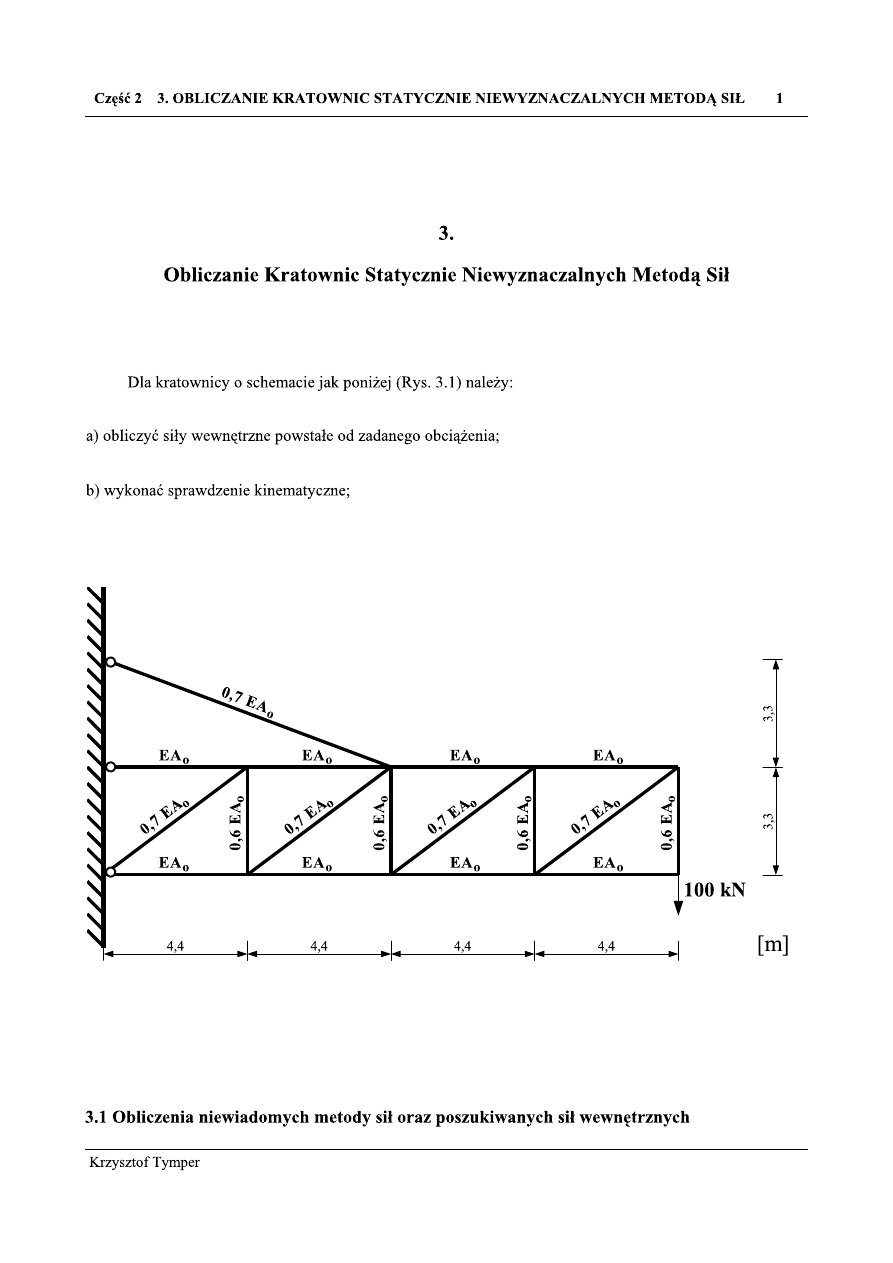
Rys. 3.1 Rozpatrywana kratownica
Mechanika Budowli
AlmaMater
Zgodnie ze sposobem rozwiązywania układów statycznie niewyznaczalnych (hiperstatycznych)
metodą sił, zamieniamy rozpatrywany, jednokrotnie statycznie niewyznaczalny układ (Rys. 3.1.1 a)), na tzw.
układ podstawowy (układ zastępczy), tak samo obciążony i geometrycznie identyczny z rozpatrywanym ale
statycznie wyznaczalny (Rys. 3.1.1 b)).
[m]
4,4
3
,3
4,4
4,4
4,4
3
,3
1
1
[m]
4,4
3
,3
4,4
4,4
4,4
3
,3
[m]
3
,3
3
,3
K
5
K
1
K
2
K
3
K
4
G
1
G
2
G
3
G
4
D
1
D
2
D
3
D
4
S
1
S
2
S
3
S
4
K
1
G
1
D
1
K
2
G
2
D
2
K
3
G
3
D
3
K
4
G
4
D
4
K
5
K
5
S
1
S
2
S
3
S
4
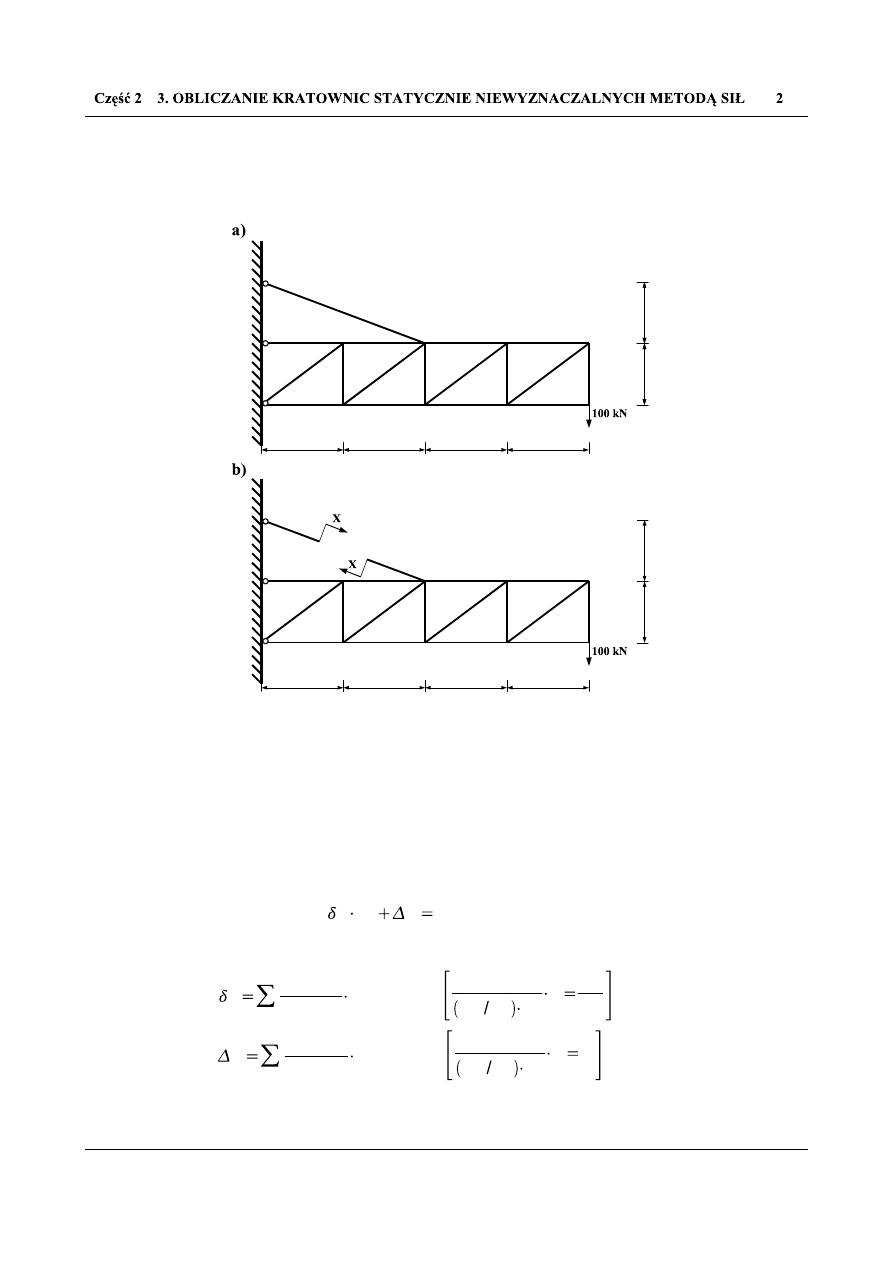
Rys. 3.1.1 Dany układ: a) rzeczywisty jednokrotnie statycznie niewyznaczalny; b) układ podstawowy (zastępczy),
statycznie wyznaczalny, z niewiadomą siłą X
1
Powyższy układ podstawowy (Rys. 3.1.1 b)) dla dowolnych X
1
nie spełnia warunku identyczności
kinematycznej z rzeczywistym układem, ponieważ dozna on przemieszczenia na końcach rozciętego pręta.
Aby spełnić ten warunek, do układu podstawowego wprowadzamy dodatkowy warunek na X
1
, w postaci
równania liniowego (tzw. równania kanonicznego), wyrażających zgodność przemieszczeń układu
rzeczywistego i podstawowego, przez liczenie przemieszczeń w układzie statycznie wyznaczalnym, takich
punktów, których znamy konkretne wartości w układzie statycznie niewyznaczalnym. Dla naszego
przypadku równanie kanoniczne przyjmie postać (3.1.1):
1 1
X
1
1 p
0
(3.1.1)
gdzie δ
11
i ∆
1p
to odpowiednie przemieszczenia wyrażone następującymi wzorami:
1 1
j
S
j
1
S
j
1
EA
j
l
j
1
kN m
2
m
2
m
m
kN
(3.1.2)
1 p
j
S
j
1
S
j
p
EA
j
l
j
kN
kN m
2
m
2
m m
(3.1.3)
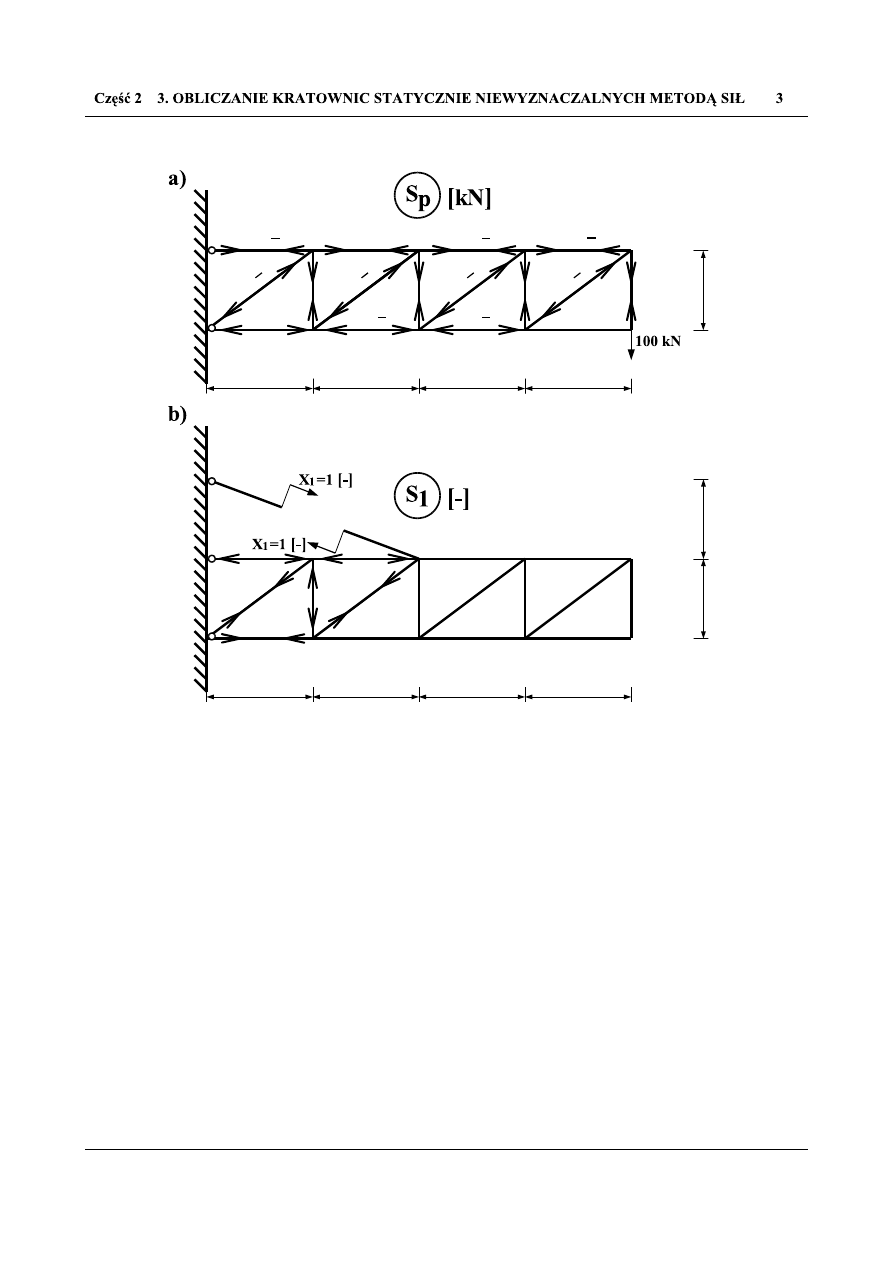
W celu obliczenia powyższych współczynników (3.1.2 i 3.1.3), znajdujemy odpowiednie wielkości sił
normalnych w danych prętach kratownicy (Rys. 3.1.2).
Krzysztof Tymper Mechanika Budowli
AlmaMater
[m]
4,4
3
,3
4,4
4,4
4,4
3
,3
[m]
4,4
3
,3
4,4
4,4
4,4
533
1
3
400
266
2
3
133
1
3
266
2
3
133
1
3
0
400
100
100
100
100
16
6
2
3
16
6
2
3
16
6
2
3
16
6
2
3
0,468
1,872
0,351
0
0
0
0
0
0
0
0
0
0
0,5
85
0,5
85
1,404
Rys. 3.1.2 Wartości siły normalnej w danych prętach kratownicy, w układzie podstawowym powstałe wskutek
działania: a) obciążenia zewnętrznego; b) siły jedynkowej przyłożonej w miejsce niewiadomej X
1
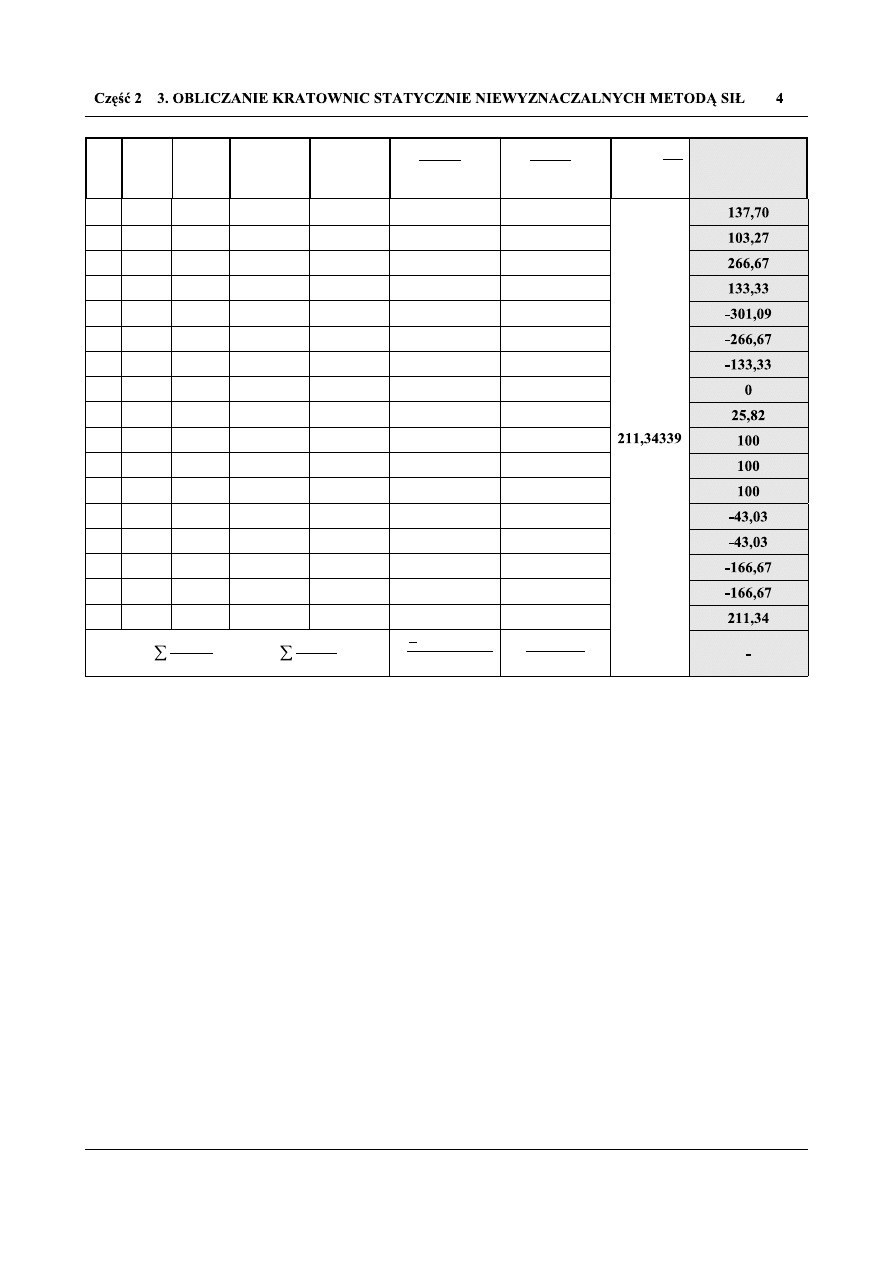
Poszukiwane współczynniki otrzymano po odpowiednich sumowaniach (Tab. 3.1.1), a następnie na ich
podstawie uzyskano wartość poszukiwanej niewiadomej X
1
(Tab. 3.1.1), co z kolei pozwoliło na znalezienie
poszukiwanych rzeczywistych sił wewnętrznych w rozpatrywanym układzie statycznie niewyznaczalnym
(Tab. 3.1.1 oraz Rys.3.1.3).
Tab. 3.1.1 Obliczenia poszukiwanych sił wewnętrznych
Krzysztof Tymper Mechanika Budowli
AlmaMater
Pręt
l
j
[m]
EA
j
[kN]
S
(j)
P
[kN]
S
(j)
1
[-]
S
j
1
S
j
P
EA
j
⋅
l
j
[m]
S
j
1
S
j
1
EA
j
⋅
l
j
[m/kN]
X
1
=
−
1 p
1 1
[kN]
S
(j)n
= S
(j)
1
.
X
1
+S
(j)
P
[kN]
G
1
4,4
EA
0
533,3333
-1,872
-4392,95973
15,41929
G
2
4,4
EA
0
400
-1,404
-2471,04
8,67335
G
3
4,4
EA
0
266,6667
0
0
0
G
4
4,4
EA
0
133,3333
0
0
0
D
1
4,4
EA
0
-400
0,468
-823,68
0,96371
D
2
4,4
EA
0
-266,6667
0
0
0
D
3
4,4
EA
0
-133,3333
0
0
0
D
4
4,4
EA
0
0
0
0
0
S
1
3,3
0,6 EA
0
100
-0,351
-193,05386
0,67762
S
2
3,3
0,6 EA
0
100
0
0
0
S
3
3,3
0,6 EA
0
100
0
0
0
S
4
3,3
0,6 EA
0
100
0
0
0
K
1
5,5
0,7 EA
0
-166,6667
0,585
-766,08644
2,68896
K
2
5,5
0,7 EA
0
-166,6667
0,585
-766,08644
2,68896
K
3
5,5
0,7 EA
0
-166,6667
0
0
0
K
4
5,5
0,7 EA
0
-166,6667
0
0
0
K
5
9,3984 0,7 EA
0
0
1
0
13,42655
1 p
=
j
S
j
1
S
j
p
EA
j
⋅
l
j
,
1 1
=
j
S
j
1
S
j
1
EA
j
⋅
l
j
9412,90647
EA
0
44,53845
EA
0
Krzysztof Tymper Mechanika Budowli
AlmaMater
[m]
4,4
3,
3
4,4
4,4
4,4
3,
3
o
o
o
o
o
o
o
o
[m]
4,4
3,
3
4,4
4,4
4,4
103,27
0
301,09
25,82
100
100
100
211,3
4
137,70
43
,03
43
,03
266,67
133,33
266,67
133,33
16
6,6
7
16
6,6
7
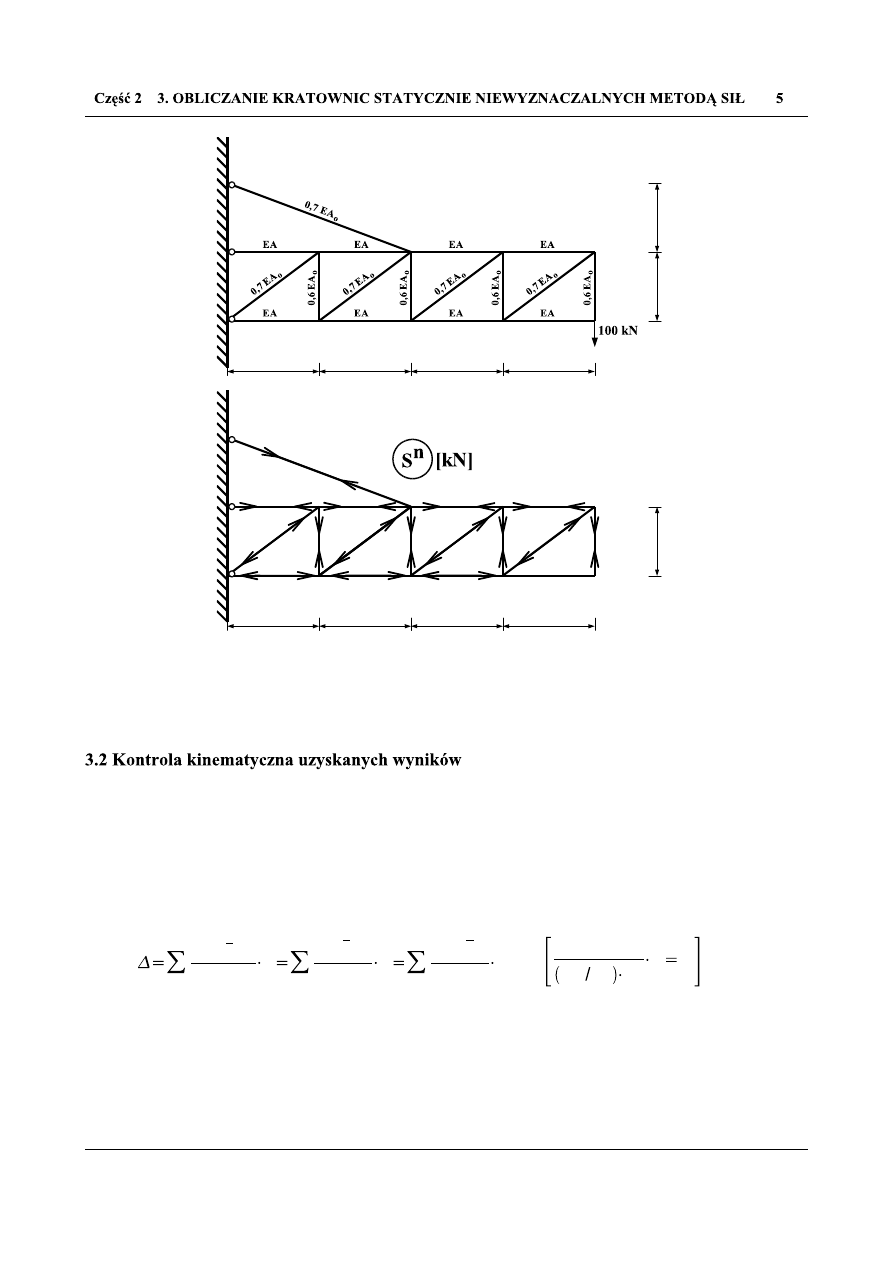
Rys. 3.1.3 Zestawienie wyników (rzeczywistych wartości siły normalnej w danych prętach) dla rozpatrywanej
kratownicy statycznie niewyznaczalnej
Jest to najważniejsze sprawdzenie w metodzie sił, gdyż dopiero one daje nam pewność poprawności
uzyskanych wyników. Polega na wykazaniu, że dla wybranych punktów (na ogól punktów, które nie doznają
przemieszczeń
w
układzie
statycznie
niewyznaczalnym)
przemieszczenia
są
równe
wartościom
rzeczywistym tam występującym. Przemieszczenia wyliczymy korzystając z równania pracy wirtualnej oraz
z twierdzeń redukcyjnych, z których wynika, że licząc przemieszczenia w układzie statycznie
niewyznaczalnym, jeden ze stanów (rzeczywisty lub wirtualny), możemy wyliczyć dla dowolnego układu
podstawowego (3.2.1).
j
S
j
n
S
j
n
EA
j
l
j
j
S
o
j
S
j
n
EA
j
l
j
j
S
j
n
S
o
j
EA
j
l
j
kN
kN m
2
m
2
m m
(3.2.1)
Z uwagi na specyfikę oraz prostotę rozpatrywanej przez nas kratownicy (układ jednokrotnie wewnętrznie
statycznie niewyznaczalny), kontrola kinematyczna nie jest w tym przypadku do końca miarodajna. Wynika
to z faktu, że w
szystkie możliwe do zastosowania układy podstawowy są ze sobą tożsame. Dlatego sprawdzenia
dokonamy (Tab. 3.2.1) wykorzystując ten sam co poprzednio (użyty podczas liczenia współczynników równania
kanonicznego) układ podstawowy (Rys. 3.1.1 b)).
Krzysztof Tymper Mechanika Budowli
AlmaMater
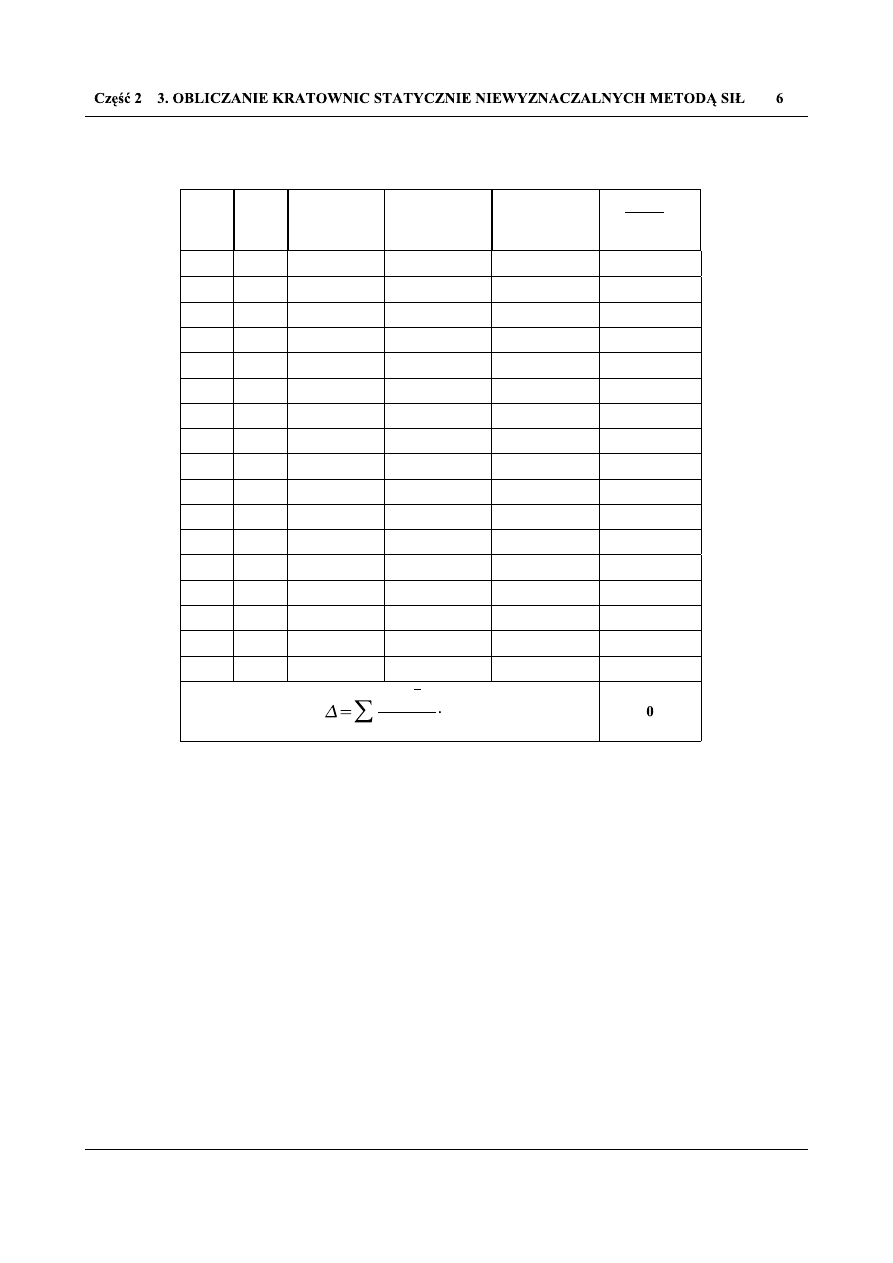
Tab. 3.2.1 Kontrola kinematyczna rozpatrywanego układu kratowego
Pręt
l
j
[m]
EA
j
[kN]
S
j
n
[kN]
S
o
j
[-]
S
j
n
S
o
j
EA
j
⋅
l
j
[m]
G
1
4,4
EA
0
137,70
-1,872
-1134,19482
G
2
4,4
EA
0
103,27
-1,404
-637,98474
G
3
4,4
EA
0
266,67
0
0
G
4
4,4
EA
0
133,33
0
0
D
1
4,4
EA
0
-301,09
0,468
-620,00719
D
2
4,4
EA
0
-266,67
0
0
D
3
4,4
EA
0
-133,33
0
0
D
4
4,4
EA
0
0
0
0
S
1
3,3
0,6 EA
0
25,82
-0,351
-49,84355
S
2
3,3
0,6 EA
0
100
0
0
S
3
3,3
0,6 EA
0
100
0
0
S
4
3,3
0,6 EA
0
100
0
0
K
1
5,5
0,7 EA
0
-43,03
0,585
-197,79158
K
2
5,5
0,7 EA
0
-43,03
0,585
-197,79158
K
3
5,5
0,7 EA
0
-166,67
0
0
K
4
5,5
0,7 EA
0
-166,67
0
0
K
5
9,3984
0,7 EA
0
211,34
1
2837,61346
j
S
j
n
S
o
j
EA
j
l
j
Na zakończenie warto dodać że w przypadku bardziej skomplikowanych układów kratowych wewnętrznie
statycznie niewyznaczalnych sprawdzenia uzyskanych wyników można również dokonać w następujący
sposób:
- obliczyć rzeczywiste przemieszczenie danego punktu, w dwóch różnych układach dla wirtualnego stanu
obciążenia (wykorzystując twierdzenie redukcyjne w dwóch różnych układach podstawowych), które musi
być takie samo;
- ponownie przeprowadzić obliczenia metodą sił, ale dla innego układu podstawowego i porównać
otrzymane w ten sposób wyniki, z wyliczonymi wcześniej;
Krzysztof Tymper Mechanika Budowli
AlmaMater
Wyszukiwarka
Podobne podstrony:
Metoda sił kratownica
Metoda sił, projekt-kratownica
Metoda sił projekt kratownica
Metoda sił ćwiczenie nr 2 kratownica statycznie niewyznaczalna
cwicz mechanika budowli obliczanie ukladow statycznie niewyznaczalnych metoda sil krata
metoda sił pale Model
Metoda Sil 2
Mechanika budowli Metoda sił belka
Projekt I Rama Metoda Sił
metoda sil 2 id 294543 Nieznany
Metoda sił rama8
Metoda sil cz 3 Płaskie ustroje prętowe obciążone w płaszczyźnie
Obliczanie układów statycznie niewyznaczalnych metoda sił z wykorzystaniem symetrii i antysymetrii
Tabela osiowe metoda sił
Obliczanie układów statycznie niewyznaczalnych metoda sił z wykorzystaniem symetrii i antysymetrii
Metoda sil 3
więcej podobnych podstron