1
The Overhauser Scalar Magnetometer
{kind=link}
http://gate.dmi.dk/projects/oersted
Introduction
The purpose of the scalar magnetometer is to provide an in-flight, absolute calibration of the
vector magnetometer, independent on environmental conditions.
The measuring range of the instrument is from 16000 nT to 54000 nT with an accuracy of
better than 1 nT. Rate of measurements will be 1 sample per second. Power consumption is
limited to 3 W in CW mode and less than 0.5 W in stand-by mode. Weight of the
{kind=link}
The scalar magnetometer is provided by Centre National d`Etudes Spatiale (CNES) in
Toulouse, and developed by Laboratory for Electronics, Technology and Instrumentation
(LETI) in Grenoble.
Physical principles
The function of the scalar magnetometer is based on the principles of proton magnetic
resonance. If a proton-containing liquid is exposed to a magnetic DC field B, the protons will
precess around the field direction with a frequency f, which is strictly proportional to the
applied field value:
f = 42.5763751 MHz/T · B
This relation is independent on ambient circumstances. Thus, by exact measurement of the
precession frequency f, an exact, absolute figure of the actual field value can be achieved.
The signal from the precessing protons is, however, very weak, because the signal amplitude
depends on the polarisation of the protons, which is very low at low field values. In order to
2
increase the proton polarisation, "dynamic nuclear polarisation" or the "Overhauser effect" is
utilised.
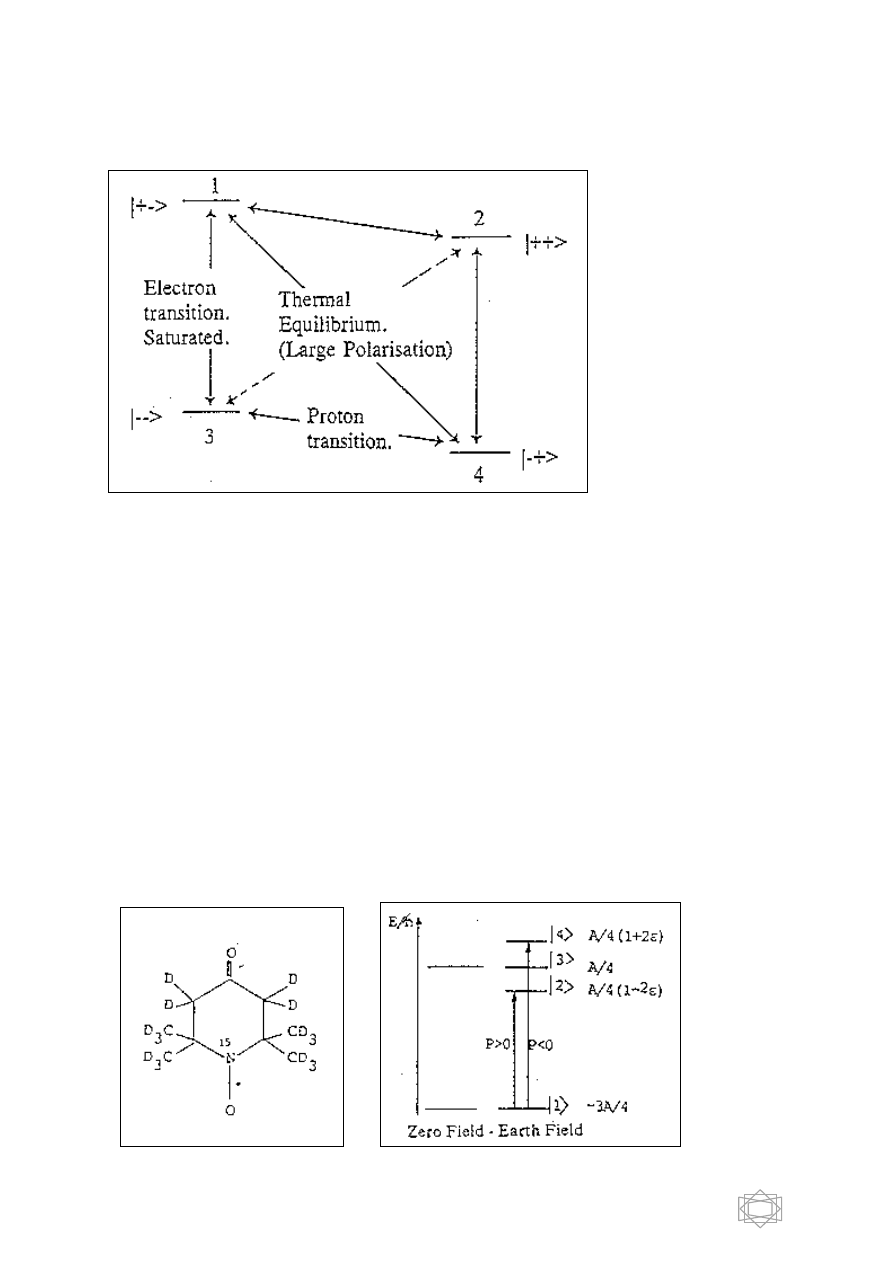
Fig.1. Energy diagram for the electron-proton system. The signs in the notations |+->.. refer to the
spin directions of the electron and the proton, respectively. This coupling type emphasises transition
1-4, while all other transitions are far less probable. Therefore, levels 1 and 4 are in thermal
equilibrium, meaning that the population difference between the levels is large corresponding to the
(relatively) large energy difference for this electronic transition. Applying a signal with proper
amplitude and frequency will saturate transition 3-1 which means that the populations in levels 1
and 3 are forced to be equal. As a result, levels 3 and 4 will have the same large population difference
as levels 1-4 and the same large polarisation of the protons.
The Overhauser effect presumes that unpaired electrons, as free radicals, are also present in
the liquid. (Fig.1). When the electrons are exposed to an alternating field with a frequency
corresponding to the energy difference between two electron levels, transitions will occur
from the lower to the upper level. Further, when a sufficient strong alternating field is
applied, this transition may be saturated, i.e. the electronic level populations are nearly equal.
Due to coupling between the protons in the liquid and the electrons in the radical, the protons
will take part in this transition as well. The proton transitions produce pronounced changes of
the populations in the different proton states, which again leads to a dramatic enhancement of
the proton polarisation.
a.
b.
3
Fig.2. Configuration (a) and electronic energy levels (b) of Tempone.
In LETI's magnetometer, electrons are supplied in a nitroxide radical (Tempone), which is
dissolved in the liquid. The difference between the energy levels in this particular radical
corresponds to a frequency of about 56 MHz. (Fig.2). There are in this case two different
electronic transitions, which may be excited, one giving a positive proton polarisation, and
another giving a negative polarisation. (Ref.1).
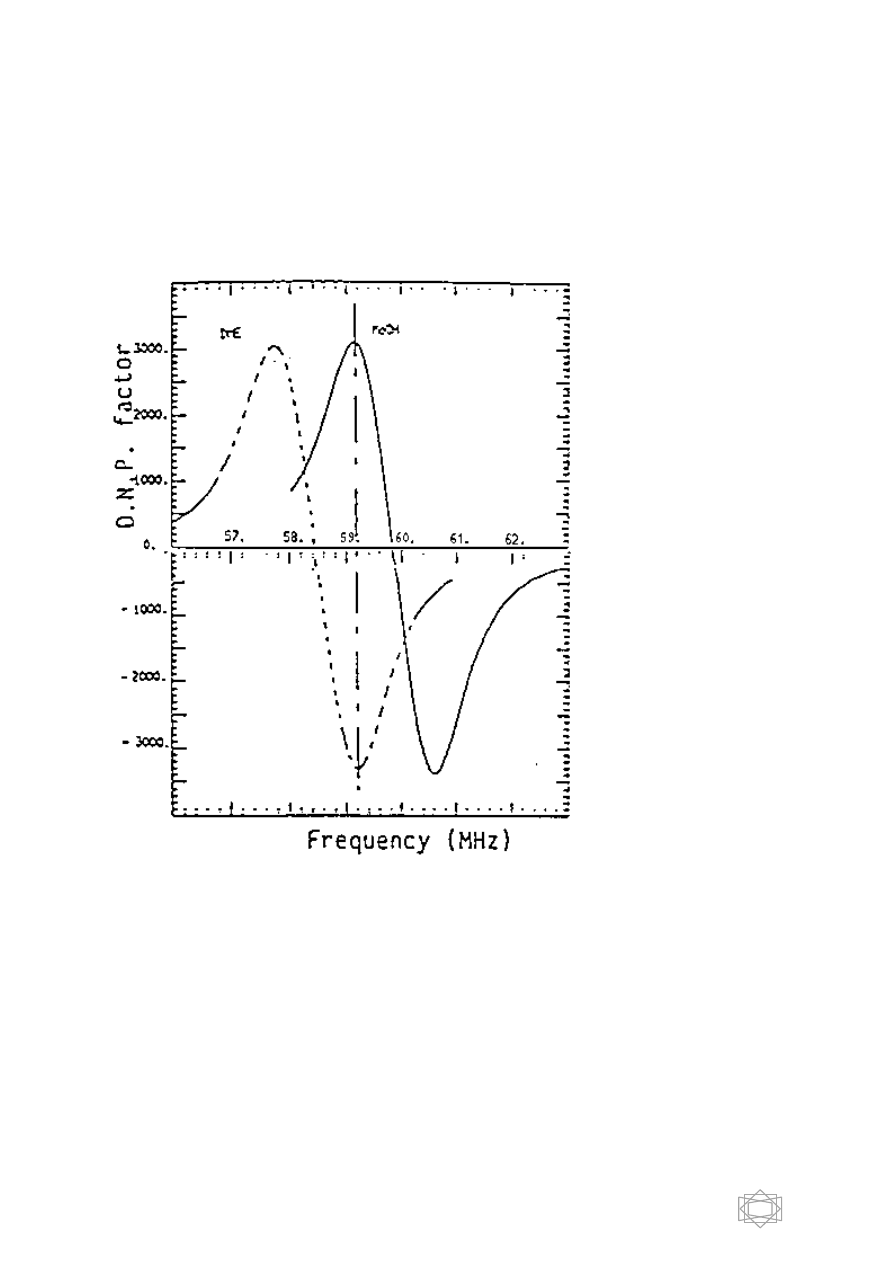
Fig.3. Dynamic Nuclear Polarisation (DNP) versus applied signal frequency for Tempone dissolved in
two different solvents. At a certain frequency (59 MHz), the two polarisations are equal in magnitude
and opposite to each other.
In addition, the frequency of both transitions are dependent also on the kind of solvent which
is used. So, by choosing two different, suitable solvents, we may achieve polarisations
opposite to each other in the two liquids as shown Fig.3.
4
Description of the instrument
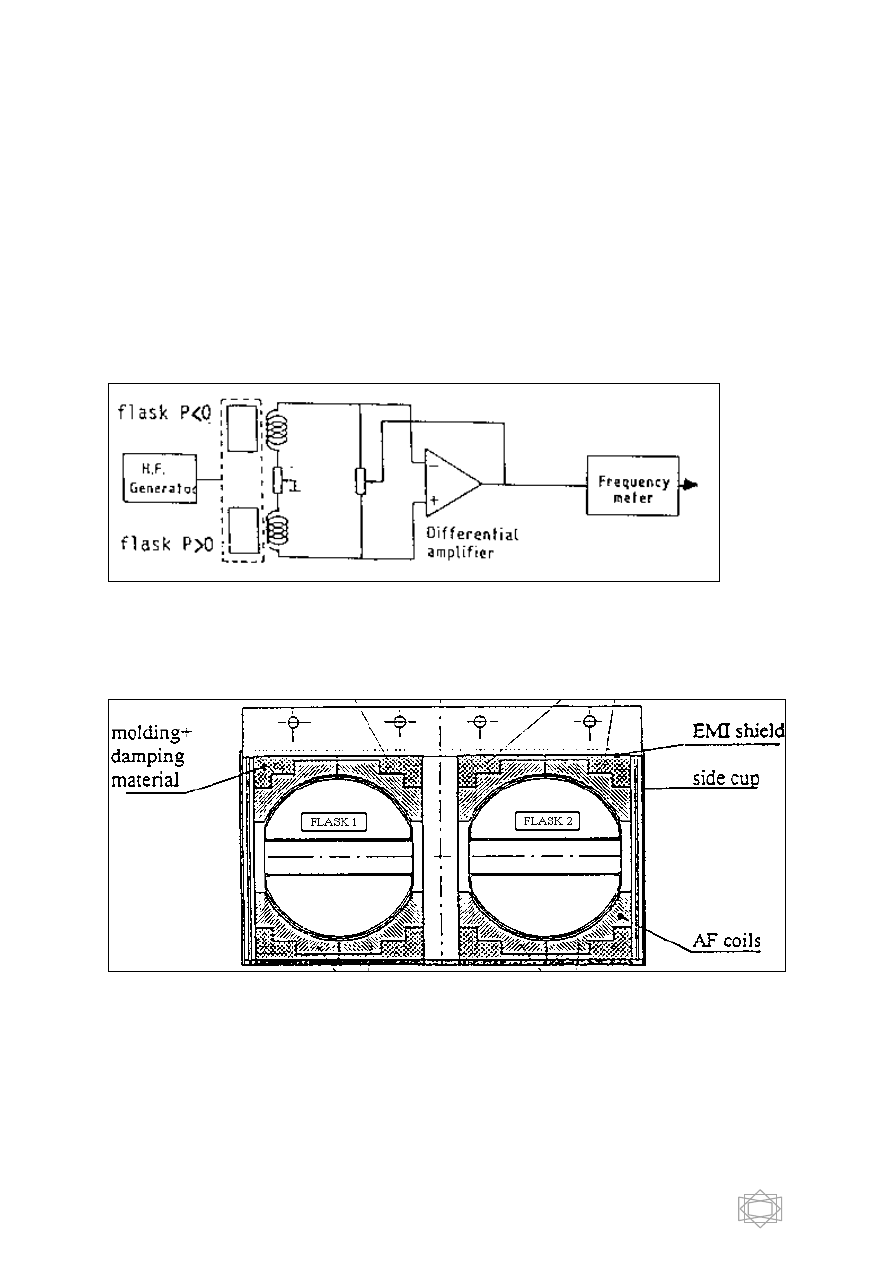
The sensor is constituted by two flasks containing two different solvents. The two flasks are
each placed in a high frequency resonator, which produce a positive polarisation in one flask
and a negative polarisation in the other, according to the context just explained. The
measuring circuit include two symmetric coils around each flask and resonator. The coils
induce the proton resonance and pick up the signal from the precessing protons. Next, the two
proton signals of opposite signs are amplified by a differential amplifier and reinjected in
common mode to produce the proton resonance excitation field. Thus, the resulting signal
after the amplifier will be double the corresponding signal from each flask, while external
electromagnetic noise, which is detected in symmetrical mode by the coils, will be cancelled.
(Ref.1,2).
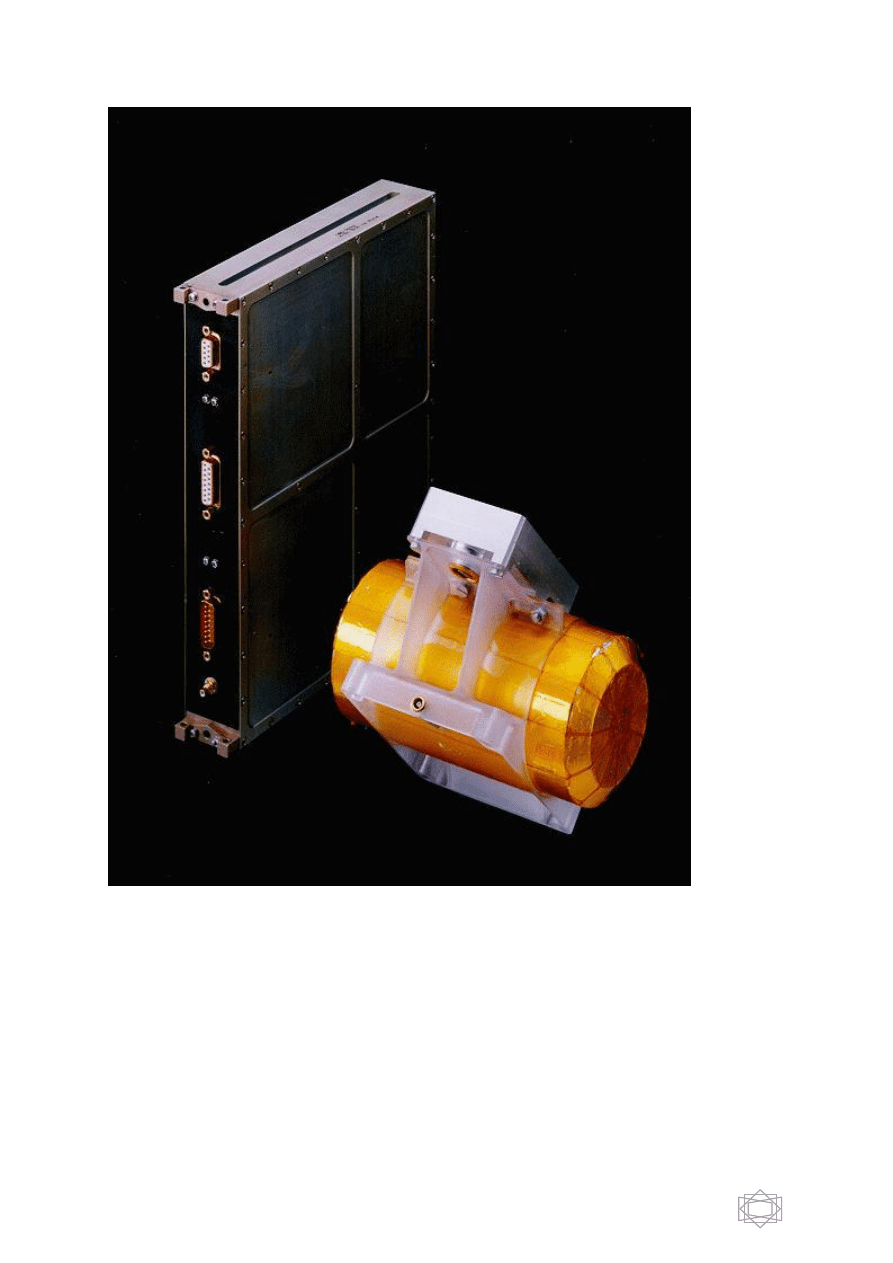
Fig.4. LETI's scalar magnetometer consisting of a sensor, a high frequency generator, an amplifier
and a frequency meter.
Fig.5. Design of LETI's magnetometer sensor.
The two sphere-shaped flasks constitute the inner parts of two coaxial resonators which
provide the high frequency electronic excitation (Fig.5). The resonators and the low
frequency coils around them are carefully shaped as to achieve the optimal proton precession
5
signal for any orientation of the earth field direction with respect to the sensor axis. (Ref.2).
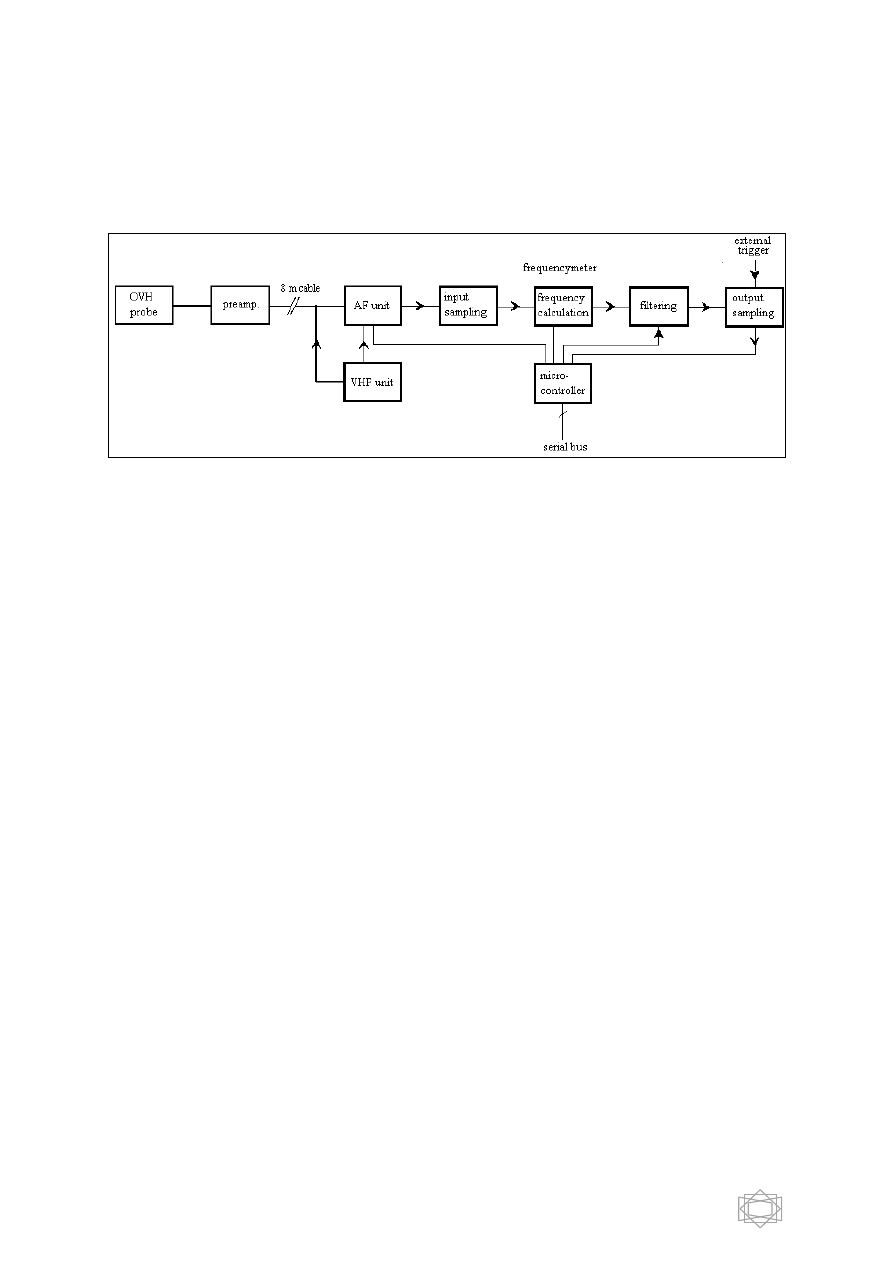
The sensor and the preamplifier is positioned at the end of the 8 meter boom, while the other
electronic parts are placed in an aluminium box in the satellite main body. The box contains
the high frequency generator, the low frequency unit with a tracking filter, the digital
frequency meter, a digital filter and a microcontroller.
Fig.6. Configuration of the instrument onboard the satellite.
The instrument will be controlled and the measurement data will be digitally transferred
through a serial RS 485 line. All measurement acquisitions will be synchronised by external
pulses occurring every second on a special line. The power constraint and the wanted
possibility of measuring very low field values, combined with the 8 meter separation between
sensor and electronics has required development of a number of new technological
improvements by LETI. (Ref.2,3).
Calibration of the OVM
A calibration of the Overhauser magnetometer took place at the magnetic facility of the
Technical University Braunschweig during the week April 18. to 21., 1995.
During test and calibration, the magnetometer proved to be a very reliable instrument for
determination of the modulus of the magnetic field. (Ref.4). In static fields the value of the
field magnitude was returned with an uncertainty of about .25 nT irrespectively of the field
direction and of field strength within the operational range of 16000 to 56000 nT. The
dynamic characteristics allow the instrument to follow field changes of more than 100 nT per
second. In orbit, the maximum change rates are about 30 nT per second. Electronic
compatibility with the CSC vector magnetometer was also tested with the result that the
OVM produced no detectable interferences at realistic separation distances. Also, the OVM
functioned nominally in the presence of the working CSC magnetometer.
6
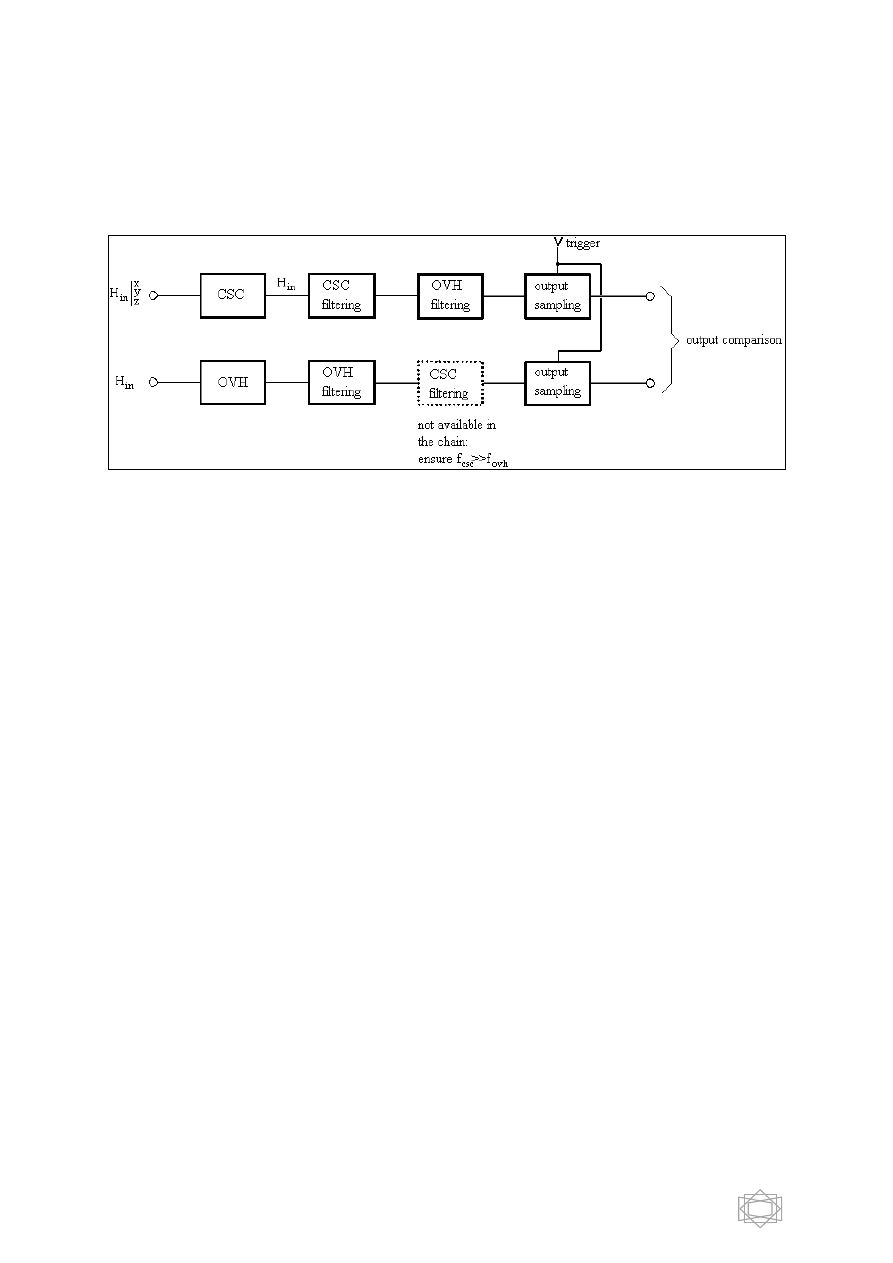
CSC calibration in orbit
The suggested arrangement for cross- calibration of the CSC against the OVM is shown
Fig.7. A detailed explanation of the digital frequency meter and the filter is given in Ref.3.
Fig.7. Diagram for in-flight calibration of CSC against OVM.
An algorithm has been written for this calibration, based on the formalism proposed by R. L.
Langel, which uses a least squares fit to a polynomial expansion of the CSC magnetic field
sensitivity. Tests of the algorithm proved it to be very robust.
Final test
A final, integrated test of the satellite was performed in January 97 at the German satellite
test stadion IABG in Munich. Mechanical and thermal qualification tests were performed, as
well as an intercalibration between the CSC and OVM instruments. The test concluded, that
the OVM fulfils completely all performance specifications, and is now ready for flight.
7
References
1. N. Kernevez, H. Glenat: Description of a high sensitivity CW scalar DNP-NMR
magnetometer. IEEE Transactions on Magnetics, Vol. 27, No. 6, Nov. 91.
2. D. Duret et al.: Overhauser magnetometer for the Danish Ørsted satellite. Intermag
Conference 95. To be published Dec. 95.
3. D. Duret et al.: Functional description of the LETI OVH magnetometer for the Ørsted
mission. LETI/Ørsted report February 94.
4. H. Lühr, M. Rahm: Calibrations for Ørsted. Report OE-IGM-TR-0001 from Institute
for Geophysics and Meteorology, Technical University Braunschweig. May 95.

8
5. T. Neubert: CSC-OVH in-flight calibration. Ørsted Science Data Centre Technical
Note 15-TN 268. February 95.
May 1997.
Wyszukiwarka
Podobne podstrony:
07 Study of the Behavior of Magnetic Microactuators
1956 The equilibrium of magnetic Stars Chandrasekhar
Concentration and the Acquirement of Personal Magnetism O Hashnu Hara
Effect of magnetic field on the performance of new refrigerant mixtures
Overhauling the flow distributor
Aspden POWER FROM MAGNETISM THE POTTER DEBATE (1994)
Overhauling the flow distributor
Patent Of The Permanent Magnet Machine
Vlaenderen A generalisation of classical electrodynamics for the prediction of scalar field effects
Proton Magnetic Resonance Spectroscopy of the Medial Prefrontal Cortex in Patients With Deficit Schi
Whittaker E T On an Expression of the Electromagnetic Field due to Electrons by means of two Scalar
Grasso, Rubinstein Magnetic fields in the early universe (PR348, 2001)(104s)
The Earth s Magnetic Field1(1)
Application of Magnetic Resonance Spectroscopy in the Mental Diseases of Schizophrenia and Autism
więcej podobnych podstron