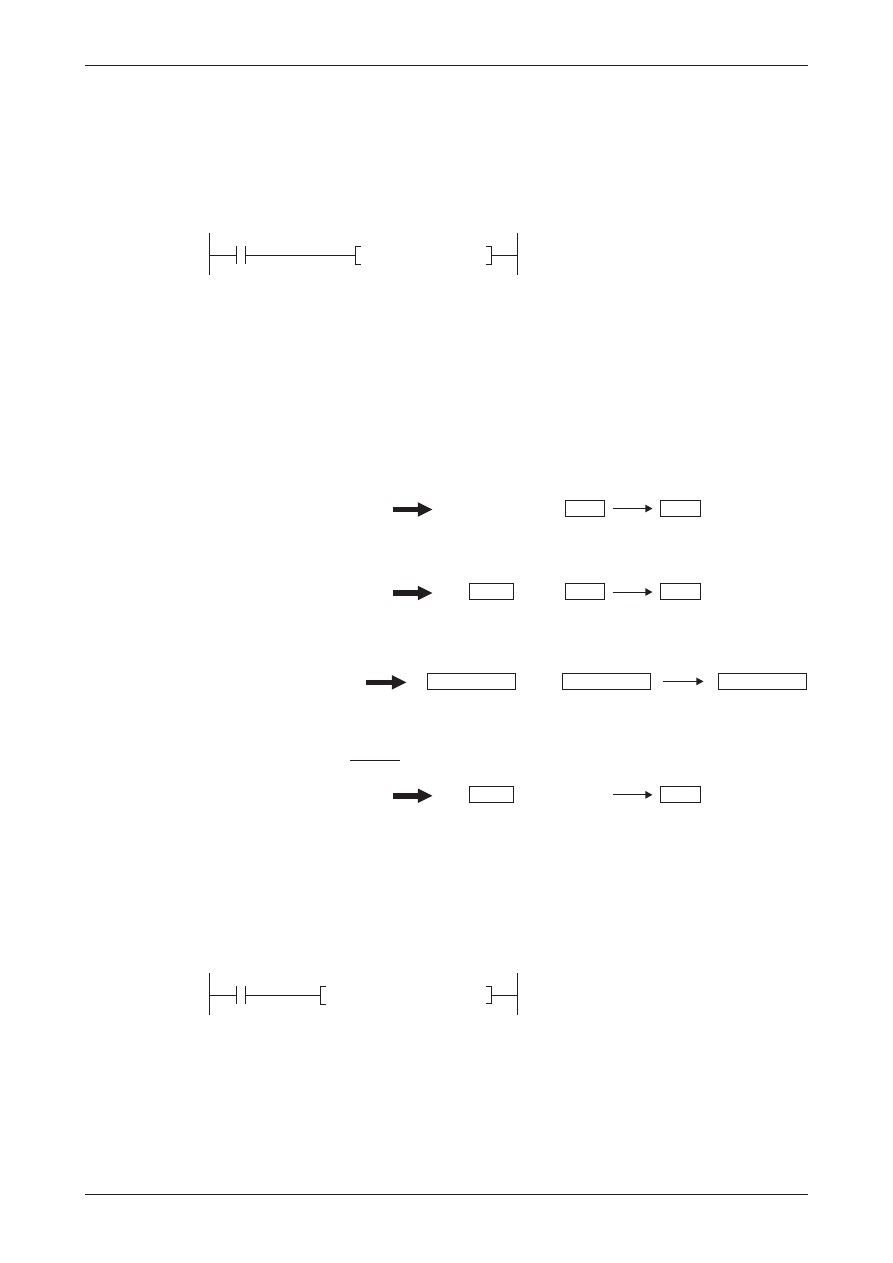
5.4.1
Dodawanie
Instrukcja ADD oblicza sumę dwóch 16-bitowych lub 32-bitowych wartości, a wynik wpisuje do
innego urządzenia.
��� Urządzenie z pierwszą wartością źródłową lub stała
��� Urządzenie z drugą wartością źródłową lub stała
��� Urządzenie, w którym przechowywany jest wynik dodawania
Powyższy przykład dodaje zawartość D0 do D1 oraz zapisuje wynik do D2.
Przykłady
Dodanie liczby 1000 do zawartości rejestru danych D100:
Znaki wartości brane są pod uwagę przez instrukcję ADD:
Można również dodawać 32-bitowe wartości, poprzedzając instrukcję ADD znakiem "D" (DADD):
Jeśli zachodzi taka potrzeba, można również zapisać wynik do jednego z urządzeń źródłowych. Jeśli
jednak zostanie to zrobione, należy pamiętać, że jeżeli instrukcja ADD wykonywana jest cyklicznie,
wynik ulegnie zmianie w każdym cyklu programu!
Instrukcja ADD może być również wykonywana w trybie wyzwalanym impulsowo. W ten sposób
jest to wykonywane tylko wtedy, gdy stan sygnału warunku wejściowego zmieni się z "0" na "1".
Używając tego trybu, należy dodać do instrukcji ADD przyrostek "P" (ADDP, DADDP).
W kolejnym przykładzie, do zawartości D47 dodawna jest jednokrotnie stała wartość 27. Operacja
wykonywana jest w tym cyklu programu, w którym stan przekaźnika M47 zmienia stan z "0" na "1".
Podręcznik dla początkujących
5 – 21
Programowanie zaawansowane
Instrukcje matematyczne
ADD D0 D1 D2
0
Schemat drabinkowy
Lista instrukcji
0 ADD
D0
D1
D2
��� ���
���
���
���
���
1000
ADD K1000 D100 D102
53
+
D 100
D 102
1053
5
ADD D10 D11 D12
-8
D 10
+
D 11
D 12
-3
65238
DADD D0 D2 D4
D 0
+
D 1
27643
D 2
D 3
92881
D 4
D 5
18
ADD D0 K25 D0
25
D 0
+
D 0
43
ADDP D47 K27 D51
M47
0
Schemat drabinkowy
Lista instrukcji
0 LD
M47
1 ADDP
D47
K27
D51
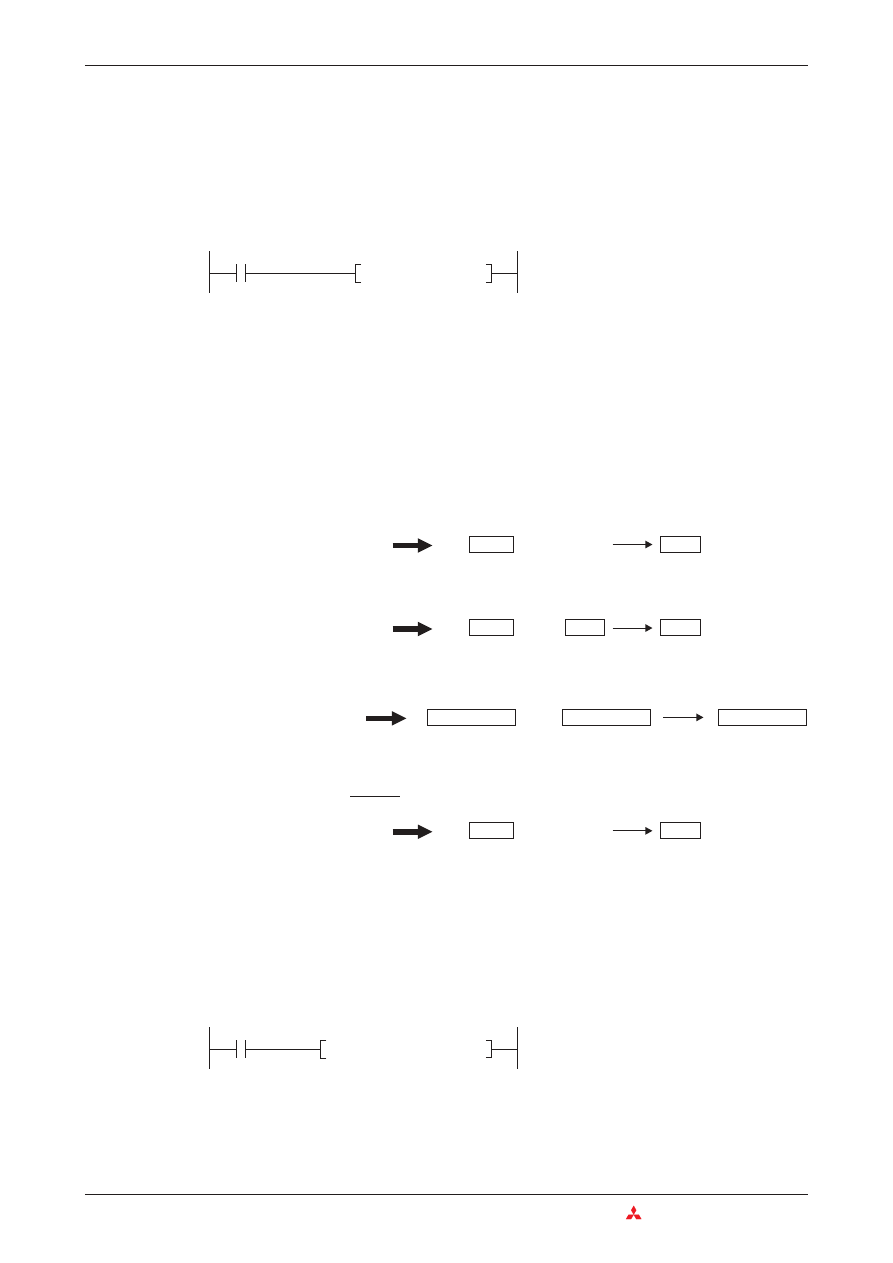
5.4.2
Odejmowanie
Instrukcja SUB oblicza różnicę pomiędzy dwoma wartościami cyfrowymi (zawartością urządzeń
16-bitowych lub 32-bitowych, lub pomiędzy stałymi). Wynik odejmowania zapisywany jest do trze-
ciego urządzenia.
��� Odjemna (odjemnik odejmowany jest od tej wartości)
��� Odjemnik (wartość ta odejmowana jest od odjemnej)
��� Różnica (wynik odejmowania)
W powyższym przykładzie, zawartość D1 odejmowana jest od zawartości D0, a różnica zapisywana
jest do D2.
Przykłady
Odejmuje stałą 100 od zawartości rejestru danych D11 i wpisuje wynik do D101:
Znaki wartości brane są pod uwagę przez instrukcję SUB:
Można również odjąć wartości 32-bitowe, poprzedzając instrukcję SUB znakiem "D".
Jeśli zachodzi taka potrzeba, można również zapisać wynik do jednego z urządzeń źródłowych. Jeśli
jednak zostanie to zrobione, należy pamiętać, że jeżeli instrukcja SUB wykonywana jest cyklicznie,
wynik ulegnie zmianie w każdym cyklu programu!
Instrukcja SUB może być również wykonywana w trybie wyzwalanym impulsowo. W ten sposób jest
to wykonywane tylko wtedy, gdy stan sygnału warunku wejściowego zmieni się z "0" na "1".
Używając tego trybu, należy dodać do instrukcji SUB przyrostek "P" (SUBP, DSUBP).
W kolejnym przykładzie, zawartość D394 odejmowana jest tylko jednokrotnie od zawartości D50.
Operacja wykonywana jest w tym cyklu programu, w którym stan przekaźnika M50 zmienia stan z
"0" na "1".
5 – 22
MITSUBISHI ELECTRIC
Instrukcje matematyczne
Programowanie zaawansowane
SUB D0 D1 D2
0
Schemat drabinkowy
Lista instrukcji
0 SUB
D0
D1
D2
��� ���
���
���
���
���
247
SUB D100 K100 D101
100
D 100
–
D 101
147
5
SUB D10 D11 D12
-8
D 10
–
D 11
D 12
13
65238
DSUB D0 D2 D4
D 0
–
D 1
27643
D 2
D 3
D 4
D 5
37595
197
SUB D0 K25 D0
25
D 0
–
D 0
172
SUBP D50 D394 D51
M50
0
Schemat drabinkowy
Lista instrukcji
0 LD
M50
1 SUBP
D50
D394
D51
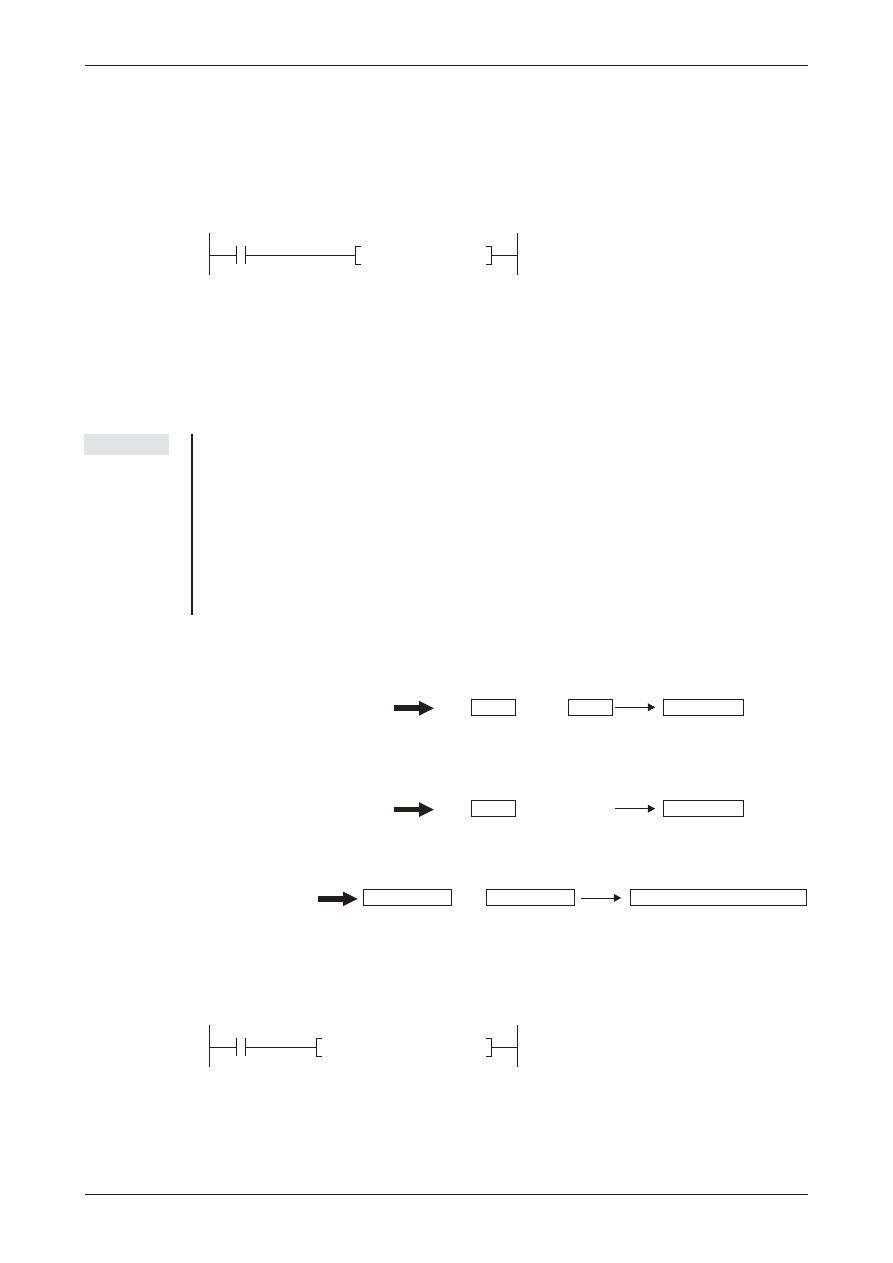
5.4.3
Mnożenie
Instrukcje sterowników FX MUL, mnożą dwie wartości 16-bitowe lub 32-bitowe, a wynik zapisują do
trzeciego urządzenia.
��� Mnożna
��� Mnożnik
��� Urządzenie, w którym przechowywany jest wynik mnożenia
Powyższy przykład mnoży zawartość D0 i D1 oraz zapisuje wynik do D2.
UWAGA
Gdy mnożone są dwie 16-bitowe wartości, wynik może bardzo łatwo przekroczyć zakres 16 bi-
tów. Ze względu na to wynik mnożenia zapisywany jest zawsze do dwóch kolejnych 16-bitowych
urządzeń (jako 32-bitowe podwójne słowo).
Gdy mnożone są dwie 32-bitowe wartości, wynik zapisywany jest do czterech kolejnych, 16-bi-
towych urządzeń (64 bity, dwa słowa podwójnej długości).
Podczas programowania zawsze należy brać pod uwagę wielkość zakresu tych urządzeń. Należy
również uważać, żeby nie doprowadzić do nałożenia się zakresów przez wykorzystywanie
urządzeń w zakresie do którego zapisywany jest wynik mnożenia.
Przykłady
Mnożenie zawartości D0 i D1 oraz zapamiętanie wynku mnożenia w D3 i D2:
Znaki wartości brane są pod uwagę przez instrukcję MUL. W tym przykładzie wartość w D10
mnożona jest przez wartość stałą -5:
Można również mnożyć 32-bitowe wartości, poprzedzając instrukcję MUL znakiem "D" (DMUL):
Instrukcja MUL może być również wykonywana w trybie wyzwalanym impulsowo, przez dodanie
do instrukcji MUL przyrostka "P" (MULP, DMULP). Kolejne mnożenie wykonywane jest tylko wtedy,
gdy wejście X24 przełączy stan z "0" na "1":
Podręcznik dla początkujących
5 – 23
Programowanie zaawansowane
Instrukcje matematyczne
MUL D0 D1 D2
0
Schemat drabinkowy
Lista instrukcji
0 MUL
D0
D1
D2
��� ���
���
���
���
���
1805
MUL D0 D1 D2
481
D 0
x
D 3
868205
D 1
D 2
8
MUL D10 K-5 D20
-5
D 10
x
D 21
-40
D 20
65238
DMUL D0 D2 D4
D 0
x
D 1
27643
D 2
D 3
1803374034
D 6
D 7
D 5
D 4
MULP D25 D300 D26
X24
0
Schemat drabinkowy
Lista instrukcji
0 LD
X24
1 MULP
D25
D300
D26
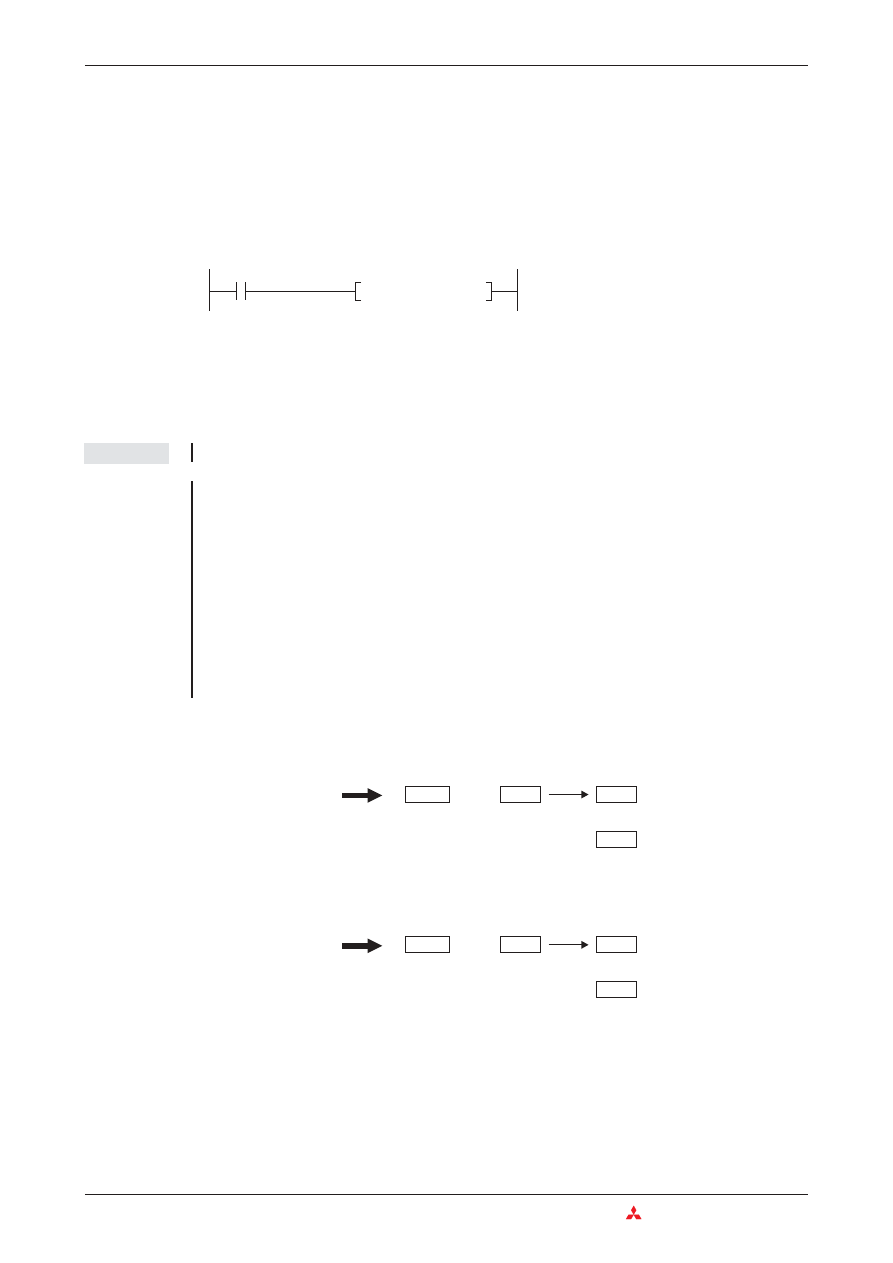
5.4.4
Dzielenie
Instrukcja DIV rodziny MELSEC FX dzieli jedną liczbę przez drugą (zawartość dwóch 16-bitowych lub
32-bitowych urządzeń lub przez stałą). Jest to operacja na liczbach całkowitych i nie może
przetwarzać wartości zmiennoprzecinkowych. Wynik jest zawsze całkowity i reszta z dzielenia
zapisywana jest oddzielnie.
��� Dzielna
��� Dzielnik
��� Iloraz (wynik dzielenia, Dzielna ¸ Dzielnik = Iloraz)
UWAGI
Dzielnik nie może nigdy być 0. Dzielenie przez 0 nie jest możliwe i wygeneruje błąd.
Gdy dzielone są dwie 16-bitowe wartości, iloraz zapisywany jest do jednego 16-bitowego
urządzenia, natomiast reszta z dzielenia wpisywana jest do następnego urządzenia. Oznacza to,
że wynik dzielenia zawsze wymaga dwóch kolejnych 16-bitowych urządzeń (=32 bity).
Gdy dzielone są dwie 32-bitowe wartości, iloraz zapisywany jest do dwóch 16-bitowych
urządzeń, natomiast reszta z dzielenia wpisywana jest do następnych dwóch 16-bitowych
urządzeń. Oznacza to, że do zapisania wyniku 32-bitowego dzielenia wymagane są cztery kolejne
16-bitowe urządzenia.
Podczas programowania zawsze należy brać pod uwagę wielkość zakresu tych urządzeń. Należy
również uważać, żeby nie doprowadzić do nałożenia się zakresów przez wykorzystywanie
urządzeń w zakresie, do którego zapisywane są wyniki operacji.
Przykłady
Dzielenie zawartości D0 przez zawartość D1 i zapisanie wyniku do D2 i D3:
Znaki wartości brane są pod uwagę przez instrukcję DIV. W tym przykładzie, wartość licznika C0
dzielona jest przez wartość w D10:
5 – 24
MITSUBISHI ELECTRIC
Instrukcje matematyczne
Programowanie zaawansowane
DIV D0 D1 D2
0
Schemat drabinkowy
Lista instrukcji
0 DIV
D0
D1
D2
��� ���
���
���
���
���
40
DIV D0 D1 D2
6
D 0
쐦
D 1
D 2
6
D 3
4
Iloraz (6 x 6 = 36)
Reszta (40 - 36 = 4)
36
DIV C0 D10 D200
-5
C 0
쐦
D 10
D 200
-7
D 201
1
Iloraz
Reszta
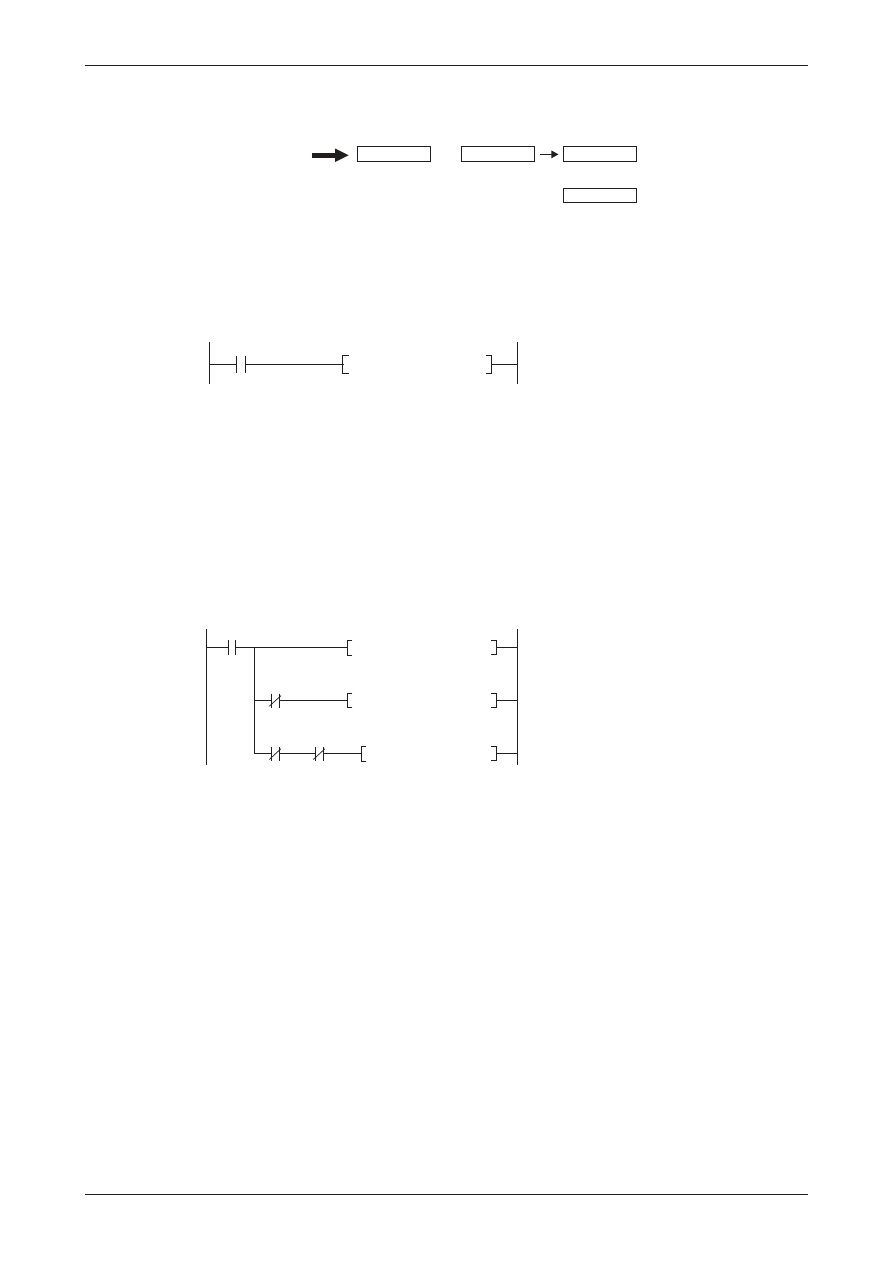
Dzielenie 32-bitowych wartości:
Dodanie przyrostka "P" do instrukcji DIV, powoduje wykonanie tej instrukcji w trybie wyzwalania
impulsowego (DIV ->> DIVP, DDIVPL ->> DMULP). W następnym przykładzie, wartość licznika C12
dzielona jest przez 4 w tym cyklu programu, w którym zostanie załączone wejście X30:
5.4.5
Łączenie instrukcji matematycznych
W realnym życiu, przy wszystkim, co jest do wykonania, jedno obliczenie jest rzadkością. Sterowniki
FX pozwalają na łączenie instrukcji matematycznych w celu rozwiązywania bardziej złożonych
obliczeń. Zależnie od natury obliczenia może zajść potrzeba użycia dodatkowych urządzeń do prze-
chowania pośrednich wyników.
Następny przykład pokazuje, jak można obliczyć sumę wartości w rejestrach danych D101, D102 i
D103 i następnie pomnożyć wynik przez czynnik 4:
–
Najpierw zawartości rejestrów D101 i D102 są dodawane, a wynik zapisywany jest do D200.
–
Jeśli (i tylko jeśli) suma D101 i D102 nie przekroczy dozwolonego zakresu, jest następnie doda-
wana do wartości w D103.
–
Jeśli suma D101 do D103 nie przekroczy dozwolonego zakresu, jest mnożona przez czynnik 4,
a wynik zapisywany jest do D104 i D105.
Podręcznik dla początkujących
5 – 25
Programowanie zaawansowane
Instrukcje matematyczne
65238
DDIV D0 D2 D4
27643
D1
쐦
2
9952
D0
D3
D2
D5
D4
D7
D6
Iloraz
Reszta
DIVP C12 K4 D12
X30
0
Schemat drabinkowy
Lista instrukcji
0 LD
X30
1 DIVP
C12
K4
D12
ADD D101 D102 D200
M101
ADD D200 D103 D200
M8022
MUL D200 K4 D104
M8021 M8022
0
Schemat drabinkowy
Lista instrukcji
0
LD
M101
1
ADD D101
D102
D200
8
MPS
9
ANI
M8022
10 ADD D200
D103
D200
17 MPP
18 ANI
M8021
19 ANI
M8022
20 MUL D200
K4
D104

5 – 26
MITSUBISHI ELECTRIC
Instrukcje matematyczne
Programowanie zaawansowane
6
Możliwości rozszerzania
6.1
Wstęp
Za pomocą modułów rozszerzających i specjalnych modułów funkcyjnych można rozszerzyć jedn-
ostkę centralną z serii MELSC FX.
Moduły te dzielą się na trzy kategorie:
쎲 Moduły, które zajmują cyfrowe wejścia i wyjścia (montowane z prawej strony sterownika). Tutaj
zawarte są cyfrowe roszerzenia modułowe i kompaktowe oraz specjalne moduły funkcyjne.
쎲 Moduły, które nie zajmują cyfrowych wejść i wyjść (montowane z lewej strony sterownika).
쎲 Interfejsy i odaptory komunikacyjne, które nie zajmują cyfrowych wejść i wyjść (montowane
bezpośrednio w jednostce sterownika).
6.2
Dostępne moduły
6.2.1
Moduły służące do dodawania cyfrowych wejść i wyjść
Do zwiększania liczby wejść i wyjść cyfrowych w jednostkach centralnych MELSEC FX
1N
/FX
2N
/FX
2NC
i FX
3U
, służy szeroka gama różnych modułowych i kompaktowych jednostek rozszerzających.
Dodatkowo cyfrowe wejścia i wyjścia mogą zostać dodane do sterowników serii FX
1S
, FX
1N
i FX
3U
w postaci specjalnych adaptorów rozszerzających, które montowane są bezpośrednio w jednostce
sterownika. Adaptory te są szczególnie dobrym wyborem, gdy potrzebnych jest kilka dodatkowych
wejść lub wyjść, i/lub jeśli nie ma wystarczająco dużo miejsca do zamontowania modułów rozszer-
zających z boku sterownika.
Modułowe jednostki rozszerzające zawierają tylko cyfrowe wejścia i wyjścia, jednak nie mają
własnego zasilacza. Kompaktowe jednostki rozszerzające mają większą liczbę wejść/wyjść oraz
wbudowaną jednostkę zasilacza magistrali systemowej oraz cyfrowych wyjść.
Dostępne jednostki centralne i jednostki rozszerzające mogą być mieszane i dobierane na wiele
różnych sposobów, umożliwiając konfigurację systemu sterowania dokładnie do potrzeb naszej
aplikacji.
6.2.2
Moduły wejść/wyjść analogowych
Moduły wejść/wyjść analogowych przetwarzają analogowe sygnały wejściowe na wartości
cyfrowe, lub cyfrowe sygnały wejściowe na sygnały analogowe.
Dostępnych jest dużo modułów z sygnałami prądowo/napięciowymi oraz do monitorowania tem-
peratury, z bezpośrednim połączeniem do rezystorów Pt100 lub termoelementów. Wprowadzenie
do przetwarzania sygnałów analogowych, przedstawione zostało w rozdziale 7.
Podręcznik dla początkujących
6 – 1
Możliwości rozszerzania
Wstęp

6.2.3
Moduły komunikacyjne
Mitsubishi Electric produkuje cały szereg modułów interfejsów i adaptorów z portami szeregowymi
(RS-232, RS-422 i RS-485), do podłączenia urządzeń peryferyjnych i innych sterowników.
Do włączenia sterowników MELSEC FX1N, FX2N, FX2NC i FX3U do różnych siec jest dostępnych
wiele specjalnych modułów komunikacyjnych.
Powszechnie dostępne są moduły interfejsów sieciowych do Profibus/DP, AS-interface, DeviceNet,
CANopen, CC-Link i firmowych sieci Mitsubishi.
6.2.4
Moduły pozycjonujące
Wewnętrzne, szybkie liczniki sterowników MELSEC FX można uzupełnić dodatkowymi,
zewnętrznymi modułami sprzętowych liczników szybkich. Można ich użyć do podłączenia takich
urządzeń, jak przyrostowe przetworniki obrotowe, natomiast moduły pozycjonujące do systemów
napędowych serwo i silników krokowych.
Za pomocą modułów pozycjonujących rodziny MELSEC FX z wyjściem impulsowym, można progra-
mować precyzyjne aplikacje pozycjonujące. Moduły te mogą być używane do sterowania silników
krokowych oraz serwonapędów.
6.2.5
Panele sterujące i wyświetlające HMI
Panele sterujące i wyświetlające Mitsubishi Electric są użytecznymi i efektywnymi interfejsami
pomiędzy człowiekiem i maszyną (HMI) i współpracują z serią MELSEC FX. Jednostki sterujące HMI
powodują, że funkcje sterowanych systemów stają się przejrzyste i zrozumiałe.
Wszystkie dostępne jednostki pozwalają na monitorowanie i edytowanie wszystkich parametrów
związanych z PLC , takich, jak wartości bieżące i nastawy, liczniki, rejestry danych i instrukcje
sekwencyjne.
Jednostki HMI dostępne są w obydwu wersjach - tekstowej i opartej na wyświetlaczu graficznym. W
pełni programowalne przyciski funkcyjne i ekrany dotykowe, czynią te jednostki jeszcze łatwiejsze
w użyciu. Jednostki te są programowane i konfigurowane za pomocą użytecznych programów,
opartych o komputer PC i system Windows®.
Jednostki HMI komunikują się z PLC FX poprzez interfejs programujący, i podłączone są bezpośr-
ednio za pomocą standardowego kabla. Do podłączenia jednostek HMI z PLC, nie są wymagane
dodatkowe moduły.
6 – 2
MITSUBISHI ELECTRIC
Dostępne moduły
Możliwości rozszerzania
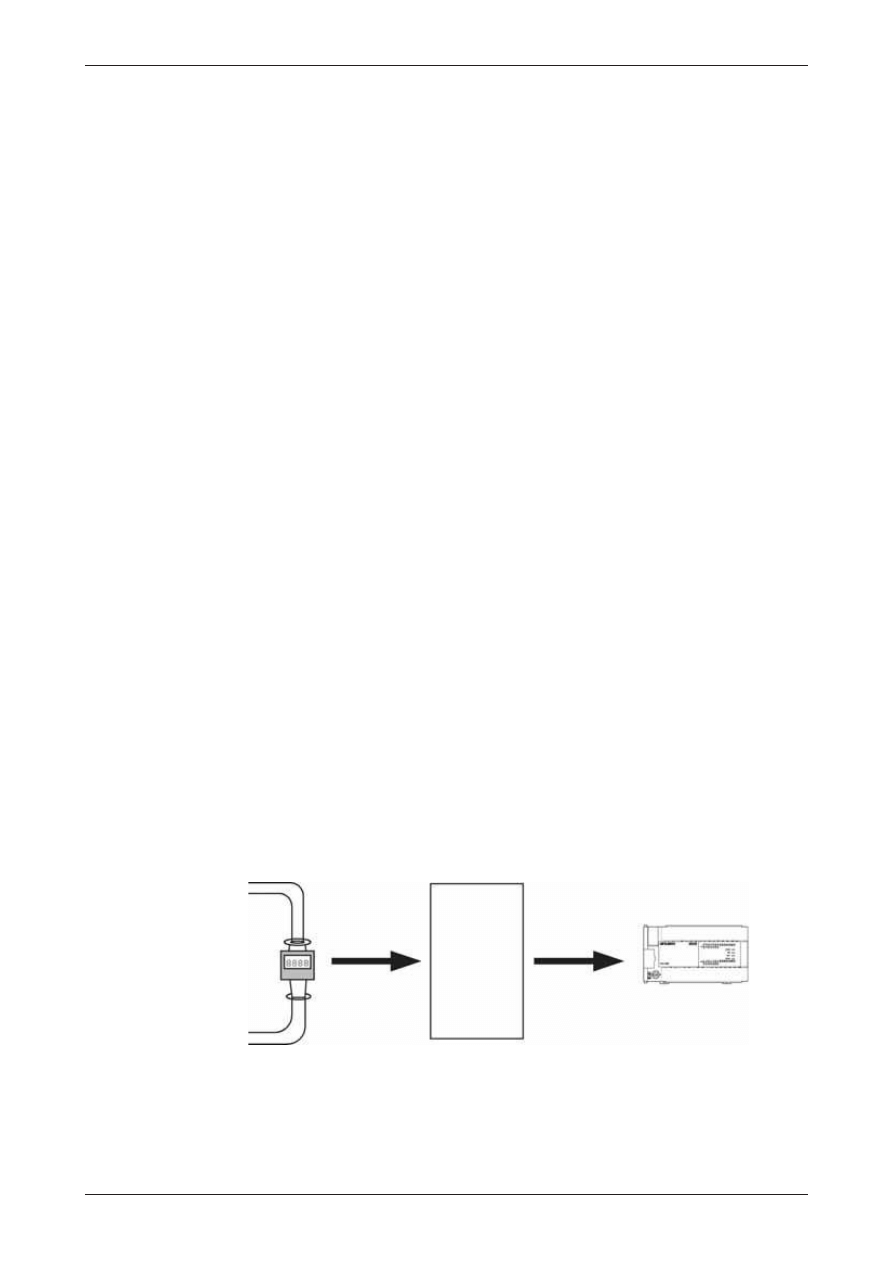
7
Przetwarzanie wartości analogowych
7.1
Moduły analogowe
Przy automatyzowaniu procesów często zachodzi potrzeba dostępu lub sterowania wartościami
analogowymi, takimi jak temperatura, ciśnienie czy poziom napełnienia. Bez dodatkowych
modułów jednostka centralna rodziny MELSEC FX może przetwarzać tylko wejściowe i wyjściowe
cyfrowe sygnały (tzn. dane typu ON/OFF). W ten sposób do wprowadzania i wyprowadzania
sygnałów analogowych, wymagane są dodatkowe moduły analogowe.
Zasadniczo są dwa różne rodzaje modułów analogowych:
쎲 Moduły z wejściami analogowymi, i
쎲 moduły z wyjściami analogowymi.
Moduły z wejściami analogowymi mogą przyjmować prąd, napięcie i wartości temperatury.
Moduły z wyjściami analogowymi przesyłają sygnały prądowe lub napięciowe do wyjść modułu.
Dodatkowo są również moduły mieszane, które mogą przyjmować i wyprowadzać sygnały
analogowe.
Moduły z wejściami analogowymi
Moduły z wejściami analogowym przetwarzają zmierzoną wartość analogową (np. 10 V) na wartość
cyfrową (np. 4000), która może być następnie przetwarzana przez PLC. Proces przetwarzania znany
jest jako przetwarzanie analogowo/cyfrowe lub w skrócie przetwarzanie A/C.
Temperatura może być przyjmowana bezpośrednio przez moduły analogowe rodziny MELSEC FX,
lecz inne fizyczne wartości, jak ciśnienie lub prędkość przepływu, muszą zostać najpierw prze-
kształcone na odpowiednie wartości prądu lub napięcia, zanim zostaną przetworzone na wartości
cyfrowe, przydatne do dalszego przetwarzania przez PLC. Przekształcanie wykonywane jest przez
czujniki, których sygnał wyjściowy zawiera się w standardowym przedziale (przykładowo 0 do 10 V
lub 4 do 20 mA). Pomiar sygnału prądowego ma tę przewagę, że wartość sygnału nie jest fałszowana
przez długość kabli lub oporności styków.
Następujący przykład rejestracji wartości analogowej, pokazuje rozwiązanie pomiaru przepływu z
użyciem PLC serii MELSEC FX
3U
.
Podręcznik dla początkujących
7 – 1
Przetwarzanie wartości analogowych
Moduły analogowe
Urządzenie do pomiaru przepływu z
wyjściem napięciowym lub prądowym
Napięcie lub
prąd
Moduł z
wejściem
analogowym
Wartość
cyfrowa
Przetwarzanie
analogowo/
cyfrowe
Jednostka centralna
z serii FX3U
np. 5 V
lub 12 mA
np. 2000
np. 50 l/sek.
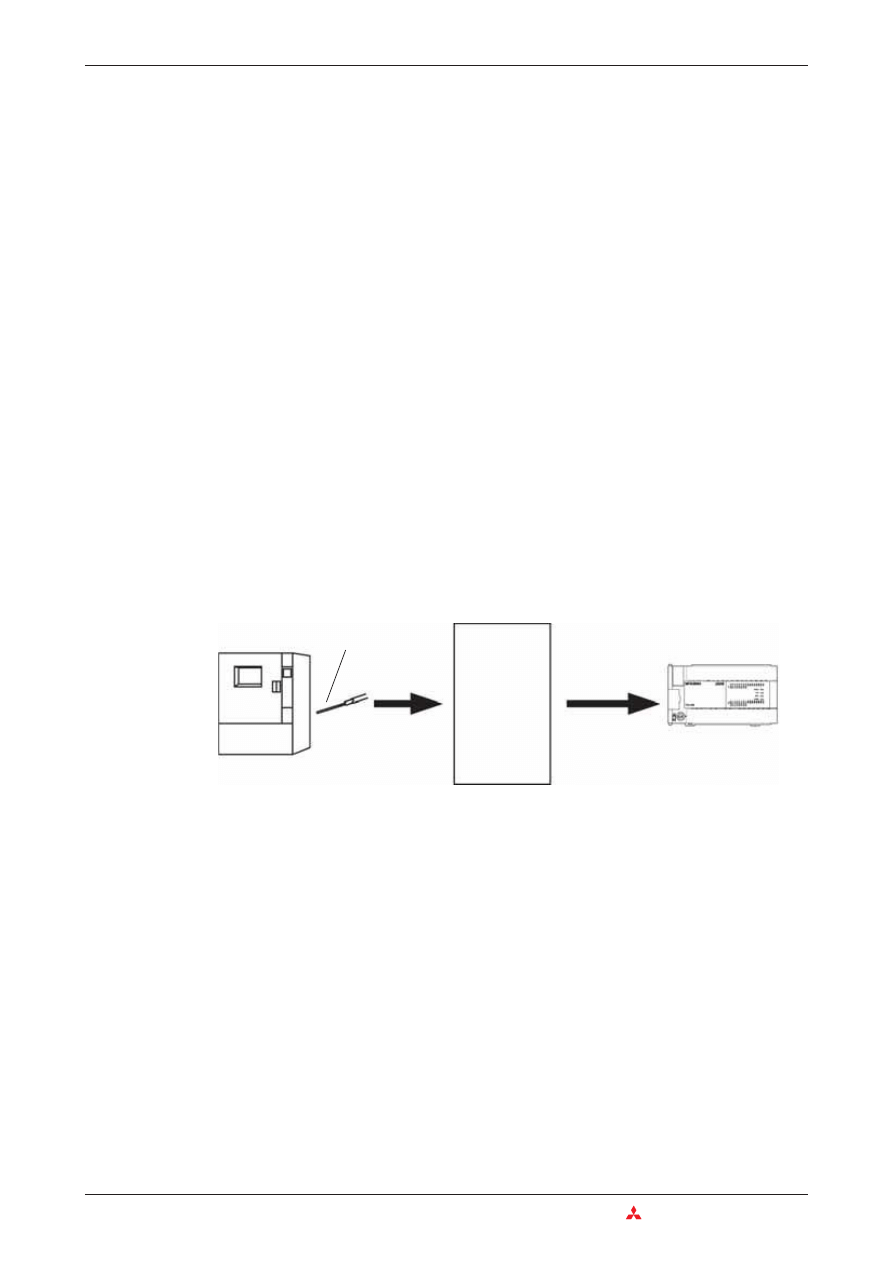
Moduły z wejściami analogowymi do rejestracji temperatury
Wartości temperatury mogą być rejestrowane za pomocą czujników, wykonanych w dwóch
różnych technologiach: jako termometry oporowe Pt100 i termoelementy.
쎲 Termometr oporowy Pt100
Urządzenia te mierzą oporność elementu platynowego, która zwiększa się wraz z temperaturą.
Przy temperaturze 0°C element ma rezystancję100°C (stąd nazwa Pt100). Czujniki oporowe
podłączane są metodą trójprzewodową, która zapewnia, że rezystancja kabla łączącego nie
wpływa na wynik pomiaru.
Maksymalny zakres pomiarowy termometrami oporowymi Pt100 wynosi od -200°C to +600°C,
lecz w praktyce zależy to również od możliwości użytego modułu pomiarowego.
쎲 Termoelementy
Dobrą stroną tych elementów do pomiaru temperatury jest fakt, że napięcie generowane jest
wtedy, gdy do elementu zrobionego z dwóch różnych metali, doprowadzone zostanie ciepło.
W ten sposób metoda ta mierzy temperaturę z pomocą sygnału napięciowego.
Są różne rodzaje termoelementów. Różnią się wartością siły termoelektrycznej (s.t.e.) i zakre-
sem temperatur, które mogą mierzyć. Kombinacja użytych materiałów jest wystandaryzowana i
identyfikowana przez kod typu. Typy J i K są powszechnie używane. Termoelement typu J
używa połączenie żelaza (Fe) ze stopem miedź/nikiel (CuNi), termoelement typu K używa kom-
binacji NiCr i Ni. Dodatkowo do ich podstawowej konstrukcji, termoelementy różnią się również
zakresem temperatury, który mogą mierzyć.
Termoelementy mogą być używane do pomiaru temperatury od -200°C do +1 200°C.
Przykład pomiaru temperatury:
Moduły z wyjściami analogowymi.
Moduły z wyjściami analogowymi przekształcają wartość cyfrową z jednostki centralnej PLC na
sygnał analogowy napięciowy lub prądowy, które mogą być użyte do sterowania zewnętrznym
urządzeniem (przetwarzanie cyfrowo/analogowe lub przetwarzanie C/A).
Wyjściowe sygnały analogowe wytwarzane przez rodzinę MELSEC FX, używają standardowych
zakresów przemysłowych 0–10V i 4–20mA.
Przykład na następnej stronie pokazuje sygnał analogowy, który używany jest jako wartość zadana
dla napędu, opartego na przetwornicy częstotliwości. W tym zastosowaniu sygnał prądowy lub
napięciowy z PLC reguluje prędkość silnika podłączonego do przetwornicy częstotliwości.
7 – 2
MITSUBISHI ELECTRIC
Moduły analogowe
Przetwarzanie wartości analogowych
Temperatura
Wartość
cyfrowa
Moduł do
pomiaru
temperatury
Przetwarzanie
analogowo/
cyfrowe
Jednostka centralna
z rodziny FX
Sprzęt peryferyjny
Czujnik temperatury
np. 47 °C
np. 470
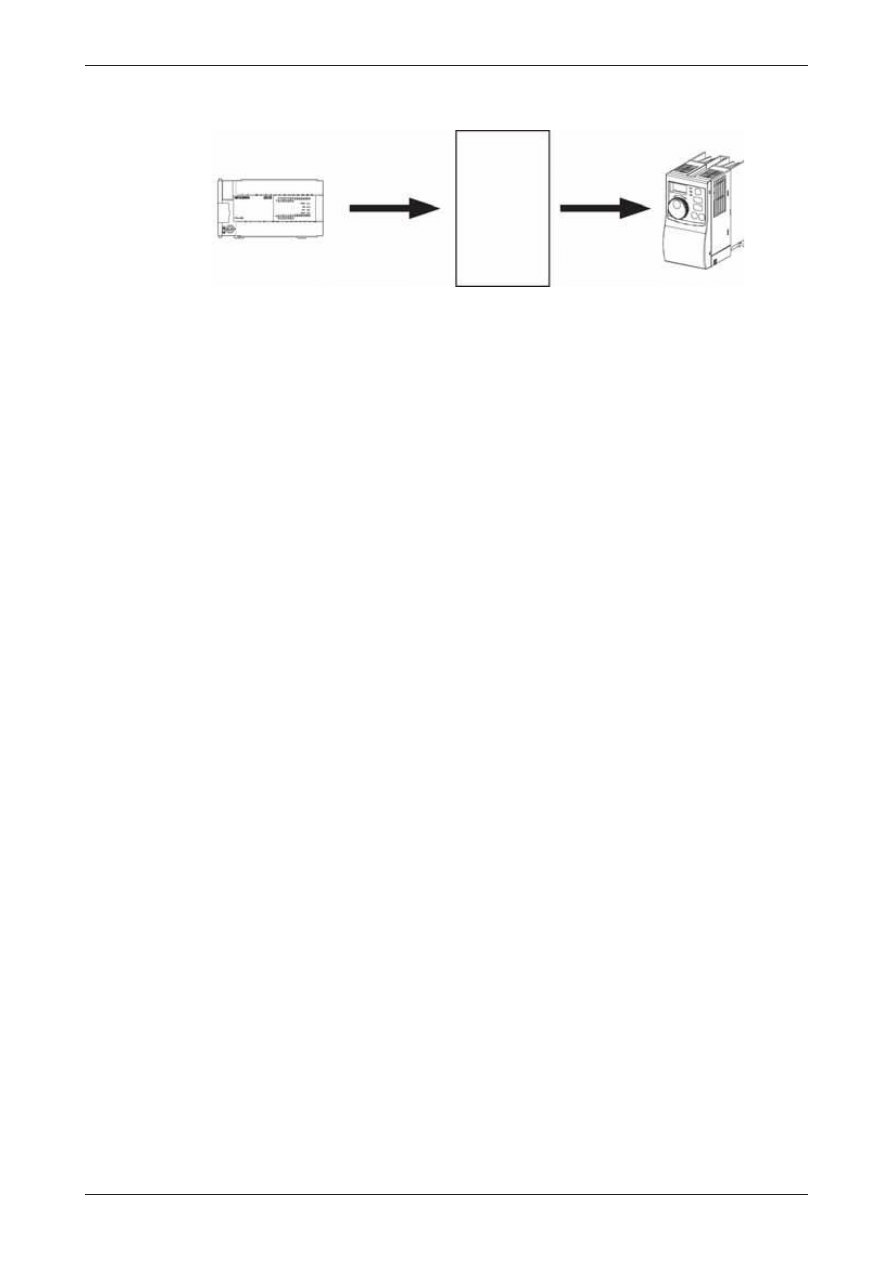
7.1.1
Kryteria wyboru modułów analogowych
W rodzinie MELSEC FX dostępna jest szeroka gama modułów analogowych i każde zadanie
związane z automatyzacją wymaga wyboru właściwego modułu. Główne kryteria wyboru są
następujące:
쎲 Kompatybilność z jednostką centralną PLC
Moduł analogowy musi być kompatybilny z aktualnie używaną jednostką centralną PLC. Na
przykład, nie można podłączyć modułów analogowych z serii FX3U, do jednostki centralnej serii
FX1N
쎲 Rozdzielczość
Rozdzielczość określa najmniejszą fizyczną wartość, którą można odczytać lub wyprowadzić
przez moduł analogowy.
W przypadku modułów wejściowych, rozdzielczość zdefiowana jest jako wejściowa zmiana na-
pięcia, prądu lub temperatury, która zwiększa lub zmniejsza o 1, wyjściową wartość cyfrową.
W przypadku modułów wyjściowych, rozdzielczość zdefiowana jest jako zmiana napięcia lub
prądu na wyjściu modułu, spowodowana zwiększeniem lub zmniejszeniem o 1 cyfrowej
wartości wejściowej.
Rozdzielczość ograniczona jest wewnętrzną konstrukcją modułu analogowego i zależy liczby
bitów wymaganych do zapisania wartości cyfrowej. Na przykład, jeśli napięcie 10 V przetwarza-
ne jest przez 12-bitowy przetwornik A/C, ten zakres napięcia dzielony jest na 4 096 kroków (212
= 4096, zob. dział 3.3). Rozdzielczość ta daje w wyniku 10V/4096 = 2,5mV.
쎲 Liczba analogowych wejść lub wyjść
Wejścia lub wyjścia modułów analogowych nazywane są również kanałami. Moduły z wejściami
analogowymi można wybrać spośród 2, 4 lub 8 kanałowych, zależnie od liczby wymaganych
kanałów. Należy zauważyć, że istnieje ograniczenie co do liczby specjalnych modułów funk-
cyjnych, któe mogą być podłączone do jednostki centralnej PLC (zob. dział 7.1.2). Jeśli wiado-
mo, że będzie istniała konieczność instalacji innych specjalnych modułów funkcyjnych, to le-
piej użyć jeden moduł z czterema wejściami analogowymi, niż dwa moduły z dwoma wejściami
każdy; pozwoli to na podłączenie większej ilości dodatkowych modułów.
Podręcznik dla początkujących
7 – 3
Przetwarzanie wartości analogowych
Moduły analogowe
Poziom sygnału prądowego lub
napięciowego z PLC, steruje
prędkością podłączonego silnika.
z. B. 5 V
oder 12 mA
Napięcie lub
prąd
Moduł z
wyjściem
analogowym
Wartość
cyfrowa
Przetwarzanie
cyfrowo/
analogowe
Jednostka
centralna z rodziny
FX
Przetwornica
np. 2000
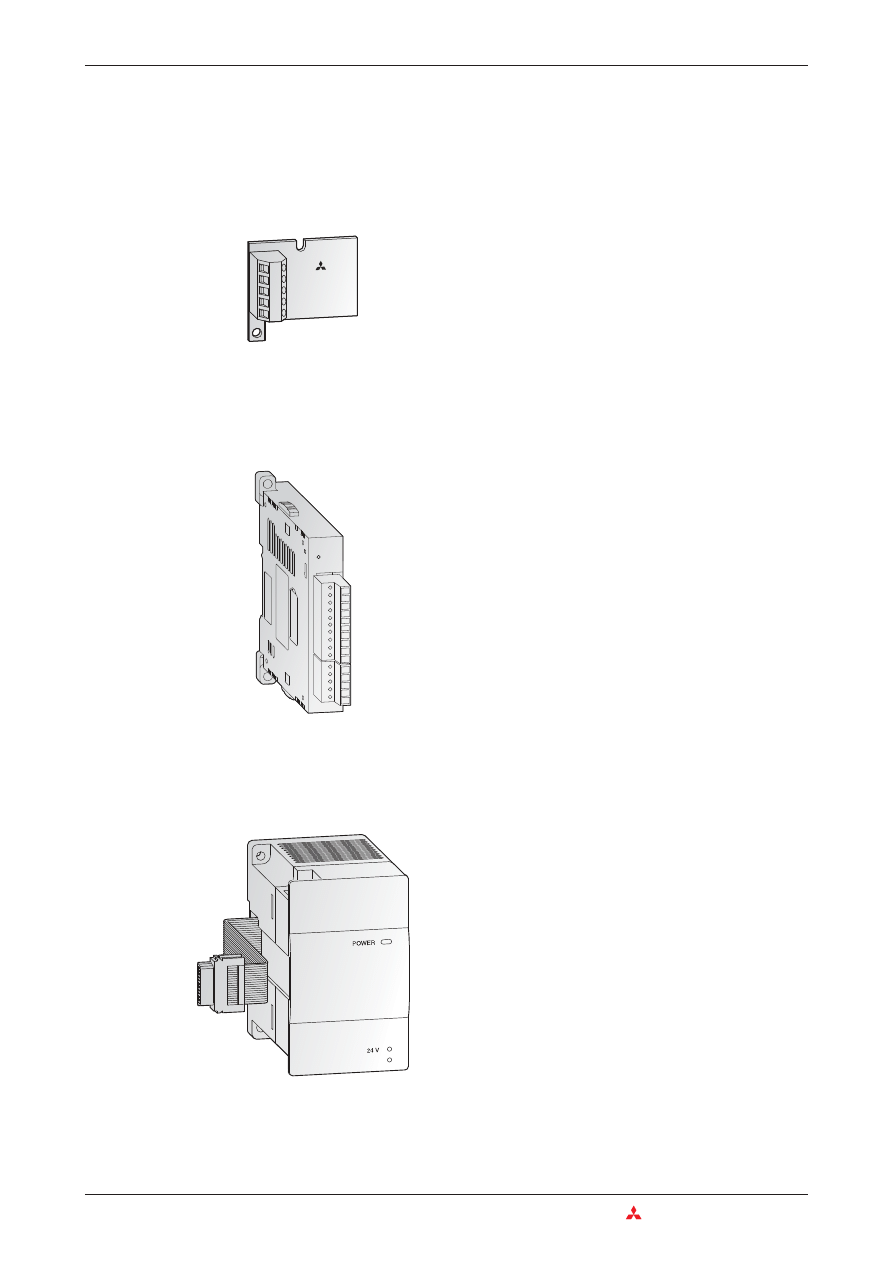
W rodzinie MELSEC FX dostępnych jest dużo różnych modułów analogowych.
Płytki adaptacyjne
Płytki adaptacyjne są małymi obwodami drukowanymi, które instalowane są bezpośrednio w ste-
rownikach FX1S lub FX1N, co oznacza, że nie zabierają dodatkowej przestrzeni w szafce sterującej.
Specjalny adaptor
Specjalne adaptory mogą być podłączone tylko z lewej strony jednostki centralnej serii MELSEC
FX3U. Można zainstalować maksymalnie cztery specjalne analogowe adaptory.
Specjalne moduły funkcyjne
Z prawej strony pojedynczej jednostki centralnej rodziny MELSEC FX można podłączyć do ośmiu
specjalnych modułów funkcyjnych.
7 – 4
MITSUBISHI ELECTRIC
Moduły analogowe
Przetwarzanie wartości analogowych
FX1N-2AD
•
BY0+
BY0-
BY1+
BY1-
Wartości cyfrowe wytwarzane przez sygnały przychodzące z
dwóch kanałów wejściowych adaptera wejściowego, wpisy-
wane są bezpośrednio do specjalnych rejestrów D8112 i
D8113, co szczególnie ułatwia ich przetwarzanie.
Wartość wyjściowa dla adaptora z wyjściem analogowym,
zapisywana jest przez program do specjalnego rejestru
D8114, a następnie przetwarzana przez adaptor i wysyłana
na wyjście.
Specjalne adaptory nie zajmują adresów wejść lub wyjść w
jednostce centralnej. Komunikują się bezpośrednio z jed-
nostką centralną, poprzez specjalne przekaźniki i rejestry. W
związku z tym w programie nie są potrzebne instrukcje do
komunikacji ze specjalnymi modułami funkcyjnymi (zob.
poniżej).
FX -4AD-TC
2N
A / D
Dodatkowo, oprócz modułów analogowych, dostępne spec-
jalne moduły funkcyjne zawierają moduły komunikacyjne,
moduły pozycjonujące i inne rodzaje. Każdy specjalny moduł
funkcyjny zajmuje w jednostce centralnej osiem punktów
wejściowych i osiem punktów wyjściowych. Komunikacja
pomiędzy specjalnym modułem funkcyjnym i jednostką
centralną PLC, prowadzona jest poprzez pamięć buforową
specjalnego modułu funkcyjnego, z pomocą instrukcji FROM
i TO (zob. dział 5.2.5).
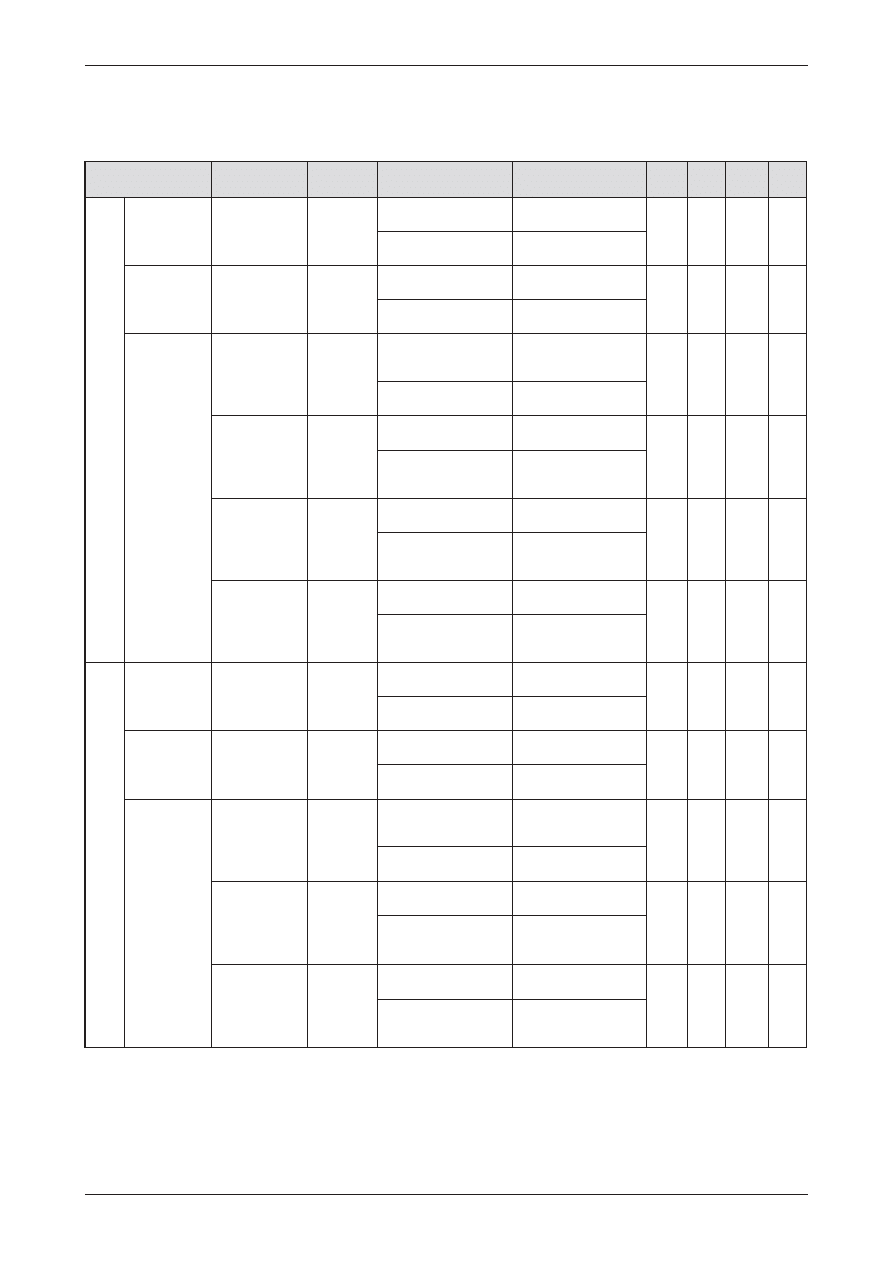
7.2
Lista modułów analogowych
*
Specjalny moduł funkcyjny FX2N-8AD może mierzyć zarówno temperaturę jak i prąd lub napięcie.
Podręcznik dla początkujących
7 – 5
Przetwarzanie wartości analogowych
Lista modułów analogowych
Rodzaj modułu
Oznaczenie
Liczba
kanałów
Zakres
Rozdzielczość
FX
1S
FX
1N
FX
2N
FX
2NC
FX
3U
Płytka
adaptacyjna
FX
1N
-2AD-BD
2
Napięcie:
0 V do 10 V DC
2,5 mV (12 bitów)
쎲
쎲
쑗
쑗
Prąd:
4 mA do 20 mA DC
8 μA (11 bitów)
Specjalny
adaptor
FX
3U
-4AD-ADP
4
Napięcie:
0 V do 10 V DC
2,5 mV (12 bitów)
쑗
쑗
쑗
쎲
Prąd:
4 mA do 20 mA DC
10 μA (11 bitów)
Specjalny blok
funkcyjny
FX
2N
-2AD
2
Napięcie:
0 V do 5 V DC
0 V do 10 V DC
2,5 mV (12 bitów)
쑗
쎲
쎲
쎲
Prąd:
4 mA do 20 mA DC
4 μA (12 bitów)
FX
2N
-4AD
4
Napięcie:
-10 V do 10 V DC
5 mV
(ze znakiem, 12 bitów)
쑗
쎲
쎲
쎲
Prąd:
4 mA do 20 mA DC
-20 mA do 20 mA DC
10 μA
(ze znakiem, 11 bitów)
FX
2N
-8AD*
8
Napięcie:
-10 V do 10 V DC
0,63 mV
(ze znakiem, 15 bitów)
쑗
쎲
쎲
쎲
Prąd:
4 mA do 20 mA DC
-20 mA do 20 mA DC
2,50 μA
(ze znakiem, 14 bitów)
FX
3U
-4AD
4
Napięcie:
-10 V do 10 V DC
0,32 mV
(ze znakiem, 16 bitów)
쑗
쑗
쑗
쎲
Prąd:
4 mA do 20 mA DC
-20 mA do 20 mA DC
1,25 μA
(ze znakiem, 15 bitów)
Płytka adapt-
acyjna
FX
1N
-1DA-BD
1
Napięcie:
0 V do 10 V DC
2,5 mV (12 bitów)
쎲
쎲
쑗
쑗
Prąd:
4 mA do 20 mA DC
8 μA (11 bitów)
Specjalny
adaptor
FX
3U
-4DA-ADP
4
Napięcie:
0 V do 10 V DC
2,5 mV (12 bitów)
쑗
쑗
쑗
쎲
Prąd:
4 mA do 20 mA DC
4 μA (12 bitów)
Specjalny blok
funkcyjny
FX
2N
-2DA
2
Napięcie:
0 V do 5 V DC
0 V do 10 V DC
2,5 mV (12 bitów)
쑗
쎲
쎲
쎲
Prąd:
4 mA do 20 mA DC
4 μA, (12 bitów)
FX
2N
-4DA
4
Napięcie:
-10 V do 10 V DC
5 mV
(ze znakiem, 12 bitów)
쑗
쎲
쎲
쎲
Prąd:
0 mA do 20 mA DC
4 mA do 20 mA DC
20 μA (10 bitów)
FX
3U
-4DA
4
Napiecie:
-10 V do 10 V DC
0,32 mV
(ze znakiem, 16 bitów)
쑗
쑗
쑗
쎲
Prąd:
0 mA do 20 mA DC
4 mA do 20 mA DC
0,63 μA (15 bitów)
Moduły
z
w
ejściami
analogowymi
Moduły
z
w
yjściami
analogowymi
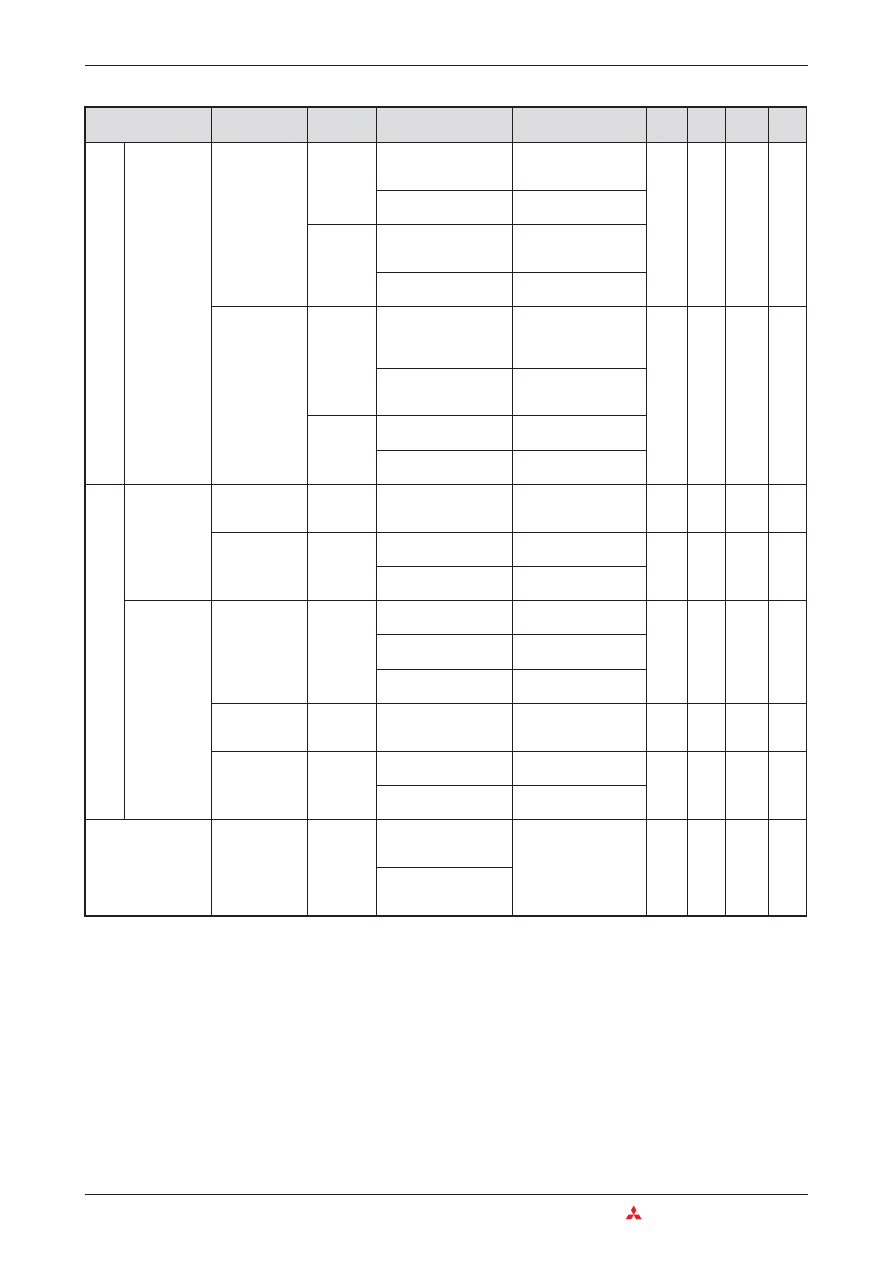
*
Specjalny moduł funkcyjny FX2N-8AD, jest w stanie zmierzyć temperaturę, prąd i napięcie.
쎲
Płytka adaptora, specjalny adaptor lub specjalny blok fukcyjny, mogą być użyte wraz z jednostką centralną
lub jednostką rozszerzającą tej serii.
쑗
Płytka adaptora, specjalny adaptor lub specjalny blok fukcyjny, nie mogą być użyte z tą serią.
7 – 6
MITSUBISHI ELECTRIC
Lista modułów analogowych
Przetwarzanie wartości analogowych
Moduły
do
pomiaru
temper
a
tury
Moduły
mieszane
z
w
ejściami
&
w
yjściami
analogowymi
Rodzaj modułu
Oznaczenie
Liczba
kanałów
Zakres
Rozdzielczość
FX
1S
FX
1N
FX
2N
FX
2NC
FX
3U
Specjalny blok
funkcyjny
FN-3A
2 wejscia
Napięcie:
0 V do 5 V DC
0 V do 10 V DC
40 mV (8 bitów)
쑗
쎲
쎲
쎲
Prąd:
4 mA do 20 mA DC
64 μA (8 bitów)
1 wejscie
Napięcie:
0 V do 5 V DC
0 V do 10 V DC
40 mV (8 bitów)
Prąd:
4 mA do 20 mA DC
64 μA (8 bitów)
FX2N-5A
4 wejscia
Napięcie:
-100 mV do 100 mV DC
-10 V do 10 V DC
50 μV
(ze znakiem, 12 bitów)
0,312 mV
(ze znakiem, 16 bitów)
쑗
쎲
쎲
쎲
Prąd:
4 mA do 20 mA DC
-20 mA do 20 mA DC
10 μA/1,25 μA
(ze znakiem, 15 bitów)
1 wejscie
Napięcie:
-10 V do 10 V DC
5 mV
(ze znakiem, 12 bitów)
Prąd:
0 mA do 20 mA DC
20 μA (10 bitów)
Specjalny
adaptor
FX
3U
-4AD-PT-AD
P
4
Termometr oporowy
Pt100:
-50 °C do 250 °C
0,1 °C
쑗
쑗
쑗
쎲
FX
3U
-4AD-TC-ADP
4
Termoelement typu K:
-100 °C do 1000 °C
0,4 °C
쑗
쑗
쑗
쎲
Termoelement typu J:
-100 °C to 600 °C
0,3 °C
Specjalny blok
funkcyjny
FX
2N
-8AD*
8
Termoelement typu K:
-100 °C do 1200 °C
0,1 °C
쑗
쎲
쎲
쎲
Termoelement typu J:
-100 °C do 600 °C
0,1 °C
Termoelement typu T:
-100 °C do 350 °C
0,1 °C
FX
2N
-4AD-PT
4
Termometr oporowy
Pt100:
-100 °C do 600 °C
0,2 do 0,3 °C
쑗
쎲
쎲
쎲
FX
2N
-4AD-TC
4
Termoelement typu K:
-100 °C do 1200 °C
0,4 °C
쑗
쎲
쎲
쎲
Termoelement typu J:
-100 °C do 600 °C
0,3 °C
Moduł regulacji
temperatury
(Specjalny blok
funkcyjny)
FX
2N
-2LC
2
Na przyklad z termoe-
lementem typu K:
-100 °C do 1300 °C
0,1 °C lub 1 °C
(w zależności od
użytego czujnika
temperatury)
쑗
쎲
쎲
쎲
Termometr oporowy
Pt100:
-200 °C do 600 °C
FX Beginners Manual
I
Indeks
Indeks
A
Automatyczne wyłączenie · · · · · · · · · · · · · · · 3-22
B
Bateria podtrzymująca pamięć · · · · · · · · · · · · · 2-9
Blokada styków · · · · · · · · · · · · · · · · · · · · · · 3-21
E
EEPROM · · · · · · · · · · · · · · · · · · · · · · · · · · · · 2-9
I
Instrukcja
ADD · · · · · · · · · · · · · · · · · · · · · · · · · · · 5-21
ANB · · · · · · · · · · · · · · · · · · · · · · · · · · · 3-12
AND · · · · · · · · · · · · · · · · · · · · · · · · · · · · 3-9
ANDF· · · · · · · · · · · · · · · · · · · · · · · · · · · 3-14
ANDP · · · · · · · · · · · · · · · · · · · · · · · · · · 3-14
ANI · · · · · · · · · · · · · · · · · · · · · · · · · · · · · 3-9
BMOV · · · · · · · · · · · · · · · · · · · · · · · · · · 5-10
CMP · · · · · · · · · · · · · · · · · · · · · · · · · · · 5-15
DIV · · · · · · · · · · · · · · · · · · · · · · · · · · · · 5-24
FMOV · · · · · · · · · · · · · · · · · · · · · · · · · · 5-11
FROM · · · · · · · · · · · · · · · · · · · · · · · · · · 5-14
INV · · · · · · · · · · · · · · · · · · · · · · · · · · · · 3-20
LD · · · · · · · · · · · · · · · · · · · · · · · · · · · · · 3-6
LDF · · · · · · · · · · · · · · · · · · · · · · · · · · · · 3-14
LDI · · · · · · · · · · · · · · · · · · · · · · · · · · · · · 3-6
LDP · · · · · · · · · · · · · · · · · · · · · · · · · · · · 3-14
MC · · · · · · · · · · · · · · · · · · · · · · · · · · · · 3-19
MCR · · · · · · · · · · · · · · · · · · · · · · · · · · · 3-19
MOV · · · · · · · · · · · · · · · · · · · · · · · · · · · · 5-7
MPP · · · · · · · · · · · · · · · · · · · · · · · · · · · 3-17
MPS · · · · · · · · · · · · · · · · · · · · · · · · · · · 3-17
MRD · · · · · · · · · · · · · · · · · · · · · · · · · · · 3-17
MUL · · · · · · · · · · · · · · · · · · · · · · · · · · · 5-23
OR · · · · · · · · · · · · · · · · · · · · · · · · · · · · 3-11
ORB· · · · · · · · · · · · · · · · · · · · · · · · · · · · 3-12
ORF· · · · · · · · · · · · · · · · · · · · · · · · · · · · 3-14
ORI · · · · · · · · · · · · · · · · · · · · · · · · · · · · 3-11
ORP· · · · · · · · · · · · · · · · · · · · · · · · · · · · 3-14
OUT · · · · · · · · · · · · · · · · · · · · · · · · · · · · 3-6
PLF · · · · · · · · · · · · · · · · · · · · · · · · · · · · 3-18
PLS · · · · · · · · · · · · · · · · · · · · · · · · · · · · 3-18
RST · · · · · · · · · · · · · · · · · · · · · · · · · · · · 3-15
SET · · · · · · · · · · · · · · · · · · · · · · · · · · · · 3-15
SUB · · · · · · · · · · · · · · · · · · · · · · · · · · · · 5-22
TO · · · · · · · · · · · · · · · · · · · · · · · · · · · · 5-15
L
Liczby dwójkowe · · · · · · · · · · · · · · · · · · · · · · 3-2
Liczby ósemkowe · · · · · · · · · · · · · · · · · · · · · · 3-4
Liczby szesnastkowe · · · · · · · · · · · · · · · · · · · · 3-3
Licznik
Funkcje · · · · · · · · · · · · · · · · · · · · · · · · · · 4-7
Pośrednie określanie nastaw· · · · · · · · · · · · 4-11
M
Moduły do pomiaru temperatury
Funkcja · · · · · · · · · · · · · · · · · · · · · · · · · · 7-2
Przegląd · · · · · · · · · · · · · · · · · · · · · · · · · 7-6
Moduł do sterowania temperaturą · · · · · · · · 7-5, 7-6
Moduły z wejściami analogowymi
Funkcja · · · · · · · · · · · · · · · · · · · · · · · · · · 7-1
Przegląd · · · · · · · · · · · · · · · · · · · · · · · · · 7-5
Moduły z wyjściami analogowymi
Funkcja · · · · · · · · · · · · · · · · · · · · · · · · · · 7-2
Przegląd · · · · · · · · · · · · · · · · · · · · · · · · · 7-5
O
Opóźnienie wyłączenia · · · · · · · · · · · · · · · · · 4-14
P
Pamięć buforowa · · · · · · · · · · · · · · · · · · · · · 5-12
Płytki adaptacyjne (wejścia/wyjścia analogowe) · · 7-4
Przekaźniki specjalne · · · · · · · · · · · · · · · · · · · 4-3
Przełącznik RUN/STOP · · · · · · · · · · · · · · · · · · · 2-9
Przetwarzanie obrazu procesu· · · · · · · · · · · · · · 2-2
Przykład programowania
Brama ze zwijaną żaluzją · · · · · · · · · · · · · · 3-28
System alarmowy · · · · · · · · · · · · · · · · · · · 3-23
Generator sygnału zegarowego· · · · · · · · · · 4-16
Opóźnione załączenie · · · · · · · · · · · · · · · · · 4-4
II
MITSUBISHI ELECTRIC
Indeks
R
Rejestry danych · · · · · · · · · · · · · · · · · · · · · · · 4-9
Rejestry specjalne · · · · · · · · · · · · · · · · · · · · · 4-10
Rozdzielczość (moduły analogowe) · · · · · · · · · · 7-3
S
Specjalne moduły funkcyjne
Moduły analogowe · · · · · · · · · · · · · · · · · · 7-4
Wymiana danych z jednostką centralną· · · · · 5-12
Specjalny adaptor · · · · · · · · · · · · · · · · · · · · · 7-4
Sygnał sprzężenia zwrotnego · · · · · · · · · · · · · 3-22
T
Termoelement· · · · · · · · · · · · · · · · · · · · · · · · 7-2
Termometr oporowy · · · · · · · · · · · · · · · · · · · · 7-2
Termometry oporowe Pt100 · · · · · · · · · · · · · · · 7-2
Timer podtrzymywany · · · · · · · · · · · · · · · · · · 4-5
Timery, liczniki czasu · · · · · · · · · · · · · · · · · · · · 4-4
U
Urządzenia wyłączania awaryjnego· · · · · · · · · · 3-21
Urządzenie
Adres · · · · · · · · · · · · · · · · · · · · · · · · · · · 3-1
Przegląd liczników · · · · · · · · · · · · · · · · · · · 4-8
Przegląd rejestrów danych · · · · · · · · · · · · · 4-10
Przegląd rejestrów zbioru · · · · · · · · · · · · · 4-11
Przegląd wejść/wyjść · · · · · · · · · · · · · · · · · 4-2
Nazwa · · · · · · · · · · · · · · · · · · · · · · · · · · · 3-1
Przegląd przekaźników · · · · · · · · · · · · · · · · 4-3
Przegląd timerów· · · · · · · · · · · · · · · · · · · · 4-6
W
Wbudowany zasilacz pomocniczy · · · · · · · · · · · 2-9
Z
Zabezpieczenie przed przerwaniem kabla · · · · · 3-21
Zbocze narastające · · · · · · · · · · · · · · · · · · · · 3-14
Zbocze opadającej · · · · · · · · · · · · · · · · · · · · 3-14
Złącza optyczne · · · · · · · · · · · · · · · · · · · · · · · 2-6

MITSUBISHI ELECTRIC
MITSUBISHI ELECTRIC EUROPE B.V.
German Branch
Gothaer Straße 8
D-40880 Ratingen
Phone: +49 (0)2102 / 486-0
Fax: +49 (0)2102 / 486-1120
MITSUBISHI ELECTRIC EUROPE B.V.
French Branch
25, Boulevard des Bouvets
F-92741 Nanterre Cedex
Phone: +33 (0)1 / 55 68 55 68
Fax: +33 (0)1 / 55 68 57 57
MITSUBISHI ELECTRIC EUROPE B.V.
Irish Branch
Westgate Business Park, Ballymount
IRL-Dublin 24
Phone: +353 (0)1 4198800
Fax: +353 (0)1 4198890
MITSUBISHI ELECTRIC EUROPE B.V.
Italian Branch
Viale Colleoni 7
I-20041 Agrate Brianza (MI)
Phone: +39 039 / 60 53 1
Fax: +39 039 / 60 53 312
MITSUBISHI ELECTRIC EUROPE B.V.
Spanish Branch
Carretera de Rubí 76-80
E-08190 Sant Cugat del Vallés (Barcelona)
Phone: +34 93 / 565 3131
Fax: +34 93 / 589 1579
MITSUBISHI ELECTRIC EUROPE B.V.
UK Branch
Travellers Lane
UK-Hatfield, Herts. AL10 8XB
Phone: +44 (0)1707 / 27 61 00
Fax: +44 (0)1707 / 27 86 95
MITSUBISHI ELECTRIC CORPORATION
Office Tower “Z”14 F
8-12,1 chome, Harumi Chuo-Ku
Tokyo 104-6212
Phone: +81 3 622 160 60
Fax: +81 3 622 160 75
MITSUBISHI ELECTRIC AUTOMATION
500 Corporate Woods Parkway
Vernon Hills, IL 60061
Phone: +1 847 478 21 00
Fax: +1 847 478 22 83
MITSUBISHI ELECTRIC EUROPE B.V.
Kunden-Technologie-Center Nord
Revierstraße 5
D-44379 Dortmund
Phone: +49 (0)231 / 96 70 41 0
Fax: +49 (0)231 / 96 70 41 41
MITSUBISHI ELECTRIC EUROPE B.V.
Kunden-Technologie-Center Süd-Ost
Am Söldnermoos 8
D-85399 Hallbergmoos
Phone: +49 (0)811 / 99 87 40
Fax: +49 (0)811 / 998 74 10
MITSUBISHI ELECTRIC EUROPE B.V.
Kunden-Technologie-Center Süd-West
Kurze Straße 40
D-70794 Filderstadt
Phone: +49 (0)711 / 77 05 98 0
Fax: +49 (0)711 / 77 05 98 79
GEVA
Wiener Straße 89
AT-2500 Baden
Phone: +43 (0)2252 / 85 55 20
Fax: +43 (0)2252 / 488 60
Koning & Hartman b.v.
Industrial Solutions
Woluwelaan 31
BE-1800 Vilvoorde
Phone: +32 (0)2 / 257 02 40
Fax: +32 (0)2 / 257 02 49
TEHNIKON
Oktyabrskaya 16/5, Off. 703-711
BY-220030 Minsk
Phone: +375 (0)17 / 210 46 26
Fax: +375 (0)17 / 210 46 26
AKHNATON
4 Andrej Ljapchev Blvd. Pb 21
BG-1756 Sofia
Phone: +359 (0)2 / 97 44 05 8
Fax: +359 (0)2 / 97 44 06 1
INEA CR d.o.o.
Losinjska 4 a
HR-10000 Zagreb
Phone: +385 (0)1 / 36 940 - 01/ -02/ -03
Fax: +385 (0)1 / 36 940 - 03
Beijer Electronics A/S
Lautruphoj 1-3
DK-2750 Ballerup
Phone: +45 (0)70 / 26 46 46
Fax: +45 (0)70 / 26 48 48
Beijer Electronics Eesti OÜ
Pärnu mnt.160i
EE-11317 Tallinn
Phone: +372 (0)6 / 51 81 40
Fax: +372 (0)6 / 51 81 49
Beijer Electronics OY
Jaakonkatu 2
FIN-01620 Vantaa
Phone: +358 (0)207 / 463 500
Fax: +358 (0)207 / 463 501
UTECO A.B.E.E.
5, Mavrogenous Str.
GR-18542 Piraeus
Phone: +30 211 / 1206 900
Fax: +30 211 / 1206 999
Koning & Hartman b.v.
Haarlerbergweg 21-23
NL-1101 CH Amsterdam
Phone: +31 (0)20 / 587 76 00
Fax: +31 (0)20 / 587 76 05
Beijer Electronics SIA
Vestienas iela 2
LV-1009 Riga
Phone: +371 (0)784 / 2280
Fax: +371 (0)784 / 2281
Beijer Electronics UAB
Savanoriu Pr. 187
LT-02300 Vilnius
Phone: +370 (0)5 / 232 3101
Fax: +370 (0)5 / 232 2980
Intehsis srl
bld. Traian 23/1
MD-2060 Kishinev
Phone: +373 (0)22 / 66 4242
Fax: +373 (0)22 / 66 4280
Beijer Electronics A/S
Postboks 487
NO-3002 Drammen
Phone: +47 (0)32 / 24 30 00
Fax: +47 (0)32 / 84 85 77
MPL Technology Sp. z o.o.
Ul.Krakowska 50
PL-32-083 Balice
Phone: +48 (0)12 / 630 47 00
Fax: +48 (0)12 / 630 47 01
SIRIUS TRADING & SERVICES SRL
Aleea Lacul Morii Nr. 3
RO-060841 Bucuresti, Sector 6
Phone: +40 (0)21 / 430 40 06
Fax: +40 (0)21 / 430 40 02
Beijer Electronics Automation AB
Box 426
S-20124 Malmö
Phone: +46 (0)40 / 35 86 00
Fax: +46 (0)40 / 35 86 02
ECONOTEC AG
Hinterdorfstr. 12
CH-8309 Nürensdorf
Phone: +41 (0)44 / 838 48 11
Fax: +41 (0)44 / 838 48 12
CRAFT Consulting & Engineering d.o.o.
Toplicina str.4 lok 6
SER-1800 Nis
Phone: +381 (0)18 / 292-24-4/5 , 523 962
Fax: +381 (0)18 / 292-24-4/5 , 523 962
INEA SR d.o.o.
Karadjordjeva 12/260
SER-113000 Smederevo
Phone: +381 (0)26 / 617 163
Fax: +381 (0)26 / 617 163
CS Mtrade Slovensko, s.r.o.
Vajanskeho 58
SK - 92101 Piestany
Phone: +421 (0)33 / 7742 760
Fax: +421 (0)33 / 7735 144
INEA d.o.o.
Stegne 11
SI-1000 Ljubljana
Phone: +386 (0)1 / 513 8100
Fax: +386 (0)1 / 513 8170
AutoCont Control Systems,s.r.o.
Jelinkova 59/3
CZ-721 00 Ostrava Svinov
Phone: +420 (0)59 / 5691 150
Fax: +420 (0)59 / 5691 199
AutoCont Control Systems,s.r.o.
Technologická 374/6
CZ-708 00 Ostrava - Pustkovec
Phone: +420 595 691 150
Fax: +420 595 691 199
B:TECH, a.s.
Na Ostrove 84
CZ - 58001 Havlickuv Brod
Phone: +420 (0)569 / 408 841
Fax: +420 (0)569 / 408 889
B:TECH, a.s.
Headoffice
U Borové 69
CZ-580 01 Havlí?k?v Brod
Phone: +420 569 777 777
Fax: +420 569 777 778
GTS
Darulaceze Cad. No. 43 KAT. 2
TR-34384 Okmeydani-Istanbul
Phone: +90 (0)212 / 320 1640
Fax: +90 (0)212 / 320 1649
CSC Automation Ltd.
15, M.Raskova St., Fl.10, Office 1010
UA-02002 Kiev
Phone: +380 (0)44 / 494 33 55
Fax: +380 (0)44 / 494-33-66
Meltrade Ltd.
Fertõ utca 14.
HU-1107 Budapest
Phone: +36 (0)1 / 431-9726
Fax: +36 (0)1 / 431-9727
Kazpromautomatics Ltd.
2, Scladskaya str.
KAZ-470046 Karaganda
Phone: +7 3212 / 50 11 50
Fax: +7 3212 / 50 11 50
ELEKTROSTILY
Rubzowskaja nab. 4-3, No. 8
RU-105082 Moscow
Phone: +7 495 / 545 3419
Fax: +7 495 / 545 3419
ICOS
Industrial Computer Systems ZAO
Ryazanskij Prospekt, 8A, Office 100
RU-109428 Moscow
Phone: +7 495 / 232 0207
Fax: +7 495 / 232 0327
NPP “URALELEKTRA”
Sverdlova 11A
RU-620027 Ekaterinburg
Phone: +7 343 / 353 2745
Fax: +7 343 / 353 2461
Ilan & Gavish Ltd.
Automation Service
24 Shenkar St., Kiryat Arie
IL-49001 Petah-Tiqva
Phone: +972 (0)3 / 922 18 24
Fax: +972 (0)3 / 924 0761
Texel Electronics Ltd.
2 Ha´umanut, P.O.B. 6272
IL-42160 Netanya
Phone: +972 (0)9 / 863 08 91
Fax: +972 (0)9 / 885 24 30
CBI Ltd.
Private Bag 2016
ZA-1600 Isando
Phone: + 27 (0)11 / 928 2000
Fax: + 27 (0)11 / 392 2354
Mitsubishi Electric Europe B.V. /// FA - European Business Group /// Gothaer Straße 8 /// D-40880 Ratingen /// Germany
Tel.: +49(0)2102-4860 /// Fax: +49(0)2102-4861120 /// info@mitsubishi-automation.de /// www.mitsubishi-automation.com
Specyfikacje mogą ulec zmianie bez powiadomienia /// Nr art. 209120-A /// 10.2007
MITSUBISHI
ELECTRIC
FACTORY AUTOMATION
Document Outline
- Cover
- Wskazówki związane z bezpieczeństwem
- Contents
- 1 Wstêp
- 2 Programowalne sterowniki logiczne
- 2.1 Co to jest PLC? 2-1
- 2.2 Jak sterowniki PLC przetwarzaj¹ programy? 2-2
- 2.3 Rodzina MELSEC FX 2-4
- 2.4 Wybór w³aœciwego sterownika 2-5
- 2.5 Budowa sterownika 2-6
- 2.5.1 Obwody wejœciowe i wyjœciowe 2-6
- 2.5.2 Budowa jednostki centralnej MELSEC FX1S 2-6
- 2.5.3 Budowa jednostki centralnej MELSEC FX1N 2-7
- 2.5.4 Budowa jednostki centralnej MELSEC FX2N 2-7
- 2.5.5 Budowa jednostki centralnej MELSEC FX2NC 2-8
- 2.5.6 Budowa jednostki centralnej MELSEC FX3U 2-8
- 2.5.7 Elementy funkcjonalne i czêœci monta¿owe PLC 2-9
- 3 Wstêp do programowania
- 3.1 Struktura instrukcji programu 3-1
- 3.2 Bity, bajty i s³owa 3-2
- 3.3 Systemy liczbowe 3-2
- 3.4 Zestaw instrukcji podstawowych 3-5
- 3.4.1 Pocz¹tkowe operacje logiczne 3-6
- 3.4.2 Wyprowadzenie wyniku operacji logicznej 3-6
- 3.4.3 U¿ywanie wy³¹czników i czujników 3-8
- 3.4.4 Operacja AND 3-9
- 3.4.5 Operacja OR 3-11
- 3.4.6 Instrukcje do ³¹czenia operacji na blokach 3-12
- 3.4.7 Wykonywanie dzia³añ wyzwalanych impulsem 3-14
- 3.4.8 Ustawianie i kasowanie urz¹dzeñ 3-15
- 3.4.9 Wprowadzanie do pamiêci, odczytywanie i kasowanie wyników dzia³ania 3-17
- 3.4.10 Generowanie impulsów 3-18
- 3.4.11 Funkcja Master Control (instrukcje MC i MCR) 3-19
- 3.4.12 Odwracanie wyniku dzia³ania 3-20
- 3.5 Przede wszystkim bezpieczeñstwo! 3-21
- 3.6 Oprogramowanie u¿ytkowe w PLC 3-23
- 4 Szczegó³owy opis urz¹dzeñ
- 5 Programowanie zaawansowane
- 5.1 Instrukcje u¿ytkowe 5-1
- 5.2 Instrukcje do przenoszenia danych 5-7
- 5.2.1 Przenoszenie pojedynczych wartoœci instrukcj¹ MOV 5-7
- 5.2.2 Przenoszenie grup urz¹dzeñ bitowych 5-9
- 5.2.3 Przenoszenie bloków danych za pomoc¹ instrukcji BMOV 5-10
- 5.2.4 Kopiowanie urz¹dzeñ Ÿród³owych do wielu miejsc docelowych (FMOV) 5-11
- 5.2.5 Wymiana danych ze specjalnymi modu³ami funkcyjnymi 5-12
- 5.3 Instrukcje porównania 5-15
- 5.4 Instrukcje matematyczne 5-20
- 6 Mo¿liwoœci rozszerzania
- 7 Przetwarzanie wartoœci analogowych
- Indeks
Wyszukiwarka
Podobne podstrony:
Abbas A Język arabski dla Polaków Podręcznik dla początkujących
EPLAN Electric p8 podręcznik dla początkujących
Jezyk slowacki Podrecznik dla poczatkujacych scrap
Testowanie oprogramowania Podrecznik dla poczatkujacych szteop 2
HIPNOZA podręcznik dla początkujących
Testowanie oprogramowania Podrecznik dla poczatkujacych
Testowanie oprogramowania Podrecznik dla poczatkujacych 2
Jezyk slowacki Podrecznik dla poczatkujacych s
Testowanie oprogramowania Podrecznik dla poczatkujacych
Abbas A Język arabski dla Polaków Podręcznik dla początkujących
Hipnoza Podrecznik Dla Poczatkujacych
więcej podobnych podstron