
ALGEBRA LINIOWA I GEOMETRIA 1
MAREK SZYJEWSKI
Date: 26 stycznia 2005.
1

2
Spis Treści
3
3
3
4
4
5
Mały słownik człowieka średnio wykształconego
5
15
17
17
Podprzestrzenie przestrzeni wektorowych.
19
21
Podprzestrzenie generowane przez wektory.
23
26
28
36
39
43
44
47
51
Macierze przekształceń liniowych
53
57
Wektory własne i wartości własne
60
Wielomian charakterystyczny i wielomian minimalny endomorfizmu
65
Zadania różne: Macierze wielomianowe i diagonalna postać kanoniczna
69
Zadania różne: kwadraty magiczne
71
74
Zadania różne: Rozkład Jordana
75
76
Przestrzenie dwuliniowe (ortogonalne)
78
Zadania różne: Wektory izotropowe i płaszczyzny hiperboliczne.
81
Przekształcenia ortogonalne. Izomorfizmy przestrzeni ortogonalnych.
83
84
86
ALGEBRA LINIOWA I GEOMETRIA 1
3
§ 1. Informacje ogólne
Algebra liniowa i geometria 1
ALN1-03
Specjalność: F+I+N+T+Z
Poziom: 2
Status: O
Liczba godzin:
3W+3Ćw
tydz.
L. pkt.: 7
Socrates code: 11.1
Zaliczenie przedmiotu: zaliczenie
1. Plan wykładu
Plan odpowiada oficjalnemu programowi z
Wykład będzie prowadzony w oparciu o podręczniki oznaczone w
podkreśle-
niem i symbolami
BG1 , BG2 , BB . Oznacza to, że słuchacze mają obowiązek przestudiować
podane fragmenty podręczników, a treścią wykładu będą wyjaśnienia i komentarze do materiału
z podręczników.
§ 2. Plan
(1) Przestrzenie liniowe (wektorowe):
(a) Pojęcie przestrzeni wektorowej
BB 32-47, BG1 165-170;
(b) Podprzestrzenie przestrzeni linowych
BB 47-50, BG1 170-173;
(c) Przestrzeń generowana przez układ wektorów
BB 50-52, BG1 189-198;
(d) Suma algebraiczna podprzestrzeni; sumy proste
BB 55-59, BG1 173-180;
(e) Warstwy względem podprzestrzeni
BB 53-55, BG1 181-182
(f) Przestrzeń ilorazowa
BB 213-215, BG1 182-184;
(g) Liniowa niezależność wektorów
BB 59-63, BG1 199-207;
(h) Baza przestrzeni wektorowej
BB 64-68, BG1 214-224;
(i) Wymiar przestrzeni liniowej
BB 69-75, BG1 225-236.
(2) Macierze i wyznaczniki:
(a) Działania na macierzach
BB 145-148, BG1 82-88;
(b) Wyznacznik macierzy i jego własności
BB 156-166, BG1 106-131;
(c) Rząd macierzy
BB 148-151, BG1 61-68, 255-263;
(d) Iloczyn macierzy
BB 236-239, BG1 83-88;
(e) Twierdzenie Cauchy’ego
BB 241-242, BG1 131-135;
(f) Macierze odwracalne
BB 239-241, BG1 90-102, 141-153.
(3) Układy równań liniowych:
(a) Metoda eliminacji Gaussa
BB 138-144, 151-155, BG1 44-65, 70-81;
1
Carl F. Gauss (1777 - 1855) matematyk niemiecki, jeden z najwybitniejszych i najwszechstronniejszych matem-
atyków wszystkich czasów.
4
MAREK SZYJEWSKI
(b) Twierdzenie Kroneckera
-Capelli
BB 148-151, BG1 68-69;
(c) Struktura zbioru rozwiązań układu równań liniowych
BB 210, BG1 263-269;
(d) Wzory Cramera
BB 167-172, BG1 150-153.
(4) Przekształcenia liniowe:
(a) Przekształcenia liniowe i ich macierze;
(b) Macierze przejścia;
(c) Przestrzeń przekształceń liniowych a przestrzeń macierzy;
(d) Algebra endomorfizmów a algebra macierzy;
(e) Przestrzeń sprzężona, przekształcenie sprzężone.
(5) Diagonalizacja i postacie kanoniczne endomorfizmów:
(a) Podprzestrzenie niezmiennicze;
(b) Wartości własne i wektory własne;
(c) Diagonalizowalność endomorfizmu;
(d) Twierdzenie Jordana
(6) Przestrzenie ortogonalne:
(a) Funkcjonały dwuliniowe i ich macierze;
(b) Nieosobliwość funkcjonału dwuliniowego;
(c) Formy kwadratowe;
(d) Przestrzenie ortogonalne i ich podprzestrzenie.
(7) Bazy prostopadłe:
(a) Prostopadłość;
(b) Dopełnienie ortogonalne podprzestrzeni;
(c) Istnienie baz prostopadłych;
(d) Postać kanoniczna formy kwadratowej.
§ 3. Literatura
3.1. Podręczniki.
(1) G. Banaszak, W. Gajda Elementy algebry liniowej, cz. 1, WNT 2002; 352 str.
BG1
(2) G. Banaszak, W. Gajda Elementy algebry liniowej, cz. 2, WNT 2002; 298 str.
BG2
(3) A. Białynicki-Birula Algebra
(M 40), PWN 1971, 287 str.
(4) A. Białynicki-Birula Algebra liniowa z geometrią
(M 48), PWN 1976, 589 str.
BB
(5) N. W. Jefimow, E. R. Rozendorn Algebra liniowa wraz z geometrią wielowymiarową, PWN
1976,
(6) J. Komorowski Od liczb zespolonych do tensorów, spinorów, algebr Liego i kwadryk, PWN
1978, 323 str.
(7) A. I. Kostrykin, J. I. Manin Algebra liniowa i geometria
PWN 1993,
(8) A. Mostowki, M. Stark Algebra liniowa
PWN 1975, 190 str.
Uwaga 3.1. Wykładowca nie zaleca podręcznika M. Moszyńskiej i J. Święcickiej.
2
Leopold Kronecker (1823 - 1891) matematyk niemiecki.
3
Alfred Capelli (1855 - 1910) matematyk włoski.
4
Camille M. E. Jordan (1838 - 1922) matematyk francuski.

ALGEBRA LINIOWA I GEOMETRIA 1
5
3.2. Zbiory zadań.
(1) L. Jeśmianowicz, J. Łoś Zbiór zadań z algebry, PWN 1975,
(2) A.I. Kostrykin (red.) Zbiór zadań z algebry, PWN 1995,
(3) D. K. Faddiejew, I. S. Somiński Sbornik zadacz po wysszej ałgiebrie, Moskwa 1977 (w jęz.
rosyjskim)
(4) I. W. Prskurjakow Sbornik zadacz po liniejnoj ałgiebrie, Moskwa 1978 (w jęz. rosyjskim)
§ 4.
Mały słownik człowieka średnio wykształconego
„...
- A po co ja się właściwie tej Mowy uczę, co?
- Po to, żeby ją poznać. Tego, czego się nie zna wypada się uczyć. Ten, kto nie
zna języków, jest kaleką.
- Wszyscy i tak mówią wspólnym!
- Fakt. Ale niektórzy nie tylko. Zaręczam ci, Ciri, że lepiej zaliczać się do niek-
tórych niż do wszystkich. ”
A. Sapkowski „Krew elfów ”
=: Wprowadzony przez Roberta Recorde (1510 - 1558) w 1557 symbol relacji równości, iden-
tyczności. Napis a = b jest zdaniem orzekającym, że a i b są jednym i tym samym obiektem.
Dokładniej, relacja identyczności spełnia następujące aksjomaty:
(1) Dla każdego x zachodzi x = x;
(2) Dla każdych x, y jeśli x = y, to y = x;
(3) Dla każdych x, y, z jeśli x = y i y = z, to x = z;
(4) Dla każdej funkcji n zmiennych f , dla każdych x, y, t
2
, . . . , t
n
jeśli x = y, to
f (x, t
2
, . . . , t
n
) = f (y, t
2
, . . . , t
n
);
(5) Dla każdej relacji n-argumentowej P , dla każdych x, y, t
2
, . . . , t
n
jeśli x = y, to
P (x, t
2
, . . . , t
n
) ⇒ P (y, t
2
, . . . , t
n
).
Pierwszy aksjomat orzeka, że relacja równości jest zwrotna, z drugiego aksjomatu
wynika, że relacja równości jest symetryczna. Trzeci aksjomat stwierdza przechod-
niość relacji równości. Ostatnie dwa aksjomaty stwierdzają, że równych obiektów nie
można w żaden sposób od siebie odróżnić.
Jeden z aksjomatów teorii mnogości,
(albo: regularności),
zabrania (między innymi) pisania znaku równości między zbiorem a jego elementem.
α: mała pierwsza litera alfabetu greckiego; nazwa: alfa; wartość fonetyczna: a; łaciński
odpowiednik: a; pochodzi od fenickiej litery alef (
A, a).

6
MAREK SZYJEWSKI
β: mała druga litera alfabetu greckiego; nazwa: beta; wartość fonetyczna: w; łaciński
odpowiednik: b; pochodzi od fenickiej litery bét (
B, b).
γ: mała trzecia litera alfabetu greckiego; nazwa: gamma; wartość fonetyczna: g; łaciński
odpowiednik: g; pochodzi od fenickiej litery gimmel (
G, g).
δ: mała piąta litera alfabetu greckiego; nazwa: delta; wartość fonetyczna: d; łaciński odpowied-
nik: d; pochodzi od fenickiej litery dalet (
D, d).
ε: mała szósta litera alfabetu greckiego; nazwa: epsilon; wartość fonetyczna: e; łaciński
odpowiednik: e; pochodzi od fenickiej litery hé (
E, e).
ζ: mała siódma litera alfabetu greckiego; nazwa: dzeta; wartość fonetyczna: dz (z); łaciński
odpowiednik: z; pochodzi od fenickiej litery zajin (
Z).
η: mała ósma litera alfabetu greckiego; nazwa: eta; wartość fonetyczna: e; łaciński odpowied-
nik: e; pochodzi od fenickiej litery hét (
H, h).
θ: mała dziewiąta litera alfabetu greckiego; nazwa: theta; wartość fonetyczna: th; łaciński
odpowiednik: th, t; pochodzi od fenickiej litery tét (
).
ϑ: mała dziewiąta litera alfabetu greckiego; nazwa: theta; wartość fonetyczna: th; łaciński
odpowiednik: th, t; pochodzi od fenickiej litery tét (
).
ι: mała dziesiąta litera alfabetu greckiego; nazwa: jota; wartość fonetyczna: i, j; łaciński
odpowiednik: i; pochodzi od fenickiej litery jod (
I).
κ: mała jedenasta litera alfabetu greckiego; nazwa: kappa; wartość fonetyczna: k; łaciński
odpowiednik: c (k); pochodzi od fenickiej litery kaf (
K, k).
λ: mała dwunasta litera alfabetu greckiego; nazwa: lambda; wartość fonetyczna: l; łaciński
odpowiednik: l; pochodzi od fenickiej litery lamed (
L, l).
µ: mała trzynasta litera alfabetu greckiego; nazwa: mi; wartość fonetyczna: m; łaciński
odpowiednik: m; pochodzi od fenickiej litery mém (
M, m).
ν: mała czternasta litera alfabetu greckiego; nazwa: ni; wartość fonetyczna: n; łaciński
odpowiednik: n; pochodzi od fenickiej litery nun (
N, n).
ξ: mała piętnasta litera alfabetu greckiego; nazwa: ksi; wartość fonetyczna: x; łaciński
odpowiednik: x; pochodzi od fenickiej litery sameh (
).
o: mała szesnasta litera alfabetu greckiego; nazwa: omikron; wartość fonetyczna: o; łaciński
odpowiednik: o; pochodzi od fenickiej litery ’ajin (
O).
π: mała siedemnasta litera alfabetu greckiego; nazwa: pi; wartość fonetyczna: b; łaciński
odpowiednik: p; pochodzi od fenickiej litery pé (
P, p).
ρ: mała osiemnasta litera alfabetu greckiego; nazwa: ro; wartość fonetyczna: r; łaciński
odpowiednik: r; pochodzi od fenickiej litery resz (
R, r).

ALGEBRA LINIOWA I GEOMETRIA 1
7
σ: mała dziewiętnasta litera alfabetu greckiego; nazwa: sigma; wartość fonetyczna: s; łaciński
odpowiednik: s; pochodzi od fenickiej litery szin (
S).
τ : mała dwudziesta litera alfabetu greckiego; nazwa: tau; wartość fonetyczna: t; łaciński
odpowiednik: t; pochodzi od fenickiej litery taw (
T).
υ: mała dwudziesta pierwsza litera alfabetu greckiego; nazwa: ypsylon; wartość fonetyczna:
u; łaciński odpowiednik: y.
φ: mała dwudziesta trzecia litera alfabetu greckiego; nazwa: fi; wartość fonetyczna: f;
łaciński odpowiednik: ph.
ϕ: mała dwudziesta trzecia litera alfabetu greckiego; nazwa: fi; wartość fonetyczna: f;
łaciński odpowiednik: ph.
χ: mała dwudziesta czwarta litera alfabetu greckiego; nazwa: chi; wartość fonetyczna: bez-
dźwięczne h lub sz (dialekt pontyjski); łaciński odpowiednik: ch.
ψ: mała dwudziesta piąta litera alfabetu greckiego; nazwa: psi; wartość fonetyczna: ps;
łaciński odpowiednik: ps.
ω: mała dwudziesta szósta litera alfabetu greckiego; nazwa: omega; wartość fonetyczna:
długie o; łaciński odpowiednik: o.
ς: mała dwudziesta siódma litera alfabetu greckiego; nazwa: końcowe sigma; wartość fone-
tyczna: s; łaciński odpowiednik: s.
ad: (łac.) do; odsyłacz: ad 1. (ad primum) - do pierwszego; ad 2. (ad secundum) - do
drugiego, itd. Per aspera ad astra - przez trudy do gwiazd.
Uwaga! „Po ad nie stawia się kropki, gdyż słowo to nie jest skrótem, lecz łacińskim przy-
imkiem o znaczeniu do” (M. Bańko, M. Krajewska „Słownik wyrazów kłopotliwych”;
PWN Warszawa 1994).
W amerykańskim angielskim ’ad’ oznacza reklamę, ogłoszenie (skrót od advertisement,
bez kropki).
adekwatny: „odpowiedni, zgodny, przystosowany, ściśle dopasowany.
- łac.
adaequatus
p.p. od adaequare ’zrównać’ ” (W. Kopaliński „Słownik wyrazów obcych i zwrotów
obcojęzycznych”, wyd. XIII, WP Warszawa 1983).
Słowo ad nie jest skrótem od ”adekwatnie”, w ogóle nie jest skrótem.
adn.: tak wyglądałby skrót słowa „adnotacja” utworzony zgodnie z zasadami polskiej or-
tografii, gdyby komukolwiek taki skrót kiedykolwiek do czegokolwiek był potrzebny.
adnotacja: „uwaga, dopisek, przypis, notatka, krótka informacja (np. bibliograficzna); ad
notam (łac.) do wiadomości” (W. Kopaliński „Słownik wyrazów obcych i zwrotów
obcojęzycznych”, wyd. XIII, WP Warszawa 1983). W szczególności rozwiązania zadania
egzaminacyjnego nie można nazwać adnotacją; dopisek sprawdzającego typu „nonsens!”
albo „ort.” jest przykładem adnotacji.

8
MAREK SZYJEWSKI
aksjomat podstawiania: albo aksjomat zastępowania - jeden z aksjomatów teorii mno-
gości, zarówno ZF, jak i GBN, pozwalający tworzyć nowe zbiory z danych zbiorów:
dla każdej funkcji f : A → B i każdego zbioru C ⊂ A istnieje zbiór f (C) = {f (t) : t ∈ C}
taki, że
x ∈ f (C) ⇔ ∃
t∈C
[x = f (t)] .
Zbiór f (C) nazywany obrazem zbioru C przez funkcję f , wyrażenie f (t) - równaniem
parametrycznym zbioru f (C), a zbiór C - zakresem parametru t.
aksjomat regularności: albo aksjomat ufundowania - jeden z aksjomatów teorii mnogości,
zarówno ZF, jak i GBN:
każdy niepusty zbiór A ma element B, z którym jest rozłączny.
Najprostszą konsekwencją tego aksjomatu jest to, że żaden zbiór C nie może być swoim
elementem: zbiór {C} ma jedyny element C, więc musi być z nim rozłączny:
{C} ∩ C = ∅,
czyli C /
∈ C. Z tego z kolei wynika, że napisy w rodzaju ”N = 3” albo ”2 = {x ∈ R : x
2
=
4}” nie mają sensu w matematyce, bo orzekają, że pewien zbiór jest swoim elementem.
Innymi słowy: tekst zawierający napisy takiego rodzaju nie jest tekstem matematycznym.
aksjomat ufundowania: zob.
aksjomat wycinania: jeden z aksjomatów teorii mnogości, zarówno ZF, jak i GBN, pozwala-
jący tworzyć nowe zbiory z danych zbiorów:
dla każdego zbioru A i każdej własności (warunku, formy zdaniowej) Φ, mającej sens dla
elementów zbioru A istnieje zbiór {t ∈ A : Φ(t)} do którego należą wyłącznie te elementy
zbioru A, które mają własność Φ:
x ∈ {t ∈ A : Φ(t)} ⇔ (x ∈ A ∧ Φ(x)) .
Warunek Φ(t) (ze zmienną t) nazywamy często równaniem ogólnym zbioru {t ∈ A : Φ(t)}.
Oznaczenie zbioru {t ∈ A : Φ(t)} często wypowiada się słowami ”ogół tych t ∈ A, że Φ(t)”,
co nie oznacza, że istnieją specjalne twory, zwane ”ogółami”.
aksjomat zastępowania: zob.
alfa: nazwa pierwszej litery alfabetu greckiego α, A.
b
2
− 4ac: wzór na wyróżnik (nie: deltę) trójmianu kwadratowego ax
2
+ bx + c.
beta: nazwa drugiej litery alfabetu greckiego β, B.
chi: nazwa dwudziestej czwartej litery alfabetu greckiego χ, X.
ciało: Pojęcia ciała (bez nadawania mu nazwy) używał już Evariste Galois (25 X 1811
- 30 V 1832), któy odkrył i sklasyfikował ciała skończone; później podobnie postąpił
B. Riemann (1857), którego interesowały ciała funkcji meromorficznych. Richard W.R.
Dedekinda (1831 - 1916) podał formalną definicję ciała pod nazwą ”dziedzina wymier-
ności”. Nazwa ”Körper ”, ”ciało” pojawiła się podobno po raz pierwszy w ”Teorii Liczb”, P.
G. Lejeune-Dirichleta, jako ”zespół, poczet” albo ”ucieleśnienie” elementów powstających

ALGEBRA LINIOWA I GEOMETRIA 1
9
z operacji wymiernych (dodawanie, odejmowanie, mnożenie, dzielenie). Problem pier-
wszeństwa jest skomplikowany: Dedekind był uczniem Dirichleta, napisał Suplementy do
jego wykładów; w XI Suplemencie (IV wydanie - Braunschweig 1894) używana jest nazwa
”ciało”.
Angielscy matematycy używali krótko łacińskiego odpowiednika ”corpus”, zaś
francuscy matematycy używali pokrewnego ”corps”, co znaczy ”ciało”. Używane teraz po
angielsku słowo ”field ” zapewne wprowadzili amerykańscy algebraicy, którzy początkowo
używali również nazwy ”realm”.
delta: nazwa czwartej litery alfabetu greckiego δ, ∆. Uwaga! To, że wartość wyróżnika
trójmianu kwadratowego zwykle oznacza się literą ∆ nie oznacza, że słowo „delta” jest
nazwą wyróżnika. Słowo „delta” jest nazwą typu ujścia rzeki i typu płatowca samolotu.
Natomiast słowo „delta” nie jest nazwą wzoru na pierwiastki trójmianu kwadratowego
ani metody obliczania tych pierwiastków.
dzeta: nazwa siódmej litery alfabetu greckiego ζ, Z.
epsilon: nazwa szóstej litery alfabetu greckiego ε, E.
eta: nazwa ósmej litery alfabetu greckiego η, H.
fi: nazwa dwudziestej trzeciej litery alfabetu greckiego φ (ϕ), Φ.
funkcja: „odwzorowanie, operacja, przekształcenie, jedno z najważniejszych pojęć matem-
atyki, długo używane bez precyzyjnie sformułowanej definicji; rozumiane intuicyjnie jako
przyporządkowanie elementom jednego zbioru X elementów drugiego zbioru Y tak, że
każdemu elementowi x ∈ X odpowiada dokładnie jedna wartość y ∈ Y . (...) Powstała
więc konieczność sformułowania ogólnej, precyzyjnej definicji. Taką definicję podano na
gruncie teorii mnogości; przez funkcję f odwzorowującą zbiór X w zbiór Y rozumie się
dowolny zbiór par uporządkowanych (x, y), x ∈ X, y ∈ Y (czyli relację w X × Y ) taki, że
dla każdego elementu x ∈ X istnieje dokładnie jeden element y ∈ Y , oznaczany symbolem
f (x) taki, że (x, y) ∈ f . (...) Zbiór X nazywa się dziedziną funkcji f lub zbiorem argu-
mentów funkcji f . (...) Zbiór Y nazywa się przeciwdziedziną funkcji f . Zbiór Y
0
złożony z
tych elementów y ∈ Y , dla których istnieje x ∈ X takie, że y = f (x) , nazywa się zbiorem
wartości f .” (W. Waliszewski i in. (red.), „Encyklopedia szkolna. Matematyka” ,
Wyd. Szkolne i Pedagogiczne, Warszawa 1988).
funkcja odwracalna: funkcja różnowartościowa i na; funkcja f jest odwracalna wtedy i
tylko wtedy, gdy ma funkcję odwrotną.
funkcja odwrotna: „ jeśli funkcja f : X → Y jest różnowartościowa i spełniony jest warunek
f (X) = Y (czyli funkcja f odwzorowuje X na Y ), to wówczas istnieje funkcja g : Y → X
określona następująco: dla dowolnego y ∈ Y wartością g(y) jest jedyny element x ∈ X taki,
że f (x) = y; funkcję g nazywa się funkcją odwrotną do f i oznacza symbolem f
−1
. Funkcja
mająca funkcję odwrotną nazywa się funkcją odwracalną.
Jeśli g = f
−1
, to również
f = g
−1
. Złożenie funkcji wzajemnie odwrotnych f i f
−1
jest funkcją tożsamościową, tzn.

10
MAREK SZYJEWSKI
(f
−1
◦ f )(x) = x, dla każdego x ∈ X.” (W. Waliszewski i in. (red.), „Encyklopedia
szkolna. Matematyka” , Wyd. Szkolne i Pedagogiczne, Warszawa 1988).
gamma: nazwa trzeciej litery alfabetu greckiego γ, Γ.
jota: nazwa dziesitej litery alfabetu greckiego ι, I.
kappa: nazwa jedenastej litery alfabetu greckiego κ; K.
ksi: nazwa piętnastej litery alfabetu greckiego ξ, Ξ.
lambda: nazwa dwunastej litery alfabetu greckiego λ, Λ.
mi: nazwa trzynastej litery alfabetu greckiego µ, M .
ni : nazwa czternastej litery alfabetu greckiego ν, H.
oczywistość: (1) matematyk mówi „to jest oczywiste” gdy umie bez namysłu podać krótki
i łatwy dowód tego, co nazywa oczywistym;
(2) niematematyk mówi „to jest oczywiste” gdy nie ma pojęcia, jak to uzasadnić, ale
wierzy, że to jest prawdą.
odwzorowanie: funkcja.
omega: nazwa dwudziestej szóstej litery alfabetu greckiego ω, Ω.
omikron: nazwa szesnastej litery alfabetu greckiego o, O.
operator: funkcja.
opuszczanie nawiasów: „Jeśli przed nawiasem występuje znak +, to opuszczając nawias
przepisujemy wszystkie wyrazy z nawiasu z tymi samymi znakami. Jeśli przed nawiasem
występuje znak − , to opuszczając nawias przepisujemy wszystkie wyrazy z nawiasu z
przeciwnymi znakami” (podręcznik matematyki do IV klasy szkoły podstawowej) - sfor-
mułowane po raz pierwszy w księdze pierwszej „Arytmetyki” Diofantosa z Aleksandrii
(ok. 250 r.) zasady przekształcania wyrażeń algebraicznych, wynikające z prawa rozdziel-
ności mnożenia względem dodawania i definicji elementu przeciwnego. Uwaga! kreska
ułamkowa też jest nawiasem:
d ·
a + b
c
= d · (a + b) · c
−1
.
pi: nazwa siedemnastej litery alfabetu greckiego π, Π.
pierścień: Nazwa ”pierścień” (”ring ”) jest skrótem nazwy ”Zahlring” wprowadzonej przez D.
Hilberta w 1892 dla pierścienia generowanego przez całkowite liczby wymierne i niewymier-
ność kwadratową η która spełnia równanie η
2
+ Bη + C = 0. Wydaje się, że grupa gen-
erowana przez 1 i η została nazwana ”Zahlring” bo η
2
= −Bη − C, ”skręcając na powrót”
do elementu tej grupy.
posiadać: „[Czasownik nadużywany, często błędnie stosowany zamiast mieć, np. ‘Czy pan
ma bilet’ (a nie: posiada), ‘samochód ma (a nie posiada) cztery koła’]
ALGEBRA LINIOWA I GEOMETRIA 1
11
(1) mieć jakąś rzecz (ziemię, nieruchomość, pieniądze, przedmiot) w swym władaniu, być
właścicielem czego, mieć: ‘Posiadać duży plac budowlany, plantację tytoniu’.
(2) w połączeniu z rzeczownikiem oznaczającym wiadomości, umiejętność: mieć, umieć
opanować co, być wyćwiczonym w czym: ‘Posiadać rozległą wiedzę.’ ’Posiąść tajniki
rzemiosł.’ ”
(S. Skorupka i in. (red.) „Mały słownik języka polskiego”, PWN Warszawa 1969).
Równanie ma rozwiązania lub nie ma rozwiązań, ale na pewno nie posiada rozwiązań, bo
nie może okazać notarialnego aktu własności.
postać: - budowa wyrażenia, typ wzoru ogólnego. Na przykład: ”x jest postaci a + b”
oznacza, że x jest sumą dwóch składników; liczba nieparzysta to liczba postaci 2k − 1 dla
całkowitych k, każda liczba pierwsza postaci 4k + 1 i liczba 2 to wszystkie liczby pierwsze
postaci x
2
+ y
2
, itd. Nie mówimy: ”2 · 2 jest postaci 4”, mówimy ”2 · 2 jest równe 4”, ”2 · 2
równa się 4”.
pożytek z wiedzy: „Wiedziałem, że języki, jakich tam uczą, potrzebne są dla zrozumienia
ksiąg starożytnych; że powab baśni rozbudza umysł; że godne pamięci uczynki, przekazane
przez historię, podnoszą go; i że, czytane z rozeznaniem, pomagają w ukształtowaniu sądu;
że czytanie wszelkich dobrych książek jest niby rozmowa z najgodniejszymi ludźmi minio-
nych wieków, będącymi tych dzieł autorami, ba, i to jest rozmowa przemyślana, w której
odsłaniają nam jedynie swe najcenniejsze myśli; że wymowa zawiera w sobie moc i piękno
nieporównane, a poezja wykwinty i słodycze czarujące; że nauki matematyczne zawier-
ają pomysły bardzo subtelne i zdolne wydatnie posłużyć tak dla zadowolenia ciekawych,
jak dla ułatwienia wszelkich rzemiosł i zmniejszania pracy czowieka; że pisma, traktu-
jące o obyczajach, mieszczą nauki i zachęty do cnoty nader użyteczne; że teologia uczy,
jak zdobywać niebo; że filozofia daje sposób rozprawiana z podobieństwem do prawdy o
wszystkich rzeczach i budzenia podziwu mniej uczonych; że prawo, medycyna i inne nauki
przynoszą zaszczyty i bogactwa tym, którzy je uprawiają; że wreszcie dobrze jest zbadać je
wszystkie, nawet te zabobonne i fałszywe, aby poznać ich prawdziwą wartość i ustrzec się
przed wprowadzeniem przez nie w błąd.” (René Descartes, „Discours de la méthode”;
cytat za: Kartezjusz, „Rozprawa o metodzie”, tłum. Boy, PIW, Warszawa 1980).
W szczególności nie istnieje wiedza bezużyteczna. Natomiast nie należy oceniać wiedzy
pod względem praktycznej przydatności: jedyna naprawdę praktycznie niezbędna do życia
wiedza, to wiedza do której dziurki wkładać jedzenie żeby się nasycić.
przekształcenie: (1) zbioru A w zbiór B - funkcja A → B;
(2) wyrażenia - inne wyrażenie o równej wartości albo równoważne przekształcanemu
wyrażeniu, np.:
• A
0
∪ B
0
jest przekształceniem wyrażenia (A ∩ B)
0
na podstawie prawa de Mor-
gana,
• (x−3)
2
−2 = 0 jest przekształceniem równania x
2
−6x+9−2 = 0 na podstawie
prawa rozdzielności mnożenia względem dodawania.
psi: nazwa dwudziestej piątej litery alfabetu greckiego ψ, Ψ.

12
MAREK SZYJEWSKI
ro: nazwa osiemnastej litery alfabetu greckiego ρ, P .
rozumienie: wbrew nowej modzie językowej „rozumieć” nie jest antonimem „wiedzieć,
umieć”. Nie można rozumieć tego, czego się nie wie. „Cztery są stopnie przyswojenia
reguły:
(1) uczący się wyuczył się reguły na pamięć, przyjąwszy ją na wiarę; jednakże jest w
stanie korzystać z niej, poprawnie stosując ją w praktyce (stadium mechanicznego
przyswojenia);
(2) uczący się wypróbował regułę w najprostszych przypadkach, w których, jak się przekonał,
daje ona poprawny rezultat (stadium indukcyjnego rozumienia);
(3) uczący się zrozumiał dowód reguły (stadium świadomego zrozumienia);
(4) uczący się w pełni przyswoił sobie reguę i tak jest jej pewien, że nie pozostało w nim
śladu wątpliwości co do jej prawdziwości (stadium wewnętrznego rozumienia)”
(B. Spinoza „Tractatus de Intellectus Emandatione”; cytat i nazwy poziomów -
za: G. Polya, „Mathematical discovery”, John Wiley & Sons Inc. NY - London 1962).
Wydaje się, że można dodać jeszcze dwa stopnie:
5. uczący się widzi, które twierdzenia i w jakim stopniu wykorzystują dane twierdze-
nie, a także widzi do jakich sprzeczności doprowadziłaby nieprawdziwość twierdzenia;
umie odróżnić rolę różnych założeń i pokazać na przykadach, że są one niezbędne;
umie rozpoznać możliwe zastosowania twierdzenia i poznać sytuacje, w których zas-
tosowanie twierdzenia nie da rezultatów;
6. uczący się umie obejść się bez użycia twierdzenia osiągając te same albo lepsze rezul-
taty łatwiej i szybciej.
Osoby, które uznają tylko następujące stopnie :
-1. nic
0. zapamiętanie zapisu twierdzenia, dowodu, rozumowania tak, aby wyrecytować zapis
bez większych pomyłek i luk
nie mają nic wspólnego ani z rozumieniem, ani z uczeniem się i tutaj są na niewłaściwym
miejscu.
równość zbiorów: W teorii mnogości równość podstawowych obiektów (czyli zbiorów) defini-
uje się za pomocą relacji należenia ∈. Definicja jest następująca:
A = B ⇔ ∀
x
[x ∈ A ⇔ x ∈ B].
Uwaga. Często powtarzane ”poglądowe” sformułowanie - ”zbiory są równe gdy mają te
same elementy” - nie nadaje się na definicję, bo nie daje sposobu sprawdzania, czy równość
zbiorów zachodzi. Na przykład gdy trzeba sprawdzić równość {0, 1} = {1, 0}, powstaje
problem: czy 0 i 1 są ”te same”? Kiedy należy zakończyć sprawdzanie, czy elementy są ”te
same”? Natomiast definicja równości nie sprawia takich problemów: oba zdania x ∈ {0, 1}
i x ∈ {1, 0} są prawdziwe gdy x = 0 i gdy x = 1, oraz oba są fałszywe, gdy x 6= 0 ∧ x 6= 1.
sigma: nazwa dziewiętnastej litery alfabetu greckiego σ, Σ.
tau: nazwa dwudziestej litery alfabetu greckiego τ , T .

ALGEBRA LINIOWA I GEOMETRIA 1
13
theta: nazwa dziewiątej litery alfabetu greckiego θ (ϑ), Θ.
transformacja: (1) funkcja.
(2) przekształcenie
twierdzenie: matematyka polega na dowodzeniu i wykorzystywaniu twierdzeń. Twierdzenia
mają - oprócz zapisu (wypowiedzi) także znaczenie (treść); bez znajomości znaczenia
twierdzenia trudno je wykorzystać i nie można mówić o zrozumieniu twierdzenia.
(1) TWIERDZENIA POSTACI Φ ⇒ Ψ
Znaczenie: zdanie Φ ⇒ Ψ zachodzi (jest prawdziwe) wtedy i tylko wtedy, gdy
zdanie Ψ wynika (jest wnioskiem) ze zdania Φ, czyli ilekroć zdanie Φ zachodzi (jest
prawdziwe), to również zdanie Ψ zachodzi (jest prawdziwe); zdanie Φ ⇒ Ψ nie za-
chodzi (jest fałszywe) wtedy i tylko wtedy, gdy zdanie Φ zachodzi (jest prawdziwe) a
zdanie Ψ nie zachodzi (jest fałszywe)
Korzystanie: jeśli wiadomo, że zdanie Φ zachodzi (jest prawdziwe), to z twierdzenia
Φ ⇒ Ψ wnioskujemy, że zdanie Ψ zachodzi (jest prawdziwe) (reguła odrywania); jeśli
wiadomo, że zdanie Ψ nie zachodzi (jest fałszywe), to z twierdzenia Φ ⇒ Ψ wniosku-
jemy, że zdanie Φ nie zachodzi (jest fałszywe).
Dowodzenie:
1. sposób (wprost): zakładamy, że zdanie Φ zachodzi i wnioskujemy z tego założenia,
że zachodzi zdanie Ψ;
2. sposób (niewprost): zakładamy, że zachodzi zdanie ∼ Ψ (że zdanie Ψ nie za-
chodzi), i wnioskujemy, że zdanie ∼ Φ zachodzi (zdanie Φ nie zachodzi); zatem jeśli
Φ zachodzi, to Ψ zachodzi.
(2) TWIERDZENIA POSTACI Φ ⇔ Ψ
Znaczenie: zdanie Φ ⇔ Ψ zachodzi (jest prawdziwe) wtedy i tylko wtedy, gdy zda-
nia Φ i Ψ mają tę samą wartość logiczną; zdanie Φ ⇔ Ψ nie zachodzi (jest fałszywe)
wtedy i tylko wtedy, gdy zdania Φ, Ψ mają różne wartości logiczne.
Korzystanie: jeśli wiadomo, że jedno ze zdań Φ, Ψ zachodzi (jest prawdziwe) to
wnioskujemy, że drugie też zachodzi (jest prawdziwe); jeśli wiadomo, że jedno z tych
zdań nie zachodzi (jest fałszywe) to wnioskujemy, że drugie z nich również nie za-
chodzi (jest fałszywe); ze zdania Φ ⇔ Ψ wynika każde ze zdań Φ ⇒ Ψ, Ψ ⇒ Φ,
Ψ ⇔ Φ oraz to, że jeśli zdanie Φ jest zdaniem składowym zdania złożonego Λ, to za-
stępując dowolne wystąpienie zdania Φ w zdaniu Λ przez zdanie Ψ uzyskamy zadnie
równoważne zdaniu Λ, np. jeśli Λ = Φ ∧ Γ oraz Φ ⇔ Ψ, to Λ ⇔ (Ψ ∧ Γ) (reguła
ekstensjonalności).
Dowodzenie:
1. sposób: należy udowodnić każdą z (łatwiejszych) równoważności Φ ⇔ Φ
1
, Φ
1
⇔
Φ
2
, . . ., Φ
n−1
⇔ Φ
n
, Φ
n
⇔ Ψ (tzw. przejścia równoważnościowe);
2. sposób: należy udowodnić obie implikacje Φ ⇒ Ψ, Ψ ⇒ Φ.
(3) TWIERDZENIA POSTACI ∀
x∈X
[Φ(x)]
Znaczenie: zdanie ∀
x∈X
[Φ(x)] zachodzi (jest prawdziwe) wtedy i tylko wtedy, gdy

14
MAREK SZYJEWSKI
każdy element x zbioru X ma własnośćΦ(x) (spełnia formę zdaniową Φ(x)); zdanie
to nie zachodzi gdy choćjeden element zbioru X nie spełnia warunku Φ(x).
Korzystanie: jeśli dane jest wyrażenie t przyjmujące wartości w zbiorze X i zmienna
x w wyrażeniu Φ(x) nie znajduje się w zasięgu żadnego kwantyfikatora wiążącego
zmienną występującą w t, to wnioskujemy, że Φ(t) zachodzi; jeśli Φ(x) jest implikacją
Ψ ⇒ Λ(x) i x nie jest zmienną wolną w Ψ, to wnioskujemy zdanie Ψ ⇒ ∀
x∈X
[Λ(x)];
Dowodzenie: dla każdego (dla dowolnego) elementu x zbioru X dowodzimy zdania
Φ(x).
(4) TWIERDZENIA POSTACI ∃
x∈X
[Φ(x)]
Znaczenie: zdanie ∃
x∈X
[Φ(x)] zachodzi (jest prawdziwe) wtedy i tylko wtedy, gdy
w zbiorze X istnieje element spełniający warunek Φ(x); zdanie to nie zachodzi (jest
fałszywe) wtedy i tylko wtedy, gdy zachodzi zdanie ∀
x∈X
[∼ Φ(x)].
Korzystanie: weźmy pod uwagę taki element a zbioru X, że Φ(a).
Dowodzenie:
1. sposób (efektywny): należy wskazać lub zbudować element a zbioru X taki, że
zachodzi Φ(a);
2.
sposób (nieefektywny): należy wykazać, że z fałszywości danego twierdzenia
wynika zaprzeczenie innego, już udowodnionego twierdzenia.
układ współrzędnych: na płaszczyźnie w geometrii euklidesowej - układ dwóch osi liczbowych
wzajemnie do siebie prostopadłych i mających wspólny początek (podręcznik matematyki
do VII klasy szkoły podstawowej).
Kartezjusz zauważył, że prosta konstrukcja geometryczna na płaszczyźnie z wybranym
układem współrzędnych pozwala przyporządkować każdemu punktowi płaszczyzny uporząd-
kowaną parę liczb rzeczywistych, co określa wzajemnie jednoznaczne odwzorowanie zbioru
punktów płaszczyzny na zbiór R
2
= R × R uporządkowanych par liczb rzeczywistych.
Osie układu współrzędnych nazywamy odpowiednio osią odciętych i osią rzędnych; ich
punkt przecięcia jest punktem 0 każdej z osi.
Konstrukcja polega na przeprowadzeniu przez dany punkt prostych równoległych do każdej
z osi; punkt przecięcia z drugą osią wyznacza współrzędną: punkt przecięcia z osią od-
ciętych - pierwszą współrzędną, a punkt przecięcia z osią rzędnych - drugą współrzędną
danego punktu.
Ogólnie układem współrzędnych nazywamy „różnowartościowe odwzorowanie przyporząd-
kowujące punktom zbioru, np. prostej, płaszczyzny lub przestrzeni, ciągi liczb nazywane
współrzędnymi tych punktów w danym układzie współrzędnych.” (W. Waliszewski i in.
(red.), „Encyklopedia szkolna. Matematyka” , Wyd. Szkolne i Pedagogiczne, War-
szawa 1988). Często używane układy współrzędnych mają nazwy własne, np.: kartez-
jański układ współrzędnych, układ współrzędnych biegunowych, układ współrzędnych
walcowych, układ współrzędnych sferycznych.
Układ współrzędnych służy do przyporządkowania punktom ciągów liczb. Układ współrzęd-
nych nie służy do zaznaczania punktów - do tej czynności służy ołówek.
ALGEBRA LINIOWA I GEOMETRIA 1
15
v: dwudziesta pierwsza (dwudziesta druga) litera alfabetu łacińskiego, pocztkowo oznaczała
również głoskę u. Wartość fonetyczna np. w angielskim: w , w niemieckim: f , w pol-
skim: nie występuje (o czym nie wiedzieli pomysłodawcy znanego gestu). Nazwa - np. w
angielskim: wi, w niemieckim: fau; w polskim: we.
ypsylon: nazwa dwudziestej pierwszej litery alfabetu greckiego υ, Y .
zad: u zwierząt: tylna część ciała, pośladki : „ciągnął lejce, aż konie siadły na zadach” (S.
Skorupka i in. (red.) „Mały słownik języka polskiego”, PWN Warszawa 1969).
zad.: skrót używany przez osoby, dla których napisanie siedmioliterowego słowa ”zadanie”
jest zbyt trudne lub bardzo męczce (np. przez uczniów pierwszej klasy szkoły podsta-
wowej).
zaznaczanie punktu: czynność przy wykonywaniu rysunku. Do zaznaczania punktu służy
ołówek (kreda, długopis itd.), a nie układ współrzędnych. Punkt płaszczyzny nie zmienia
w czasie zaznaczania go na rysunku: jest taki sam przed i po zaznaczeniu.
zeta: nazwa siódmej litery alfabetu greckiego ζ, Z
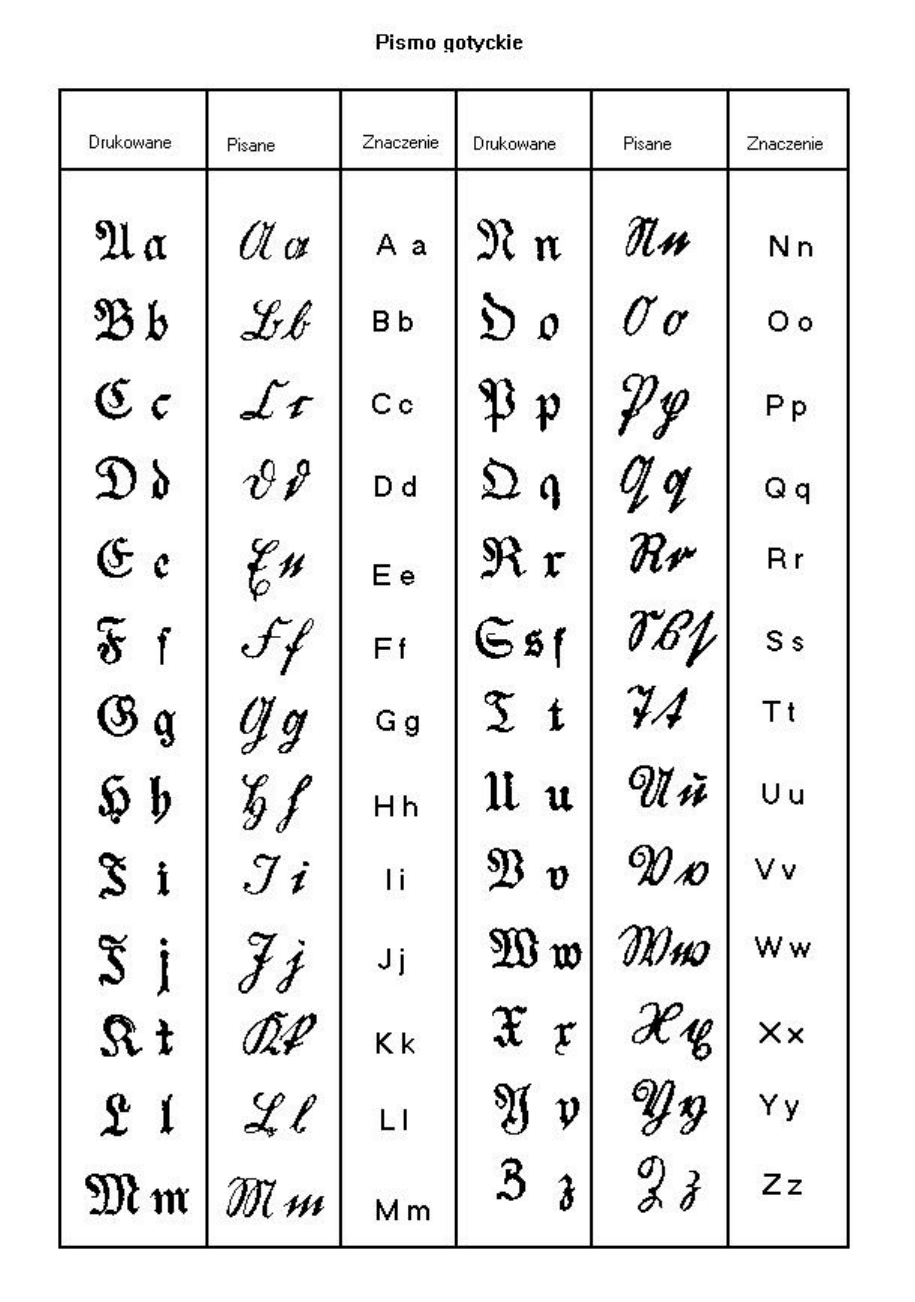
§ 5. Alfabet grecki
Litera
Nazwa
Litera
Nazwa
Litera
Nazwa
A, α
alfa
a
I, ι
jota
i
P, ρ
ro
r
B, β
beta
b (w)
K, κ
kappa
k
Σ, σ
sigma
s
Γ, γ
gamma
g
Λ, λ
lambda
l
T, τ
tau
t
∆, δ
delta
d
M, µ
mi
m
Y, υ
ypsilon
y/u
E, ε ()
epsilon
e
N, ν
ni
n
Φ, φ (ϕ)
fi
f
Z, ζ
dzeta (zeta)
dz (z)
Ξ, ξ
ksi
x
X, χ
chi
ch
H, η
eta
e
O, o
omikron
o
Ψ, ψ
psi
ps
Θ, θ (ϑ)
theta
th
Π, π
pi
p (b)
Ω, ω
omega
¯
o

ALGEBRA LINIOWA I GEOMETRIA 1
17
2. Zbiór zadań
§ 6. Przestrzenie wektorowe
6.1. Wykazać, że V = C ze zwykłym dodawaniem jako dodawaniem wektorów i operacją mnożenia przez
skalar
∗
:
C × C → C,
(z, v)
7→
z ∗ v := z · v
jest przestrzenią liniową
nad ciałem liczb zespolonych C.
6.2. Niech V będzie zbiorem liczb rzeczywistych dodatnich, a dodawanie wektorów niech będzie mnożeniem
liczb. Operację mnożenia przez liczby rzeczywiste określimy następująco:
· : R × V → V,
(a, v) 7→ v
a
Wykazać, że wyżej opisana struktura algebraiczna jest przestrzenią liniową nad ciałem liczb rzeczy-
wistych R.
6.3. Niech K będzie dowolnym ciałem oraz niech V = K
∞
(zbiór wszystkich nieskończonych ciągów
elementów ciała K). Określmy działania dodawania wektorów oraz mnożenia wektorów przez
skalary z ciała K następująco:
[a
1
, a
2
, . . .] + [b
1
, b
2
, . . .]
:
= [a
1
+ b
1
, a
2
+ b
2
, . . .],
a · [a
1
, a
2
, . . .]
:
= [aa
1
, aa
2
, . . .].
Pokazać, że wyżej zdefiniowana struktura algebraiczna jest przestrzenią wektorową nad ciałem K.
6.4. Niech A będzie niepustym zbiorem oraz niech K będzie dowolnym ciałem. Oznaczmy symbolem K
A
zbiór wszystkich funkcji A → K. Sumą funkcji f : A → K oraz funkcji g : A → K nazywamy
funkcję f + g : A → K taką, że (f + g)(a) = f (a) + g(a) dla każdego a ∈ A. Iloczynem funkcji
f : A → K przez skalar x z ciała K nazywamy funkcję xf : A → K taką, że (xf )(a) = xf (a) dla
każdego a ∈ A. Pokazać, że tak zdefiniowana struktura algebraiczna jest przestrzenią liniową nad
ciałem K.
6.5. Oznaczmy symbolem K[X] zbiór wszystkich wielomianów zmiennej X o współczynnikach z ciała K.
Sprawdzić, że z działaniami dodawania wielomianów i mnożenia wielomianu przez elementy ciała
K, zbiór K[X] jest przestrzenią wektorową nad ciałem K.
6.6. Oznaczmy symbolem K(X) zbiór wszystkich funkcji wymiernych zmiennej X o wspóczynnikach z
ciała K . Sprawdzić, że z działaniami dodawania funkcji wymiernych i mnożenia funkcji wymiernej
przez element ciała K zbiór K(X) jest przestrzenią wektorow nad ciałem K.
6.7. Macierzą
o m wierszach i n kolumnach nad ciałem K nazywamy układ (prostokątną tabliczkę) mn
elementów ciała K (które nazywamy elementami albo współczynnikami macierzy) ułożonych w
5
Pojęcie przestrzeni wektorowej (przestrzeni liniowej) aksjomatycznie zdefiniował Hermann Günter Grassmann
(5 IV 1809, Szczecin - 26 IX 1916, Szczecin), jako podsumowanie doświadczeń matematyków przynajmniej od
czasów Gaussa.
6
Pojęcie macierzy wprowadzili angielscy matematycy: William Rowan Hamilton (1805 - 1865), Arthur Cayley
(1821 - 1895) i John J. Sylvester (1814 - 1897) w latach 40-tych XIX w.
18
MAREK SZYJEWSKI
m wierszach i w n kolumnach. Element macierzy oznaczamy podając numer wiersza i numer
kolumny, w których się on znajduje. W macierzach zmiennych na ogół elementy oznaczamy tą
samą literą z numerem wiersza i numerem kolumny jako indeksami. Macierze zapisujemy tu w
nawiasie kwadratowym
. Na przykład dla n = m = 2 równość
[a
ij
] =
"
1
2
3
4
#
oznacza, że a
11
= 1, a
12
= 2, a
21
= 3, a
22
= 4. Zbiór wszystkich macierzy o m wierszach i n
kolumnach nad ciałem K oznaczamy symbolem K
m
n
.
Sumą macierzy A = [a
ij
] i macierzy B = [b
ij
] nazywamy macierz A + B taką, że A + B = [c
ij
]
wtedy i tylko wtedy, gdy dla każdych i, j zachodzi równość c
ij
= a
ij
+ b
ij
. Iloczynem macierzy
A = [a
ij
] przez element a ciała K nazywamy macierz aA tak, że aA = [c
ij
] wtedy i tylko wtedy,
gdy dla każdych i, j zachodzi równość c
ij
= aa
ij
. Wykazać , że K
m
n
z działaniami dodawania
macierzy i mnożenia macierzy przez element ciała K jest przestrzenią wektorową nad K.
6.8. Macierz S = [s
ij
] ∈ K
n
n
nazywamy macierzą symetryczną, gdy jej elementy s
ij
spełniają warunki:
s
ij
= s
ji
dla każdych i, j. Macierz A = [a
ij
] ∈ K
n
n
nazywamy macierzą antysymetryczną, gdy
jej elementy a
ij
spełniają warunki: a
ij
= −a
ji
dla każdych i, j. Sprawdzić, że każdy ze zbiorów:
zbiór S
n
wszystkich macierzy symetrycznych należcych do K
n
n
i zbiór A
n
wszystkich macierzy
antysymetrycznych należących do K
n
n
, z działaniami dodawania macierzy i mnożenia macierzy
przez skalar, jest przestrzenią wektorow nad ciałem K.
6.9. Niech A będzie dowolnym zbiorem, a P (A) niech będzie zbiorem wszystkich jego podzbiorów. Dzi-
ałanie dodawania w zbiorze P (A) definiujemy następująco: B ÷ C = (B\C) ∪ (C\B). Mnożenie
elementów P (A) przez elementy ciała Z
2
definiujemy w oczywisty sposób: 0 · B = ∅, 1 · B = B.
Sprawdzenie łączności działania ÷ jest dość kłopotliwe.
(a) Zakładając, że działanie ÷ jest łączne, sprawdzić, że spełnione są również pozostałe aksjo-
maty przestrzeni liniowej.
(b) * Wykazać łączność działania ÷.
6.10. Jaki warunek musi spełniać dodawanie w grupie addytywnej A, żeby mnożenie elementów tej grupy
przez elementy ciała Z
2
zdefiniowane następująco: 0 · a = 0, 1 · a = a było rozdzielne względem
dodawania?
6.11. Niech V = C
4
, U = {(z
1
, z
2
, z
3
, z
4
) ∈ V : z
1
= z
2
= 0}. Wektory dodawać będziemy w zwykły
sposób natomiast mnożenie przez skalary definiujemy na cztery różne sposoby:
(a) zα = θ dla z ∈ C oraz α ∈ V .
(b) zα = α dla z ∈ C oraz α ∈ V .
(c) zα = (Re z)α dla z ∈ C oraz α ∈ V .
(d) zα =
(
zα gdy z ∈ C i α ∈ U
zα gdy z ∈ C i α /
∈ U
.
Sprawdzić, że w każdym z czterech powyższych przykładów dokładnie jeden z aksjomatów przes-
trzeni liniowej nie jest spełniony.
*Jaki wniosek związany z wzajemną zależnością aksjomatów przestrzeni liniowej można wyciągnąć
z tego zadania ?
6.12. *Wykazać, że przemienność dodawania wynika z pozostałych aksjomatów przestrzeni wektorowej.
7
Zwykle macierze zapisuje się w nawiasie okrągłym; dość często używane są również podwójne pionowe kreski;
nawias kwadratowy wybrano ze względów typograficznych.

ALGEBRA LINIOWA I GEOMETRIA 1
19
§ 7. Podprzestrzenie przestrzeni wektorowych.
7.1. Pokazać, że jeśli U jest podprzestrzenią przestrzeni liniowej V nad ciałem K, to U jest również
przestrzenią liniową nad K.
7.2. Zbadać, które z następujących podzbiorów przestrzeni K
4
są podprzestrzeniami wektorowymi:
(a) U = {[t, t + 1, 0, 1] : t ∈ K},
(b) U = {[t, u, t + u, t − u] : t, u ∈ K},
(c) U = {[tu, u, t, 0] : t, u ∈ K},
(d) U = {[x, y, z, t] : x + y − z = 0},
(e) U = {[x, y, z, t] : xy = 0},
(f ) U = {t[1, 0, 1, 0] + u[0, −1, 0, 1] : t, u ∈ K}.
7.3. Zbadać, które z następujących podzbiorów przestrzeni R
4
są podprzestrzeniami liniowymi:
(a) U = {[t, u, t + u, t − u] : t ≤ u},
(b) U = {[t, u, t, 0] : tu ≥ 0},
(c) U = {[x, y, z, t] : x, y, z, t ∈ Q}.
7.4. Niech R
∞
będzie przestrzenią ciągów elementów ciała R (zob. zadanie
, str.
). Zbadać, które
spośród następujących zbiorów są podprzestrzeniami wektorowymi przestrzeni R
∞
:
(a) U
1
= {[a
1
, a
2
, . . .] : a
i+1
= a
i
+ a
i−1
dla każdego i = 2, 3, . . .};
(b) U
2
= {[a
1
, a
2
, . . .] : a
i
=
1
2
(a
i−1
+ a
i+1
) dla każdego i = 2, 3, . . .};
(c) zbiór wszystkich ciągów [a
1
, a
2
, . . .], których prawie wszystkie wyrazy (wszystkie wyrazy z
wyjątkiem co najwyżej skończonej liczby) są równe zero;
(d) zbiór wszystkich ciągów ograniczonych.
7.5. Niech A ⊂ R będzie zbiorem niepustym oraz niech V = R
A
będzie przestrzenią funkcji A → R
(zob. zadanie
, str.
). Zbadać, które z następujących podzbiorów przestrzeni R
A
są pod-
przestrzeniami liniowymi:
(a) zbiór wszystkich funkcji parzystych, gdy A = R.
(b) zbiór wszystkich funkcji nieparzystych, gdy A = R.
(c) zbiór wszystkich funkcji rosnących.
(d) zbiór wszystkich funkcji monotonicznych.
(e) U = {f ∈ V : f (0) = f (1)} , gdy A = [0, 1].
(f ) U = {f ∈ V : f (x) = 0 dla każdego x ∈ B}, gdy B ⊂ A i B 6= A.
7.6. Sprawdzić, które z określonych podzbiorów przestrzeni wielomianów K[X] nad ciałem K są pod-
przestrzeniami wektorowymi:
(a) U = {F ∈ K[X] : F (−1) = 0},
(b) U = {F ∈ K[X] : F (0) · F (1) = 0},
(c) K[X]
10
= {F ∈ K[X] : stF ≤ 10},
(d) U = {F ∈ K[X] : stF = 10}.
7.7. Zbadać, które z następujących podzbiorów przestrzeni R
2
2
są podprzestrzeniami liniowymi:
(a)
U = {
"
a
−b
b
a
#
: a, b ∈ K},
(b)
U = {
"
a
b
0
c
#
: a + b + c = 0},
(c)
U = {
"
a
0
0
b
#
: ab = 0}.
7.8. Wyznaczyć wszystkie podprzestrzenie przestrzeni
(a) Z
2
2
;
(b) Z
2
3
;
(c) Z
3
2
.
7.9. Pokazać, że jeśli U oraz W są podprzestrzeniami przestrzeni liniowej V , to U ∪ W jest podprzestrzenią
przestrzeni V wtedy i tylko wtedy, gdy U ⊂ W lub W ⊂ U .
7.10. Wykazać, że:

20
MAREK SZYJEWSKI
(a) Suma U
1
+ · · · + U
k
podprzestrzeni przestrzeni liniowej V jest podprzestrzeni przestrzenią
V .
(b) V = U
1
⊕ · · · ⊕ U
k
⇔ każdy wektor v ∈ V ma jednoznaczne przedstawienie w postaci
v = u
1
+ · · · + u
k
, gdzie u
i
∈ U
i
dla i = 1, 2, . . . , k.
7.11. Niech V = R
R
(zob. zadanie
, str.
). Zbiór funkcji nieparzystych oznaczymy literą N, natomiast
zbiór funkcji parzystych - literą P. Pokazać, że N oraz P są podprzestrzeniami przestrzeni V oraz
że V = N ⊕ P. Przedstawić funkcję f daną wzorem
f (x) = a
n
x
n
+ · · · + a
1
x + a
0
w postaci sumy funkcji parzystej i funkcji nieparzystej.
7.12. Niech V będzie przestrzenią liniową oraz niech B ⊂ A. Oznaczmy U
B
= {f ∈ V
A
: f (a) = θ dla
a ∈ B}. Pokazać, że U
B
jest podprzestrzenią przestrzeni V
A
. Dla jakich podzbiorów B oraz C
zbioru A zachodzi równość V
A
= U
B
+ U
C
, a dla jakich równość V
A
= U
B
⊕ U
C
?
7.13. Sprawdzić, czy K
n
n
= S
n
⊕ A
n
(por. zadanie
str.
7.14. W zbiorze Z
6
wyróżnimy dwa podzbiory: U = {0, 2, 4} oraz W = {0, 3}.
Pokazać, że U jest
przestrzenią liniową nad Z
3
i W jest przestrzenią liniową nad ciałem Z
2
, Z
6
= U +W , U ∩W = {0}.
Czy Z
6
jest sumą prostą przestrzeni liniowych U i W ?
7.15. Sprawdzić, że podzbiór
0
0
0
,
1
2
1
,
2
1
2
⊂ Z
3
3
jest podprzestrzenią liniową, a podzbiór
0
0
0
,
1
2
1
,
2
1
2
⊂ Q
3
nie jest podprzestrzenią.
7.16. (Modularność kraty podprzestrzeni ) Niech U
1
, U
2
, U
3
będą podprzestrzeniami przestrzeni wektorowej
V . Udowodnić, że
(a) U
1
+ (U
2
∩ U
3
) ⊂ (U
1
+ U
2
) ∩ (U
1
+ U
3
),
(b) (U
1
∩ U
2
) + (U
1
∩ U
3
) ⊂ U
1
∩ (U
2
+ U
3
),
(c) (U
1
∩ U
2
) + (U
2
∩ U
3
) + (U
3
∩ U
1
) ⊂ (U
1
+ U
2
) ∩ (U
2
+ U
3
) ∩ (U
3
+ U
1
),
(d) (U
1
∩ U
2
) + (U
1
∩ U
3
) = U
1
∩ (U
2
+ (U
1
∩ U
3
)),
(e) jeśli U
1
⊂ U
3
, to U
1
+ (U
2
∩ U
3
) = (U
1
+ U
2
) ∩ U
3
.
7.17. (Niedystrybutywność kraty podprzestrzeni ) Podaj przykład podprzestrzeni U
1
, U
2
, U
3
przestrzeni R
2
dla których
(a) U
1
+ (U
2
∩U
3
) 6= (U
1
+ U
2
) ∩ (U
1
+ U
3
),
(b) (U
1
+ U
2
) ∩ U
3
6= (U
1
∩U
3
) + (U
1
∩U
3
).
7.18. Wykazać, że następujące pary przestrzeni wektorowych są izomorficzne:
(a) U
1
⊕ U
2
i U
1
× U
2
,
(b) U
1
⊕ U
2
⊕ · · · ⊕ U
k
i U
1
× U
2
× · · · × U
k
,
(c) (U
1
+ U
2
) / (U
1
∩ U
2
) i U
1
/ (U
1
∩ U
2
) × U
2
/ (U
1
∩ U
2
),
gdzie U
1
, U
2
, . . . , U
k
są podprzestrzeniami przestrzeni linowej V .
7.19. Dla funkcji f : R
2
→ R:
(a) f ([
x
y
]) = x,
(b) f ([
x
y
]) = y,
(c) f ([
x
y
]) = x + 2y,
(d) f ([
x
y
]) = 2x − 3y
wyznaczyć wszystkie i narysować kilka przykładowych zbiorów f
−1
(a) dla a ∈ R. Sprawdzić, czy
ALGEBRA LINIOWA I GEOMETRIA 1
21
te zbiory są warstwami względem pewnej podprzestrzeni i wyznaczyć tę podprzestrzeń. Wyznaczyć
warstwę f
−1
(a) + f
−1
(b).
7.20. Dla funkcji f : R
3
→ R, f(
h
x
y
z
i
) = x + y + z + 1 wyznaczyć wszystkie zbiory f
−1
(a) dla a ∈ R.
Sprawdzić, czy te zbiory są warstwami względem pewnej podprzestrzeni i wyznaczyć tę pod-
przestrzeń. Wyznaczyć warstwę f
−1
(a) + f
−1
(b).
7.21. Podprzestrzeń U < V nazywamy podprzestrzenią maksymalną gdy jest ona elementem maksy-
malnym rodziny podprzestrzeni właściwych przestrzeni V :
U 6= V,
U < W < V ⇒ (U = W lub W = V ).
(a) Wykazać, że każda niezerowa przestrzeń wektorowa ma podprzestrzenie maksymalne.
(b) Niech v 6= θ będzie niezerowym wektorem z przestrzeni V . Wykazać, że rodzina {U < V :
v /
∈ U } ma elementy maksymalne. Wykazać, że są one podprzestrzeniami maksymalnymi.
§ 8. Kombinacje liniowe
8.1. Sprawdzić, czy wektory α oraz β są kombinacjami liniowymi układu A wektorów przestrzeni R
4
, jeżeli
(a) A = (
1
1
1
−1
,
2
1
1
1
,
5
3
2
0
), α =
9
6
5
−1
, β =
9
6
5
0
.
(b) A = (
1
1
1
−1
,
2
1
1
1
,
5
3
2
0
,
1
0
0
2
), α =
9
6
5
−1
, β =
9
6
5
0
.
Czy zapis wektora α w postaci kombinacji liniowej układu A jest jednoznaczny?
8.2. Dla jakiej liczby zespolonej c ∈ C wektor
1
i
i
jest kombinacją liniową wektorów
c
−1 + i
1 + i
oraz
i
−1
−c
przestrzeni C
3
?
8.3. Pokazać, że jeśli U
1
= lin(α
1
, α
2
, . . . , α
k
), U
2
= lin(β
1
, β
2
, . . . , β
l
), to
U
1
+ U
2
= lin(α
1
, α
2
, . . . , α
k
, β
1
, β
2
, . . . , β
l
).
8.4. Sprawdzić, czy układ (
i
−1
1
,
2
i
1
,
1
3
i
) wektorów przestrzeni C
3
jest liniowo niezależny
Przedstawić wektor
2
3
1 + 2i
jako ich kombinację liniową.
8
Pojęcie liniowej niezależności wektorów pochodzi od Grassmanna.

22
MAREK SZYJEWSKI
8.5. Sprawdzić, że każda kombinacja liniowa
x
1
x
2
x
3
x
4
wektorów
i
1
−i
−1
,
i
−i
−1
1
,
1
0
0
−1
z przestrzeni
C
4
spełnia warunek x
1
+ x
2
+ x
3
+ x
4
= 0 , a nie każda spełnia warunek |x
4
| ≤ 2.
8.6. Znaleźć taki wektor
x
1
x
2
x
3
przestrzeni Z
3
2
, aby wektory
x
1
x
2
x
3
,
1
0
1
,
1
1
1
były liniowo nieza-
leżne. Ile rozwiązań ma to zadanie?
8.7. Zbiór C liczb zespolonych z działaniami dodawania liczb zespolonych i mnożenia liczb zespolonych
przez liczby rzeczywiste jest przestrzenią wektorową nad ciałem liczb rzeczywistych R. Oznaczamy
ją symbolem C
R
. Sprawdzić, że każde trzy wektory z C
R
są liniowo zależne.
8.8. Sprawdzić, czy układ wektorów (α
1
, . . . , a
n
) przestrzeni K
4
jest liniowo zależny, jeżeli
(a) K = Z
7
, α
1
=
1
2
3
1
, α
2
=
4
1
5
4
, α
3
=
2
1
3
4
, α
4
=
5
4
2
2
.
(b) K = R, α
1
=
1
2
3
1
, α
2
=
4
1
5
4
, α
3
=
2
1
3
4
, α
4
=
6
3
10
5
.
(c) K = C, α
1
=
1
i
3
−i
, α
2
=
4
1
5
4
, α
3
=
4 + i
0
5 + 3i
5
, α
4
=
5
2i
i
2
.
(d) K = Z
5
,
1
2
3
1
, α
2
=
4
1
5
4
, α
3
=
2
1
3
4
, α
4
=
5
4
2
2
.
Jeżeli to możliwe, przedstawić jeden z wektorów tego układu jako kombinację liniową pozostałych.
8.9. Wykazać, że wektory α
1
, α
2
, . . . α
n
są linowo niezależne wtedy i tylko wtedy, gdy dla dowolnych
skalarów a
1
, a
2
, . . . a
n
i b
1
, b
2
, . . . , b
n
z równości a
1
α
1
+ a
2
α
2
+ · · · + a
n
α
n
= b
1
α
1
+ b
2
α
2
+ · · · + b
n
α
n
wynika, że a
1
= b
1
, a
2
= b
2
, ..., a
n
= b
n
. Wyjaśnić, jaki związek ma ten fakt z pytaniem, zadanym
w zadaniu
8.10. Pokazać, że niezerowe wektory α
1
, α
2
, . . . α
k
są liniowo niezależne wtedy i tylko, gdy lin(α
1
, . . . , α
k
) =
lin(α
1
) ⊕ · · · ⊕ lin(α
k
).
8.11. Zbiór R liczb rzeczywistych z działaniami dodawania i mnożenia przez liczby wymierne jest przestrzenią
wektorową nad ciałem Q liczb wymiernych. Oznaczamy ją symbolem R
Q
. Sprawdzić, że 1,
√
2,
√
3
są liniowo niezależnymi wektorami przestrzeni R
Q
.
8.12. Niech K będzie ciałem, a B ⊂ A zbiorami. Dla funkcji f ∈ K
A
oznaczmy f |
B
element K
B
taki,
że dla każdego x ∈ B zachodzi równość: (f |
B
)(x) = f (x). Funkcję f |
B
nazywamy ograniczeniem

ALGEBRA LINIOWA I GEOMETRIA 1
23
funkcji f do podzbioru B. Jaką prawdziwą implikację można utworzyć ze zdań : ”f
1
, f
2
, . . . , f
n
są
liniowo zależne w K
A
”, ”f
1
|
B
, f
2
|
B
, . . . , f
n
|
B
są liniowo zależne w K
B
”? Jaką prawdziwą implikację
można utworzyć ze zdań : ”f
1
, f
2
, . . . , f
n
są liniowo niezależne w K
A
”, ”f
1
|
B
, f
2
|
B
, . . . , f
n
|
B
są
liniowo niezależne w K
B
” ?
8.13. Sprawdzić, czy f
1
, f
2
, f
3
są liniowo niezależne w R
R
, jeżeli
(a) f
1
(x) = 1, f
2
(x) = sin x, f
3
(x) = sin 2x dla x ∈ R,
(b) f
1
(x) = 1, f
2
(x) = sin
2
x , f
3
(x) = cos 2x dlax ∈ R.
8.14. Sprawdzić, czy 1, X, X
2
, . . . , X
n
są liniowo niezależne w przestrzeni wektorowej K[X]. Sprawdzić,
czy dla danego a ∈ K, wielomiany 1, X − a, (X − a)
2
, . . . , (X − a)
n
są liniowo niezależne w tej
samej przestrzeni.
8.15. Sprawdzić, czy f
1
, f
2
, . . . , f
n
są liniowo niezależne w R
R
, jeżeli f
i
(x) = |x − 1| · |x − 2| · · · · · |x − i|
dla x ∈ R, i = 1, . . . , n.
8.16. Sprawdzić, czy
1
X
,
1
X−1
,
1
X−2
, . . . ,
1
X−n
są liniowo niezależne w przestrzeni Q(X) nad ciałem liczb
wymiernych.
8.17. Wykazać, że w przestrzeni ilorazowej V /U
n
X
i=0
a
i
(α
i
+ U ) = (
n
X
i=0
a
i
α
i
) + U
8.18. Niech v
1
, . . . , v
m
będą wektorami przestrzeni V , natomiast U niech będzie podprzestrzenią przes-
trzeni V .
Pokazać, że (v
1
+ U, . . . , v
m
+ U ) jest liniowo niezależnym układem wektorów przestrzeni V /U
wtedy i tylko wtedy, gdy lin(v
1
, . . . , v
m
)∩U = {θ} i (v
1
, . . . , v
m
) jest układem liniowo niezależnym.
§ 9. Podprzestrzenie generowane przez wektory.
9.1. Niech A, B będą podzbiorami przestrzeni liniowej V . Pokazać, że:
(a) A ⊂ B
=⇒
lin(A) ⊂ lin(B),
(b) A = B
=⇒
lin(A) = lin(B),
(c) A < V
⇐⇒
lin(A) = A,
(d) lin(lin(B)) = lin(B),
(e) lin(A ∪ B) = lin(A) + lin(B).
9.2. Pokazać, że
(a) β ∈ lin(α
1
, . . . , α
n
) ⇔ lin(α
1
, . . . , α
n
) = lin(β, α
1
, , α
n
),
(b) dla dowolnych i, j = 1, . . . , n, i 6= j oraz x ∈ K, zachodzi równość lin(α
1
, α
2
, . . . , α
n
) =
lin(α
1
, α
2
, . . . , α
i−1
, α
i
+ xα
j
, α
i+1
, . . . , α
n
),
(c) dla dowolnego i = 1, . . . , n, oraz x ∈ K, x 6= 0, zachodzi równość lin(α
1
, α
2
, . . . , α
n
) =
lin(α
1
, α
2
, . . . , α
i−1
, xα
i
, α
i+1
, . . . , α
n
).
9.3. Dla jakiego a ∈ K wektor α należy do podprzestrzeni przestrzeni K
n
generowanej przez wektory
α
1
, . . . , α
k
, jeżeli
(a) K = Q, α =
2
1
3
a
, α
1
=
a
2
0
1
, α
2
=
−1
1
−3
0
.

24
MAREK SZYJEWSKI
(b) K = C, α =
1
i
1
, α
1
=
a
−1 + i
1 + i
, α
2
=
i
−1
−a
.
(c) K = Z
7
, α =
1
2
4
5
, α
1
=
0
6
2
a
, α
2
=
a
1
1
1
, α
3
=
−a
2
0
2
.
9.4. W zależności od parametru a ∈ Z
5
wyznaczyć wymiar podprzestrzeni przestrzeni Z
5
5
generowanej
przez wektory
2
a
1
3
4
,
1
1
a
4
1
,
1
2
2
4
a
.
9.5. Pokazać, że R
4
= U
1
⊕ U
2
, jeżeli
(a) U
1
jest zbiorem rozwiązań równania x
1
+ x
2
+ x
3
+ x
4
= 0, a U
2
= lin(
1
1
1
1
).
(b) U
1
jest zbiorem rozwiązań układu równań
(
x
1
+ 2x
2
− x
3
+ 3x
4
= 0
−x
1
+ x
2
+ x
3
= 0
, natomiast U
2
=
lin(
0
2
−1
1
,
1
1
1
1
).
9.6. Pokazać, że R
4
= U
1
+ U
2
, lecz R
4
6= U
1
⊕ U
2
, jeżeli U
1
jest zbiorem rozwiązań równania 3x
1
− 2x
2
+
x
3
+ 4x
4
= 0, zaś U
2
= lin(
1
1
1
1
,
2
0
−1
3
). Do równania definiującego U
1
dołożyć jeszcze jedno
równanie tak, aby nowa podprzestrzeń rozwiązań U
0
1
spełniała warunek R
4
= U
0
1
⊕ U
2
.
9.7. Uzasadnić, że
R
3
=
lin(
1
0
0
,
0
1
0
) ⊕ lin(
1
1
1
) = lin(
1
0
0
,
0
0
1
) ⊕ lin(
1
1
1
)
=
lin(
0
1
0
,
0
0
1
) ⊕ lin(
1
1
1
).

ALGEBRA LINIOWA I GEOMETRIA 1
25
W przypadku każdej sumy prostej przedstawić wektor
5
2
−1
w postaci sumy wektora z pier-
wszego składnika sumy prostej i wektora z drugiego składnika sumy prostej.
9.8. W przestrzeni liniowej V wyznaczyć wszystkie kombinacje liniowe wektorów α
1
, . . . , α
n
, gdzie:
(a) V = Z
3
2
,
n = 3,
α
1
=
1
0
1
, α
2
=
1
1
1
, α
3
=
0
1
0
;
(b) V = Z
3
3
,
n = 2,
α
1
=
1
0
2
, α
2
=
1
1
1
;
(c) V = (Z
2
)
2
2
,
n = 2,
α
1
=
"
1
0
1
1
#
α
2
=
"
0
1
1
1
#
.
9.9. Wykorzystując zadanie
wybrać z podanego zbioru rozpinającego podprzestrzeń U przestrzeni
liniowej V minimalny zbiór rozpinający podprzestrzeń U , gdzie:
(a) V = R
3
,
U = lin(
1
5
7
,
2
1
2
,
−5
2
1
);
(b) V = (Z
5
)
4
,
U = lin([4, 2, 3, 2], [2, 1, 2, 2], [1, 3, 0, 4], [2, 1, 4, 1] );
(c) V = (Z
3
)
2
2
,
U = lin(
"
1
2
2
2
#
,
"
2
2
2
2
#
,
"
0
1
1
1
#
).
9.10. Wykonując przekształcenia elementarne na zbiorze rozpinającym, znaleźć minimalny zbiór rozpina-
jący podprzestrzeń U przestrzeni liniowej V , gdzie:
(a) V = R
4
,
U = lin( [1, 2, −2, 2], [0, 3, −3, 0], [−2, 5, −5, −4], [−1, 0, 0, −2], [3, −1, −1, 6] );
(b) V = Z
7
3
,
U = lin(
1
3
3
,
2
5
0
,
2
1
4
,
5
2
0
);
(c) V = Q
3
,
U = lin(
1
1
1
,
2
−1
3
,
0
1
−5
,
3
−2
1
,
6
−2
−1
).
9.11. (G. Birkhoff
) Sprawdzić, że z podprzestrzeni lin(
1
0
1
), lin(
0
1
1
), lin(
0
0
1
), lin(
1
1
1
) za
pomocą operacji + i ∩ można utworzyć nieskończenie wiele różnych podprzestrzeni przestrzeni
R
3
. (Wskazówka: wygodnie jest rysować na płaszczyźnie z = 1 przekroje badanych podprzestrzeni
z tą płaszczyzną; nie wszystkie podprzestrzenie mają z nią niepusty przekrój!)
9
Garret Birkhoff (1911 - 1996) - wspóczesny matematyk amerykański, nie mylić z George D. Birkhoffem (1884
- 1944), amerykańskim specjalistą od równań różniczkowych i jego ojcem.
26
MAREK SZYJEWSKI
§ 10. Bazy
10.1. Niech (β
1
, β
2
, . . . , β
n
) będzie układem niezerowych wektorów przestrzeni V .
Pokazać, że układ
(β
1
, β
2
, . . . , β
n
) jest bazą przestrzenią V wtedy i tylko wtedy, gdy V = lin(β
1
) ⊕ lin(β
2
) ⊕ · · · ⊕
lin(β
n
).
10.2. Pokazać, że wektory α
1
, . . . , α
n
tworz bazę przestrzeni Q
n
i znaleźć współrzędne wektora β w tej
bazie, jeżeli
(a) n = 3; α
1
=
1
1
1
, α
2
=
1
1
2
, α
3
=
1
2
3
, β =
6
9
14
.
(b) n = 3; α
1
=
2
1
−3
, α
2
=
3
2
−5
, α
3
=
1
−1
1
, β =
6
2
−7
.
(c) n = 4; α
1
=
1
2
−1
−2
, α
2
=
2
3
0
−1
, α
3
=
1
2
1
4
, α
4
=
1
3
−1
0
, β =
7
14
−1
2
.
10.3. Wyznaczyć bazy podprzestrzeni rozwiązań następujących układów równań (nad R):
(a)
x
1
+ 3x
2
+ 2x
3
= 0
2x
1
− x
2
+ 3x
3
= 0
3x
1
− 5x
2
+ 4x
3
= 0
(b)
x
1
+ x
2
− 3x
4
= 0
x
1
− x
2
+ 2x
3
− x
4
= 0
4x
1
− 2x
2
+ 6x
3
+ 3x
4
= 0
.
10.4. Wyznaczyć bazę i wymiar
podprzestrzeni lin(α
1
, α
2
, . . . , a
n
) przestrzeni Q
4
gdy:
(a) α
1
=
5
2
−3
1
, α
2
=
4
1
−2
3
, α
3
=
1
1
−1
2
, α
4
=
3
4
−1
2
;
(b) α
1
=
2
−1
3
5
, α
2
=
4
−3
1
3
, α
3
=
3
−2
3
4
, α
4
=
4
−1
15
17
, α
5
=
7
−6
−7
0
;
(c) α
1
=
1
2
3
−4
, α
2
=
2
3
−4
1
, α
3
=
2
−5
8
−3
, α
4
=
5
26
−9
−12
, α
5
=
3
−4
1
2
.
10.5. Wybrać bazę podprzestrzeni lin(α
1
, α
2
, . . . , a
n
) ⊂ Z
m
7
spośród wektorów α
1
, α
2
, . . . , a
n
, jeżeli
(a) α
1
=
1
2
0
0
, α
2
=
1
2
3
4
, α
3
=
3
6
0
0
;
10
Pojęcie wymiaru przestrzeni wektorowej pochodzi od Grassmanna.

ALGEBRA LINIOWA I GEOMETRIA 1
27
(b) α
1
=
1
2
3
4
, α
2
=
2
3
4
5
, α
3
=
3
4
5
6
, α
4
=
4
5
6
0
;
(c) α
1
=
2
1
4
1
, α
2
=
4
2
1
2
, α
3
=
6
3
5
3
, α
4
=
1
1
1
1
, α
5
=
6
0
4
0
;
(d) α
1
=
1
2
3
, α
2
=
2
3
4
, α
3
=
3
2
3
, α
4
=
4
3
4
, α
5
=
1
1
1
.
Wybrać dowolne bazy powyższych podprzestrzeni, niekoniecznie spośród wektorów
α
1
, α
2
, . . . , a
n
.
10.6. Czy można znaleźć bazę przestrzeni K
4
złożoną z wektorów postaci:
(a)
x
1
x
2
x
3
x
4
; x
1
+ x
2
+ x
3
+ x
4
= 0,
(b)
x
1
x
2
x
3
x
4
; x
1
+ x
2
+ x
3
+ x
4
= 1.
Pokazać, że jeśli U jest właściwą podprzestrzenią przestrzeni liniowej V , to istnieje baza przestrzeni
V , której wszystkie wektory należą do V \U .
10.7. Pokazać, że jeśli wektory α
1
, α
2
, . . . , a
n
tworzą bazę przestrzeni wektorowej V nad ciałem K, to dla
dowolnych i, j = 1, . . . , n, i 6= j, wektory:
(a) α
1
, α
2
, . . . , α
i−1
, α
i
+ xα
j
, a
i+1
, . . . , a
n
dla x ∈ K,
(b) α
1
, α
2
, . . . , α
i−1
, xα
i
, a
i+1
, . . . , a
n
dla x ∈ K, x 6= 0
również tworzą bazę przestrzeni V .
10.8. Znaleźć bazę przestrzeni R
3
, w której wektor ε
1
ma współrzędne (1, 2, 1) oraz bazę, w której wektor
ten ma współrzędne (1, 1, 1), a wektor ε
1
+ ε
2
wspórzędne (1, 0, 0).
10.9. Znaleźć bazę każdej z niżej wypisanych podprzestrzeni przestrzeni R
4
oraz bazę sumy algebraicznej
U
i
+ U
j
, jak i części wspólnej U
i
∩ U
j
każdej pary podprzestrzeni:
(a) U
1
= lin(
1
1
2
0
,
−1
0
1
1
,
3
2
3
−1
), U
2
= {
x
1
x
2
x
3
x
4
∈ R
4
: x
1
+ x
2
− 2x
3
+ x
4
= 0}.
(b) U
1
= lin(
2
1
−1
1
,
3
0
1
−1
,
4
−1
1
−3
), U
2
= lin(
1
−1
2
−2
,
4
0
0
−3
),
28
MAREK SZYJEWSKI
U
3
= {
x
1
x
2
x
3
x
4
∈ R
4
: x
1
− x
2
+ x
3
+ x
4
= 0}.
(c) U
1
= {
x
1
x
2
x
3
x
4
∈ R
4
: 2x
1
− x
2
+ x
3
− 2x
4
= 0},
U
2
= lin(
2
1
−1
1
,
−1
0
2
1
,
4
3
1
5
).
(d) U
1
= lin(
1
2
3
1
,
2
1
2
3
,
3
3
5
4
,
3
0
1
5
), U
2
= lin(
1
2
1
1
,
1
0
0
0
,
0
1
0
0
).
10.10. Niech ciało K ma q elementów. Obliczyć, ile przestrzeń K
n
ma różnych
(a) wektorów,
(b) baz.
10.11. Niech U będzie podprzestrzenią przestrzeni liniowej V .
Układ (u
1
, u
2
, . . . , u
k
) jest bazą pod-
przestrzeni U , a układ (v
1
, v
2
, . . . , v
m
) jest taki, że (u
1
, u
2
, . . . , u
k
, v
1
, v
2
, . . . , v
m
) jest bazą przes-
trzeni V . Wykazać, że układ warstw (v
1
+ U, v
2
+ U, . . . , v
m
+ U ) jest bazą przestrzeni V /U .
§ 11. Wyznaczniki
11.1. Obliczyć wyznaczniki
następujących macierzy:
(a)
1
2
3
5
1
4
3
2
5
,
(b)
−1
5
4
3
−2
0
−1
3
6
,
(c)
0
2
2
2
0
2
2
2
0
,
(d)
1
2
3
4
5
6
7
8
9
,
(e)
a
b
c
b
c
a
c
a
b
,
(f )
sin α
cos α
1
sin β
cos β
1
sin γ
cos γ
1
gdzie α, β, γ są
miarami kątów trójkąta,
(g)
1
ε
ε
2
ε
2
1
ε
ε
ε
2
1
, gdzie ε = −
1
2
+ i
√
3
2
,
(h)
1
1
1
1
ε
ε
2
1
ε
2
ε
3
,
gdzie ε =
cos
4π
3
+ i sin
4π
3
,
(i)
cos α cos β
−r sin α cos β
−r cos α sin β
sin α cos β
r cos α cos β
−r sin α sin β
sin β
0
r cos β
.
11
Wyznaczniki odkrył po raz pierwszy G. W. Leibniz w 1693 r. W 1750 odkrył je powtórnie Szwajcar Gabriel
Cramer (nie mylić ze wspóczesnym matematykiem szwedzkim Carlem Haraldem Cramerem). Nazwę "wyznacznik"
("determinant") wprowadził w 1815 r. A. Cauchy. Dwie pionowe kreski jako symbol wyznacznika wprowadził w
1841 r. A. Cayley.
ALGEBRA LINIOWA I GEOMETRIA 1
29
11.2. Obliczyć następujące wyznaczniki (nad R):
(a)
1
2
3
4
−3
2
−5
13
1
−2
10
4
−2
9
−8
25
,
(b)
1
−1
1
−2
1
3
−1
3
−1
−1
4
3
−3
0
−8
−13
,
(c)
7
6
9
4
−4
1
0
−2
6
6
1
−1
−2
4
5
1
−1
−2
4
4
−7
0
−9
2
−2
,
(d)
1
1
0
0
0
0
1
1
0
0
0
0
1
1
0
0
0
0
1
1
1
0
0
0
1
,
(e)
1
1
0
0
0
0
0
1
1
0
0
0
0
0
1
1
0
0
0
0
0
1
1
0
0
0
0
0
1
1
1
0
0
0
0
1
,
(f )
4
4
−1
0
−1
8
2
3
7
5
2
3
3
2
5
7
3
2
1
2
2
1
1
2
1
7
6
6
5
7
2
1
1
2
2
1
,
(g)
1001
1002
1003
1004
1002
1003
1001
1002
1001
1001
1001
999
1001
1000
998
999
,
(h)
30
20
15
12
20
15
12
15
15
12
15
20
12
15
20
30
,
(i)
5
−4
4
0
0
0
9
−7
6
0
0
0
3
−2
1
0
0
0
1
−1
2
0
0
1
0
1
−3
0
1
0
−2
1
0
1
0
0
,
(j)
1
6
20
50
140
140
0
−16
−70
−195
−560
−560
0
26
125
366
1064
1064
0
−31
−154
−460
−1344
−1344
0
4
20
60
176
175
0
4
20
60
175
176
,
(k)
3
1
1
1
1
1
−1
3
1
1
1
1
−1
−1
3
1
1
1
−1
−1
−1
3
1
1
−1
−1
−1
−1
3
1
−1
−1
−1
−1
−1
3
.

30
MAREK SZYJEWSKI
11.3. Obliczyć:
(a)
1
2
3
4
3
2
5
3
1
2
3
5
2
2
1
4
nad Z
7
,
(b)
1
1
1
2
1
3
1
3
1
1
4
3
3
0
8
10
nad Z
11
,
(c)
7
6
11
4
4
1
0
2
6
6
7
8
9
1
6
1
10
2
4
5
7
0
9
2
2
nad Z
13
.
11.4. Obliczyć wyznaczniki następujących macierzy stopnia n :
(a)
1
1
0
0
· · ·
0
0
0
1
1
0
· · ·
0
0
..
.
..
.
..
.
..
.
. .
.
..
.
..
.
0
0
0
0
· · ·
1
1
1
0
0
0
· · ·
0
1
,
(b)
2
1
0
· · ·
0
0
1
2
1
· · ·
0
0
0
1
2
· · ·
0
0
..
.
..
.
..
.
. .
.
..
.
..
.
0
0
0
· · ·
2
1
0
0
0
· · ·
1
2
,
(c)
3
2
0
· · ·
0
0
1
3
2
· · ·
0
0
0
1
3
· · ·
0
0
..
.
..
.
..
.
. .
.
..
.
..
.
0
0
0
· · ·
3
2
0
0
0
· · ·
1
3
,
(d)
a
1
1
1
· · ·
1
1
a
1
1
· · ·
1
1
1
a
1
· · ·
1
1
1
1
a
· · ·
1
..
.
..
.
..
.
..
.
. .
.
..
.
1
1
1
1
· · ·
a
,
(e)
a
1
1
· · ·
1
1
−1
a
1
· · ·
1
1
−1
−1
a
· · ·
1
1
..
.
..
.
..
.
. .
.
..
.
..
.
−1
−1
−1
· · ·
a
1
−1
−1
−1
· · ·
−1
a
,
(f )
1
n
n
· · ·
n
n
n
2
n
· · ·
n
n
n
n
3
· · ·
n
n
..
.
..
.
..
.
. .
.
..
.
..
.
n
n
n
· · ·
n − 1
n
n
n
n
· · ·
n
n
,
(g)
a
b
0
· · ·
0
0
0
a
b
· · ·
0
0
0
0
a
· · ·
0
0
..
.
..
.
..
.
. .
.
..
.
..
.
0
0
0
0
a
b
b
0
0
0
0
a
.
11.5. Niech A = [a
ij
], a
ij
∈ Z, będzie macierzą kwadratową stopnia n. Pokazać, że det A jest liczbą
cakowitą. Załóżmy dodatkowo, że a
ij
= ±k, gdzie k jest ustaloną liczbą cakowitą. Pokazać, że
2
n−1
k
n
dzieli det A.
11.6. Pokazać, że jeśli A jest macierzą antysymetryczną (tzn. A
|
= −A) stopnia nieparzystego nad R, to
jest ona osobliwa, czyli det A = 0.
ALGEBRA LINIOWA I GEOMETRIA 1
31
11.7. Liczby 20604, 53227, 25755, 20927 i 289 dzielą się przez 17. Pokazać (bez obliczania), że wyznacznik
2
0
6
0
4
5
3
2
2
7
2
5
7
5
5
2
0
9
2
7
0
0
2
8
9
również dzieli się przez 17.
11.8. Niech A = [a
ij
] będzie macierzą kwadratową stopnia n. Jak zmieni się wyznacznik macierzy A,
jeżeli:
(a) każdy element a
ij
pomnożymy przez c
i−j
(c ustalone),
(b) obrócimy macierz A o 90
◦
wokół jej ”środka” (zgodnie z ruchem wskazówek zegara),
(c) zapiszemy wiersze (kolumny) macierzy A w odwrotnej kolejności,
(d) do każdej kolumny (wiersza) poczynając od drugiej (drugiego) dodamy poprzednią kolumnę
(poprzedni wiersz),
(e) do każdej kolumny (wiersza) poczynając od drugiej (drugiego) dodamy poprzednią kolumnę
(poprzedni wiersz), a pierwszej kolumny (do pierwszego wiersza) dodamy starą ostatnią kolumnę
(stary ostatni wiersz),
(f ) do każdej kolumny (wiersza) poczynając od drugiej (drugiego) dodamy wszystkie porzednie
kolumny (poprzednie wiersze).
11.9. Znaleźć największą wartość wyznacznika macierzy kwadratowej stopnia 3, której elementy są liczbami
całkowitymi równymi
(a) 0 lub 1,
(b) −1 lub 1.
11.10. Przeanalizować Przykład 6.7 ze stron 158-159 z książki A. Białynickiego-Biruli, BB (dowód wzoru
na wyznacznik macierzy klatkowo-trójkątnej det
"
A
0
D
B
#
= det A det B przez indukcję wzglę-
dem stopnia klatki B).
11.11. Sprawdzić tożsamości:
(1)
a
b
c
e
f
g
i
j
k
=
1
a
a
b
e
f
a
c
e
g
a
b
i
j
a
c
i
k
(2)
a
b
c
d
e
f
g
h
i
j
k
l
m
n
o
p
=
1
a
2
a
b
e
f
a
c
e
g
a
d
e
h
a
b
i
j
a
c
i
k
a
d
i
l
a
b
m
n
a
c
m
o
a
d
m
p
(3) Sformułować i udowodnić ogólne twierdzenie.

32
MAREK SZYJEWSKI
11.12. * Sprawdzić, że nastepująca równość jest tożsamością:
a
b
c
d
e
f
g
h
i
j
k
l
m
n
o
p
=
1
a
2
a
b
e
f
a
c
e
g
a
d
e
h
a
b
i
f
a
c
i
k
a
d
i
l
a
b
m
n
a
c
m
o
a
d
m
p
+ (f − j)
a
c
d
e
g
h
m
o
p
11.13. Zbadać rozwiązalność układu równań
x + y + z = 9
3x − y + 2z = 10
2x + 7y − 3z = 8
ax − by + cz = 20
ax + by + cz = 44
10ax + 3by − cz = 26
w zależności od parametrów a, b, c.
11.14. Jeśli α, β, γ, . . . są wektorami przestrzeni współrzędnych K
n
, to symbolem [α, β, γ, . . .] oznaczamy
macierz, której kolumny są utworzone ze wspórzędnych wektorów α, β, γ, . . .. Dla k ≤ n :
(a) Sprawdzić, że wektory α
1
, α
2
, . . . , α
k
są liniowo niezależne wtedy i tylko wtedy, gdy istnieje
taki podzbiór {i
1
, i
2
, . . . , i
n−k
} zbioru {1, 2, . . . , n}, że
det[α
1
, α
2
, . . . , α
k
, ε
i
1
, ε
i
2
, . . . , ε
i
n−k
] 6= 0.
(b) Sprawdzić, że wektory α
1
, α
2
, . . . , α
k
są liniowo zależne wtedy i tylko wtedy, gdy dla
każdego {i
1
, i
2
, . . . , i
n−k
} zbioru {1, 2, . . . , n} zachodzi równość
det[α
1
, α
2
, . . . , α
k
, ε
i
1
, ε
i
2
, . . . , ε
i
n−k
] = 0.
(c) Zapisać oba warunki za pomocą wzorów, w których występują tylko współrzędne wektorów
α
1
, α
2
, . . . , α
k
.
11.15. Przypuśćmy, że α, α
1
, α
2
, . . . , α
k
∈ K
n
oraz że wektory α
1
, α
2
, . . . , α
k
są liniowo niezależne. Oz-
naczmy ξ := [x
1
, x
2
, . . . , x
n
]
|
. Niech ε
i
1
, ε
i
2
, . . . , ε
i
n−k
będą takie, że
det[α
1
, α
2
, . . . , α
k
, ε
i
1
, ε
i
2
, . . . , ε
i
n−k
] 6= 0.
Pokazać, że warstwa α + lin(α
1
, . . . , α
k
) przestrzeni K
n
jest zbiorem rozwiązań układu równań
det[α
1
, α
2
, . . . , α
k
, ξ − α, ε
i
2
, . . . , ε
i
n−k
] = 0
det[α
1
, α
2
, . . . , α
k
, ε
i
1
, ξ − α, . . . , ε
i
n−k
] = 0
..
.
det[α
1
, α
2
, . . . , α
k
, ε
i
1
, ε
i
2
, . . . , ξ − α] = 0
.

ALGEBRA LINIOWA I GEOMETRIA 1
33
11.16. Znaleźć układ równań liniowych nad R, którego zbiorem rozwiązań jest:
(a)
1
2
3
4
+ lin(
1
−1
−3
−1
),
(b)
1
0
3
+ lin(
1
2
3
,
−2
4
1
),
(c)
0
1
2
+ lin(
1
1
1
),
(d)
1
0
1
2
+ lin(
2
1
3
1
,
−1
1
3
1
,
1
2
0
1
).
11.17. Rozwiązać jeszcze raz zadania
str.
str.
Bazy oraz zadanie
str.
korzystając nowo poznanych metod.
11.18. Rozwiązać za pomocą wzorów Cramera następujące układy równań:
(a)
2x − y − z = 4
3x + 4y − 2z = 11
3x − 2y + 4z = 11
,
(b)
x + y + 2z = −1
2x − y + 2z = −4
4x + y + 4z = −2
,
(c)
x + y + 4z = 31
5x + y + 2z = 29
3x − y + z = 10
,
(d)
x + y + 2z + 3t = 1
3x − y − z − 2t = −4
2x + 3y − z − t = −6
x + 2y + 3z − t = −4
,
(e)
y − 3z + 4t = −5
x
− 2z + 3t = −4
3x + 2y
− 5z = 12
4x + 3y − 5z
= 5
.
11.19. Rozwiązać układy równań z zestawu
str.
Układy równań przy użyciu wyznaczników.
11.20. W zależności od parametrów a, b ∈ R rozwiązać układy równań:
(a)
ax + y + z = 1
x + ay + z = a
x + y + az = a
2
,
(b)
ax + y + z = 4
x + by + z = 3
x + 2by + z = 4
,
(c)
ax + by + z = 1
x + aby + z = b
x + by + az = 1
.
11.21. Dla jakich parametrów a, b, c, d ∈ R każdy układ równań z danymi lewymi stronami ma rozwiązanie?
(a)
ax + by + cz + dt
bx − ay + dz − ct
cx − dy − az + bt
dx + cy − bz − at
,
(b)
a
2
x
+ ay
+ az
+ at
ax + (b
2
− 1)y + (2b + 1)z + (3b + 1)t
ax + (2b + 1)y + (c
2
+ 5)z + (3c + 7)t
ax + (3b + 1)y + (3c + 7) + (d
2
+ 1)t
.
Jak zmieni się odpowiedź, jeżeli dopuścić a, b, c, d ∈ C? Podać wzory na rozwiązanie układu (a)
oraz (b) (przy dowolnych prawych stronach równań).
11.22. Obliczyć wyznacznik nad ciałem Q liczb wymiernych:
(a)
49
119
133
323
35
84
95
228
20
48
55
132
28
68
77
187
,
(b)
171
722
63
266
76
323
28
119
99
418
36
152
44
187
16
68
,
(c)
153
646
63
266
68
289
28
119
108
456
45
190
48
204
20
85
,
(d)
323
119
133
49
187
68
77
28
228
84
95
35
132
48
55
20
.
34
MAREK SZYJEWSKI
11.23. Wyznaczyć liczby rzeczywiste a spełniające równość:
(a)
1
1
−1
1
3 − a
1 − a
−1
1 − a
4 − 2a
= 0;
(b)
1
2
0
2
6 − a
6 − 3a
0
6 − 3a
19 − 10a
= 0;
(c)
1
1
−1
1
3 − a
3 − 2a
−1
3 − 2a
5 − 2a
= 0;
(d)
1
3
0
3
11 − a
4 − 2a
0
4 − 2a
1 − a
= 0.
11.24. Wyznacznikiem Vandermonde’a
(stopnia n nad ciałem K) nazywamy wyznacznik postaci
V
n
(x
1
, . . . , x
n
) =
1
x
1
x
2
1
· · ·
x
n−1
1
1
x
2
x
2
2
· · ·
x
n−1
2
..
.
..
.
..
.
. .
.
..
.
1
x
n
x
2
n
· · ·
x
n−1
n
.
(a) Obliczyć wartość wyznacznika Vandermonde’a.
(Rozwiązanie: Wyprowadzimy najpierw wzór rekurencyjny. Postępujemy następująco: od n-tej
kolumny odejmujemy (n − 1)-szą pomnożoną przez x
n
, od (n − 1)-szej kolumny odejmujemy
(n − 2)-gą pomnożoną przez x
n
, od drugiej kolumny odejmujemy pierwszą pomnożoną przez x
n
.
Jako wynik otrzymujemy równość
V
n
(x
1
, . . . , x
n
) =
1
x
1
− x
n
x
1
(x
1
− x
n
)
· · ·
x
n−2
1
(x
1
− x
n
)
1
x
2
− x
n
x
2
(x
2
− x
n
)
· · ·
x
n−2
2
(x
2
− x
n
)
..
.
..
.
..
.
. .
.
..
.
1
x
n−1
− x
n
x
n−1
(x
n−1
− x
n
)
· · ·
x
n−2
n−1
(x
n−1
− x
n
)
1
0
0
0
0
.
Po rozwinięciu względem ostatniego wiersza oraz wyłączeniu z każdego wiersza odpowiedniego
czynnika przed wyznacznik otrzymujemy w wyniku
V
n
(x
1
, . . . , x
n
)
=
(−1)
n+1
(x
1
− x
n
) · · · · · (x
n−1
− x
n
)V
n−1
(x
1
, . . . , x
n−1
)
=
(x
n
− x
1
) · · · · · (x
n
− x
n−1
)V
n−1
(x
1
, . . . , x
n−1
).
Prosty dowód indukcyjny daje w rezultacie wzór V
n
(x
1
, . . . , x
n
) =
Q
k>l
(x
k
− x
l
).
(b) Wykazać, że V
n
(x
1
, . . . , x
n
) 6= 0 wtedy i tylko wtedy, gdy wszystkie x
1
, . . . , x
n
są parami
różne.
(c) Niech x
1
, . . . , x
n
, y
1
, . . . , y
n
∈ K oraz niech x
1
, . . . , x
n
będą parami różne. Pokazać, że
istnieje dokładnie jeden wielomian w(X) ∈ K[X] o wspóczynnikach z ciała K stopnia < n taki,
że w(x
i
) = y
i
dla i = 1, . . . , n. Wskazówka. Wykorzystać twierdzenie Cramera.
(d) Znaleźć wielomian w(X) ∈ R[X] stopnia < 3 taki, że w(1) = 2, w(−1) = 3, w(2) = 1.
11.25. Obliczyć wyznaczniki:
12
Vandermonde, Alexandre Thèophill (28 II 1735 Paryż - 1 I 1796 Paryż) - matematyk francuski. Zajmował się
teorią funkcji symetrycznych; uporządkował teorię wyznaczników.

ALGEBRA LINIOWA I GEOMETRIA 1
35
(a)
a
0
· · ·
0
0
· · ·
0
b
0
a
· · ·
0
0
· · ·
b
0
..
.
..
.
. .
.
..
.
..
.
.·
·
..
.
..
.
0
0
· · ·
a
b
· · ·
0
0
0
0
· · ·
b
a
· · ·
0
0
..
.
..
.
.·
·
..
.
..
.
. .
.
..
.
..
.
0
b
· · ·
0
0
· · ·
a
0
b
0
· · ·
0
0
· · ·
0
a
;
(b)
A
B
B
A
, gdzie A =
b
0
b
1
b
1
b
1
b
2
b
2
b
2
b
2
b
2
b
2
b
1
b
0
b
2
b
2
b
1
b
2
b
3
b
1
b
3
b
2
b
1
b
2
b
0
b
2
b
3
b
1
b
2
b
2
b
1
b
3
b
1
b
2
b
2
b
0
b
2
b
3
b
1
b
3
b
2
b
1
b
2
b
1
b
3
b
2
b
0
b
3
b
3
b
2
b
4
b
1
b
2
b
2
b
1
b
3
b
3
b
0
b
3
b
1
b
2
b
4
b
2
b
3
b
2
b
1
b
3
b
3
b
0
b
4
b
1
b
2
b
2
b
1
b
2
b
3
b
2
b
1
b
4
b
0
b
3
b
3
b
2
b
3
b
1
b
2
b
4
b
2
b
1
b
3
b
0
b
3
b
2
b
2
b
3
b
1
b
1
b
4
b
2
b
3
b
3
b
0
,
B =
b
5
b
4
b
4
b
4
b
3
b
3
b
3
b
3
b
3
b
3
b
4
b
5
b
3
b
3
b
4
b
3
b
2
b
4
b
2
b
3
b
4
b
3
b
5
b
3
b
2
b
4
b
3
b
3
b
4
b
2
b
4
b
3
b
3
b
5
b
3
b
2
b
4
b
2
b
3
b
4
b
3
b
4
b
2
b
3
b
5
b
2
b
2
b
3
b
1
b
4
b
3
b
3
b
4
b
2
b
2
b
5
b
2
b
4
b
3
b
1
b
3
b
2
b
3
b
4
b
2
b
2
b
5
b
1
b
4
b
3
b
3
b
4
b
3
b
2
b
3
b
4
b
1
b
5
b
2
b
2
b
3
b
2
b
4
b
3
b
1
b
3
b
4
b
2
b
5
b
2
b
3
b
3
b
2
b
4
b
4
b
1
b
3
b
2
b
2
b
5
;
(c)
a
b
b
· · ·
b
b
c
a
b
· · ·
b
b
c
c
a
· · ·
b
b
..
.
..
.
..
.
. .
.
..
.
..
.
c
c
c
· · ·
a
b
c
c
c
· · ·
c
a
.

36
MAREK SZYJEWSKI
(d)
x
1
− y
1
x
2
− y
1
x
3
− y
1
· · ·
x
n−1
− y
1
x
n
− y
1
1
x
1
− y
2
x
2
− y
2
x
3
− y
2
· · ·
x
n−1
− y
2
x
n
− y
2
1
x
1
− y
3
x
2
− y
3
x
3
− y
3
· · ·
x
n−1
− y
3
x
n
− y
3
1
..
.
..
.
..
.
. .
.
..
.
..
.
..
.
x
1
− y
n−1
x
2
− y
n−1
x
3
− y
n−1
· · ·
x
n−1
− y
n−n
x
n
− y
n−1
1
x
1
− y
n
x
2
− y
n
x
3
− y
n
· · ·
x
n−1
− y
n
x
n
− y
n
1
0
0
0
· · ·
0
0
1
i
x
1
− y
1
x
2
− y
1
x
3
− y
1
· · ·
x
n−1
− y
1
x
n
− y
1
x
1
− y
2
x
2
− y
2
x
3
− y
2
· · ·
x
n−1
− y
2
x
n
− y
2
x
n
− y
3
x
2
− y
3
x
3
− y
3
· · ·
x
n−1
− y
3
x
n
− y
3
..
.
..
.
..
.
. .
.
..
.
..
.
x
n
− y
n−1
x
2
− y
n−1
x
3
− y
n−1
· · ·
x
n−1
− y
n−1
x
n
− y
n−1
x
n
− y
n
x
2
− y
n
x
3
− y
n
· · ·
x
n−1
− y
n
x
n
− y
n
.
§ 12. Rzędy macierzy
12.1. Obliczyć rzędy
następujących macierzy (nad ciałem R liczb rzeczywistych):
(a)
1
1
1
1
4
3
2
1
1
4
1
1
5
1
1
1
1
1
3
1
1
1
1
2
,
(b)
3
1
1
2
−1
0
2
−1
1
2
4
3
2
−1
1
12
9
8
−7
3
−12
−5
−8
5
1
,
(c)
8
1
−2
2
7
4
2
4
2
−1
−2
−1
1
5
3
,
(d)
1
7
7
9
7
5
1
−1
4
2
−1
−3
−1
1
3
5
,
(e)
4
0
3
2
1
−7
4
5
7
1
5
3
−5
−3
−3
−1
1
−5
2
3
,
(f )
8
−4
5
5
9
1
−3
−5
0
−7
7
−5
1
4
1
3
−1
3
2
5
,
(g)
1
1
0
0
0
0
1
1
0
0
0
0
1
1
0
0
0
0
1
1
1
0
0
0
1
,
(h)
1
1
0
0
0
0
0
1
1
0
0
0
0
0
1
1
0
0
0
0
0
1
1
0
0
0
0
0
1
1
1
0
0
0
0
1
,
(i)
4
4
−1
0
−1
8
2
3
7
5
2
3
3
2
5
7
3
2
1
2
2
1
1
2
1
7
6
6
5
7
2
1
1
2
2
1
,
(j)
5
−4
4
0
0
0
9
−7
6
0
0
0
3
−2
1
0
0
0
1
−1
2
0
0
1
0
1
−3
0
1
0
−2
1
0
1
0
0
.
13
Pojęcie rzędu macierzy wprowadził Sylvester; nazwa jest późniejsza.

ALGEBRA LINIOWA I GEOMETRIA 1
37
12.2. Obliczyć rzędy następujących macierzy stopnia n nad ciałem R liczb rzeczywistych:
(a)
1
1
0
0
· · ·
0
0
0
1
1
0
· · ·
0
0
..
.
..
.
..
.
..
.
. .
.
..
.
..
.
0
0
0
0
· · ·
1
1
1
0
0
0
· · ·
0
1
,
(b)
2
1
0
· · ·
0
0
1
2
1
· · ·
0
0
0
1
2
· · ·
0
0
..
.
..
.
..
.
. .
.
..
.
..
.
0
0
0
· · ·
2
1
0
0
0
· · ·
1
2
,
(c)
3
2
0
· · ·
0
0
1
3
2
· · ·
0
0
0
1
3
· · ·
0
0
..
.
..
.
..
.
. .
.
..
.
..
.
0
0
0
· · ·
3
2
0
0
0
· · ·
1
3
,
(d)
a
1
1
1
· · ·
1
1
a
1
1
· · ·
1
1
1
a
1
· · ·
1
1
1
1
a
· · ·
1
..
.
..
.
..
.
..
.
. .
.
..
.
1
1
1
1
· · ·
a
,
(e)
a
1
1
· · ·
1
1
−1
a
1
· · ·
1
1
−1
−1
a
· · ·
1
1
..
.
..
.
..
.
. .
.
..
.
..
.
−1
−1
−1
· · ·
a
1
−1
−1
−1
· · ·
−1
a
,
(f )
1
n
n
· · ·
n
n
n
2
n
· · ·
n
n
n
n
3
· · ·
n
n
..
.
..
.
..
.
. .
.
..
.
..
.
n
n
n
· · ·
n − 1
n
n
n
n
· · ·
n
n
,
(g)
a
b
0
· · ·
0
0
0
a
b
· · ·
0
0
0
0
a
· · ·
0
0
..
.
..
.
..
.
. .
.
..
.
..
.
0
0
0
0
a
b
b
0
0
0
0
a
.
12.3. W zależności od parametru λ ∈ R wyznaczyć rząd macierzy:
(a)
7 − λ
−12
6
10
−19 − λ
10
12
−24
13 − λ
,
(b)
−λ
1
2
3
1
1
−λ
3
2
1
2
3
−λ
1
1
3
2
1
−λ
1
,
(c)
1 − λ
0
0
0
0
1 − λ
0
0
0
0
2 − λ
3
0
0
0
3 − λ
,
(d)
3
4
2
2
3
17
7
1
1
10
4
λ
4
1
1
3
,
(e)
1
2
1
λ
−1
10
−1
λ
−6
2
5
1
.

38
MAREK SZYJEWSKI
12.4. Obliczyć rzędy następujących macierzy:
(a)
1
2
3
1
4
1
5
4
2
1
3
4
5
4
2
2
nad Z
7
,
(b)
2
3
1
6
4
3
2
2
1
2
2
2
9
8
5
1
1
12
2
11
nad Z
13
,
(c)
1
3
2
2
4
1
4
1
4
3
0
0
1
1
4
nad Z
5
.
12.5. Obliczyć rzędy następujących macierzy zespolonych:
(a)
1 + i
1 + i
1 − i
1 − i
−1 + i
1 + 3i
1
i
1 + i
,
(b)
1 − i
i
−1
1
0
2i
i
2 − i
1 + i
,
(c)
1 + 2i
1 − i
2 + 3i
2
3 + i
−2i
5 + i
2 − 2i
5i
3 − i
1 + 8i
4 + 2i
,
(d)
1 + i
2 − i
1 + 2i
1 − 5i
−7 − 4i
4 − 7i
1 − i
−1 − 2i
2 − i
2 + 4i
7 − i
1 + 7i
.
12.6. Wykazać, że r(A + B) ≤ r(A) + r(B).
12.7. Wykazać, że jeśli A oraz B są macierzami o tej samej liczbie wierszy, to r([A|B]) ≤ r(A) + r(B).
12.8. Wykazać, że jeśli A oraz B są macierzami rzeczywistymi o tej samej liczbie wierszy, to
r(
"
A
B
2A
−5B
#
) = r(A) + r(B). To samo nad Z
2
, Z
5
i nad Z
7
.
12.9. W zadaniach
str.
obliczyć rzędy macierzy wspóczynników oraz rzędy macierzy
uzupełnionych występujących tam układów równań. Dla każdego układu równań znaleźć układ
fundamentalny (tzn. bazę przestrzeni kierunkowej zbioru rozwiązań).
12.10. Wyznaczyć wszystkie liczby rzeczywiste x, y, z, t dla których:
(a)
x + 4y + 10z + 20t = x
−6y − 20z − 45t = y
4y + 15z + 36t = z
−y − 4z − 10t = t
,
(b)
x + 4y + 10z + 20t = −x
−6y − 20z − 45t = −y
4y + 15z + 36t = −z
−y − 4z − 10t = −t
,
(c) t = 0,
(d) x = y.
Znaleźć bazę podprzestrzeni rozwiązań każdego z powyższych układów równań.
12.11. W zależności od parametrów a, b ∈ R rozwiązać układy równań:
(a)
x + y + 2z = 1
x − y + z = 0
2x + ay + 2z = b
,
(b)
ax + y + z + t = 1
x + ay + z + t = 1
x + y + z + t = b
.
12.12. W zależności od parametru a ∈ Z
7
wyznaczyć wymiary podprzestrzeni rozwiązań układów równań:
(a)
2x + 2y + az + t = 0
x + y + 6z + at = 0
x + y
+ 2t = 0
,
(b)
(
x + ay + 4z + 3t = 0
ay + 3z + t = 0
.
ALGEBRA LINIOWA I GEOMETRIA 1
39
12.13. Dla jakich parametrów a, b ∈ Z
7
, układy równań liniowych U
1
oraz U
2
(nad ciałem Z
7
) mają równe
zbiory rozwiązań, jeżeli
U
1
:
(
x + 2y + 6z + 4t = 1
3x + y + 2z + t = 0
U
2
:
(
5x + ay
+ 2t = 2
3x + 5y + bz
= 1
§ 13. Macierze
13.1. Obliczyć iloczyny macierzy:
(a)
"
1
2
−2
3
#
·
"
−4
0
−1
5
#
, (b)
6
4
−2
1
7
9
·
"
0
1
2
3
4
5
#
, (c)
−3
4
1
0
2
8
1
3
−1
2
,
(d)
"
2
1
1
3
#
3
, (e)
h
1
2
3
4
5
i
|
·
h
1
2
3
4
5
i
,
(f )
h
1
2
3
4
5
i
·
h
1
2
3
4
5
i
|
, (g)
2
0
3
1
3
2
|
·
2
0
3
1
3
2
.
13.2. Dla A =
"
1
1
0
1
#
i B =
"
0
1
1
0
#
obliczyć:
(a) A
2
+ 2AB + B
2
i (A + B)
2
;
(b) A
2
− 2AB + B
2
i (A − B)
2
;
(c) A
2
− B
2
, (A − B)(A + B) i (A + B)(A − B).
13.3. Pokazać, że dla dowolnej liczby naturalnej m zachodzą równości:
(a)
"
a
0
0
b
#
m
=
"
a
m
0
0
b
m
#
, (b)
"
1
a
0
1
#
m
=
"
1
ma
0
1
#
,
(c)
"
cos α
− sin α
sin α
cos α
#
m
=
"
cos mα
− sin mα
sin mα
cos mα
#
, (d)
"
a
1
0
a
#
m
=
"
a
m
ma
m−1
0
a
m
#
,
(e)
1
1
0
0
1
1
0
0
1
m
=
1
m
m(m−1)
2
0
1
m
0
0
1
.
13.4. Jeśli A ∈ K
n
n
, B ∈ K
m
m
, C ∈ K
m
n
, D ∈ K
n
m
, to macierz
"
A
D
C
B
#
nazywamy macierzą klatkową o
klatkach A, D, C, B. Sprawdzić, że
"
A
1
D
1
C
1
B
1
#
·
"
A
2
D
2
C
2
B
2
#
=
"
A
1
A
2
+ D
1
C
2
A
1
D
2
+ D
1
B
2
C
1
A
2
+ B
1
C
2
C
1
D
2
+ B
1
B
2
#
.
13.5. Dla A ∈ K
n
m
, B ∈ K
m
n
udowodnić równość tr(AB) = tr(BA).
13.6. Dla A ∈ K
n
m
, B ∈ K
m
s
udowodnić równość (AB)
|
= B
|
A
|
. Podać przykład pary macierzy C, D dla
których równość (CD)
|
= C
|
D
|
nie zachodzi.

40
MAREK SZYJEWSKI
13.7. Znaleźć wszystkie takie macierze A ∈ K
2
2
, że
(a) A
"
1
2
1
0
#
=
"
1
2
1
0
#
A, (b) A
"
1
0
0
0
#
=
"
1
1
0
0
#
, (c)
"
1
0
0
0
#
A =
"
1
1
0
0
#
,
(d) A
2
=
"
0
0
0
0
#
, (e) A
2
=
"
1
0
0
1
#
.
13.8. Centralizatorem macierzy A ∈ K
n
n
nazywamy zbiór Z(A) = {X ∈ K
n
n
: AX = XA}.
(a) Sprawdzić, że Z(A) jest podalgebrą algebry K
n
n
(tzn. jest podprzestrzenią przestrzeni K
n
n
,
zawiera macierz jednostkową I oraz jest zamknięty ze względu na mnożenie).
(b) Wyznaczyć Z(
0
1
0
0
0
0
1
0
0
0
0
1
0
0
0
0
).
(c) Wyznaczyć Z(A) w zależności od danej dowolnej macierzy A ∈ K
2
2
.
(d) Dla jakich A ∈ K
2
2
zachodzi równość Z(A) = lin(I, A)?
(e) Udowodnić, że każda macierz A ∈ K
2
2
spełnia warunek A
2
∈ lin(I, A).
13.9. Niech E
ir
oznacza macierz kwadratową stopnia n, której element o wskanikach i, r równy jest 1, a
pozostałe elementy są równe 0. Obliczyć:
(a) E
ir
· E
lk
, (b) A · E
ir
, (c) E
ir
· A, (d) A · (I
n
+ aE
ir
), i 6= r, (e) (I
n
+ bE
ir
) · A, i 6= r,
(f ) (I
n
+ aE
ir
)(I
n
+ bE
ir
), i 6= r,
gdzie A ∈ K
n
n
, a, b ∈ K. Zinterpretować (d) oraz (e) w języku operacji elementarnych wyko-
nanych na A.
13.10. Wykazać, że dla dowolnego zbioru A ⊂ K
n
n
i dla dowolnej macierzy A ∈ K
n
n
, A jest przemienna
z każdą macierzą ze zbioru A wtedy i tylko wtedy, gdy A jest przemienna z każdą macierzą ze
zbioru lin(A).
13.11. Macierze postaci aI
n
, a ∈ K, nazywamy macierzami skalarnymi. Wykazać, że macierz A ∈ K
n
n
jest przemienna z wszystkimi macierzami ze zbioru K
n
n
wtedy i tylko wtedy, gdy A jest macierzą
skalarną.
13.12. Obliczyć wyznacznik macierzy
(a) A =
h
1
4
6
5
3
1
7
8
9
i
|
·
h
1
4
6
5
3
1
7
8
9
i
,
(b) B =
a
b
c
d
−b
a
d
−c
−c
−d
a
b
−d
c
−b
a
.
Wskazówka. Obliczyć wyznaczniki macierzy A
2
oraz BB
|
.
13.13. Niech x
1
, x
2
, . . . , x
n
będą wszystkimi pierwiastkami wielomianu f (X) = a
0
X
n
+ a
1
X
n−1
+ · · · +
a
n−1
X + a
n
. Sumy k-tych potęg pierwiastków
s
k
= x
k
1
+ x
k
2
+ · · · + x
k
n
ALGEBRA LINIOWA I GEOMETRIA 1
41
są funkcjami symetrycznymi, więc wyrażają się przez współczynniki wielomianu (np. s
0
= n; z
wzorów Viète
wynikają równości s
1
= −
a
1
a
0
, s
2
= s
2
1
− 2
X
i<j
x
i
x
j
=
a
2
1
a
2
0
− 2
a
2
a
0
itd.)
Obliczyć wyznacznik D macierzy
s
0
s
1
s
2
· · ·
s
n−1
s
1
s
2
s
3
· · ·
s
n
s
2
s
3
s
4
· · ·
s
n+1
..
.
..
.
..
.
. .
.
..
.
s
n−1
s
n
s
n+1
· · ·
s
2n−2
.
(Wskazówka: obliczyć najpierw V
|
V , gdzie V = V (x
1
, x
2
, . . . , x
n
) jest macierzą Vandermonde’a
pierwiastków ).
Wyrazić wynik przez współczynniki wielomianu f (X) gdy n = 2 i f (X) = aX
2
+ bX + c i gdy
n = 3, a f (X) = X
3
+ pX + q.
Wartość ∆ = a
2n−2
0
D nazywamy wyróżnikiem wielomianu f (X)
13.14. Sprawdzić, czy następujące macierze są odwracalne oraz w przypadku pozytywnej odpowiedzi
obliczyć macierz odwrotną:
(a)
"
1
2
2
5
#
, (b)
1
2
−3
0
1
2
0
0
1
, (c)
1
3
−5
7
0
1
2
−3
0
0
1
2
0
0
0
1
, (d)
1
1
1
1
1
1
−1
−1
1
−1
1
−1
1
−1
−1
1
,
(e)
2
3
2
1
−1
0
−1
2
1
.
13.15. Jeśli A ∈ K
n
n
, B ∈ K
m
m
, C ∈ K
m
n
, D ∈ K
n
m
, i det A 6= 0 to
(a) obliczyć
"
I
n
0
−CA
−1
I
m
#
·
"
A
D
C
B
#
;
(b) wykazać, że det
"
A
D
C
B
#
= det A · det(B − CA
−1
D);
(c) podzielić na klatki 2 × 2 macierz z przykładu (d) z poprzedniego zadania; porównać jej
wyznacznik z wartością wyrażenia det A det B − det C det D.
13.16. Rozwiązać następujące równania macierzowe:
(a) X
"
4
1
0
4
#
=
"
4
−6
2
1
#
,
(b)
"
4
1
0
4
#
X =
"
4
−6
2
1
#
,
14
François Viète (1540-1603) - matematyk francuski, zwany ”ojcem algebry”. Usystematyzował osiągnięcia alge-
braiczne Odrodzenia. Wprowadził oznaczenia literowe nie tylko dla niewiadomych, ale i dla danych, np. współczyn-
ników równań, dzięki czemu pojawiły sie wzory matematyczne.
15
Nazwa ”wyróżnik” (”discriminant”, od łacińskiego discriminans, od discriminantis - rozdzielający, odróżnia-
jący) pochodzi od J. Sylvestera.

42
MAREK SZYJEWSKI
(c) X
1
1
−1
2
1
0
1
−1
1
=
1
−1
3
4
3
2
1
−2
5
,
(d)
"
2
1
3
2
#
X
"
−3
1
1
1
#
=
"
−2
4
3
−1
#
.
13.17. Rozwiązać układy równań macierzowych:
(a)
"
2
1
1
1
#
X +
"
3
1
2
1
#
Y =
"
2
8
0
5
#
"
3
−1
−1
1
#
X +
"
2
1
−1
−1
#
Y =
"
4
9
−1
−4
#
,
(b)
"
1
1
−1
1
#
X +
"
3
1
1
1
#
Y =
"
3
5
1
1
#
"
1
−1
1
1
#
X +
"
1
1
1
3
#
Y =
"
1
1
5
3
#
.
13.18. Obliczyć (I + aE
ir
)
−1
, i 6= r.
13.19. Wiadomo, że macierz odwracalną można ”sprowadzić” do macierzy jednostkowej za pomocą przek-
ształceń elementarnych na wierszach. Pokazać, że wykonując te same przekształcenia (w tej samej
kolejności!) na macierzy jednostkowej otrzymamy macierz odwrotną do wyjściowej macierzy. Sto-
sując tę metodę obliczyć macierze odwrotne do macierzy z zadania
oraz następujących
macierzy:
(a)
0
1
1
· · ·
1
1
0
1
· · ·
1
1
1
0
· · ·
1
..
.
..
.
..
.
. .
.
..
.
1
1
1
· · ·
0
, (b)
1
−1
0
· · ·
0
0
−1
2
−1
· · ·
0
0
0
−1
2
· · ·
0
0
..
.
..
.
..
.
. .
.
..
.
..
.
0
0
0
· · ·
2
−1
0
0
0
· · ·
−1
1
,
(c)
2
−1
0
· · ·
0
0
−1
2
−1
· · ·
0
0
0
−1
2
· · ·
0
0
..
.
..
.
..
.
. .
.
..
.
..
.
0
0
0
· · ·
2
−1
0
0
0
· · ·
−1
1
.
13.20. (a) Pokazać, że jeżeli A
2
= 0, to macierz I
n
+ A jest odwracalna i (I
n
+ A)
−1
= I
n
− A.
(b) Pokazać, że jeżeli A
m
= 0, to macierz I
n
+ A jest odwracalna i znaleźć (I
n
+ A)
−1
.
ALGEBRA LINIOWA I GEOMETRIA 1
43
13.21. Znaleźć kolejne potęgi macierzy
0
1
0
· · ·
0
0
0
1
· · ·
0
..
.
..
.
..
.
. .
.
0
0
0
0
· · ·
1
0
0
0
· · ·
0
i wykorzystać je do obliczenia macierzy
odwrotnej do macierzy
1
1
1
· · ·
1
1
0
1
1
· · ·
1
1
0
0
1
· · ·
1
1
..
.
..
.
..
.
. .
.
..
.
..
.
0
0
0
· · ·
1
1
0
0
0
· · ·
0
1
.
13.22. Pokazać, że dla A, B ∈ K
n
n
jeżeli macierz I
n
+ AB jest odwracalna, to również macierz I
n
+ BA
jest odwracalna (lemat Vassersteina
) Wskazówka: Obliczyć (I
n
+ BA)(I
n
− B(I
n
+ AB)
−1
A).
13.23. Obliczyć macierze odwrotne do macierzy klatkowych:
"
A
D
0
B
#
,
"
A
0
C
B
#
. Obliczyć macierze
odwrotne do następujących macierzy:
2
1
0
0
3
2
0
0
1
1
3
4
2
−1
2
3
,
1
1
1
3
1
0
1
1
−1
2
0
0
1
2
1
0
0
0
1
0
0
0
0
1
1
.
13.24. Komutatorem [A, B] macierzy nieosobliwych A, B ∈ GL
n
(K) nazywamy macierz [A, B] =
ABA
−1
B
−1
. Wykazać, że
[I + aE
ij
, I + bE
kl
] =
I
dla j 6= k i i 6= l
I + abE
il
dla j = k i i 6= l
I − abE
kj
dla j 6= k i i = l
.
§ 14. Układy równań
14.1. Do układu równań należą wszystkie równania x + ny + nz = 1dla n ∈ N. Znaleźć równoważny mu
układ o najmniejszej ilości równań i rozwiązać go.
14.2. Z Księgi I ”Arytmetyki ” Diofantosa z Aleksandrii
(ok. 250 r.):
16
L. N. Vasserstein, współczesny matematyk radziecki (do lat siedemdziesiątych) i amerykański (od lat
osiemdziesiątych XX w.).
17
Diofantos (zapewne III w.) - matematyk grecki z Aleksandrii. Brak danych o jego życiu. Zachowało się 6 z 13
ksiąg "Arytmetyki " i fragmenty książki o liczbach wielokątnych. W "Arytmetyce" Diofantos podał prawa działań
na liczbach względnych i wprowadził niewiadomą - symbol literowy uczestniczcy w działaniach na równi z liczbami
i w zgodzie z prawami działań.
44
MAREK SZYJEWSKI
(a) ”Zadanie 16. Znaleźć trzy takie liczby, aby dodane parami dawały dane liczby. Potrzeba,
by połowa sumy danych liczb była większa od każdej z nich.”
(Dla danych a, b, c rozwiązać układ równań
y + z = a
x
+ z = b
x + y
= c
).
(b) ”Zadanie 17. Znaleźć cztery takie liczby, żeby dodane po trzy dawały dane liczby.”
(Dla danych a, b, c, d rozwiązać układ równań
y + z + t = a
x
+ z + t = b
x + y
+ t = c
x + y + z
= d
).
(c) ”Zadanie 18. Znaleźć trzy takie liczby, aby dodane parami przewyższay pozostałą o daną
liczbę.” (Dla danych a, b, c rozwiązać układ równań
y + z = a + x
x
+ z = b + y
x + y
= c + z
).
(d) ”Zadanie 19. Znaleźć cztery takie liczby, żeby dodane po trzy przewyższały pozostałą o
daną liczbę.” (Dla danych a, b, c, d rozwiązać układ równań
y + z + t = a + x
x
+ z + t = b + y
x + y
+ t = c + z
x + y + z
= d + t
).
(e) ”Zadanie 20. Daną liczbę rozłożyć na trzy liczby tak, by każda ze skrajnych, dodana
do środkowej miała dany stosunek do pozostałej.” (Dla danych a, k, m rozwiązać układ równań
x + y + z = a
x + y = kz
y + z = mx
).
(f ) ”Zadanie 22. Znaleźć trzy takie liczby, które staną się równe, gdy każda odda następnej
daną swoją część.” (Dla danych niezerowych a, b, c rozwiązać układ równań
1 −
1
a
x +
1
c
z =
1 −
1
b
y +
1
a
x = 1 −
1
c
z +
1
b
y).
14.3. Wyznaczyć wszystkie rzeczywiste wartości niewiadomych x, y, z, t dla których:
(a)
x + 4y + 10z + 20t = x
−6y − 20z − 45t = y
4y + 15z + 36t = z
−y − 4z − 10t = t
,
(b)
x + 4y + 10z + 20t = −x
−6y − 20z − 45t = −y
4y + 15z + 36t = −z
−y − 4z − 10t = −t
.
14.4. Rozwiązać układ równań
20x − 10y + 4z
− t = a
70x − 36y + 15z − 4t = b
84x − 45y + 20z − 6t = c
35x − 20y + 10z − 4t = d
w zależności od parametrów
a, b, c, d ∈ R.
§ 15. Zadania różne: łamigłówki
Gaszenie świateł
ALGEBRA LINIOWA I GEOMETRIA 1
45
Wiadomości z algebry liniowej pozwalają łatwo rozwiązywać łamigówki określonego typu: kom-
puter wyświetla na ekranie planszę podzieloną na kwadratowe pola, ponumerowane np. literami
alfabetu; pola mogą mieć jeden z dwóch kolorów (np. biały lub czarny); nacinięcie klawisza z literą,
będącą numerem pola powoduje zmianę kolorów określonych pól na przeciwny; celem grajcego jest
uzyskanie jednobarwnej planszy za pomocą najmniejszej ilości naciśnięć klawiszy.
Przykład: Plansza jest kwadratem o dziewięciu polach:
A
B
C
D
E
F
G
H
I
Pola mogą być białe albo czarne, pocztkowy układ kolorów losuje komputer. Nacinięcie klawisza
oznaczonego literą A - I powoduje, że zacienione pola zmieniają kolor na przeciwny (jeśli któreś
było białe, to stanie się czarne, a jeśli było czarne, to stanie się białe):
A
B
C
D
A
B
C
D
E
F
G
H
I
A
B
C
D
E
F
G
H
I
A
B
C
D
E
F
G
H
I
A
B
C
D
E
F
G
H
I
E
F
G
H
A
B
C
D
E
F
G
H
I
A
B
C
D
E
F
G
H
I
A
B
C
D
E
F
G
H
I
A
B
C
D
E
F
G
H
I
I
A
B
C
D
E
F
G
H
I
Jakie klawisze trzeba nacisnąć, by z pocztkowego stanu z czarnymi narożnymi polami :
A
B
C
D
E
F
G
H
I
uzyskać stan wszystkie pola białe? (Odpowiedź: wszystkie, każdy jeden raz ).
Wybierzmy jedno pole X i zastanówmy się nad zmianami jego barwy przy naciskaniu klawiszy.
Ponumerujemy kolory elementami ciała Z
2
: biały - 0, czarny - 1.
Jeśli naciśniemy klawisz,
wpływający na kolor danego pola, to numer x koloru pola X zmieni się na x + 1. Jeśli naciśniemy
klawisz nie wpływający na kolor danego pola X (w powyższym przykładzie dla X =A będzie to
jeden z klawiszy C, E, F, G, H, I, a dla X =E jeden z klawiszy B, D, F, H), to numer x koloru nie
zmieni się, tzn. z x zrobi się x + 0. Jak widać, przy naciśnięciu kolejno dwóch klawiszy kolejność
nie ma znaczenia, a dwukrotne naciśnięcie tego samego klawisza daje efekt zerowy (nie zmienia
koloru x pola X). Stan planszy można zapisać jako wektor v z przestrzeni Z
9
2
: jego współrzędne
to numery kolorów kolejnych pól. Zmiana stanu planszy po naciśnięciu klawisza polega na dodaniu
do wektora v wektora, który ma jedynki na współrzędnych odpowiadajcych polom, na które dany
46
MAREK SZYJEWSKI
klawisz wpływa i zera na pozostałych współrzędnych. W powyższym przykładzie tymi wektorami
są:
u
A
=
1
1
0
1
1
0
0
0
0
, u
B
=
1
1
1
0
0
0
0
0
0
, u
C
=
0
1
1
0
1
1
0
0
0
, u
D
=
1
0
0
1
0
0
1
0
0
, u
E
=
0
1
0
1
1
1
0
1
0
, u
F
=
0
0
1
0
0
1
0
0
1
,
u
G
=
0
0
0
1
1
0
1
1
0
, u
H
=
0
0
0
0
0
0
1
1
1
, u
I
=
0
0
0
0
1
1
0
1
1
.
15.1. Wykazać, że sprawdzenie, czy ze stanu danego wektorem v można uzyskać stan dany wektorem w
polega na sprawdzeniu, czy v + w ∈ lin(u
A
, u
B
, u
C
, u
D
, u
E
, u
F
, u
G
, u
H
, u
I
).
15.2. Opracować algorytm znajdowania ciągu klawiszy, które trzeba nacisnąć, aby ze stanu danego wek-
torem v uzyskać stan dany wektorem w.
15.3. Jedenaście monet ułożono w rzędzie reszkami do góry. Dopuszczalny ruch to jednoczesne odwrócenie
trzech sąsiednich monet. Możliwie najmniejszą ilością ruchów należy uzyskać układ, w którym
każde dwie sąsiednie monety będą zwrócone do góry przeciwną stroną: o-r-o-r-o... albo r-o-r-o-r...
(a) Który z tych układów jest możliwy do siągnięcia?
(b) Podać najkrótszy zestaw ruchów, prowadzący do żądanego układu.
15.4. W grze komputerowej ”Gaszenie świateł” kwadratowa plansza ma 25 pól oznaczonych kolejno literami
od A do Y:
A
B
C
D
E
F
G
H
I
J
K
L
M
N
O
P
Q
R
S
T
U
V
W
X
Y
Naciśnięcie klawisza powoduje zmianę koloru pól: oznaczonego tą literą i tych, które mają z
nim wspólną krawędź. Naciskając odpowiednie klawisze należy ze stanu początkowego - same 0,
uzyskać stan końcowy - same 1.
ALGEBRA LINIOWA I GEOMETRIA 1
47
(a) Wykazać, że jeśli rozwiązanie istnieje, to istnieje rozwiązanie z liczbą naciśnięć nie przekracza-
jącą 25.
(b) Niech A =
1
1
0
0
0
1
1
1
0
0
0
1
1
1
0
0
0
1
1
1
0
0
0
1
1
∈ (Z
2
)
5
5
, I =
1
0
0
0
0
0
1
0
0
0
0
0
1
0
0
0
0
0
1
0
0
0
0
0
1
∈ (Z
2
)
5
5
,
y
1
=
x
1
x
2
x
3
x
4
x
5
, . . ., y
5
=
x
21
x
22
x
23
x
24
x
25
, P =
1
1
1
1
1
∈ Z
5
2
. Sprawdzić, że rozwiązanie tej łamigłówki jest
równoważne rozwiązaniu układu pięciu równań z pięcioma niewiadomymi wektorami y
1
, ..., y
5
:
A
I
0
0
0
I
A
I
0
0
0
I
A
I
0
0
0
I
A
I
0
0
0
I
A
·
y
1
y
2
y
3
y
4
y
5
=
P
P
P
P
P
.
(c) Sprawdzić, że istnieją cztery rozwiązania.
(d) Znaleźć wszystkie cztery rozwiązania.
§ 16. Przekształcenia liniowe
16.1. Które z podanych niżej przekształceń ϕ : K
n
→ K
m
są przekształceniami liniowymi:
(a) n = m = 3, ϕ(
x
y
z
) =
x + z
2x + z
3x − y + z
, (b) n = m = 3, ϕ(
x
y
z
) =
x
y + 1
z + 2
,
(c) n = m = 3, ϕ(
x
y
z
) =
2x + y
x + z
z
, (d) n = m = 3, ϕ(
x
y
z
) =
x − y + z
z
y
,
(e) n = 4, m = 3, ϕ(
x
y
z
t
) =
x − y + 2t
2x + 3y + 5z − t
x + z − t
,
(f ) n = 4, m = 3, ϕ(
x
y
z
t
) =
x − y + 2t
2x − 3y + 5z − t
x − z − t
,

48
MAREK SZYJEWSKI
(g) n = m = 4, ϕ(
x
y
z
t
) =
x + 3y − 2t
x + y + z
2y + t
y + z
,
(h) n = m = 4, ϕ(
x
y
z
t
) =
x + 3y − 2t
x + y + z
2y − 3t
2x + 4y + z − 2t
,
(i) n = m = 3, ϕ(
x
y
z
) =
x + z
2xz
3x − y + z
.
W przypadku, gdy przekształcenie ϕ jest przekształceniem liniowym, zbadać czy jest to monomor-
fizm, epimorfizm.
16.2. Niech a
0
, a
1
, a
2
, . . . , a
n
∈ K, n ∈ N. Wykazać, że ψ : K[X]
m
→ K
n+1
określone wzorem:
ψ(w(X)) = [w(a
0
), w(a
1
), . . . , w(a
n
)] dla w(X) ∈ K[X]
m
,
jest przekształceniem liniowym. Sprawdzić, że gdy a
0
, a
1
, a
2
, . . . , a
n
są parami różne, to:
(a) ψ jest na ⇔ m≥n,
(b) ψ jest różnowartościowe ⇔ m ≤ n.
16.3. Wykazać, że jeżeli ϕ : K → K jest przekształceniem liniowym, to istnieje a ∈ K takie, że ϕ(v) =
av dla każdego v ∈ K. Dla jakich a przekształcenie dane takim wzorem jest monomorfizmem,
epimorfizmem ?
16.4. Ciało C liczb zespolonych można rozpatrywać jako przestrzeń wektorową nad ciałem C (ozn. C
1
) oraz
jako przestrzeń wektorową nad ciałem R liczb rzeczywistych (ozn. C
R
). Wykazać, że f : C → C,
f (z) = z, jest endomorfizmem przestrzeni C
R
, ale nie jest endomorfizmem przestrzeni C
1
.
16.5. Sprawdzić, czy odwzorowanie ślad macierzy tr : K
n
n
→ K określone wzorem
tr
a
11
a
12
· · ·
a
1n
a
21
a
22
· · ·
a
2n
..
.
..
.
. .
.
..
.
a
n1
a
n2
· · ·
a
nn
=
n
X
i=1
a
ii
jest przekształceniem liniowym.
16.6. (a) W przestrzeni R
∞
niech U będzie podzbiorem, złożonym z ciągów spełniających warunek
Cauchy’ego:
(a
n
) ∈ U ⇔ ∀
ε>0
∃
N ∈N
∀
p>N
∀
q>N
[|a
p
− a
q
| < ε] .
Wykazać, że U jest podprzestrzenią i odwzorowanie ϕ : U → R określone wzorem ϕ((a
n
)) =
lim
n→∞
(a
n
) jest przekształceniem liniowym.
(b) Niech ψ : R
∞
→ R
∞
będzie odwzorowaniem określonym przez warunek:
(b
n
) = ψ((a
n
)) ⇔
∀
n∈N
"
b
n
=
n
X
k=1
a
k
#

ALGEBRA LINIOWA I GEOMETRIA 1
49
(czyli ψ((a
n
)) = (a
1
, a
1
+a
2
, a
1
+a
2
+a
3
, ...)). Sprawdzić, że ψ jest przekształceniem liniowym. Czy
ψ jest monomorfizmem? epimorfizmem? Czy przekształcenie odwrotne do ψ jest przekształceniem
liniowym?
(c) Niech W = ψ
−1
(U ). Sprawdzić, że wzór
σ((a
n
)) =
∞
X
n=1
a
n
określa odwzorowanie σ : W → R i że σ jest przekształceniem liniowym.
Sprawdzić, że σ = ϕ ◦ ψ.
16.7. Sprawdzić, że dla dowolnych liczb rzeczywistych a, b, a < b odwzorowanie C
0
([a, b]) → R przestrzeni
funkcji ciągłych określone wzorem f 7→
b
R
a
f (x)dx jest przekształceniem liniowym.
16.8. Symbolem C
n
(a, b) oznaczamy przestrzeń funkcji rzeczywistych określonych na przedziale (a, b) i
mających pochodne ciągłe do rzędu n włącznie. Sprawdzić, że dla każdego n > 0 odwzorowanie
C
n
(a, b) → C
n−1
(a, b) określone wzorem f 7→ f
0
jest przekształceniem liniowym. Czy jest ono
epimorfizmem? monomorfizmem?
16.9. Niech V oraz W będą przestrzeniami liniowymi nad ciałem K, a ϕ : V → W odwzorowaniem.
Wykresem odwzorowania ϕ nazywamy zbiór Γϕ = {(v, ϕ(v)) ∈ V × W : v ∈ V }. Wykazać, że
ϕ jest przekształceniem liniowym wtedy i tylko, gdy Γϕ jest podprzestrzenią przestrzeni liniowej
V × W .
16.10. Niech V oraz W będą przestrzeniami liniowymi nad ciałem K, i niech ϕ : V → W będzie przek-
ształceniem liniowym. Niech
b
ϕ : V → V × W będzie określone wzorem
b
ϕ(v) = (v, ϕ(v)), a
π : V × W → W wzorem π(v, w) = w. Sprawdzić, że
b
ϕ i π są przekształceniami liniowymi,
b
ϕ jest
monomorfizmem, π jest epimorfizmem i że π ◦
b
ϕ = ϕ.
16.11. Wykazać, że dla dowolnego przekształcenia liniowego ϕ : V → W istnieje przestrzeń liniowa Z oraz
epimorfizm κ : V → Z i monomorfizm ϕ : Z → W takie, że ϕ = ϕ ◦ κ. Dla jakiego przekształcenia
liniowego ϕ można zamienić miejscami słowa ”epimorfizm” oraz ”monomorfizm”?
16.12. Przypuśćmy, że V, W
1
, W
2
są przestrzeniami liniowymi nad ciałem K. Funkcję f : V → W
1
× W
2
można zapisać przy pomocy pary funkcji f
1
: V → W
1
oraz f
2
: V → W
2
wzorem f (v) =
(f
1
(v), f
2
(v)). Wykazać, że f jest przekształceniem liniowym wtedy i tylko wtedy, gdy f
1
i f
2
są
przekształceniami liniowymi.
16.13. Załóżmy, że A, B, C są zbiorami, ∅ 6= B, C ⊂ A oraz V jest przestrzenią liniową.
(a) Pokazać, że odwzorowanie Φ
B
: V
A
→ V
B
, f 7→ f |
B
dla f ∈ V
A
, jest przekształceniem
liniowym . Kiedy jest to epimorfizm, a kiedy monomorfizm ?
(b) Z punktu (a) oraz poprzedniego zadania wynika, że Φ : V
A
→ V
B
× V
C
dane wzorem
Φ(f ) = (Φ
B
(f ), Φ
C
(f )) dla f ∈ V , jest przekształceniem liniowym. Kiedy Φ jest monomorfizmem,
a kiedy epimorfizmem?
16.14. Niech V, V
1
, V
2
, W będą przestrzeniami liniowymi oraz niech V = V
1
⊕V
2
. Pokazać, że dla dowolnych
przekształceń liniowych ϕ
i
: V
i
→ W , i = 1, 2, istnieje dokładnie jedno przekształcenie liniowe
ϕ : V → W takie, że ϕ |
V
i
= ϕ
i
. Jeżeli V = W oraz ϕ
1
= Id
V
1
, ϕ
2
= −Id
V
2
to ϕ nazywamy
symetrią względem V
1
wzdłuż (albo równolegle do) V
2
. Jeżeli natomiast ϕ
1
= Id
V
1
, a ϕ
2
jest

50
MAREK SZYJEWSKI
endomorfizmem zerowym, to ϕ nazywamy rzutem przestrzeni V na V
1
wzdłuż (albo równolegle
do) V
2
.
16.15. Wykazać, że:
(a) jeśli V = V
1
⊕ V
2
, to V ∼
= V
1
× V
2
,
(b) jeśli V = V
1
⊕ · · · ⊕ V
n
, to V ∼
= V
1
× · · · × V n .
16.16. Znaleźć jądra i obrazy przekształceń liniowych z zadań
oraz
16.17. Znaleźć jądro i obraz symetrii (rzutu) wzlędem V
1
(na V
1
) wzdłuż V
2
.
16.18. Przekształcenie liniowe ϕ : K
2
→ K
3
dane jest wzorem ϕ(
"
x
y
#
) =
2x + 3y
x − y
3y
. Wyznaczyć:
(a) obrazy podprzestrzeni: K
2
, lin(
"
1
0
#
), lin(
"
0
1
#
), lin(
"
1
1
#
),
{
"
x
y
#
∈ K
2
: 2x + 3y = 0};
(b) przeciwobrazy podprzestrzeni: K
3
, {
0
0
0
}, lin(
2
1
3
), lin(
2
1
0
),
lin(
3
−1
3
,
0
1
0
), {
x
y
z
∈ K
3
: x + y + z = 0}.
16.19. Przypuśćmy, że ϕ : V → W jest przekształceniem liniowym, X jest podprzestrzenią przestrzeni V ,
a Y jest podprzestrzenią przestrzeni W .
(a) Wykazać, że
(i) ϕ
−1
(ϕ(X)) = X+Kerϕ ,
(ii) ϕ(ϕ
−1
(Y )) = Y ∩Imϕ.
(b) Sformułować warunek konieczny i wystarczający na to, aby
(i) ϕ
−1
(ϕ(X)) = X ,
(ii) ϕ(ϕ
−1
(Y )) = Y .
(c) Jaki warunek musi spełniać ϕ, aby dla każdej podprzestrzeni X przestrzeni V zachodziła
równość ϕ
−1
(ϕ(X)) = X?
(d) Jaki warunek musi spełniać ϕ, aby dla każdej podprzestrzeni Y przestrzeni W zachodziła
równość ϕ(ϕ
−1
(Y )) = Y ?
16.20. Wiadomo, że przekształcenie liniowe ϕ : V → W spełnia warunki:
ϕ(α
1
) = β
1
+ 2β
2
+ 3β
3
,
ϕ(α
2
) = 4β
1
+ 5β
2
+ 6β
3
,
ϕ(α
3
) = 7β
1
+ 8β
2
+ 9β
3
oraz że (α
1
, α
2
, α
3
) jest bazą V , a (β
1
, β
2
, β
3
) jest bazą W . Obliczyć wymiar obrazu i wymiar
jądra przekształcenia ϕ.

ALGEBRA LINIOWA I GEOMETRIA 1
51
16.21. Niech ϕ i ψ będą odwzorowaniami K
∞
→ K
∞
takimi, że:
ϕ((a
1
, a
2
, a
3
, ...)) = (0, a
1
, a
2
, a
3
, ...),
ψ((a
1
, a
2
, a
3
, ...)) = (a
2
, a
3
, a
4
, ...).
(a) Sprawdzić, że ϕ i ψ są endomorfizmami przestrzeni K
∞
.
(b) Obliczyć ϕ ◦ ψ i ψ ◦ ϕ.
(c) Sprawdzić, czy ϕ lub ψ jest monomorfizmem, epimorfizmem, izomorfizmem.
§ 17. Przekształcenia liniowe 2
17.1. Czy istnieje przekształcenie liniowe ϕ : R
3
→ R
3
spełniające warunki:
(a) ϕ(
1
1
0
) =
1
0
0
, ϕ(
0
1
1
) =
0
1
0
, ϕ(
1
0
1
) =
0
0
1
, ϕ(
1
1
1
) =
1
1
1
;
(b) ϕ(
1
1
0
) =
1
2
3
, ϕ(
0
1
1
) =
3
2
1
, ϕ(
1
2
1
) =
4
4
4
;
(c) ϕ(
1
1
0
) =
1
2
3
, ϕ(
0
1
1
) =
3
2
1
, ϕ(
1
−2
1
) =
4
4
4
;
(d) ϕ(
1
1
0
) =
1
2
0
, ϕ(
0
1
1
) =
3
0
1
?
W przypadku pozytywnej odpowiedzi przeanalizować liczbę rozwiązań i znaleźć wzór przyna-
jmniej jednego takiego przekształcenia liniowego.
17.2. Skonstruować przekształcenie liniowe τ : R
3
→ R
3
spełniające warunki:
τ (
1
1
2
) =
2
1
1
, τ (
2
1
1
) =
1
1
2
, τ ◦ τ = id
R
3
.
Wyznaczyć wzór analityczny przekształcenia τ .
17.3. Znaleźć wzór analityczny:
(a) symetrii przestrzeni R
2
względem lin(
"
1
2
#
) i wzdłuż lin(
"
0
1
#
);
(b) symetrii przestrzeni R
3
względem lin(
1
1
0
,
0
1
2
) i wzdłuż lin(
1
1
1
);
(c) rzutu przestrzeni R
2
na lin(
"
2
3
#
) wzdłuż lin(
"
−1
1
#
);

52
MAREK SZYJEWSKI
(d) rzutu przestrzeni R
3
na lin(
1
0
1
) wzdłuż lin(
1
1
1
,
−1
1
2
).
17.4. Podać wzór analityczny przekształcenia liniowego ψ : R
3
→ R
3
, o którym wiadomo, że Kerψ =
lin(
1
1
0
,
1
1
1
) oraz Imψ = lin(
1
1
1
). Czy rozwiązanie jest jedyne?
17.5. Przypuśćmy, że V jest przestrzenią liniową nad ciałem K, w którym 1 + 1 6= 0. Załóżmy, że ϕ oraz
ψ są endomorfizmami przestrzeni V .
(a) Wykazać, że ϕ ◦ ϕ =Id
V
wtedy i tylko wtedy, gdy istnieją podprzestrzenie U
1
oraz U
2
przestrzeni V takie, że ϕ jest symetrią względem U
1
i wzdłuż U
2
.
(b) Wykazać, że ψ ◦ ψ = ψ wtedy i tylko wtedy, gdy istnieją podprzestrzenie U
1
oraz U
2
przestrzeni V takie, że ψ jest rzutem V na U
1
wzdłuż U
2
.
17.6. Załóżmy, że ciało K ma q elementów oraz n ∈ N. Obliczyć, ile jest
(a) różnych przekształceń liniowych K
n
→ K
n
;
(b) różnych izomorfizmów liniowych K
n
→ K
n
,
gdy: (i) n = 1, (ii) n = 2, (iii) n = 3, (iv) n jest dowolne.
17.7. Niech V będzie przestrzenią liniową nad K , a odwzorowanie f : V → V niech spełnia warunek:
f (u + v) = f (u) + f (v) dla dowolnych u, v ∈ V .
(a) Wykazać, że jeśli K = Q lub K = Z
p
, to f jest przekształceniem liniowym.
(b) Podać przykład ciała K i przestrzeni liniowej nad nim, gdzie analogiczny rezultat nie
zachodzi.
17.8. Niech V oraz W będą przestrzeniami liniowymi nad ciałem K. Przekształcenie f : V → W nazy-
wamy jednorodnym stopnia 1, gdy f (av) = af (v) dla każdych a ∈ K oraz v ∈ V .
(a) Wykazać, że f jest liniowe, gdy dim V ≤ 1.
(b) Wskazać przestrzenie V i W oraz przekształcenie f : V → W jednorodne stopnia 1 takie,
że dim V = 2 oraz f nie jest przekształceniem liniowym.
17.9. Ciało C jest przestrzenią liniową nad Q (ozn. C
Q
) oraz ciało R jest przestrzenią liniową nad Q (ozn.
R
Q
). Wykazać, że przestrzenie C
Q
oraz R
Q
są izomorficzne.
17.10. Wykazać, że jeżeli U
1
oraz U
2
są podprzestrzeniami przestrzeni V , to
(U
1
+ U
2
)/(U
1
∩ U
2
) ∼
= U
1
/(U
1
∩ U
2
) × U
2
/(U
1
∩ U
2
).
ALGEBRA LINIOWA I GEOMETRIA 1
53
§ 18. Macierze przekształceń liniowych
18.1. W przestrzeni K
3
wybrano bazy A
3
= (
1
1
0
,
−1
2
1
,
1
0
1
) oraz B
3
= (
1
0
0
,
0
1
0
,
0
0
1
),
natomiast w przestrzeni K
4
wybrano bazy A
4
= (
2
1
0
1
,
1
1
−1
1
,
0
1
2
0
,
−2
0
0
0
) oraz B
4
=
(
1
0
0
0
,
0
1
0
0
,
0
0
1
0
,
0
0
0
1
). Znaleźć macierz przekształcenia liniowego ϕ : K
n
→ K
m
w
bazach A
n
oraz B
m
(A
n
oraz A
m
; B
n
oraz B
m
; B
n
oraz A
m
), jeżeli:
(a) n = m = 3, ϕ(
x
y
z
) =
x + z
2x + z
3x − y + z
, (b) n = m = 3, ϕ(
x
y
z
) =
x − y + z
y
z
,
(c) n = 4, m = 3, ϕ(
x
y
z
t
) =
x − y + 2t
2x + 3y + 5z − t
x + z − t
,
(d) n = 4, m = 3, ϕ(
x
y
z
t
) =
x − y + 2t
2x − 3y + 5z − t
x − z − t
,
(e) n = 3, m = 4, ϕ(
x
y
z
) =
x + 3y − 2z
x + y + z
2y
y + z
, (f ) n = 3, m = 4, ϕ(
x
y
z
) =
x + 3y − 2z
x + y + z
2y − 3z
2x + 4y + z
,
18.2. Niech a
0
, a
1
, . . . , a
m
∈ K, n, m ∈ N. Znaleźć macierz przekształcenia liniowego ψ : K[X]
n
→ K
m+1
określonego wzorem:
ψ(w(X)) = (w(a
0
), w(a
1
), . . . , w(a
m
))
dla w(X) ∈ K[X]
n
w bazach: (1, X, X
2
, . . . , X
n
) przestrzeni K[X]
n
wielomianów stopnia ≤ n
oraz bazie standardowej przestrzeni K
m+1
. Jak się ta macierz nazywa, gdy n = m?
18.3. Niech V = R[X]
n
, natomiast przekształcenie δ : V → V niech przyporządkowuje wielomianowi jego
pochodną. Pokazać, że δ jest endomorfizmem przestrzeni V oraz znaleźć macierz δ w bazie:
(a) (1, X, X
2
, . . . , X
n
),
(b) (1, X − c,
(X−c)
2
2!
, . . . ,
(X−c)
n
n!
), gdzie c jest ustaloną liczbą rzeczywistą.
18.4. Niech V będzie podprzestrzenią przestrzeni C
0
(R) wszystkich funkcji rzeczywistych ciągłych rozpiętą
przez cos x oraz sin x, a przekształcenie δ niech będzie przekształceniem, przypisującym funkcji jej
54
MAREK SZYJEWSKI
pochodną. Sprawdzić, że δ jest endomorfizmem przestrzeni V oraz znaleźć jego macierz względem
bazy (cos x, sin x).
18.5. Wybierzmy A =
"
a
b
c
d
#
∈ K
2
2
i określmy odwzorowanie y: K
2
2
→ K
2
2
wzorem ψ(B) = BA dla
B ∈ K
2
2
. Wykazać, że ψ jest endomorfizmem przestrzeni K
2
2
i znaleźć macierz tego endomorfizmu
względem bazy (E
11
, E
12
, E
21
, E
22
).
18.6. Niech ϕ : K
3
→ V
1
będzie rzutem, a ψ : K
3
→ K
3
symetrią względem V
1
i wzdłuż V
2
, gdzie:
(a) V
1
= lin(ε
1
, ε
2
), V
2
= lin(ε
1
+ ε
3
),
(b) V
1
= lin(ε
1
, ε
2
), V
2
= lin(ε
2
+ ε
3
),
(c) V
1
= lin(ε
1
+ ε
2
, ε
2
), V
2
= lin(ε
1
+ ε
3
).
W każdym przypadku znaleźć macierz ϕ w bazach (ε
1
, ε
2
, ε
3
) przestrzeni K
3
oraz (ε
1
, ε
2
) przes-
trzeni V
1
. Znaleźć macierz ψ w bazach (ε
1
, ε
2
, ε
3
) oraz (ε
1
, ε
2
, ε
1
+ ε
3
) przestrzeni K
3
. Zwrócić
uwagę, że ψ jest endomorfizmem przestrzeni K
3
i znaleźć macierz tego endomorfizmu w bazie
(ε
1
, ε
2
, ε
3
).
18.7. Niech f : V → W
1
× W
2
, f (v) = (f
1
(v), f
2
(v)) będzie przekształceniem liniowym z zadania 12,
Zestaw
, str.
. Niech A
i
będzie macierzą f
i
w bazach A przestrzeni V oraz B
i
przestrzeni
W
i
. Znaleźć macierz przekształcenia f w bazach A przestrzeni V oraz (B
1
× {θ}) ∪ ({θ} × B
2
)
przestrzeni W
1
× W
2
.
18.8. Niech ϕ : V
1
⊕ V
2
→ W , ϕ(v
1
+ v
2
) = ϕ
1
(v
1
) + ϕ
2
(v
2
), będzie przekształceniem liniowym z zadania
14, Zestaw
, str.
. Niech A
i
będzie macierzą ϕ
i
w bazach A
i
przestrzeni V
i
oraz B przestrzeni
W . Znaleźć macierz ϕ wzlędem baz A
1
∪ A
2
przestrzeni V
1
⊕ V
2
oraz B przestrzeni W .
18.9. Przekształcenie liniowe ϕ : K
2
→ K
3
względem baz (
"
1
2
#
,
"
0
−1
#
) oraz (
1
1
1
,
−1
0
1
,
2
0
0
)
ma macierz
1
−1
0
2
3
−2
.Znaleźć wzór (analityczny) na ϕ(
"
x
y
#
).
18.10. Endomorfizm ψ przestrzeni K ma w bazie (ε
1
, ε
2
, ε
1
+ ε
3
) macierz
1
1
1
−1
0
2
3
2
4
. Znaleźć wzór
analityczny opisujący ψ.
18.11. Endomorfizm ψ przestrzeni R
3
ma w bazie (ε
1
− ε
2
, ε
2
, ε
1
+ ε
3
) macierz
1
2
1
−1
0
2
3
2
1
. Znaleźć
bazę jądra i bazę obrazu przekształcenia ψ. Czy wektor
1
1
−1
należy do jądra ψ? Jaki jest
obraz wektora
0
1
0
?
ALGEBRA LINIOWA I GEOMETRIA 1
55
18.12. Niech A będzie macierzą przekształcenia liniowego γ : V → W względem bazy A przestrzeni V
oraz bazy B przestrzeni W . Jak się zmieni macierz A, gdy:
(a) w bazie A zamienimy i-ty wektor z j-tym?
(b) w bazie A zastąpimy i-ty wektor jego iloczynem przez skalar a 6= 0?
(c) w bazie A dodamy do j-tego wektora wektor i-ty pomnożony przez skalar a 6= 0?
(d) w bazie B zamienimy k-ty wektor z l-tym?
(e) w bazie B zastąpimy k-ty wektor jego iloczynem przez skalar a 6= 0?
(f ) w bazie B dodamy do l-tego wektora wektor k-ty pomnożony przez skalar a 6= 0?
18.13. Niech A będzie macierzą endomorfizmu γ przestrzeni V względem bazy A przestrzeni V . Jak się
zmieni macierz A, gdy:
(a) w bazie A zamienimy i-ty wektor z j-tym?
(b) w bazie A zastąpimy i-ty wektor jego iloczynem przez skalar a 6= 0?
(c) w bazie A dodamy do j-tego wektora wektor i-ty pomnożony przez skalar a 6= 0?
18.14. Endomorfizm γ przestrzeni R
4
ma względem bazy standardowej macierz
1
2
0
1
3
0
−1
2
2
5
3
1
1
2
1
3
. Znaleźć
możliwie szybko macierz γ względem bazy:
(a) (ε
1
, ε
3
, ε
2
, ε
4
),
(b) (ε
1
, ε
1
+ ε
2
, ε
1
+ ε
2
+ ε
3
, ε
1
+ ε
2
+ ε
3
+ ε
4
).
18.15. Endomorfizm λ przestrzeni V nazywamy homotetią, jeżeli istnieje skalar a taki, że λ(v) = av dla
każdego v ∈ V . Wykazać, że
(a) λ jest homotetią ⇔ λ ◦ ϕ = ϕ ◦ λ dla każdego ϕ ∈End(V ),
(b) λ jest homotetią ⇔ λ ma taką samą macierz względem każdej bazy V .
18.16. Macierz przekształcenia ϕ : K
3
→ K
3
w bazie (ε
1
, ε
2
, ε
3
) ma postać
(a)
∗
∗
0
∗
∗
0
∗
∗
1
,
(b)
∗
∗
0
∗
∗
0
∗
∗
0
,
(c)
∗
∗
0
∗
∗
0
0
0
∗
.
Jakie własności przekształcenia ϕ można stąd odczytać ?
18.17. Udowodnić, że macierz przekształcenia ϕ : K
n
→ K
n
w bazie (ε
1
, ε
2
, . . . , ε
n
)
(a) ma postać
"
A
C
0
B
#
dla pewnej macierzy A stopnia k wtedy i tylko wtedy, gdy
ϕ(lin(ε
1
, ε
2
, . . . , ε
k
)) ⊂ lin(ε
1
, ε
2
, . . . , ε
k
);
(b) ma postać
"
A
0
0
B
#
dla pewnej macierzy A stopnia k i pewnej macierzy B stopnia
n − k wtedy i tylko wtedy, gdy ϕ(lin(ε
1
, ε
2
, . . . , ε
k
)) ⊂ lin(ε
1
, ε
2
, . . . , ε
k
) i ϕ(lin(ε
k+1
, . . . , ε
n
)) ⊂
lin(ε
k+1
, . . . , ε
n
).
18.18. W przestrzeni R
n
dane są bazy A oraz B. Oznaczmy przez E bazę standardową (ε
1
, ε
2
, . . . , ε
n
).
Znaleźć macierze przejścia od E do A, od E do B, od A do E oraz od A do B, gdy:

56
MAREK SZYJEWSKI
(a) n = 2, A = (
"
1
2
#
,
"
−3
5
#
), B = (
"
−1
6
#
,
"
0
4
#
);
(b) n = 3, A = (
8
−6
7
,
−16
7
−13
,
9
−3
7
), B = (
1
−2
1
,
3
−1
2
,
2
1
2
);
(c) n = 4, A = (
1
0
1
1
,
−1
1
0
0
,
2
0
1
0
,
0
0
0
1
), B = (
1
2
0
0
,
−1
0
2
1
,
1
1
1
1
,
1
0
0
0
).
W każdym z powyższych przypadków zapisać wektor x
1
ε
1
+ · · · + x
n
ε
n
jako kombinację liniową
wektorów bazy A.
18.19. Niech A = (α
1
, α
2
, α
3
), B = (β
1
, β
2
, β
3
) będą bazami przestrzeni C
3
. Znaleźć macierz symetrii
względem V
1
= lin(α
1
, α
2
) i wzdłuż V
2
= lin(α
3
) w bazie B, gdy α
1
=
2
−1
2
, α
2
=
3
0
1
, α
3
=
0
0
1
, β
1
=
1
2
1
, β
2
=
1
1
−1
, β
3
=
1
0
0
. Podobnie dla rzutu na V
1
wzdłuż V
2
( potrak-
towanego jako odwzorowanie C
3
→ C
3
).
18.20. Obliczyć współrzędne wektora
1
1
1
1
w bazie (
1
0
1
1
,
1
0
1
4
,
1
0
−1
0
,
0
1
0
0
) przestrzeni K
4
jeśli charakterystyka ciała K jest różna od 2 i od 3.
18.21. Napisać wzory na zmianę współrzędnych wektorów przy przejściu od bazy
(
1
0
1
1
,
1
1
1
0
,
1
1
0
0
,
1
0
0
−1
)
do bazy
(
1
1
0
0
,
1
0
0
0
,
0
0
1
1
,
0
0
1
−1
)
przestrzeni K
4
jeśli charakterystyka ciała K jest różna od 2.
18.22. Korzystając z wzoru na zmianę macierzy endomorfizmu przy zmianie bazy znaleźć macierz przek-
ształcenia ϕ : K
3
→ K
3
w bazie (ε
1
, ε
2
+ ε
3
, ε
1
+ ε
2
) wiedząc, że macierzą przekształcenia ϕ w
bazie

ALGEBRA LINIOWA I GEOMETRIA 1
57
(a) (ε
1
, ε
2
, ε
3
), (b) (ε
1
+ ε
2
, ε
2
, ε
3
)
jest macierz
1
0
0
0
2
0
0
0
3
.
§ 19. Przestrzenie sprzężone
19.1. Załóżmy, że V jest przestrzenią liniową. Dla dowolnych v, v
1
, v
2
∈ V pokazać, że
(a) v 6= θ ⇔ istnieje funkcjonał f ∈ V
∗
taki, że f (v) 6= 0;
(b) v
1
6= v
2
⇔ istnieje funkcjonał f ∈ V
∗
taki, żef (v
1
) 6= f (v
2
).
Dla dowolnychf, f
1
, f
2
∈ V
∗
pokazać, że
(c) f 6= 0 ⇔ istnieje wektor v ∈ V taki, że f (v) 6= 0;
(d) f
1
6= f
2
⇔ istnieje wektor v ∈ V taki, że f
1
(v) 6= f
2
(v).
19.2. Znaleźć wszystkie f ∈ (R
3
)
∗
takie, że ker f = U , jeżeli
(a) U = {
x
y
z
∈ R
3
: x + 2y − z = 0},
(b) U = lin(
1
2
1
,
−1
0
2
).
19.3. Pokazać, że jeżeli U < V oraz v ∈ V \U , to istnieje fukcjonał f ∈ V
∗
taki, że f (v) 6= 0 oraz f (u) = 0
dla każdego u ∈ U . Znaleźć co najmniej jeden taki funkcjonał f , jeżeli
(a) V = R
2
, U = {
"
x
y
#
∈ R
2
: x + 5y = 0}, v =
"
−2
3
#
,
(b) V = R
2
, U = lin(
"
4
−1
#
), v =
"
1
1
#
,
(c) V = R
3
, U = {
x
y
z
∈ R
3
: x − 3y + z = 0}, v =
1
−2
1
,
(d) V = R
3
, U =
x
y
z
∈ R
3
:
(
x − 3y − z = 0
−x + y + z = 0
, v =
0
1
2
,
(e) V = R
3
, U = lin(
1
2
3
,
−2
0
1
), v =
1
1
1
.
19.4. Dla dowolnego podzbioru U przestrzeni liniowej V (dim V < ∞) oraz dowolnego podzbioru W
przestrzeni V
∗
definiujemy
U
:= {f ∈ V
∗
: f (α) = 0 dla dowolnego α ∈ U }
W
:= {α ∈ V : f (α) = 0 dla dowolnego f ∈ W }.

58
MAREK SZYJEWSKI
Pokazać, że
(a) U
< V
∗
, W
< V ,
(b) jeżeli U < V , to dim U + dim U
= dim V ,
(c) jeżeli U
1
, U
2
< V , to (U
1
= U
2
⇔ U
1
= U
2
),
(d) jeżeli U, U
1
, U
2
< V , to (U
)
= U, (U
1
+ U
2
)
= U
1
∩ U
2
, (U
1
∩ U
2
)
= U
1
+ U
2
.
19.5. Przy oznaczeniach z poprzedniego zadania znaleźć bazę U
, jeżeli
(a) V = R
3
, U = Sol(
x + y + 2z = 0
2x − y + z = 0
x + z = 0
),
(b) V = R
3
, U = lin(
1
3
−1
),
(c) V = K
n
, U jest zbiorem rozwiązań niezależnych równań liniowych jednorodnych
a
i1
x
1
+ · · · + a
in
x
n
= 0,
i = 1, . . . , m.
(d) V = K
n
, (α
1
, . . . , α
m
) jest bazą U .
19.6. Udowodnić, że funkcjonały f
1
, . . . , f
k
określone na n-wymiarowej przestrzeni liniowej V tworzą układ
liniowo niezależny w V
∗
wtedy i tylko wtedy, gdy dim(ker f
1
∩ · · · ∩ ker f
k
) = n − k. Zatem
funkcjonały f
1
, . . . , f
n
tworzą bazę V
∗
wtedy i tylko wtedy, gdy ker f
1
∩ · · · ∩ ker f
k
= {θ}.
19.7. Znaleźć bazę sprzężoną z bazą A przestrzeni liniowej V , jeżeli
(a) V = R
2
, A = (
"
1
1
#
,
"
0
1
#
),
(b) V = R
2
, A = (
1
1
0
,
0
−1
0
,
2
1
1
),
(c) V = R[X]
2
, A = (1, X − 1, (X − 1)
2
).
19.8. Pokazać, że jeżeli f
1
, f
2
są niezerowymi funkcjonałami przestrzeni liniowej V , to istnieje ϕ ∈ Aut(V )
takie, że f
1
= f
2
◦ ϕ.
19.9. Załóżmy, że V i W są przestrzeniami liniowymi , f ∈ V
∗
oraz β ∈ W . Zdefiniujmy odwzorowanie
ϕ : V → W wzorem ϕ(α) := f (α)β dla α ∈ V . Sprawdzić, że ϕ jest przekształceniem liniowym
oraz znaleźć rząd r(ϕ) przekształcenia ϕ.
19.10. Załóżmy, że V i W są przestrzeniami liniowymi , α ∈ V oraz β ∈ W . Zdefiniujmy odwzorowanie
ϕ : V
∗
→ W wzorem ϕ(f ) := f (α)β dla f∈ V
∗
. Sprawdzić, że ϕ jest przekształceniem liniowym
oraz znaleźć r(ϕ).
19.11. Niech (v
1
, . . . , v
n
), (w
1
, . . . , w
m
) będą bazami odpowiednio przestrzeni wektorowych V i W (nad
K). Niech a
ij
∈ K, i = 1, . . . , m, j = 1, . . . , n. Odwzorowanie f : V → W określone jest wzorem
ϕ(v) =
n
X
j=1
m
X
i=1
a
ij
v
∗
j
(v)w
i
.
ALGEBRA LINIOWA I GEOMETRIA 1
59
(a) Sprawdzić, że ϕ jest przekształceniem liniowym;
(b) Znaleć macierz ϕ w bazach (v
1
, . . . , v
n
), (w
1
, . . . , w
m
);
(c) Sprawdzić, że ϕ
∗
(f ) =
n
P
j=1
m
P
i=1
a
ij
f (w
i
)v
∗
j
.
Pokazać, że dla dowolnego przekształcenia liniowego ϕ : V → W istnieją a
ij
∈ K, i = 1, . . . , m,
j = 1, . . . , n takie, że ϕ(v) =
n
P
j=1
m
P
i=1
a
ij
v
∗
j
(v)w
i
. Zastanowić się nad szczególnym przypadkiem :
V = W , v
i
= w
i
, ϕ = id
V
.
19.12. Załóżmy, że (v
1
, . . . , v
n
) tworzy bazę V oraz (f
1
, . . . , f
n
) jest dowolnym układem funkcjonałów
przestrzeni V
∗
. Oznaczmy a
ij
:= f
i
(v
j
). Pokazać, że (f
1
, . . . , f
n
) jest bazą V
∗
wtedy i tylko
wtedy, gdy macierz [a
ij
] jest odwracalna.
19.13. Załóżmy, że (f
1
, . . . , f
n
) tworzy bazę V
∗
oraz (v
1
, . . . , v
n
) jest dowolnym układem wektorów przes-
trzeni V . Oznaczmy b
ij
:= f
i
(v
j
). Pokazać, że (v
1
, . . . , v
n
) jest bazą V wtedy i tylko wtedy, gdy
macierz [b
ij
] jest odwracalna.
19.14. Niech ϕ : V → W będzie przekształceniem liniowym. Pokazać, że macierz przekształcenia ϕ wzglę-
dem bazy (v
1
, . . . , v
n
) przestrzeni V oraz bazy (w
1
, . . . , w
m
) przestrzeni W jest równa [w
∗
i
(ϕ(v
j
)].
19.15. Udowodnić, że
(a) (V ⊕ W )
∗
∼
= V
∗
⊕ W
∗
,
(b) (V × W )
∗
∼
= V
∗
× W
∗
.
19.16. Pokazać, że jeżeli ϕ : V → W jest przekształceniem liniowym, to r(ϕ) = r(ϕ
∗
).
19.17. Pokazać, że jeżeli ϕ ∈ End(V ), to ϕ oraz ϕ
∗
mają te same wielomiany charakterystyczne, wyz-
naczniki i ślady.
19.18. Dla dowolnego przekształcenia liniowego ϕ : V → W definiuje się jego koobraz i kojądro:
coim ϕ := V /ker ϕ,
coker ϕ := W/im ϕ.
(a) Wskazać izomorfizm im ϕ ∼
= coim ϕ.
(b) Pokazać, że ϕ jest monomorfizmem ⇔ coim ϕ = V , ϕ jest epimorfizmem ⇔ coker ϕ = {θ}.
(c) Wskazać izomorfizmy
ker (ϕ
∗
) ∼
= (coker ϕ)
∗
,
im (ϕ
∗
) ∼
= (coim ϕ)
∗
,
coker (ϕ
∗
) ∼
= (ker ϕ)
∗
,
coim (ϕ
∗
) ∼
= (im ϕ)
∗
.
19.19. Dla dowolnych podprzestrzeni U, W < V określamy odwzorowania:
ϕ : (U + W )
∗
→ U
∗
× W
∗
,
ψ : U
∗
× W
∗
→ (U ∩ W )
∗
ϕ(f ) = (f |
U
, f |
W
),
ψ(f, g) = f |
U ∩W
− g|
U ∩W
.
Sprawdzić, że ϕ i ψ są przekształceniami liniowymi. Udowodnić, że ϕ jest monomorfizmem, a ψ
jest epimorfizmem, oraz im ϕ = ker ψ.
19.20. C
R
oznacza zbiór liczb zespolonych traktowany jako przestrzeń wektorowa nad R. Odwzorowanie
ϕ : C
R
→ C
R
∗
określone jest warunkiem:
ϕ(z) = f ⇔
∀
u∈C
R
f (u) =
1
2
(zu + zu)
.
Sprawdzić, że ϕ jest izomorfizmem rzeczywistych przestrzeni wektorowych.

60
MAREK SZYJEWSKI
19.21. Dla przekształcenia liniowego ϕ : V → W udowodnić równoważność:
r(ϕ) = 1 ⇔
∃
f ∈V
∗
∃
w∈W
∀
v∈V
[ϕ(v) = f (v)w] .
19.22. Dla przekształcenia liniowego f : V → W , dim W = m udowodnić, że istnieją f
1
, . . . , f
m
∈ V
∗
i
w
1
, . . . , w
m
∈ W spełniające warunek
∀
v∈V
"
ϕ(v) =
m
X
i=1
f
i
(v)w
i
#
.
§ 20. Wektory własne i wartości własne
20.1. Niech V = V
1
⊕ V
2
będzie przestrzenią liniową nad ciałem K, w którym 1+1 6= 0. Znaleźć wszystkie
podprzestrzenie niezmiennicze rzutu V na V
1
wzdłuż V
2
oraz symetrii V względem V
1
i wzdłuż
V
2
.
20.2. Załóżmy, że ϕ ∈ End(V ). Pokazać, że
(a) jeżeli W < V oraz Im ϕ ⊂ W , to W jest podprzestrzenią niezmienniczą endomorfizmu ϕ.
(b) jeżeli W jest podprzestrzenią niezmienniczą endomorfizmu ϕ, to ϕ(W ) oraz ϕ
−1
(W ) są
również podprzestrzeniami niezmienniczymi endomorfizmu ϕ.
(c) jeżeli W
1
oraz W
2
są podprzestrzeniami niezmienniczymi endomorfizmu ϕ, to W
1
∩ W
2
oraz lin(W
1
∪ W
2
) są również podprzestrzeniami niezmienniczymi endomorfizmu ϕ.
(d) jeżeli ϕ ∈ Aut(V ) oraz W jest podprzestrzenią niezmienniczą ϕ, to W jest podprzestrzenią
niezmienniczą ϕ
−1
.
20.3. Niech a
1
, . . . , a
k
będą parami różnymi liczbami rzeczywistymi. Znaleźć wszystkie podprzestrzenie
niezmiennicze endomorfizmu ϕ ∈ End(R
k
), ϕ(
x
1
..
.
x
k
) =
a
1
x
1
..
.
a
k
x
k
.
20.4. Załóżmy, że ϕ, ψ ∈ End(V ) oraz ϕ ◦ ψ = ψ ◦ ϕ. Pokazać, że jeżeli W jest podprzestrzenią niezmi-
enniczą endomorfizmu ϕ, to ψ(W ) jest również podprzestrzenią niezmienniczą ϕ. Zauważyć, że w
charakterze ψ można wziąć ϕ
k
, k ∈ N.
20.5. Znaleźć wszystkie podprzestrzenie niezmiennicze endomorfizmu ϕ przestrzeni linowej R[X]
n
okreś-
lonego wzorem ϕ(f ) = f
0
, f ∈ R[X]
n
.
20.6. Endomorfizm ϕ ∈ End(C
2
) ma w bazie A = (
"
1
1
#
,
"
0
i
#
) macierz
(a)
"
3
4
5
2
#
; (b)
"
2
1
−1
5
#
.
Znaleźć wartości własne i wektory własne endomorfizmu ϕ. Jakie będzie rozwiązanie, jeżeli
założymy, że A jest bazą standardową ? Jakie będzie rozwiązanie, jeżeli założymy, że ϕ ∈ End(R
2
)?
20.7. Macierz A jest macierzą endomorfizmu ϕ ∈ End(C
n
) w bazie standardowej. Obliczyć wartości oraz
wektory własne endomorfizmu ϕ. Skonstruować (o ile to możliwe) bazę przestrzeni C
n
złożoną z
wektorów własnych ϕ. Znaleźć (o ile to możliwe) macierz C ∈ GL(n, C) taką, że macierz C
−1
AC
jest macierzą diagonalną.

ALGEBRA LINIOWA I GEOMETRIA 1
61
n = 2 :
(a) A =
"
0
2
−3
5
#
;
(b) A =
"
1
1
−1
3
#
;
(c) A =
"
1
2
2
−2
#
;
(d)
A =
"
3
4
5
2
#
,
n = 3 : (e) A =
0
2
1
−2
0
3
−1
−3
0
; (f ) A =
0
0
1
0
1
0
1
0
0
; (g) A =
3
1
0
−4
−1
0
4
−8
−2
,
n = 4 : (h) A =
0
0
0
1
0
0
2
0
0
3
0
0
4
0
0
0
; (i) A =
0
0
0
0
0
0
1
0
0
2
0
0
3
0
0
0
; (j) A =
1
1
2
3
0
2
2
4
0
0
1
−2
0
0
0
2
;
(k) A =
1
1
2
3
0
1
1
2
0
0
2
0
0
0
0
2
; (l) A =
0
1
0
0
0
0
1
0
0
0
0
1
−6
1
7
−1
; (m) A =
1
1
0
0
3
0
1
0
−1
0
0
1
−2
0
0
0
.
20.8. Udowodnić następujące twierdzenie Gerschgorina z 1931 roku: jeśli A = [a
ij
] jest macierzą kwadra-
tową stopnia n nad ciałem C, to wartości własne A leżą w zbiorze G
1
(A) ∪ G
2
(A) ∪ . . . ∪ G
n
(A),
gdzie G
i
(A) jest dyskiem o środku a
ii
i promieniu
P
j6=i
|a
ij
|:
G
i
(A) = {z ∈ C : |a
ii
− z| ≤
X
j6=i
|a
ij
|}.
20.9. Obliczyć wielomian charakterystyczny endomorfizmu, który w pewnej bazie ma macierz postaci
(a)
−a
n−1
−a
n−2
· · ·
−a
1
−a
0
1
0
· · ·
0
0
0
1
· · ·
0
0
..
.
..
.
. .
.
..
.
..
.
0
0
· · ·
1
0
; (b)
0
0
· · ·
0
−a
0
1
0
· · ·
0
−a
1
0
1
· · ·
0
−a
2
..
.
..
.
. .
.
..
.
..
.
0
0
· · ·
1
−a
n−1
.
Czy każdy wielomian unormowany, z dokładnością do znaku, może być wielomianem charak-
terystycznym jakiegoś endomorfizmu ?
20.10. Pokazać, że odwzorowanie ϕ : R[X]
n
→ R[X]
n
określone wzorem ϕ(f (X)) = f (aX + b), gdzie
a, b są ustalonymi liczbami rzeczywistymi, a 6= 0, ±1, jest przekształceniem liniowym. Znaleźć
wszystkie wartości własne endomorfizmu ϕ.
20.11. Załóżmy, że f ∈ K[X]. Pokazać, że
(a) każdy wektor własny endomorfizmu ϕ przestrzeni liniowej V (nad K) jest wektorem włas-
nym endomorfizmu f (ϕ);
(b) jeżeli λ jest wartością własną endomorfizmu ϕ przestrzeni liniowej V (nad K), to f (λ) jest
wartością własną endomorfizmu f (ϕ).
20.12. Znaleźć wartości własne oraz odpowiadające im podprzestrzenie wektorów własnych endomor-
fizmów liniowych rzeczywistych przestrzeni współrzędnych o następujących macierzach w bazie
kanonicznej

62
MAREK SZYJEWSKI
(a)
"
−3
4
2
−1
#
;
(b)
"
1
1
1
−1
#
;
(c)
"
1
2
2
−2
#
;
(d)
"
2
4
5
3
#
;
(e)
5
6
−3
−1
0
1
1
2
−1
;
(f )
0
0
1
0
1
0
1
0
0
;
(g)
0
2
1
−2
0
3
−1
−3
0
.
20.13. Znaleźć wartości własne oraz odpowiadające im podprzestrzenie wektorów własnych endomor-
fizmów liniowych zespolonych przestrzeni współrzędnych o następujących macierzach w bazie
kanonicznej:
(a)
"
−1
2i
−2i
2
#
; (b)
"
0
a
−a
0
#
dla a ∈ R;
(c)
0
1
0
· · ·
0
0
−1
0
1
· · ·
0
0
0
−1
0
· · ·
0
0
..
.
..
.
..
.
. .
.
..
.
..
.
0
0
0
· · ·
0
1
0
0
0
· · ·
−1
0
.
20.14. Załóżmy, że a
2
jest wartością własną endomorfizmu ϕ
2
. Pokazać, że a lub −a jest wartością własną
endomorfizmu ϕ.
20.15. Znaleźć wzór na elementy macierzy A
n
, jeżeli A =
(a)
"
1
2
2
2
#
;
(b)
"
0
2
−3
5
#
;
(c)
"
1
1
−1
3
#
;
(d)
"
1
2
2
−2
#
.
W każdym z przypadków obliczyć A
2005
.
20.16. Znaleźć wzór na n-ty wyraz ciągu a
n
, gdy
(a) a
0
= 0, a
1
= 1, a
n+2
= a
n+1
+ a
n
(ciąg Fibonacci’ego
; uzyskany wzór nosi nazwę wzoru
Bineta
(b) a
0
= 1, a
1
= 2, a
n+2
= 3a
n
− 2a
n+1
.
20.17. Pokazać, że jeżeli ϕ ∈ Aut(V ), to ϕ oraz ϕ
−1
mają te same wektory własne.
20.18. Pokazać, że jeżeli ϕ, ψ ∈ End(V ) oraz ϕ ◦ ψ = ψ ◦ ϕ, to V (a, ϕ) := {α ∈ V : f (α) = aα} jest
podprzestrzenią niezmienniczą endomorfizmu ψ.
20.19. Niech ϕ : C
2
→ C
2
będzie endomorfizmem liniowym. Udowodnić, że istnieje taka baza przestrzeni
C
2
, w której ϕ ma macierz
"
c
1
0
0
c
2
#
lub
"
c
1
1
0
c
1
#
dla pewnych c
1
, c
2
∈ C.
20.20. Dla dowolnych dwóch endomorfizmów ϕ, ψ skończenie wymiarowej przestrzeni wektorowej udowod-
nić, że:
(a) tr(ϕ ◦ ψ) = tr(ψ ◦ ϕ);
18
Fibonacci (wł. filius Bonacci - ”syn Bonaccie’ego”), wł. Leonardo z Pizy, 1180 - 1240, autor Liber Abaci i
Practica Geometriae, sformułował słynne zadanie o rozmnażaniu się królików, które uważa sie za początek jednego
z trzech działów ekologii - teorii populacji; ilość par królików w roku n w tym zadaniu jest n-tym wyrazem ciągu
Fibonacci’ego.
19
Jacques Philippe Marie Binet (1786-1856) - matematyk i astronom francuski; wprowadził termin ” β-funkcja”;
zajmował się również liniowymi równaniami różnicowymi ze zmiennymi współczynnikami.

ALGEBRA LINIOWA I GEOMETRIA 1
63
(b) wielomiany charakterystyczne endomorfizmów ϕ ◦ ψ i ψ ◦ ϕ są równe.
(c) Które z endomorfizmów z zadań 11 i 12 są diagonalizowalne?
20.21. Dla jakich wartości parametrów a, b, c przebiegających zbiór elementów ciała K macierze:
(a)
"
a
c
0
b
#
;
(b)
"
0
a
b
0
#
są diagonalizowalne ?
20.22. Niech K będzie ciałem algebraicznie domkniętym i niech A ∈ K
n
n
. Udowodnić, że
(a) jeśli a
1
, . . . , a
m
są wszystkimi wartościami własnymi A, to dla dowolnej liczby naturalnej
r skalary a
r
1
, . . . , a
r
m
są wszstkimi wartościami własnymi A
r
;
(b) jeśli A jest macierzą nieosobliwą i a
1
, . . . , a
m
są wszystkimi wartościami własnymi A, to
a
1
6= 0, . . . , a
m
6= 0 i a
−1
1
, . . . , a
−1
m
są wszystkimi wartościami własnymi macierzy A
−1
.
20.23. Niech ϕ : R[X]
3
→ R[X]
3
będzie przekształceniem danym wzorem ϕ(f (X)) = ((X + 3)f (X))
0
.
Sprawdzić, że ϕ jest przekształceniem liniowym i obliczyć jego wartości własne i wektory własne.
20.24. Udowodnić, że jeśli endomorfizmy ϕ
1
: V
1
→ V
1
i ϕ
2
: V
2
→ V
2
są diagonalizowalne, to endo-
morfizm Hom(ϕ
1
, ϕ
2
) : Hom(V
1
, V
2
) → Hom(V
1
, V
2
) określony wzorem ψ 7→ ϕ
2
◦ ψ ◦ ϕ
1
też jest
diagonalizowalny. Wyrazić jego wartości własne i wektory własne przez wartości własne i wektory
własne endomorfizmów ϕ
1
, ϕ
2
.
20.25. Niech A będzie podzbiorem przestrzeni endomorfizmów End(V ) przestrzeni wektorowej V nad
algebraicznie domkniętym ciałem skalarów. Załóżmy, że dla każdych ϕ, ψ ∈ A zachodzi równość
ϕ ◦ ψ = ψ ◦ ϕ. Udowodnić, że istnieje wektor α ∈ V , który jest wektorem własnym wszystkich
endomorfizmów ϕ ∈ A.
20.26. Endomorfizm ϕ ∈ End(R
1000000
) określony jest na bazie następująco:
ϕ(ε
1
) = ε
1
,
ϕ(ε
i
) = iε
i
+ ε
i−1
dla i > 1. Wykazać, że ϕ jest diagonalizowalny.
20.27. Niech f (X) ∈ K[X] będzie wielomianem, a ϕ - endomorfizmem przestrzeni wektorowej V . Wykazać,
że jeśli v ∈ V jest wektorem własnym endomorfizmu ϕ należącym do wartości własnej α, to v jest
wektorem własnym f (ϕ) należącym do wartości własnej f (a): ϕ(v) = av ⇒ f (ϕ)(v) = f (a)v.
20.28. Wyznaczyć wszystkie takie macierze A ∈ K
2
2
dla których równanie X
−1
"
1
1
0
1
#
X = A nie ma
rozwiązania.
20.29. Wyznaczyć wartości własne endomorfizmu ψ = ϕ
2
− 2ϕ + 3Id
C
3
, jeśli A =
1
−1
0
2
3
2
1
1
2
jest
macierzą ϕ w bazie kanonicznej przestrzeni C
3
.
20.30. Niech a ∈ Q, M
1
= [a], M
n+1
=
M
n
0
..
.
0
1
0
· · ·
0
1
a
. Wyprowadzić wzór na wyraz ogólny
ciągu det (M
n
).
64
MAREK SZYJEWSKI
20.31. Wyznaczyć wartości własne i wektory własne endomorfizmu ϕ przestrzeni Q
4
, jeśli jego macierz A
względem bazy kanonicznej spełnia równość
1
4
3
2
2
1
4
3
3
2
1
4
4
3
2
1
−1
· A ·
1
4
3
2
2
1
4
3
3
2
1
4
4
3
2
1
=
4
0
0
0
0
1
0
0
0
0
2
0
0
0
0
5
.
20.32. Wyznaczyć dim V (1, ϕ) i dim V (−1, ϕ), sprawdzić, czy ϕ jest diagonalizowalny, gdy ϕ ma w pewnej
bazie macierz A:
(a) A =
1
4
10
20
0
−6
−20
−45
0
4
15
36
0
−1
−4
−10
, V = Q
4
;
(b) A =
10
20
35
56
−20
−45
−84
−140
15
36
70
120
−4
−10
−20
−35
, V = Q
4
;
(c) A =
1
6
20
50
140
140
0
−16
−70
−195
−560
−560
0
26
125
366
1064
1064
0
−31
−154
−460
−1344
−1344
0
4
20
60
176
175
0
4
20
60
175
176
, V = Q
6
.
W każdym przypadku obliczyć A
2
, A
−1
i wielomian charakterystyczny A.
20.33. Wykazać, że dla dowolnego endomorfizmu ϕ ∈ End V , jeśli ϕ
2
= ϕ, to ϕ i Id
V
− ϕ są diagonali-
zowalne.
20.34. W zależności od macierzy A ∈ K
2
2
wyznaczyć wartości własne endomorfizmu ϕ ∈ End K
2
2
określo-
nego wzorem ϕ(X) = A · X.
20.35. Dla macierzy A =
1
4
2
0
−3
−2
0
4
3
(a) wyprowadzić wzór na A
n
;
(b) znaleźć wszystkie rozwiązania X ∈ K
3
3
równania X
2
= A, dla K = Q, R, C, Z
5
, Z
7
.
20.36. Zbiór Q(
3
√
2) = {a + b
3
√
2 + c
3
√
4 : a, b, c ∈ Q} jest podciałem ciała liczb rzeczywistych R.
(a) Sprawdzić, że Q(
3
√
2) jest przestrzenią wektorową nad ciałem Q i znaleźć choć jedną bazę
tej przestrzeni.
(b) Znaleźć wielomian charakterystyczny, wartości własne i wektory własne endomorfizmu ϕ
przestrzeni Q(
3
√
2) gdy ϕ(x) =
3
√
2x.
ALGEBRA LINIOWA I GEOMETRIA 1
65
(c) Wiedząc, że y = 1−
3
√
2+3
3
√
4 jest jedynym rzeczywistym pierwiastkiem wielomianu f (X) =
X
3
− 3X
2
+ 21X − 125, wyznaczyć wielomian charakterystyczny i wartości własne endomorfizmu
ψ przestrzeni Q(
3
√
2) ) takiego, że ψ(x) = yx.
20.37. Sprawdzić, czy endomorfizm, mający względem pewnej bazy macierz A =
0
0
1
5
15
0
1
0
−10
−40
1
0
0
10
45
0
0
0
−5
−24
0
0
0
1
5
jest diagonalizowalny. Obliczyć A
−1
.
20.38. Endomorfizm ϕ przestrzeni C
4
ma względem bazy kanonicznej macierz A =
1
2
3
4
4
1
2
3
3
4
1
2
2
3
4
1
.
(a) Sprawdzić, że wektory
1
1
1
1
,
1
−1
1
−1
,
1
i
−1
−i
,
1
−i
−1
i
są wektorami własnymi ϕ.
(b) Niech P będzie taką macierzą, że P
−1
AP jest macierzą diagonalną. Obliczyć wektory
własne i wartości własne macierzy P P
|
.
20.39. Niech a
0
, a
1
, ..., a
n−1
∈ K. Cyrkulantem lub wyznacznikiem cyklicznym ciągu (a
0
, a
1
, ..., a
n−1
)
nazywamy wyznacznik macierzy A =
a
0
a
1
a
2
· · ·
a
n−1
a
n−1
a
0
a
1
· · ·
a
n−2
a
n−2
a
n−1
a
0
· · ·
a
n−3
..
.
..
.
..
.
. .
.
..
.
a
1
a
2
a
3
· · ·
a
0
. Niech ε będzie pier-
wiastkiem stopnia n z 1 w ciele K (lub pewnym rozszerzeniu tego ciała) i niech f (X) = a
0
+
a
1
X + ... + a
n−1
X
n−1
∈ K[X].
(a) Sprawdzić, że wektor
1
ε
ε
2
..
.
ε
n−1
jest wektorem własnym macierzy A należącym do wartości
własnej f (ε).
(b) Obliczyć wyznacznik macierzy A.
§ 21. Wielomian charakterystyczny i wielomian minimalny endomorfizmu
21.1. Niech A będzie macierzą kwadratową stopnia n. Minorem głównym stopnia r macierzy A nazywamy
każdy wyznacznik macierzy, powstałej z A przez skreślenie n − r wierszy i kolumn o jednakowych
numerach. Oznaczmy symbolem c
r
sumę wszystkich
n
r
minorów głównych stopnia r macierzy

66
MAREK SZYJEWSKI
A. Udowodnić, że
det(A − XI) = c
n
− c
n−1
X + c
n−2
X
2
− + · · · + (−1)
n
X
n
.
Czym są c
n
i c
1
?
21.2. Niech V będzie przestrzenią wektorową skończonego wymiaru, ϕ ∈ End V , a U niech będzie pod-
przestrzenią niezmienniczą endomorfizmu ϕ.
(a) Sprawdzić, że wzór
ϕ(v + U ) = ϕ(v) + U
określa endomorfizm przestrzeni ilorazowej V /U .
(b) Niech f (X), g(X), h(X) będą wielomianami charakterystycznymi endomorfizmów ϕ, ϕ|
U
:
U → U ,ϕ odpowiednio.Udowodnić, że f (X) = g(X) · h(X).
21.3. Niech V będzie przestrzenią wektorową skończonego wymiaru, ϕ ∈ End V , U niech będzie pod-
przestrzenią niezmienniczą endomorfizmu ϕ, a ϕ(v + U ) = ϕ(v) + U - indukowanym endomor-
fizmem przestrzeni ilorazowej V /U .Niech f (X), g(X), h(X) będą wielomianami minimalnymi en-
domorfizmów ϕ, ϕ|
U
: U → U , ϕ odpowiednio.
(a) Wykazać, że h(X)|f (X).
(b) Wykazać, że g(X)|f (X).
(c) Wykazać, że f(X)|g(X)h(X).
(d) Wykazać, że jeśli g(X) i h(X) są względnie pierwsze, to f (X) = g(X)h(X).
(e) Podać przykład, w którym f (X) 6= g(X)h(X).
21.4. (a) Niech A ∈ Q
2
2
. Udowodnić równoważność:
∃
m∈N
[A
m
= 0] ⇔ tr(A) = tr(A
2
) = 0.
(b) Niech B ∈ Q
3
3
. Udowodnić równoważność:
∃
m∈N
[B
m
= 0] ⇔ tr(B) = tr(B
2
) = tr(B
3
) = 0.
21.5. Dla każdego wielomianu f (X) ∈ K[X] symbolem (f (X)) oznaczamy zbiór wszystkich wielomianów
podzielnych przez f (X):
(f (X)) = {f (X)g(X) : g(X) ∈ K[X]}
(a) sprawdzić, że (f (X)) jest podprzestrzenią przestrzeni K[X];
(b) sprawdzić, że jeśli stopień wielomianu f wynosi n, to warstwy 1 + (f (X)), X + (f (X)), . . . ,
X
n−1
+ (f (X)) tworzą bazę przestrzeni ilorazowej K[X]/(f (X));
(c) sprawdzić, że mnożenie przez X: X · (g(X) + (f (X))) = Xg(X) + (f (X)), jest poprawnie
określonym endomorfizmem przestrzeni K[X]/(f (X));
(d) obliczyć macierz mnożenia przez X w bazie z punktu b);
(e) obliczyć wielomian charakterystyczny mnożenia przez X.
21.6. (Twierdzenie Hamiltona - Cayley) Niech A ∈ K
n
n
i f (X) = det(A−XI) = a
0
+a
1
X +...+a
n−1
X
n−1
+
(−1)
n
X
n
będzie wielomianem charakterystycznym macierzy A. Niech B = [bij] będzie macierzą
dołączoną macierzy charakterystycznej A − XI:
b
ij
= (−1)
i+j
det((A − XI)
ji
)
(tym samym B · (A − XI) = det(A − XI) · I = f (X)I). Wykazać, że

ALGEBRA LINIOWA I GEOMETRIA 1
67
(a) b
ij
∈ K[X]
n−1
dla każdego i, j.
(b) Istnieją macierze B
0
, B
1
, ..., B
n−1
∈ K
n
n
takie, że B = B
0
+ B
1
X + ... + B
n−1
X
n−1
.
(c) Udowodnić równości:
B
0
A
=
a
0
I
B
1
A − B
0
=
a
1
I
B
2
A − B
1
=
a
2
I
..
.
B
n−1
A − B
n−2
=
a
n−1
I
B
n−1
=
(−1)
n
I.
(d) Wywnioskować z c), że f (A) = 0.
21.7. Sprawdzić, że wielomianem charakterystycznym macierzy A stopnia 2 jest
f (X) = X
2
− tr(A)X + det(A).
Sprawdzić, że
f (A) = 0.
21.8. Dla dwóch macierzy kwadratowych A, B wyrażenie
[A, B] = AB − BA
nazywamy komutatorem macierzy A, B (jest to komutator elementów algebry, w odróżnieniu od
komutatora elementów grupy z
(a) Sprawdzić, że tr([A, B]) = 0;
(b) Sprawdzić, że dla każdych trzech macierzy kwadratowych A, B, C stopnia 2 zachodzi równość
[[A, B]
2
, C] = 0.
21.9. Dla każdego wektora v ∈ V orbitą v względem endomorfizmu ϕ ∈ End V nazywamy zbiór
{v, ϕ(v), ϕ
2
(v), . . . , ϕ
n
(v), . . .}.
(a) Sprawdzić, że podprzestrzeń generowana przez dowolną orbitę jest podprzestrzenią niezmi-
enniczą.
(b) Wykazać, że najmniejszą podprzestrzenia niezmienniczą do której należy wektor v jest
podprzestrzeń generowana przez jego orbitę.
21.10. Wektor v ∈ V nazywamy wektorem cyklicznym endomorfizmu ϕ ∈ End V gdy
lin{v, ϕ(v), ϕ
2
(v), . . . , ϕ
n
(v), . . .} = V .
(a) Udowodnić, że jeśli v jest wektorem cyklicznym endomorfizmu ϕ i dim V = n, to
(v, ϕ(v), ϕ
2
(v), . . . , ϕ
n−1
(v)) jest bazą V . Taką bazę nazywamy bazą cykliczną.
(b) Wyznaczyć pierwszych n − 1 kolumn macierzy endomorfizmu ϕ w bazie cyklicznej.
(c) Znając macierz endomorfizmu ϕ w bazie cyklicznej obliczyć jego wielomian charakterysty-
czny.
68
MAREK SZYJEWSKI
(d) Znając wielomian charakterystyczny endomorfizmu ϕ obliczyć jego macierz w bazie cyk-
licznej.
(e) Znaleźć wektor cykliczny endomorfizmu z zadania
21.11. (a) Obliczyć wielomian charakterystyczny i wielomian minimalny klatki Jordana
A =
a
1
0
· · ·
0
0
0
a
1
· · ·
0
0
0
0
a
· · ·
0
0
..
.
..
.
..
.
. .
.
..
.
..
.
0
0
0
· · ·
a
1
0
0
0
· · ·
0
a
stopnia n.
(b) Obliczyć wielomian charakterystyczny i wielomian minimalny macierzy klatkowo-diagonalnej
A =
A
1
0
· · ·
0
0
A
2
· · ·
0
..
.
..
.
. .
.
..
.
0
0
· · ·
A
k
w której A
1
, A
2
, ..., A
k
są klatkami Jordana stopni n
1
, n
2
, ..., n
k
odpowiednio, z jednym wspólnym skalarem a na przekątnej.
21.12. Niech f (X) będzie wielomianem o współczynnikach rzeczywistych, a A =
a
1
0
· · ·
0
0
0
a
1
· · ·
0
0
0
0
a
· · ·
0
0
..
.
..
.
..
.
. .
.
..
.
..
.
0
0
0
· · ·
a
1
0
0
0
· · ·
0
a
- klatką Jordana stopnia n dla pewnej liczby rzeczywistej a. Wykazać, że
f (A) =
f (a)
1
1!
f
0
(a)
1
2!
f
00
(a)
· · ·
1
(n−2)!
f
(n−2)
(a)
1
(n−1)!
f
(n−1)
(a)
0
f (a}
1
1!
f
0
(a)
· · ·
1
(n−3)!
f
(n−3)
(a)
1
(n−2)!
f
(n−2)
(a)
0
0
f (a)
· · ·
1
(n−4)!
f
(n−4)
(a)
1
(n−3)!
f
(n−3)
(a)
..
.
..
.
..
.
. .
.
..
.
..
.
0
0
0
· · ·
f (a)
1
1!
f
0
(a)
0
0
0
· · ·
0
f (a)
21.13. Sprawdzić, że wielomianem minimalnym macierzy
a
b
c
d
−b
a
−d
c
−c
d
a
−b
−d
−c
b
a
jest X
2
− 2aX + (a
2
+
b
2
+ c
2
+ d
2
), a wielomianem charakterystycznym jest (X
2
− 2aX + (a
2
+ b
2
+ c
2
+ d
2
))
2
.
20
Camille Marie Ennemond Jordan (5 I 1838 - 21 I 1922) - matematyk francuski, wydawca Journal de mathé-
matiques oures et appliquées, twierdzenie Jordana-Höldera, postać kanoniczna Jordana macierzy, krzywa Jordana i
twierdzenie Jordana o rozcinaniu płaszczyzny. Autor pierwszego w historii systematycznego wykładu teorii Galois
.

ALGEBRA LINIOWA I GEOMETRIA 1
69
§ 22. Zadania różne: Macierze wielomianowe i diagonalna postać kanoniczna
W tym zestawie stale R = K[X].
22.1. Sprawdzić, że relacja równoważności macierzy w zbiorze R
n
m
jest zwrotna, symetryczna i przechodnia.
22.2. Największym wspólnym dzielnikiem wielomianów f
1
(X), f
2
(X), . . . , f
n
(X) nazywamy
- wielomian unormowany g(X) taki, że
g(X)|f
1
(X), g(X)|f
2
(X), . . . , g(X)|f
n
(X)
(tzn. g(X) jest ich wspólnym dzielnikiem) i
ilekroć h(X)|f
1
(X), h(X)|f 2(X), ..., h(X)|f n(X), to h(X)|g(X)
- jeśli choć jeden z wielomianów f
i
(X) jest niezerowy;
- wielomian zerowy 0 - jeśli f
1
(X) = f
2
(X) = · · · = f
n
(X) = 0.
Dla macierzy A ∈ R
n
m
symbolem D
k
A(X) oznaczamy największy wspólny dzielnik wszystkich
minorów stopnia k macierzy A (k = 1, 2, . . . , min(n, m)). Udowodnić, że jeśli D
k
A(X) 6= 0, to
D
k
A(X)|D
k+1
A(X).
22.3. (a) Niech n > k będą dwoma liczbami naturalnymi i A ∈ R
k
n
, B ∈ R
n
k
(tzn. A ma k wierszy i n
kolumn, a B ma n wierszy i k kolumn). Wykazać, że wyznacznik det(AB) jest sumą iloczynów
wszystkich minorów stopnia k macierzy A i B.
(b) Dla macierzy A, B ∈ R
n
n
wykazać, że
D
k
A(X)|D
k
(AB)(X)
D
k
A(X)|D
k
(BA)(X).
(c) Dla równoważnych macierzy A, B ∈ R
n
n
wykazać, że D
k
A(X) = D
k
B(X).
22.4. Mówimy, że macierz S ∈ R
n
n
jest diagonalną postacią kanoniczną (albo: postacią kanoniczną
Smitha
) gdy jest ona macierzą diagonalną:
S =
f
1
(X)
0
· · ·
0
0
f
2
(X)
· · ·
0
..
.
..
.
. .
.
..
.
0
0
· · ·
f
n
(X)
∈ R
n
n
gdzie każdy niezerowy sporód wielomianów f
1
(X), f
2
(X), . . . , f
n
(X) jest wielomianem unormowa-
nym, i
f
1
(X)|f
2
(X), f
2
(X)|f
3
(X), . . . , f
r−1
(X)|f
r
(X), f
r+1
(X) = · · · = f
n
(X) = 0.
Wiedząc, że każda macierz A ∈ R
n
n
jest równoważna z macierzą diagonalnej postaci kanonicznej,
udowodnić, że dwie macierze A, B ∈ R
n
n
są równoważne wtedy i tylko wtedy, gdy dla każdego
21
Henry J. S. Smith (1826-1883) - matematyk angielski. W 1861 r. udowodnił , że każda macierz nad pierś-
cieniem Z liczb całkowitych jest równoważna z dokładnie jedną macierzą analogicznej postaci. Dla macierzy nad
pierścieniem wielomianów R = K[X] analogiczny fakt udowodnił Ferdynand G. Frobenius (1849-1917) w 1878 r.

70
MAREK SZYJEWSKI
k ∈ {1, 2, ..., n} największe wspólne dzielniki D
k
A(X) i D
k
B(X) wszystkich minorów stopnia k
macierzy A i B odpowiednio są równe:
A≡B ⇔
∀
k∈{1,2,...n}
[D
k
A(X) = D
k
B(X)].
22.5. Jeśli A ∈ R
n
n
i A jest równoważna z macierzą kanonicznej postaci diagonalnej
f
1
(X)
0
· · ·
0
0
f
2
(X)
· · ·
0
..
.
..
.
. .
.
..
.
0
0
· · ·
f
n
(X)
, to wielomiany f
1
(X), f
2
(X), . . . , f
n
(X) nazywamy czynnikami
niezmienniczymi macierzy A. Udowodnić następujące związki między czynnikami niezmienniczymi
macierzy A i największymi wspólnymi dzielnikami jej minorów:
D
1
A(X) = f
1
(X), D
2
A(X) = f
1
(X) · f
2
(X), D
3
A(X) = f
1
(X) · f
2
(X) · f
3
(X), . . . , D
n
A(X) =
f
1
(X) · f
2
(X) · · · · · f
n
(X), D
i+1
A(X) = D
i
A(X) · f
i+1
(X) dlai = 1, 2, . . . , n − 1.
22.6. Wykonując przekształcenia elementarne znaleźć równoważną macierz kanonicznej postaci diagonalnej
(sprowadzić daną macierz do kanonicznej postaci diagonalnej):
(a)
X − 2
−1
0
0
X − 2
−1
0
0
X − 2
, (b)
X(X + 1)
0
0
0
X
0
0
0
(X + 1)
2
,
(c)
1 − X
X
2
X
X
X
−X
1 + X
2
X
2
−X
2
.
22.7. Obliczając największe wspólne dzielniki minorów znaleźć kanoniczna postać diagonalną macierzy
(a)
X
1
0
0
0
X
1
0
0
0
X
1
5
4
3
X + 2
,
(b)
a + X
b
1
0
−b
a + X
0
1
0
0
a + X
b
0
0
−b
a + X
.
22.8. Wielomianem prymarnym nazywamy wielomian, który jest potęgą wielomianu nierozkładalnego.
Każdy wielomian unormowany stopnia dodatniego jest iloczynem jednoznacznie określonych unor-
mowanych wielomianów prymarnych, np. wielomian X
6
+3X
4
+3X
2
+1 ∈ R[X] jest wielomianem
prymarnym:
X
6
+ 3X
4
+ 3X
2
+ 1 = (X
2
+ 1)
3
;
ten sam wielomian X
6
+ 3X
4
+ 3X
2
+ 1 ∈ C[X] jest iloczynem dwóch czynników prymarnych:
X
6
+ 3X
4
+ 3X
2
+ 1 = (X
2
+ 1)
3
= (X + i)
3
(X − i)
3
.
Dzielnikami elementarnymi macierzy A ∈ R
n
n
nazywamy czynniki prymarne wszystkich jej czyn-
ników niezmienniczych dodatnich stopni. Układem dzielników elementarnych macierzy A nazy-
wamy ciąg złożony z wszystkich czynników prymarnych wszystkich jej niezerowych czynników
niezmienniczych.
(a) Wiedząc, że macierz A ∈ R
6
6
ma cztery niezerowe czynniki niezmiennicze i jej układem dziel-
ników elementarnych jest X, X
2
, X
2
, X + 1, (X + 1)
3
, X − 1, X − 1, znaleźć kanoniczna postać
diagonalną macierzy A.
(b) Wiedząc, że macierz B ∈ R
7
7
ma pięć niezerowych czynników niezmienniczych i jej układem

ALGEBRA LINIOWA I GEOMETRIA 1
71
dzielników elementarnych jest X, X
2
, X
2
, X + 1, (X + 1)
3
, X − 1, X − 1, znaleźć kanoniczna postać
diagonalną macierzy B.
(c) Wykazać, że układ dzielników elementarnych macierzy klatkowo diagonalnej
"
A
0
0
B
#
pow-
staje przez dopisanie układu dzielników elementarnych macierzy B do układu dzielników elemen-
tarnych macierzy A.
22.9. Znaleźć układ dzielników elementarnych macierzy:
(a)
X
1
0
0
0
X
1
0
0
0
X
1
0
0
0
X
,
(b)
0
0
1
X + 2
0
1
X + 2
0
1
X + 2
0
0
X + 2
0
0
0
,
(c)
0
0
0
X
2
0
0
X(X − 1)
0
0
(X − 1)
2
0
0
X(X − 1)
0
0
0
.
22.10. Obliczyć czynniki niezmiennicze macierzy:
(a)
X(X + 1)
0
0
0
0
X
2
0
0
0
0
(X + 1)
2
0
0
0
0
X(X − 1)
,
(b)
X
1
2
3
0
X
1
2
0
0
X
1
0
0
0
X
,
(c)
X
1
0
0
0
X
1
0
0
1
X
0
0
0
1
X
.
22.11. Znaleźć dzielniki elementarne macierzy
X
2
+ 2
X
2
+ 1
X
2
+ 1
3
X
2
+ 1
3
X
2
+ 1
X
2
+ 1
X
2
+ 1
nad ciałem
(a) K = Q,
(b) K = R,
(c) K = C.
22.12. Obliczyć czynniki niezmiennicze i układ dzielników elementarnych macierzy charakterystycznej
A − XI klatki Jordana A =
a
1
0
· · ·
0
0
0
a
1
· · ·
0
0
0
0
a
· · ·
0
0
..
.
..
.
..
.
. .
.
..
.
..
.
0
0
0
· · ·
a
1
0
0
0
· · ·
0
a
.
§ 23. Zadania różne: kwadraty magiczne
Od najdawniejszych czasów zaciekawienie budziły kwadratowe tabliczki n × n z liczbami nat-
uralnymi od 1 do n
2
wpisanymi tak, by suma liczb w każdym wierszu i w każdej kolumnie była
taka sama.(ile wynosi ta suma ?) :
72
MAREK SZYJEWSKI
2
9
4
7
5
3
6
1
8
,
16
3
2
13
5
10
11
8
9
6
7
12
4
15
14
1
,
1
63
62
4
5
59
58
8
56
10
11
53
52
14
15
49
48
18
19
45
44
22
23
41
25
39
38
28
29
35
34
32
33
31
30
36
37
27
26
40
24
42
43
21
20
46
47
17
16
50
51
13
12
54
55
9
57
7
6
60
61
3
2
64
.
Wiara w czarodziejskie właściwości takich tabliczek znalazła odbicie w ich nazwie: nazywamy
je kwadratami magicznymi, a wspólną wartość sumy wyrazów każdego wiersza i każdej kolumny
- sumą magiczną danego kwadratu magicznego. Więcej wiadomości na ten temat można znaleźć
w książce ”Lilavati ” Szczepana Jeleńskiego. Kwadraty magiczne z rzeczywistymi elementami i
sumą magiczną 1 noszą nazwę macierzy podwójnie stochastycznych i występują w rachunku praw-
dopodobieństwa, w teorii procesów Markowa
Kwadratem magicznym n × n nad ciałem F nazywamy macierz kwadratową stopnia n nad
ciałem F taką, że suma wyrazów w każdym wierszu i w każdej kolumnie jest taka sama. Wspólną
wartoć sumy wyrazów każdego wiersza i każdej kolumny kwadratu magicznego A nazywamy sumą
magiczną A i oznaczamy s(A). Zbiór wszystkich kwadratów magicznych n × n nad ciałem F
oznaczamy symbolem M ag(n, F ).
23.1. Niech f : {1, 2, . . . , .n} × {1, 2, . . . , .n} → {1, 2, . . . , n
2
} będzie taką funkcją wzajemnie jednoznaczną,
że
f (1, 1)
f (1, 2)
· · ·
f (1, n)
f (2, 1)
f (2, 2)
· · ·
f (2, n)
..
.
..
.
. .
.
..
.
f (n, 1)
f (n, 2)
· · ·
f (n, n)
jest kwadratem magicznym, a {a
k
: k ∈ {1, 2, . . . , n
2
}}niech będzie ciągiem arytmetycznym.
Udowodnić, że macierz
a
f (1,1)
a
f (1,2)
· · ·
a
f (1,n)
a
f (2,1)
a
f (2,2)
· · ·
a
f (2,n)
..
.
..
.
. .
.
..
.
a
f (n,1)
a
f (n,2)
· · ·
a
f (n,n)
jest kwadratem magicznym i obliczyć sumę magiczną tego kwadratu magicznego.
23.2. (a) Sprawdzić, że macierz zerowa i macierz jednostkowa są kwadratami magicznymi.
(b) Sprawdzić, że macierz A jest kwadratem magicznym wtedy i tylko wtedy, gdy macierz A
|
jest kwadratem magicznym.
(c) Macierz kwadratową stopnia n, która w każdym wierszu ma dokładnie jedną jedynkę
i poza nią same zera, oraz w każdej kolumnie ma dokładnie jedną jedynkę i poza nią same zera
nazywamy macierzą permutacji. Napisać obie macierze permutacji stopnia 2, wszystkie 6 macierzy
22
Andriej A. Markow (1856-1922) - matematyk rosyjski znany głównie z osiągnięć w dziedzinie rachunku praw-
dopodobieństwa - zapoczątkował teorię procesów stochastycznych.
ALGEBRA LINIOWA I GEOMETRIA 1
73
permutacji stopnia 3. Sprawdzić, że jest n! macierzy permutacji stopnia n. Wykazać, że każda
macierz permutacji jest kwadratem magicznym.
23.3. Niech V będzie przestrzenią wektorową, (v
1
, . . . , v
n
) - jej bazą, a σ : {1, 2, . . . , n} → {1, 2, . . . , n}
- permutacją (tzn.odwzorowaniem różnowartościowym i na).
Endomorfizm ϕ
σ
przestrzeni V
określamy na bazie następująco:
ϕ
σ
(v
i
) = v
σ(i)
dla i = 1, . . . , n.
(a) sprawdzić, że ϕ
σ
(
n
X
i=1
x
i
v
i
) =
n
X
i=1
x
σ
−1
(i)
v
i
;
(b) sprawdzić, że macierz ϕ
σ
w bazie (v
1
, . . . , v
n
) jest macierzą permutacji (a więc kwadratem
magicznym).
23.4. Sprawdzić, że zbiór M ag(n, F ) jest podprzestrzenią przestrzeni F
n
n
.
23.5. Sprawdzić, że suma magiczna s : M ag(n, F ) → F jest funkcjonałem liniowym.
Oznaczenie:
M ag
0
(n, F ) = ker s.
23.6. (a) Wyznaczyć bazę przestrzeni M ag(2, R);
(b) Wyznaczyć wszystkie kwadraty magiczne stopnia 3 z sumą magiczną 5;
(c) Znaleźć bazy przestrzeni M ag
0
(3, Q) i M ag(3, Q).
23.7. (a) Zbudować izomorfizm F
n
n
→ M ag
0
(n + 1, F ) (Wskazówka: obrazem A ma być
"
A
?
?
?
#
).
(b) Obliczyć wymiar przestrzeni M ag
0
(n, F ) i M ag(n, F ).
(c) Znaleźć bazy przestrzeni M ag
0
(n, F ) i M ag(n, F ).
23.8. Udowodnić twierdzenie Birkhoffa: przestrzeń M ag(n, F ) jest generowana przez macierze permutacji.
23.9. Dla macierzy A ∈ F
n
n
i skalara a ∈ F oznaczmy V (a, A) = {α ∈ F
n
: Aα = aα} zbiór wektorów
własnych endomorfizmu α 7→ Aα należących do wartości własnej a. Udowodnić równoważność:
(A ∈ M ag(n, F ) ∧ s(A) = a) ⇔∈
1
1
..
.
1
∈ V (a, A) ∩ V (a, A
|
).
23.10. Wykazać, że iloczyn kwadratów magicznych jest kwadratem magicznym i wyrazić s(AB) przez
s(A) i s(B). Sprawdzić, że M ag(n, F ) jest podalgebrą algebry F
n
n
, a s : M ag(n, F ) → F jest
homomorfizmem F -algebr.

74
MAREK SZYJEWSKI
§ 24. Postać kanoniczna Jordana
24.1. Niech K będzie ciałem algebraicznie domkniętym. Wykazać, że postać kanoniczna Jordana macierzy
A ∈ K
n
n
ma po jednej klatce Jordana
a
1
0
· · ·
0
0
0
a
1
· · ·
0
0
0
0
a
· · ·
0
0
..
.
..
.
..
.
. .
.
..
.
..
.
0
0
0
· · ·
a
1
0
0
0
· · ·
0
a
stopnia k dla wartości własnej a
dla każdego dzielnika elementarnego (X − a)
k
macierzy charakterystycznej A − XI.
24.2. Znaleźć postać kanoniczną Jordana macierzy
(a)
3
1
−3
−7
−2
9
−2
−1
4
,
(b)
6
−6
−3
1
1
−1
1
−2
2
,
(c)
2
−1
0
1
0
3
−1
0
0
1
1
0
0
−1
0
3
nad ciałem liczb zespolonych C.
24.3. Podprzestrzenią pierwiastkową dla wartości własnej a endomorfizmu ϕ ∈ End(V ) nazywamy zbiór
{v ∈ V : ∃
n∈N
[(ϕ − a · id
V
)
n
(v) = θ]}.
(a) Wykazać, że każda podprzestrzeń pierwiastkowa jest podprzestrzenią niezmienniczą endomor-
fizmu ϕ.
(b) Wykazać, że różne podprzestrzenie pierwiastkowe endomorfizmu ϕ tworzą sumę prostą.
(c) Niech macierz ϕ względem pewnej bazy przestrzeni V będzie klatką Jordana. Sprawdzić, że
cała przestrzeń V jest jedyną podprzestrzenią pierwiastkową endomorfizmu ϕ.
(d) Wykazać, że wymiar podprzestrzeni pierwiastkowej dla wartości własnej a endomorfizmu ϕ
zespolonej przestrzeni V jest równy krotności a jako pierwiastka wielomianu charakterystycznego
endomorfizmu ϕ.
(e) Wykazać, że zespolona przestrzeń V jest sumą prostą podprzestrzeni pierwiastkowych endo-
morfizmu ϕ.
(f ) Wykazać, że wymiar podprzestrzeni V (a, ϕ) = {v ∈ V : ϕ(v) = av} dla wartości własnej a
endomorfizmu ϕ zespolonej przestrzeni V jest równy liczbie klatek Jordana dla wartości własnej
a w postaci kanonicznej Jordana macierzy tego endomorfizmu.
(g) Niech V
1
, V
2
, . . . , V
k
będą wszystkimi podprzestrzeniami pierwiastkowymi endomorfizmu ϕ
zespolonej przestrzeni wektorowej V . Wykazać, że każda podprzestrzeń niezmiennicza U endo-
morfizmu ϕ jest sumą prostą przekrojów U ∩ V
1
, U ∩ V
2
, ..., U ∩ V
k
.
24.4. Wykazać, że endomorfizm ϕ zespolonej przestrzeni skończonego wymiaru jest diagonalizowalny wt-
edy i tylko wtedy, gdy pierwiastki jego wielomianu minimalnego są parami różne.
24.5. Znaleźć macierz w postaci kanonicznej Jordana podobną do macierzy A (sprowadzić A do postaci
kanonicznej Jordana) jeśli
(a) A =
6
2
−2
−2
2
2
2
2
2
,
(b) A =
6
2
2
−2
2
0
0
0
2
.
ALGEBRA LINIOWA I GEOMETRIA 1
75
24.6. Niech ϕ będzie endomorfizmem przestrzeni V , a a - wartością własną endomorfizmu ϕ.
Niech
(v
1
, v
2
, . . . , v
s
) będzie bazą podprzestrzeni V (a, ϕ) = {v ∈ V : ϕ(v) = av}. Powtarzamy następu-
jący proces, którego wynikiem ma być ciąg liczb (r
1
, r
2
, ..., r
s
) i ciąg wektorów (w
1
, w
2
, ..., w
m
),
gdzie m = r
1
+r
2
+· · ·+r
s
. W opisie procesu i jest numerem kroku i wyrazu ciągu (w
1
, w
2
, . . . , w
m
),
a t jest numerem ostatnio użytego wektora spośród v
1
, v
2
, . . . , v
s
i numerem wyrazu ciagu
(r
1
, r
2
, . . . , r
s
). Zaczynamy od t = 1 i i = 1:
1) oznaczamy w
i
= v
t
;
2) dla wektora w
i
tworzymy układ równań ϕ(x) = ax + w
i
;
3) jeśli ten układ równań ma rozwiązanie x ∈ V , to przyjmujemy w
i+1
= x, zwiększamy i o 1 i
wracamy do punktu 2);
4) jeśli układ równań z p. 2) nie ma rozwiązania, to oznaczamy r
t
= i − (r
1
+ · · · + r
t−1
), zwięk-
szamy i oraz t o 1 i wracamy do punktu 1).
(a) Wykonać opisany proces dla endomorfizmu ϕ, który w pewnej bazie ma macierz z punktu
(a) zadania
i dla endomorfizmu ψ, który w pewnej bazie ma macierz z punktu (b) zadania
(b) Sprawdzić, że każdy wektor w
i
należy do przestrzeni pierwiastkowej endomorfizmu ϕ dla
wartości własnej a.
(c) Jeśli układ (w
1
, w
2
, ..., w
m
) można uzupełnić do bazy (w
1
, w
2
, . . . , w
m
, w
m+1
, . . . , w
n
) przes-
trzeni V , to w tej bazie macierz ϕ ma postać
A
1
0
· · ·
0
0
A
2
· · ·
0
..
.
..
.
. .
.
..
.
0
0
· · ·
A
s
∗
0
∗
, gdzie A
j
jest klatką
Jordana stopnia r
j
dla wartości własnej a.
(d) Sprawdzić, że wektory w
1
, w
2
, . . . , w
m
uzyskane w procesie opisanym w zadaniu są liniowo
niezależne.
(e) Niech wektor u należy do przestrzeni pierwiastkowej endomorfizmu ϕ dla wartości własnej
a, h jest liczbą naturalną taką, że (ϕ − a · id
V
)
h
(u) = θ ale (ϕ − a · id
V
)
h−1
(u) 6= θ. Niech
w
i
= (ϕ − a · id
V
)
h−i
(u) dla i = 1, 2, . . . , h. Sprawdzić, że w
1
= (ϕ − a · id
V
)
h−1
(u) jest wektorem
własnym ϕ należącym do wartości własnej a, oraz ϕ(w
i+1
) = aw
i+1
+ w
i
.
(f ) Wykazać, że jeśli macierz endomorfizmu ϕ w pewnej bazie ma postać kanoniczną Jordana, to
ciąg (w
1
, w
2
, ..., w
m
) jest bazą przestrzeni pierwiastkowej endomorfizmu ϕ dla wartości własnej a.
24.7. Znaleźć wszystkie zespolone macierze stopnia 6 w kanonicznej postaci Jordana, które mają wielomian
minimalny (X
2
+ 1)(X − 2)
2
.
24.8. Znaleźć wszystkie zespolone macierze stopnia 5 w kanonicznej postaci Jordana, które mają wielomian
minimalny(X
2
+ i)(X − 1)
2
.
§ 25. Zadania różne: Rozkład Jordana
25.1. Endomorfizm ϕ przestrzeni wektorowej V nad ciałem F nazywamy nilpotentnym gdy istnieje taka
liczba naturalna m, że ϕ
m
= 0; endomorfizm ϕ nazywamy półprostym, gdy wszystkie pierwiastki
jego wielomianu minimalnego w algebraicznym domknięciu ciała F są parami różne.

76
MAREK SZYJEWSKI
(a) Wykazać, że endomorfizm ϕ jest nilpotentny wtedy i tylko wtedy, gdy jego wielomianem
charakterystycznym jest X
n
:
ϕ
n
= 0 ⇔ det(ϕ − X · Id
V
) = X
n
;
gdzie n = dim V .
(b) Niech A będzie macierzą ϕ w pewnej bazie przestrzeni V . Endomorfizm ϕ jest półprosty
wtedy i tylko wtedy, gdy endomorfizm przestrzeni F
n
, n = dim V , mający w bazie kanonicznej
macierz A, jest diagonalizowalny.
25.2. Niech V = U + W , gdzie U i W są podprzestrzeniami niezmienniczymi endomorfizmu ϕ.
(a) Jeśli ϕ jest półprosty, to ϕ|
U
jest półprosty;
(b) Jeśli ϕ jest nilpotentny, to jϕ|
U
jest nilpotentny;
(c) Jeśli ϕ|
U
jest półprosty i ϕ|
W
jest półprosty, to ϕ jest półprosty;
(d) Jeśli ϕ|
U
jest nilpotentny i ϕ|
W
jest nilpotentny, to ϕ jest nilpotentny.
25.3. (Addytywny rozkład Jordana)
(1) Dla każdego endomorfizmu ϕ przestrzeni wektorowej V istnieją jednoznacznie określone
endomorfimy ϕ
s
i ϕ
n
takie, że:
(a) ϕ
s
jest półprosty i ϕ
n
jest nilpotentny,
(b) ϕ = ϕ
s
+ ϕ
n
,
(c) ϕ ◦ ϕ
s
= ϕ
s
◦ ϕ i ϕ ◦ ϕ
n
= ϕ
n
◦ ϕ.
(2) Istnieją wielomiany p(X), q(X) ∈ F [X] takie, że p(0) = 0 i q(0) = 0 i ϕ
s
= p(ϕ) i
ϕ
n
= q(ϕ).
(3) Jeśli endomorfizm ψ przestrzeni V jest przemienny z ϕ, to endomorfizm ψ jest przemienny
z ϕ
s
i ϕ
n
.
(4) Jeśli U, W są podprzestrzeniami przestrzeni V , U ⊂ W i ϕ(W ) ⊂ U to ϕ
s
(W ) ⊂ U i
ϕ
n
(W ) ⊂ U .
(5) Jeśli endomorfizmy ϕ i ψ są przemienne, ϕ ◦ ψ = ψ ◦ ϕ, to (ϕ + ψ)
s
= ϕ
s
+ ψ
s
i (ϕ + ψ)
n
=
ϕ
n
+ ψ
n
.
25.4. Znaleźć addytywny rozkład Jordana i wielomiany p i q (zadanie 3. (b) dla macierzy:
25.5. Endomorfizm ϕ przestrzeni wektorowej V nad ciałem F nazywamy unipotentnym gdy ϕ
s
= Id
V
.
(1) Wykazać, że endomorfizm ϕ jest unipotentny wtedy i tylko wtedy, gdy jego wielomianem
charakterystycznym jest (X − 1)
n
, n = dim V .
§ 26. Funkcjonały dwuliniowe
26.1. Sprawdzić, czy następujące odwzorowania ξ : R
3
× R
3
→ R:
(a) ξ(
x
y
z
,
x
0
y
0
z
0
) = xx
0
+ x
2
y
0
+ z
0
;
(b) ξ(
x
y
z
,
x
0
y
0
z
0
) = xz
0
+ yx
0
+ 2;

ALGEBRA LINIOWA I GEOMETRIA 1
77
(c) ξ(
x
y
z
,
x
0
y
0
z
0
) = xx
0
+ 2yz
0
+ zz
0
;
(d) ξ(
x
y
z
,
x
0
y
0
z
0
) = xx
0
+ xy
0
+ z
0
;
(e) ξ(
x
y
z
,
x
0
y
0
z
0
) = 0;
(f ) ξ(
x
y
z
,
x
0
y
0
z
0
) = 1.
są funkcjonałami dwuliniowymi. Które z nich są symetryczne ?
26.2. Niech V = R[X]
n
będzie przestrzenią wektorową wielomianów stopnia ≤ n nad ciałem R liczb
rzeczywistych. Odwzorowanie b : V × V → R określone jest wzorem
b(f (X), g(X)) =
1
Z
−1
f (x)g(x)dx.
Wykazać, że b jest funkcjonałem dwuliniowym, symetrycznym, niezdegenerowanym, dodatnio
określonym. Wyznaczyć macierz b względem bazy 1, X, . . . , X
n
.
26.3. W przestrzeni ortogonalnej (Q
3
, ξ) macierz funkcjonału dwuliniowego ξ w bazie
B = (
1
0
−1
,
2
0
3
,
1
1
1
)
jest równa:
(a)
2
1
−2
1
1
−1
−2
−1
2
(b)
1
1
3
1
0
−1
3
−1
2
(c)
2
1
0
1
3
2
0
1
2
Znaleźć wzór analityczny na ξ(
x
y
z
,
x
y
z
). Znaleźć bazę prostopadłą przestrzeni V .
26.4. Funkcjonał dwuliniowy ξ : Q
4
× Q
4
→ Q ma w bazie kanonicznej (ε
1
, ε
2
, ε
3
, ε
4
) macierz
1
0
0
−1
0
2
1
0
0
1
3
1
−1
0
1
4
.
Niech W = lin(ε
1
, ε
1
+ ε
2
). Znaleźć bazę prostopadłą przestrzeni W .
26.5. Przestrzeń ortogonalną (K
3
, ξ), w której ξ ma w bazie (ε
1
, ε
2
, ε
3
) macierz
2
1
−2
1
1
−1
−2
−1
2
przed-
stawić jako sumę prostą ortogonalną podprzestrzeni niezdegenerowanej i podprzestrzeni całkowicie
zdegenerowanej.

78
MAREK SZYJEWSKI
26.6. Funkcjonał dwuliniowy ξ : V × V → K ma w pewnej bazie przestrzeni V macierz
a
1
1
· · ·
1
1
1
a
1
· · ·
1
1
1
1
a
· · ·
1
1
..
.
..
.
..
.
. .
.
..
.
..
.
1
1
1
· · ·
a
1
1
1
1
· · ·
1
a
. Obliczyć wymiar V
⊥
.
§ 27. Przestrzenie dwuliniowe (ortogonalne)
27.1. Niech char(F ) 6= 2. Sprawdzić, że
(a) jeśli ξ jest symetryczną formą dwuliniową nad F , q(α) = ξ(α, α) i ζ(α, β) =
1
2
(q(α + β) −
q(α) − q(β)), to ζ = ξ;
(b) jeśli q jest formą kwadratową nad F , ξ(α, β) =
1
2
(q(α + β) − q(α) − q(β)), N (α) = ξ(α, α),
to N = q.
27.2. Niech w przestrzeni Z
2
5
forma kwadratowa wyraża się wzorem
q
"
x
y
#!
= x
2
+ y
2
.
(a) Wyznaczyć uzupełnienie ortogonalne
"
2
1
#
⊥
wektora
"
2
1
#
;
(b) Wyznaczyć dopełnienie ortogonalne prostej lin
"
2
1
#!
.
27.3. Niech w przestrzeni Z
2
2
forma dwuliniowa ξ będzie określona wzorem
ξ
"
a
b
#
,
"
c
d
#!
=
a
c
b
d
.
Wykazać, że (Z
2
2
, ξ) jest niezdegenerowaną przestrzenią ortogonalną, w której każdy wektor jest
izotropowy. Wykazać, że ta przestrzeń nie ma bazy prostopadłej.
27.4. Niech w przestrzeni R
2
forma kwadratowa wyraża się wzorem:
(i) q
"
x
y
#!
= x
2
+ 2xy + y
2
(ii) q
"
x
y
#!
= x
2
+ y
2
.
(a) Wyznaczyć uzupełnienie ortogonalne wektora
"
1
−1
#
;
(b) wyznaczyć wszystkie dopełnienienia ortogonalne prostej lin
"
1
−1
#!
.
27.5. Niech (V, ξ) będzie przestrzenią ortogonalną, zaś qξ - formą kwadratową tej przestrzeni. Wykazać,
że
(a) ξ(α, β) = 0 wtedy i tylko wtedy, gdy qξ(α + β) = qξ(α) + qξ(β);
(b) qξ(α + β) + qξ(α − β) = 2(qξ(α) + qξ(β)) dla każdych α, β ∈ V ;
(c) qξ(α) = qξ(β) wtedy i tylko wtedy, gdy ξ(α + β, α − β) = 0;

ALGEBRA LINIOWA I GEOMETRIA 1
79
27.6.
(a) Udowodnić, że dla dowolnej formy dwuliniowej ξ i dowolnych wektorów α, β zachodzi
tożsamość Cauchy’ego:
q(α)(q(α)q(β) − ξ(α, β)ξ(β, α)) = q(q(α)β − ξ(α, β)α);
(b) wykazać, że dla dowolnych dwóch wektorów α i β z dodatnio określonej przestrzeni ortogo-
nalnej (V, ξ) zachodzi nierówność Cauchy’ego:
ξ(α, β)
2
≤ q(α)q(β).
27.7. Znaleźć bazę prostopadłą przestrzeni (Q
3
, ξ) gdy q
x
y
z
= yz + xz + xy.
27.8. Niech (V, ξ) będzie niezdegenerowaną przestrzenią ortogonalną nad ciałem F , a v
1
, . . . , v
n
- jej bazą
prostopadłą unormowaną. Niech
W = {x
1
v
1
+ · · · + x
n
v
n
∈ V : x
1
+ · · · + x
n
= 0}.
Wykazać, że następujące warunki są równoważne:
(a)
char(F ) dzieli n;
(b) W
⊥
jest zdegenerowana;
(c) W
⊥
⊂ W ;
(d) W jest zdegenerowana.
27.9. Macierz funkcjonału dwuliniowego ξ : R
3
× R
3
→R w bazie (ε
1
+ ε
2
+ ε
3
, ε
1
+ ε
3
, ε
3
) jest równa
−1
0
1
0
1
1
1
1
1
. Znaleźć uzupełnienie ortogonalne:
(a) wektora
1
2
0
,
(b) podprzestrzeni lin(
1
1
1
),
(c) podprzestrzeni Sol(X − Z = 0).
27.10. Niech ξ będzie zwykłym iloczynem skalarnym w przestrzeni F
n
, a A - macierzą o m wierszach i n
kolumnach. Oznaczmy W podprzestrzeń F
n
generowaną przez transponowane wiersze A, zaś A·
- przekształcenie liniowe v 7→ A · v. Wykazać, że
(a) W
⊥
= Ker(A·);
(b) (Ker(A·))
⊥
= W ;
(c) dimW + dim(Ker(A·)) = n.
Jaką własność musi mieć ciało F , żeby dla wszystkich m, n zachodziła równość F
n
= W ⊕Ker(A·)?

80
MAREK SZYJEWSKI
27.11. Obliczyć (w zależności od parametru a wymiar radykału przestrzeni ortogonalnej w której forma
dwuliniowa ma względem pewnej bazy macierz
a
1
1
· · ·
1
1
a
1
· · ·
1
1
1
a
· · ·
1
..
.
..
.
..
.
. .
.
..
.
1
1
1
· · ·
a
.
27.12. W przestrzeni F
n
n
macierzy kwadratowych stopnia n nad ciałem F określamy formę kwadratową
wzorem q(A) = tr(A
2
) − (tr(A))
2
. Wykazać, że F
n
n
jest sumą prostą ortogonalną swoich pod-
przestrzeni A
n
(F ) macierzy antysymetrycznych i S
n
(F ) macierzy symetrycznych.
27.13. W przestrzeni F
2
2
macierzy kwadratowych stopnia 2 nad ciałem F określamy formę kwadratową
wzorem q(A) = det(A). Wykazać, że F
2
2
jest sumą ortogonalną podprzestrzeni S
2
(F ) macierzy
symetrycznych i A
2
(F ) macierzy antysymetrycznych.
27.14. W przestrzeni F
n
n
macierzy kwadratowych stopnia n nad ciałem F określamy formę kwadratową
wzorem q(A) = tr(A
|
· A). Wykazać, że F
n
n
jest sumą ortogonalną swoich podprzestrzeni S
n
(F )
macierzy symetrycznych i A
n
(F ) macierzy antysymetrycznych.
27.15. Dwa układy wektorów (v
1
, v
2
, . . . , v
k
) i (w
1
, w
2
, . . . , w
k
) przestrzeni ortogonalnej (V, ξ) nazywamy
wzajemnymi wtedy i tylko wtedy, gdy
ξ(v
i
, w
j
) =
(
0 gdy i 6= j
1 gdy i = j
.
(a) wykazać, że jeśli układy wektorów (v
1
, v
2
, . . . , v
k
) i (w
1
, w
2
, . . . , w
k
) są wzajemne, to
każdy z nich jest liniowo niezależny;
(b) wykazać, że jeśli układ wektorów (v
1
, v
2
, . . . , v
k
) niezdegenerowanej przestrzeni or-
togonalnej jest liniowo niezależny, to istnieje dla niego układ wzajemny;
(c) znaleźć choć jeden układ wzajemny dla (ε
1
, ε
2
) w przestrzeni (F
2
, ξ) jeśli
c1) q(
"
x
y
#
) = x
2
+ y
2
;
c2) q(
"
x
y
#
) = 2x
2
+ xy + y
2
;
c3) q(
"
x
y
#
) = xy ;
(d) podać przykład przestrzeni ortogonalnej i liniowo niezależnego układu wektorów, dla
którego nie istnieje układ wzajemny.
(e) wykazać, że układ wzajemny z bazą jest bazą.
27.16. Niech (v
1
, v
2
, . . . , v
k
) i (w
1
, w
2
, . . . , w
k
) będą wzajemnymi bazami niezdegenerowanej przestrzeni
ortogonalnej (V, ξ). Sprawdzić, że:
(a) jeśli dwa endomorfizmy ϕ, ψ ∈ End(V ) mają własność: bazy (ϕ(v
1
), ϕ(v
2
), . . . , ϕ(v
k
))
i (ψ(w
1
), ψ(w
2
), . . . , ψ(w
k
)) są wzajemne, to det(ϕ) det(ψ) = 1;
(b) endomorfizm ϕ ∈ End(V ) taki, że bazy (ϕ(v
1
), ϕ(v
2
), . . . , ϕ(v
k
)) i (ϕ(w
1
), ϕ(w
2
), . . . , ϕ(w
k
))
są wzajemne, jest automorfizmem ortogonalnym.
27.17. Sprawdzić, że dla ustalonej macierzy A ∈ F
n
n
wzór ξ(X, Y ) = tr(X
|
AY ) określa funkcjonał dwulin-
iowy w przestrzeni F
n
n
. Kiedy ten funkcjonał jest symetryczny? niezdegenerowany?
27.18. Wykazać, że przestrzeń R
3
z funkcjonałem dwuliniowym ξ : R
3
× R
3
→ R danym którymkolwiek
ze wzorów:

ALGEBRA LINIOWA I GEOMETRIA 1
81
(a) ξ(
x
1
x
2
x
3
,
y
1
y
2
y
3
) = x
1
y
1
+ x
2
y
2
+ x
2
y
1
+ x
1
y
2
+ x
3
y
3
,
(b) ξ(
x
1
x
2
x
3
,
y
1
y
2
y
3
) = (x
1
− x
2
)(y
1
− y
2
) + (x
1
− x
3
)(y
1
− y
3
) + x
3
y
3
,
jest przestrzenią euklidesową, natomiast przestrzeń R
3
z funkcjonałem dwuliniowym ξ : R
3
×R
3
→
R danym którymkolwiek ze wzorów:
(c) ξ(
x
1
x
2
x
3
,
y
1
y
2
y
3
) = x
1
y
1
+ x
2
y
2
,
(d) ξ(
x
1
x
2
x
3
,
y
1
y
2
y
3
) = x
2
y
1
+ x
1
y
2
+ x
3
y
3
,
(e) ξ(
x
1
x
2
x
3
,
y
1
y
2
y
3
) = x
1
y
1
+ x
2
y
2
+ x
3
y
3
+ x
2
y
1
+ x
1
y
2
+ x
3
y
1
+ x
1
y
3
.
nie jest przestrzenią euklidesową. Które z tych przestrzeni są niezdegenerowane?
27.19. W przestrzeniach ortogonalnych R
3
z funkcjonałami dwuliniowymi ξ określonymi wzorami c), d),
(e) z poprzedniego zadania wskazać niezerowe podprzestrzenie całkowicie zdegenerowane.
27.20. Niech ξ : R[X]
n
× R[X]
n
→ R będzie przekształceniem danym wzorem
ξ(f, g) =
1
Z
−1
f (t)g(t)dt.
Sprawdzić, że (R[X]
n
, ξ) jest przestrzenią euklidesową. Napisać macierz ξ w bazie
(1, X, X
2
, . . . , X
n
) dla n = 1, 2, 3, 4.
27.21. Niech I będzie dowolnym niejednopunktowym przedziałem domkniętym, a V niech będzie dowolną
skończenie wymiarową podprzestrzenią przestrzeni C(I) i niech
ξ(f, g) =
Z
I
f (t)g(t)dt.
Wykazać, że (V, ξ) jest przestrzenią euklidesową.
§ 28. Zadania różne: Wektory izotropowe i płaszczyzny hiperboliczne.
28.1. Wykazać, że
(a) α ⊥ β ⇔ q(α + β) = q(α) + q(β);
(b) suma dwóch wektorów izotropowych jest wektorem izotropowym wtedy i tylko wtedy,
gdy składniki są do siebie prostopadłe.
28.2. Niech (V, ξ) będzie dwuwymiarową niezdegenerowaną przestrzenią ortogonalną nad ciałem F w
którym 1 + 1 6= 0. Wykazać, że następujące warunki są równoważne:
(a) (V, ξ) jest przestrzenią izotropową;

82
MAREK SZYJEWSKI
(b) istnieje baza przestrzeni V , względem której macierz funkcjonału ξ jest równa [
0 1
1 a
] dla
pewnego a ∈ F ;
(c) istnieje baza przestrzeni V , względem której macierz funkcjonału ξ jest równa [
0 1
1 0
];
(d) istnieje baza przestrzeni V , względem której macierz funkcjonału ξ jest równa
1 0
0 −1
;
(e) det(x) = −c
2
dla pewnego c ∈ F
∗
.
Przestrzeń (V, ξ) spełniającą powyższe warunki nazywamy płaszczyzną hiperboliczną.
28.3. Wykazać, że każda niezdegenerowana przestrzeń ortogonalna jest izotropowa wtedy i tylko wt-
edy, gdy zawiera płaszczyznę hiperboliczną (Wskazówka: niech α będzie niezerowym wektorem
izotropowym; obliczyć dim(Ker(ξ
0
(α))); rozważyć wektor β ∈ V \Ker(ξ
0
(α))).
28.4. Znaleźć bazę prostopadłą przestrzeni (Q
3
, ξ) gdy q(
x
y
z
) = yz + xz + xy.
28.5. Dana jest przestrzeń ortogonalna (V, ξ) nad ciałem Z
5
z bazą prostopadłą unormowaną v
1
, v
2
, v
3
,
v
4
. Znaleźć choć jedną płaszczyznę hiperboliczną U zawartą w V . Sprawdzić, czy jej uzupełnienie
ortogonalne jest płaszczyzną hiperboliczną.
28.6. Wykazać, że przestrzenie ortogonalne (Z
3
3
, ξ) i (Z
3
3
, ζ) są izomorficzne, gdzie q
ξ
(
a
b
c
) = a
2
+b
2
+c
2
i q
ζ
(
a
b
c
) = a
2
− b
2
− c
2
.
28.7. Wykazać, że jeśli q(α) = q(β), to α+β ⊥ α−β. Sprawdzić, że tak jest dla α =
"
5
5
#
i β =
"
1
7
#
na
płaszczyźnie R
2
ze zwykłym iloczynem skalarnym i narysować punkty P =
0
0
!
, Q =
5
5
!
,
R =
1
7
!
, S =
5
5
!
+
"
1
7
#
oraz odcinki P Q, P R, RS, QS i odcinki P S, RQ. Obliczyć
wektory
−→
P S i
−
−
→
RQ.
28.8. Wykazać, że jeśli wektory α i β są izotropowe, to dla każdych skalarów a, b wektory aα + bβ i aα − bβ
są prostopadłe.
28.9. Wykazać, że przestrzeń ortogonalna (V, ξ) jest anizotropowa wtedy i tylko wtedy, gdy nie ma pod-
przestrzeni zdegenerowanych.
28.10. Przestrzeń ortogonalną (V, ξ) nazywamy hiperboliczną wtedy i tylko wtedy, gdy jest ona sumą
prostą ortogonalną płaszczyzn hiperbolicznych. Udowodnić, że nad ciałem o charakterystyce różnej
od 2 następujące warunki są równoważne:
(a) (V, ξ) jest hiperboliczna ;
(b) (V, ξ) jest niezdegenerowana i istnieje podprzestrzeń U przestrzeni V o własności
U = U
⊥
;
(c) (V, ξ) jest niezdegenerowana i istnieją podprzestrzenie U, W przestrzeni V takie, że
V = U ⊕ W , ξ|
U ×U
jest zerowa i ξ|
W ×W
jest zerowa.
ALGEBRA LINIOWA I GEOMETRIA 1
83
28.11. Wykazać, że izotropowa przestrzeń ortogonalna ma bazę złożoną z wektorów izotropowych (wskazówka:
założyć niewprost, że zbiór wektorów izotropowych zawiera się w hiperpłaszczynie α
⊥
).
28.12. Znaleźć rozkład Witta przestrzeni Z
4
3
ze zwykłym iloczynem skalarnym.
§ 29. Przekształcenia ortogonalne. Izomorfizmy przestrzeni ortogonalnych.
29.1. Udowodnić, że dla każdego przekształcenia ortogonalnego f : (V, ξ) → (W, ζ) zachodzi inkluzja
Ker(f ) ⊂ rad(V ).
29.2. Sprawdzić, czy przestrzenie ortogonalne (R
2
, ξ), (R
2
, ζ) w których q
ξ
(
"
x
y
#
) = x
2
−y
2
, q
ζ
(
"
x
y
#
) =
x
2
+ 2xy + y
2
są izomorficzne.
29.3. Pokazać, że macierze
"
1
0
0
1
#
i
"
1
0
0
2
#
są kongruentne nad ciałami Z
7
i R, ale nie są kongruentne
nad ciałami Z
3
i Q.
29.4. Niech A będzie symetryczną macierzą stopnia n nad ciałem F . Niech φ : F
n
→ F
n
będzie endo-
morfizmem o macierzy A w bazie kanonicznej, ζ - formą dwuliniową o macierzy A względem bazy
kanonicznej, ξ - zwykłym iloczynem skalarnym. Wykazać, że:
(a) wektory własne endomorfizmu φ należące do różnych wartości własnych są prostopadłe do
siebie względem ζ i względem ξ;
(b) jeśli baza (v
1
, . . . , v
n
) przestrzeni F
n
jest bazą prostopadłą zarówno dla ζ jak i dla ξ, to jest
to baza złożona z wektorów własnych endomorfizmu φ.
29.5. Udowodnić, że przestrzenie ortogonalne nad ciałem F , w których funkcjonały dwuliniowe mają
macierze
"
1
0
0
1
#
i
"
a
0
0
a
#
są izomorficzne wtedy i tylko wtedy, gdy a jest sumą dwóch
kwadratów elementów ciała F .
Czy macierze
"
1
0
0
1
#
i
"
3
0
0
3
#
(
"
1
0
0
1
#
i
"
7
0
0
7
#
) są kongruentne nad ciałem R? nad
ciałem Q ? (Sprawdzić, że liczby 3 oraz 7 nie są sumami dwóch kwadratów liczb wymiernych).
29.6. Twierdzenie Lagrange’a głosi, że każda dodatnia liczba wymierna jest sumą czterech kwadratów
liczb wymiernych. Wykazać, że dla każdej dodatniej liczby wymiernej r przestrzenie ortogonalne
(Q
4
, ξ) i (Q4, ζ), w których funkcjonały dwuliniowe mają względem baz kanonicznych macierze
I oraz rI, są izomorficzne. (Wskazówka: jeśli r = a
2
+ b
2
+ c
2
+ d
2
, to zbadać wektory
a
b
c
d
,
−b
a
−d
c
,
−d
−c
b
a
w przestrzeni z macierzą I).
29.7. Sprawdzić, czy przekształcenia ϕ, ψ ∈ End(R[X]
5
):
ϕ(f (X)) = f (−X);
ψ(f (X)) = X
5
· f (
1
X
)

84
MAREK SZYJEWSKI
są automorfizmami ortogonalnymi przestrzeni ortogonalnej (R[X]
5
, ξ), jeśli
(a) ξ(f, g) =
1
R
−1
f (t)g(t)dt;
(b) ξ(a
0
+ a
1
X + a
2
X
2
+ a
3
X
3
+ a
4
X
4
+ a
5
X
5
, b
0
+ b
1
X + b
2
X
2
+ b
3
X
3
+ b
4
X
4
+ b
5
X
5
) =
5
P
i=0
a
i
b
i
29.8. Czy macierze
1
2
3
2
0
−1
3
−1
3
i
1
3
0
3
1
1
0
1
5
są kongruentne
(a) nad ciałem liczb rzeczywistych?
(b) nad ciałem liczb wymiernych?
29.9. Wykazać, że dla a, b ∈ F
∗
macierze aI i bI stopnia 2 są kongruentne nad ciałem F wtedy i tylko
wtedy, gdy ab jest sumą dwóch kwadratów w F .
29.10. Wykazać, że dla a ∈ F
∗
macierze I i aI stopnia 4 są kongruentne nad ciałem F wtedy i tylko
wtedy, gdy a jest sumą czterech kwadratów w ciele F .(Wskazówka. Porównać z zadaniem
ze
str.
29.11. Wykazać, że dla a, b ∈ F
∗
macierze I i
a
0
0
0
0
a
0
0
0
0
b
0
0
0
0
b
stopnia 4 są kongruentne nad ciałem F
wtedy i tylko wtedy, gdy a jest sumą czterech kwadratów i ab jest sumą dwóch kwadratów..
29.12. Zbudować izomorfizm przestrzeni ortogonalnych (V, ξ) i (W, ζ) nad ciałem Z
3
lub udowodnić, że
nie są one izomorficzne:
(a) ξ i ζ mają względem pewnych baz macierze
1
0
0
0
−1
0
0
0
−1
i
1
0
0
0
1
0
0
0
1
odpowiednio;
(b) ξ jest zwykłym iloczynem skalarnym w V = Z
3
4, a q
ζ
(xw
1
+ yw
2
+ zw
3
+ tw
4
) = xy + zt
dla pewnej bazy (w
1
, w
2
, w
3
, w
4
) przestrzeni W .
§ 30. Rzuty prostopadłe i symetrie.
30.1. W przestrzeni ortogonalnej(R
3
, ξ) forma kwadratowa wyraża się wzorem q
ξ
(
x
y
z
) = x
2
− 2xy +
3y
2
+ z
2
.
(a) Znaleźć macierz rzutu prostopadłego na płaszczyznę lin(
1
−1
0
,
0
1
2
) w bazie (ε
1
, ε
1
+
ε
2
, ε
3
);
(b) Znaleźć macierz symetrii prostopadłej względem płaszczyzny Sol(X − Y + Z = 0) w bazie
kanonicznej.
(c) Znaleźć wzór określający symetrię prostopadłą względem prostej Sol
(
X + 2Y − Z = 0
2X + Y = 0
!
.
30.2. Obliczyć rzut prostopadły wektora v na podprzestrzeń L w przestrzeni euklidesowej R
4
ze zwykłym
iloczynem skalarnym, gdy

ALGEBRA LINIOWA I GEOMETRIA 1
85
(a) v =
4
−1
−3
4
, L = lin(
1
1
1
1
,
1
2
2
1
,
1
0
0
3
);
(b) v =
7
−4
−1
2
, L = Sol
2x
1
+ x
2
+ x
3
+ 3x
4
= 0
3x
1
+ 2x
2
+ 2x
3
+ x
4
= 0
x
1
+ 2x
2
+ 2x
3
− 4x
4
= 0
.
30.3. ξ jest zwykłym iloczynem skalarnym w przestrzeni współrzędnych F
n
. Wykazać, że:
(a) Macierz kwadratowa A stopnia n nad ciałem F jest symetryczna i idempotentna (tzn. A
2
=
A) ⇔ A jest macierzą rzutu prostopadłego na pewną podprzestrzeń względem bazy kanonicznej;
(b) Macierz kwadratowa B stopnia n nad ciałem F jest symetryczna i inwolutywna (tzn. B
2
= I)
⇔ B jest macierzą symetrii względem pewnej podprzestrzeni w bazie kanonicznej przestrzeni F
n
ze zwykłym iloczynem skalarnym.
30.4. Podać macierze względem bazy kanonicznej dwóch różnych symetrii osiowych przekształcających
lin(
"
1
−1
#
) na lin(
"
−1
7
#
) w przestrzeni R
2
ze zwykłym iloczynem skalarnym.
30.5. W przestrzeni R
3
ze zwykłym iloczynem skalarnym dane są płaszczyzny lin(
1
2
1
,
−1
0
1
) i
lin(
1
3
−2
,
1
−2
3
). Podać macierze względem bazy kanonicznej dwóch różnych symetrii
płaszczyznowych przekształcających jedną z tych płaszczyzn na drugą.
30.6. Symetria τ
α
względem hiperpłaszczyzny α
⊥
wyraża się wzorem
τ
α
(β) = β − 2
ξ(β, α)
ξ(α, α)
α
(a) Wykazać, że jeśli wektory nieizotropowe u i v są liniowo zależne lub prostopadłe, to τ
u
◦ τ
v
=
τ
v
◦ τ
u
.
(b) Podać przykład przestrzeni ortogonalnej i nieizotropowych wektorów u, v dla których τ
u
◦τ
v
6=
τ
v
◦ τ
u
.
(c) Wykazać, że jeśli u i v są wektorami nieizotropowymi i w = τ
v
(u), to τ
v
◦ τ
u
= τ
w
◦ τ
v
.
30.7. W przestrzeni R
4
ze zwykłym iloczynem skalarnym dane są wektory u =
−9
6
2
0
i v =
2
−1
0
2
.
Wyznaczyć bazę, uzupełnienie ortogonalne i równanie ogólne hiperpłaszczyzny U takiej, że syme-
tria względem U przekształca lin(u) na lin(v).
30.8. Wykazać, że nie istnieje symetria hiperpłaszczyznowa w przestrzeni R
4
ze zwykłym iloczynem
skalarnym, która przekształca lin(ε
1
, ε
2
) na lin(ε
3
, ε
4
). (Wskazówka: niech φ będzie automor-
fizmem ortogonalnym przekształcającym pierwszą z płaszczyzn na drugą.
Zbadać własności

86
MAREK SZYJEWSKI
czwórki wektorów ε
1
± φ(ε
1
), ε
2
± φ(ε
2
) przy założeniu φ
2
= Id i obliczyć wymiar przestrzeni
punktów stałych φ).
30.9. Wykazać, że
(a) jeśli ϕ jest symetrią hiperpłaszczyznową, to
1
2
(Id + ϕ) jest rzutem na hiperpłaszczyznę;
(b) jeśli ψ jest rzutem prostopadłym na hiperpłaszczyznę, to 2ψ − Id jest symetrią hiper-
płaszczyznową.
§ 31. Bazy prostopadłe.
31.1. Niech (v
1
, v
2
, . . . , v
n
) będzie bazą prostopadłą unormowaną przestrzeni ortogonalnej (V, ξ), a
(u
1
, u
2
, . . . , u
n
) - dowolnym układem wektorów.
Udowodnić, że macierz P = [ξ(v
i
, u
j
)], jest
macierzą przejścia od (v
1
, v
2
, . . . , v
n
) do (u
1
, u
2
, . . . , u
n
).
31.2. Znaleźć bazę ortogonalną przestrzeni ortogonalnej (V, ξ), jesli:
(a) V = R
3
, a macierz funkcjonału dwuliniowego ξ : R
3
×R
3
→ R w bazie (ε
1
+ ε
2
+ ε
3
, ε
1
+ ε
3
, ε
3
)
jest równa
−1
0
1
0
1
1
1
1
1
;
(b) V = R
4
, a q
ξ
(
x
y
z
t
) = 2xz + yz − xy;
(c) V = Z
3
5
, a macierz ξ w bazie kanonicznej jest równa
0
1
1
1
0
1
1
1
0
.
31.3. Znaleźć bazę prostopadłą unormowaną przestrzeni (Q
2
, ξ) w której q(
"
x
y
#
) = 2x
2
+ 2y
2
. Czy ma
bazę prostopadłą unormowaną przestrzeń (Q
2
, ξ), w której q(
"
x
y
#
) = 7x
2
+ 7y
2
? (Wskazówka:
zadanie
str.
31.4. Metoda Jacobiego znajdowania kongruentnej macierzy diagonalnej.
(a) Niech A
i
= G
ξ
(v
1
, . . . , vi) będzie macierzą Grama układu poczatkowych i wektorów sporód
wektorów v
1
, . . . , v
k
, a u
1
, . . . , u
k
będą wektorami otrzymanymi z v
1
, . . . , v
k
za pomocą ortog-
onalizacji Grama.
Wykazać, że jeśli v
1
, . . . , v
k
są liniowo niezależne i lin(v
1
, . . . , v
k
) jest ani-
zotropowa, to G
ξ
(u
1
, . . . , u
k
) jest macierzą diagonalną mającą na przekątnej skalary det(A
1
),
det(A
2
)
det(A
1
)
,
det(A
3
)
det(A
2
)
, . . . ,
det(A
k
)
det(A
k−1
)
.
(b) Niech dla macierzy symetrycznej A = [a
ij
] stopnia n macierze A
1
= [a
11
], A
2
=
"
a
11
a
12
a
21
a
22
#
,
. . ., A
n
= A mają wyznaczniki różne od 0. Udowodnić, że macierz A i macierz diagonalna, mająca
na przekątnej skalary det(A
1
),
det(A
2
)
det(A
1
)
,
det(A
3
)
det(A
2
)
, . . . ,
det(A
n
)
det(A
n−1
)
są macierzami kongruentnymi.
31.5. Metoda Lagrange’a znajdowania kongruentnej macierzy diagonalnej.

ALGEBRA LINIOWA I GEOMETRIA 1
87
Niech w niezdegenerowanej przestrzeni ortogonalnej (V, ξ) wzór na wartość formy kwadratowej
q(
x
1
x
2
..
.
x
n
) = F (x
1
, x
2
, . . . , x
n
)
w zależności od współrzędnych w bazie (v
1
, . . . , v
n
) dany będzie wielomianem
F (X
1
, X
2
, . . . , X
n
) =
n
X
i=1
n
X
j=i
a
ij
X
i
X
j
.
Tworzymy ciąg wielomianów:
krok 1.
i) jeśli a
11
6= 0, to
(1)
F (X
1
, X
2
, . . . , X
n
) = a
11
X
2
1
+
n
X
i=2
a
1i
X
1
X
i
+
n
X
i=2
n
X
j=i
a
ij
X
i
X
j
;
dodając i odejmując
1
2a
11
n
X
i=2
a
1i
X
1
X
i
!
2
i oznaczając Y
1
= X
1
+
1
2a
11
n
X
i=2
a
1i
X
i
, b
1
= a
11
przepisujemy wzór (
) w postaci
F (X
1
, X
2
, . . . , X
n
) = b
1
Y
2
1
+ F
1
(X
2
, . . . , X
n
)
gdzie F
1
(X
2
, . . . , X
n
) =
n
X
i=2
n
X
j=i
a
ij
X
i
X
j
− a
11
1
2a
11
n
X
i=2
a
1i
X
1
X
i
!
2
;
ii) jeśli a
11
= 0, to
(2)
F (X
1
, X
2
, . . . , X
n
) =
n
X
i=2
a
1i
X
1
X
i
+
n
X
i=2
n
X
j=i
a
ij
X
i
X
j
i jeśli k jest najmniejszym takim numerem, że a
1k
6= 0 (dlaczego istnieje takie k?), to
oznaczamy Z
k
=
n
X
i=k
a
1i
X
i
−X
1
, wyliczamy z tej równości X
k
=
1
a
1k
(Z
k
+X
1
−
n
X
i=k+1
a
1i
X
i
)
i wstawiamy do wielomianu F ; porządkujemy otrzymane wyrażenie doprowadzając je do
postaci
F (X
1
, X
2
, . . . , X
n
) = X
1
(Z
k
+ X
1
) + F
0
(X
2
, . . . , X
k−1
, Z
k
, X
k+1
, . . . , X
n
)
i to wyrażenie przekształcamy jak w przypadku i).
krok 2. po wykonaniu kroku 1. i uzyskaniu wyrażenia
F (X
1
, X
2
, . . . , X
n
) = b
1
Y
2
1
+ F
1
(X
2
, . . . , X
n
)
stosujemy krok 1. do wzoru F
1
(X
2
, . . . , X
n
) na wartość formy kwadratowej na wektorze z przes-
trzeni lin(v
2
, . . . , v
n
); uzyskane wyrażenie F
1
(X
2
, . . . , X
n
) = b
2
Y
2
2
+ F
2
(X
3
, . . . , X
n
) wstawiamy
do wzoru F (X
1
, X
2
, . . . , X
n
) = b
1
Y
2
1
+ F
1
(X
2
, . . . , X
n
) i uzyskujemy wzór
F (X
1
, X
2
, . . . , X
n
) = b
1
Y
2
1
+ b
2
Y
2
2
+ F
2
(X
3
, . . . , X
n
)
..
.

88
MAREK SZYJEWSKI
krok m. jeśli po wykonaniu kroków 1, 2, . . . , m − 1 mamy wzór
F (X
1
, X
2
, . . . , X
n
) = b
1
Y
2
1
+ · · · + b
m−1
Y
2
m−1
+ F
m−1
(X
m
, . . . , X
n
),
to stosujemy krok 1.
do wzoru F
m−1
(X
m
, . . . , X
n
) na wartość formy kwadratowej na pod-
przestrzeni lin(v
m
, . . . , v
n
); rezultat F
m−1
(X
m
, . . . , X
n
) = b
m
Y
2
m
+ F
m
(X
m+1
, . . . , X
n
) wstaw-
iamy do wzoru uzyskanego w kroku m − 1.
Ostatecznie po n krokach uzyskujemy wzór
F (X
1
, X
2
, . . . , X
n
) = b
1
Y
2
1
+ · · · + b
n
Y
2
n
.
(a) sprawdzić, że macierz diagonalna diag(b
1
, . . . , b
n
) jest macierzą funkcjonału ξ względem
pewnej bazy prostopadłej przestrzeni V ;
(b) sprawdzić, że funkcjonały liniowe f
1
, . . . , f
n
takie, że f
i
(
n
X
j=1
x
i
v
i
) = Y
i
(x
1
, . . . , x
n
) dla i =
1, 2, . . . , n tworzą bazę przestrzeni sprzężonej V
∗
.
Stosując metodę Jacobiego i metodę Lagrange’a znaleźć dwoma sposobami macierz funkcjonału
dwuliniowego w pewnej bazie prostopadłej i porównać objętoć obliczeń:
(a) F (x
1
, x
2
) = x
2
1
+ x
1
x
2
+ x
2
2
;
(b) F (x
1
, x
2
, x
3
) = x
1
x
2
+ x
2
x
3
+ x
1
x
3
(c) F (x
1
, x
2
, x
3
) = 99x
2
1
− 12x
1
x
2
+ 48x
1
x
3
+ 130x
2
2
− 60x
2
x
3
+ 71x
2
3
;
(d) F (x
1
, x
2
, x
3
, x
4
) = x
2
1
+ 4x
2
2
+ 8x
2
3
− x
2
4
− 4x
1
x
2
+ 6x
1
x
3
− 12x
2
x
3
+ 2x
3
x
4
;
(e) F (x
1
, x
2
, x
3
, x
4
, x
5
) = x
2
1
+ 4x
2
2
+ 8x
2
3
− x
2
4
− 4x
1
x
2
+ 6x
1
x
3
− 12x
2
x
3
+ 2x
3
x
4
+
x
2
x
5
− x
4
x
5
.
31.6. (Postać kanoniczna trójmianu kwadratowego) Niech f (X) = aX
2
+bX +c ∈ K[X] będzie trójmianem
(tzn. wielomianem, który jest sumą trzech jednomianów) kwadratowym (tzn. stopnia 2). Z
wielomianem f (X) związany jest wielomian jednorodny
g(X, Y ) = Y
2
f (
X
Y
) ∈ K[X, Y ]
nazywany ujednorodnieniem wielomianu f (X). Aby z ujednorodnienia wyznaczyć wielomian,
wystarczy podstawić Y = 1:
f (X) = g(X, 1).
Rozwiązania równania f (X) = 0 są związane z tymi rozwiązaniami równania g(X, Y ) = 0, które
mają niezerową drugą współrzędną:
jeśli y 6= 0, to g(x, y) = 0 ⇔ f (
x
y
) = 0.
(a) Sprowadzić wielomian g(X, Y ) do postaci kanonicznej.
(b) Podstawić w uzyskanym wyrażeniu Y = 1 (wynik nazywamy postacią kanoniczną trójmi-
anu kwadratowego).
(c) Wyciągnąć wnioski dotyczące rozwiązywania i rozwiązalności równania f (X) = 0 w ciele
K.
(d) Niech K = R. Wiadomo, że wykres funkcji y = x
2
jest parabolą z ramionami zwróconymi
w górę i wierzchołkiem w punkcie (0, 0). Czym będzie wykres funkcji y = f (x) dla trójmianu
f (X) = aX
2
+ bX + c? Wyznaczyć ekstremum tej funkcji bez użycia pochodnych.

ALGEBRA LINIOWA I GEOMETRIA 1
89
31.7. Zbudować macierz diagonalną kongruentną do macierzy
(a)
1
1
0
1
1
1
0
1
0
;
(b)
0
1
0
1
0
1
0
1
0
nad ciałem F .
31.8. Znaleźć przynajmniej jedną macierz nieosobliwą P ∈ GL
n
(Q) taką, że macierz P
|
AP jest diago-
nalna, jeśli
(a) A =
1
1
0
1
2
2
0
2
3
,
(b) A =
1
1
1
1
5
−1
1
−1
5
,
(c) A =
"
1
1
1
1
#
,
(d) A =
2
1
1
0
1
2
0
1
1
0
2
1
0
1
1
2
,
(e) A =
"
2
1
1
2
#
.
31.9. Niech A będzie macierzą kwadratową stopnia n o wyrazach rzeczywistych. Podać warunek konieczny
i wystarczający na to, by równanie A = X
|
X miało rozwiązanie X ∈ GL
n
(R). (Wskazówka: jakie
równoważne równanie spełnia niewiadoma Y = X
−1
? czy to równanie ma związek z izomorfizmami
przestrzeni ortogonalnych?).
31.10. Znaleźć przynajmniej jedną macierz nieosobliwą P ∈ GL
n
(R) taką, że P
|
P = A, jeśli
(a) A =
"
2
1
1
5
#
,
(b) A =
"
2
2
2
3
#
,
(c) A =
1
1
1
1
2
1
1
1
3
,
(d) A =
1
1
1
1
5
−1
1
−1
5
.
Czy istnieje rozwiązanie P ∈ GL
3
(Q)?
31.11. Znaleźć choć jedno rozwiązanie X ∈ GL
4
(R) równaniaX
|
X =
1
2
−5
−5
2
5
−12
−13
−5
−12
30
33
−5
−13
33
39
.
31.12. Sprawdzić, że w przestrzeni F
n
ze zwykłym iloczynem skalarnym
(a) dla n = 2: wektorem prostopadłym do
"
a
b
#
jest
"
−b
a
#
;
(b) dla n = 3: wektorem prostopadłym do
a
b
c
i
d
e
f
jest
b
e
c
f
−
a
d
c
f
a
d
b
e
;
(c) dla dowolnego n: wektorem prostopadłym do v
1
, v
2
, . . . , v
n−1
jest ostatnia kolumna macierzy
dołączonej do macierzy
h
v
1
v
2
· · ·
v
n−1
∗
i
.
Document Outline
- § 1. Informacje ogólne
- 1. Plan wykladu
- 2. Zbiór zadan
- § 6. Przestrzenie wektorowe
- § 7. Podprzestrzenie przestrzeni wektorowych.
- § 8. Kombinacje liniowe
- § 9. Podprzestrzenie generowane przez wektory.
- § 10. Bazy
- § 11. Wyznaczniki
- § 12. Rzedy macierzy
- § 13. Macierze
- § 14. Uklady równan
- § 15. Zadania rózne: lamiglówki
- § 16. Przeksztalcenia liniowe
- § 17. Przeksztalcenia liniowe 2
- § 18. Macierze przeksztalcen liniowych
- § 19. Przestrzenie sprzezone
- § 20. Wektory wlasne i wartosci wlasne
- § 21. Wielomian charakterystyczny i wielomian minimalny endomorfizmu
- § 22. Zadania rózne: Macierze wielomianowe i diagonalna postac kanoniczna
- § 23. Zadania rózne: kwadraty magiczne
- § 24. Postac kanoniczna Jordana
- § 25. Zadania rózne: Rozklad Jordana
- § 26. Funkcjonaly dwuliniowe
- § 27. Przestrzenie dwuliniowe (ortogonalne)
- § 28. Zadania rózne: Wektory izotropowe i plaszczyzny hiperboliczne.
- § 29. Przeksztalcenia ortogonalne. Izomorfizmy przestrzeni ortogonalnych.
- § 30. Rzuty prostopadle i symetrie.
- § 31. Bazy prostopadle.
Wyszukiwarka
Podobne podstrony:
więcej podobnych podstron