
Rachunek ró˙zniczkowy i całkowy funkcji wielu zmiennych
Przestrze ´
n R
k
B˛edziemy rozpatrywali funkcje wielu zmiennych postaci
f : R
k
→ R,
(x
1
, x
2
, . . . , x
k
)
→ f(x
1
, x
2
, . . . , x
k
)
Rozpoczniemy od omówienia podstawowych własno´sci przestrzeni R
k
. Pami˛eta-
my, ˙ze szczególny przypadek k = 2 odpowiada płaszczy´znie R
2
, natomiast k = 3
— przestrzeni trójwymiarowej R
3
. Niech b˛ed ˛
a dane elementy przestrzeni R
k
po-
staci
x = (x
1
, x
2
, . . . , x
k
),
y = (y
1
, y
2
, . . . , y
k
)
Struktur˛e przestrzeni liniowej (przestrzeni wektorowej) w R
k
zadaj ˛
a nast˛epuj ˛
a-
ce zwi ˛
azki definiuj ˛
ace sum˛e wektorów x i y oraz iloczyn wektora przez liczb˛e
rzeczywist ˛
a (skalar) λ
x + y = (x
1
+ y
1
, x
2
+ y
2
, . . . , x
k
+ y
k
)
λx = (λx
1
, λx
2
, . . . , λx
k
)
Zauwa˙zmy, ˙ze powy˙zsze wzory s ˛
a k-wymiarowym uogólnieniem dobrze znanych
ze szkoły ´sredniej wzorów na dodawanie wektorów x = [x
1
, x
2
] oraz y = [y
1
, y
2
]
z R
2
i mno˙zenie wektora przez liczb˛e rzeczywist ˛
a λ
x + y = [x
1
+ y
1
, x
2
+ y
2
],
λx = [λx
1
, λx
2
]
gdzie wektor o okre´slonych współrz˛ednych zapisywany jest za pomoc ˛
a nawiasów
kwadratowych, a nie jak w przyj˛etej przez nas konwencji przy u˙zyciu nawiasów
okr ˛
agłych.
Baza kanoniczna e
i
, i = 1, 2, . . . , k w R
k
zdefiniowana jest nast˛epuj ˛
aco
e
i
= (0, 0, . . . , 0, 1
i
, 0, . . . 0),
i = 1, 2, . . . , k
gdzie 1 znajduje si˛e na i-tym miejscu (wszystkie pozostałe współrz˛edne s ˛
a równe
0). Baza kanoniczna jest naturalnym k-wymiarowym uogólnieniem znanego Pa´n-
stwu układu wersorów osi współrz˛ednych. W przypadku płaszczyzny R
2
i układu

współrz˛ednych xy, e
1
= (1, 0) i e
2
= (0, 1). W przypadku R
3
i układu współ-
rz˛ednych xyz mamy e
1
= (1, 0, 0), e
2
= (0, 1, 0) oraz e
3
= (0, 0, 1). Wykorzy-
stuj ˛
ac reguły dodawania wektorów w R
k
i mno˙zenia ich przez liczby mo˙zemy
zapisa´c dowolny wektor za pomoc ˛
a wektorów bazy kanonicznej nast˛epuj ˛
aco
(x
1
, x
2
, . . . , x
k
) = x
1
(1, 0, . . . , 0) + x
2
(0, 1, . . . , 0) + . . . + x
k
(0, 0, . . . , 1)
czyli w zapisie wektorowym przyjmuj ˛
ac x = (x
1
, x
2
, . . . , x
k
)
x = x
1
e
1
+ x
2
e
2
+ . . . x
k
e
k
Wykorzystuj ˛
ac symbol sumy sko´nczonej mo˙zemy powy˙zszy wzór zapisa´c w pro-
stej postaci
x =
k
∑
i=1
x
i
e
i
gdzie współczynniki x
i
, i = 1, . . . , k s ˛
a nazywane współrz˛ednymi wektora x w
bazie e
i
, i = 1, . . . , k.
Struktura przestrzeni wektorowej z okre´slonym dodawaniem wektorów i mno-
˙zeniem ich przez liczby jest zbyt uboga dla uogólnienia analizy matematycznej
na przypadek funkcji wielu zmiennych. Rzeczywi´scie nie daje ona mo˙zliwo´sci
zdefiniowania blisko´sci elementów niezb˛ednej dla wprowadzenia poj˛e´c takich jak
granica funkcji. Okazuje si˛e, ˙ze naturalne wielowymiarowe uogólnienie zwi ˛
azku
postaci
|x−y| okre´slaj ˛acego w jednowymiarowym przypadku odległo´s´c liczb rze-
czywistych x i y, otrzymamy wprowadzaj ˛
ac w R
k
iloczyn skalarny. Definiujemy
iloczyn skalarny wektorów x = (x
1
, x
2
, . . . , x
k
) i y = (x
1
, x
2
, . . . , x
k
) z R
k
w
nast˛epuj ˛
acy sposób
x
· y = x
1
y
1
+ x
2
y
2
+ . . . x
k
y
k
Zwi ˛
azek ten zapisany za pomoc ˛
a sumy sko´nczonej przyjmuje posta´c
x
· y =
k
∑
i=1
x
i
y
i
Wprost z definicji bazy kanonicznej otrzymujemy
e
i
· e
j
= δ
ij
,
i, j = 1, . . . , k
gdzie δ
ij
jest symbolem Kroneckera. Baza spełniaj ˛
aca powy˙zsze relacje jest na-
zywana baz ˛
a ortonormaln ˛
a.
Iloczyn skalarny ma nastepuj ˛
ace własno´sci
1)
x
· y = y · x
2)
x
· (y + z) = x · y + x · z
3)
x
· λy = λx · y
4)
x
· x > 0 oraz x · x = 0 ⇔ x = 0
gdzie w ostatniej równo´sci 0 oznacza wektor zerowy (wszystkie współrz˛edne ta-
kiego wektora s ˛
a równe zero). Przestrze´n R
k
z iloczynem skalarnym spełniaj ˛
a-
cym powy˙zsze zwi ˛
azki jest przykładem sko´nczenie wymiarowej przestrzeni Hil-
berta. Zadanie. Pokaza´c, ˙ze współczynniki x
i
rozwini˛ecia wektora x w bazie e
i
,
i = 1, . . . , k s ˛
a równe x
i
= x
· e
i
.
Wykorzystuj ˛
ac własno´sci iloczynu skalarnego łatwo otrzymujemy tzw. nie-
równo´s´c Schwarza
(x
· y)
2
6 x
2
y
2
gdzie x
2
≡ x · x i y
2
≡ y · y.
Dowód. Mamy dla dowolnego λ
∈ R
(x + λy)
· (x + λy) > 0
St ˛
ad
x
2
+ 2λx
· y + λ
2
y
2
> 0
Teraz, dla y = 0 nierówno´s´c Schwarza jest oczywista. Podstawiaj ˛
ac w przypadku
y
̸= 0
λ =
−
x
· y
y
2
otrzymujemy nierówno´s´c Schwarza, co ko´nczy dowód.
Wykorzystuj ˛
ac iloczyn skalarny mo˙zemy w naturalny sposób okre´sli´c długo´s´c
wektora x
∈ R
k
. Mianowicie
|x| :=
√
x
· x =
√
x
2
=
√
x
2
1
+ x
2
2
+ . . . + x
2
k
Zadanie. Rozwa˙zy´c wektory na płaszczy´znie x = (x
1
, x
2
) i y = (y
1
, y
2
), zacze-
pione w pocz ˛
atku układu współrz˛ednych. Pokaza´c, ˙ze x
· y = |x||y| cos α, gdzie
α jest k ˛
atem pomi˛edzy wektorami x i y.
Zauwa˙zmy, ˙ze wykorzystuj ˛
ac definicj˛e długo´sci wektora mo˙zemy zapisa´c nie-
równo´s´c Schwarza w nast˛epuj ˛
acej postaci
|x · y| 6 |x||y|
Nierówno´s´c ta jest oczywista w przypadku znanej Pa´nstwu ze szkoły ´sredniej de-
finicji iloczynu skalarnego x
·y = |x|y| cos α. Wystarczy uwzgl˛edni´c nierówno´s´c
| cos α| 6 1.
Długo´s´c wektora czyli tzw. norma wektora ma nast˛epuj ˛
ace własno´sci
1)
|λx| = |λ||x|
2)
|x + y| 6 |x| + |y|,
(nierówno´s´c tójk ˛
ata)
3)
|x| = 0 ⇔ x = 0
Zadanie. Pokaza´c, ˙ze z powy˙zszych warunków wynika nierówno´s´c
|x| > 0 dla
dowolnego x
∈ R
k
. Przestrze´n wektorowa V z funkcj ˛
a
| · | : V → R, spełnia-
j ˛
ac ˛
a powy˙zsze warunki (norm ˛
a) nazywamy przestrzeni ˛
a unormowan ˛
a. Przestrze´n
R
k
z norm ˛
a
|x| =
√
x
2
, nazywamy k-wymiarow ˛
a rzeczywist ˛
a przestrzeni ˛
a eu-
klidesow ˛
a. Za pomoc ˛
a długo´sci (normy) wektora mo˙zemy zdefiniowa´c odległo´s´c
d(x, y) punktów w R
k
nast˛epuj ˛
aco
d(x, y) =
|x − y|
St ˛
ad dla x = (x
1
, . . . , x
k
) oraz y = (y
1
, . . . , y
k
)
d(x, y) =
√
(x
− y)
2
=
√
(x
1
− y
1
)
2
+ . . . + (x
k
− y
k
)
2
Jak nietrudno zauwa˙zy´c w jednowymiarowym przypadku powy˙zszy zwi ˛
azek re-
dukuje si˛e do
d(x, y) =
√
(x
− y)
2
=
|x − y|

Operator liniowy
Odwzorowanie L : R
k
→ R
s
nazywamy operatorem liniowym, je˙zeli spełnia ono
nast˛epuj ˛
ace warunki
L(x + y) = Lx + Ly
(addytywno´s´c)
L(λx) = λLx
(jednorodno´s´c)
W szczególnym przypadku s = 1, tzn. kiedy L : R
k
→ R odwzorowanie L
nazywamy funkcjonałem liniowym.
Przykład
Odwzorowanie L : R
k
→ R
k
zdefinowane nast˛epuj ˛
aco
Lx = (a
· x)b
jest odzorowaniem liniowym. Mamy bowiem wykorzystuj ˛
ac własno´sci 2) i 3) ilo-
czynu skalarnego
L(x + y) =[a
· (x + y)]b = (a · x + a · y)b = (a · x)b + (a · y)b
=Lx + Ly
L(λx) =(a
· λx)b = (λa · x)b = λ(a · x)b = λLx
Analogicznie odwzorowanie L : R
k
→ R postaci
Lx = a
· x
jest funkcjonałem liniowym. Wynika to natychmiast z własno´sci 2) i 3) iloczynu
skalarnego. Mianowicie
L(x + y) =a
· (x + y) = a · x + a · y = Lx + Ly
L(λx) =a
· λx = λa · x = λLx
Zauwa˙zmy na koniec, ˙ze dowolnemu operatorowi liniowemu L : R
k
→ R
k
od-
powiada macierz kwadratowa [L
ij
]. Rzeczywi´scie, niech e
i
, i = 1, . . . , k b˛edzie

baz ˛
a ortonormaln ˛
a przestrzeni R
k
. Elementy macierzowe L
ij
operatora L zdefi-
niowane s ˛
a nast˛epuj ˛
aco
L
ij
= e
i
· Le
j
Składowe wektora Lx w bazie e
i
wyra˙zaj ˛
a si˛e przez elementy macierzowe za
pomoc ˛
a wzoru
(Lx)
i
=e
i
· Lx = e
i
· L
k
∑
j=1
x
j
e
j
= e
i
·
k
∑
j=1
L(x
j
e
j
) =
k
∑
j=1
e
i
· x
j
Le
j
=
k
∑
j=1
x
j
e
i
· Le
j
=
k
∑
j=1
L
ij
x
j
Funkcje wielu zmiennych
Jak ju˙z wspominali´smy wcze´sniej b˛edziemy zajmowali si˛e badaniem funkcji wie-
lu zmiennych (dokładniej k-zmiennych) postaci f : R
k
→ R. Funkcje takie przy-
porz ˛
adkowuj ˛
a elementowi (x
1
, . . . , x
k
)
∈ R
k
liczb˛e rzeczywist ˛
a f (x
1
, . . . , x
k
)
b ˛
ad´z równowa˙znie, wykorzystuj ˛
ac struktur˛e przestrzeni liniowej R
k
, wektorowi
x = (x
1
, . . . , x
k
) liczb˛e rzeczywist ˛
a f (x). Wypada zaznaczy´c, ˙ze zapis wektoro-
wy umo˙zliwia zwart ˛
a posta´c wielu wzorów. W przypadku jednej zmiennej u˙zy-
wali´smy litery y na oznaczenie warto´sci funkcji f (x) i pisali´smy y = f (x). W
przypadku funkcji wielu zmiennych warto´sci b˛edziemy oznaczali liter ˛
a u i pisali
u = f (x
1
, . . . , x
k
) albo w zapisie wektorowym u = f (x). W przypadku funkcji
dwóch zmiennych zamiast u = f (x
1
, x
2
) b˛edziemy stosowali zapis z = f (x, y),
co wynika ze standardowego oznaczenia osi współrz˛ednych xyz w R
3
.
W przypadku funkcji jednej zmiennej f (x) mo˙zna j ˛
a było zobrazowa´c za po-
moca wykresu tzn. punktów płaszczyzny R
2
postaci (x, f (x)). Punkty te pa-
rametryzowane s ˛
a przez jedn ˛
a zmienn ˛
a x, sk ˛
ad wynika, ˙ze wykres jest repre-
zentowany przez jednowymiarow ˛
a krzyw ˛
a. W przypadku funkcji wielu zmien-
nych f (x
1
, . . . , x
k
) odpowiednikiem wykresu jest zbiór punktów w R
k+1
po-
staci (x
1
, . . . , x
k
, f (x
1
, . . . , x
k
)). Punkty te s ˛
a parametryzowane przez k zmien-
nych x
1
, . . . , x
k
, co oznacza, ˙ze tworz ˛
a one k-wymiarowy podzbiór (tzw. hiperpo-
wierzchni˛e) przestrzeni R
k+1
. W przypadku dwóch zmiennych hiperpowierzch-
nia składa si˛e z punktów (x, y, f (x, y)) i jest dwuwymiarow ˛
a powierzchni ˛
a zanu-
rzon ˛
a w R
3
.
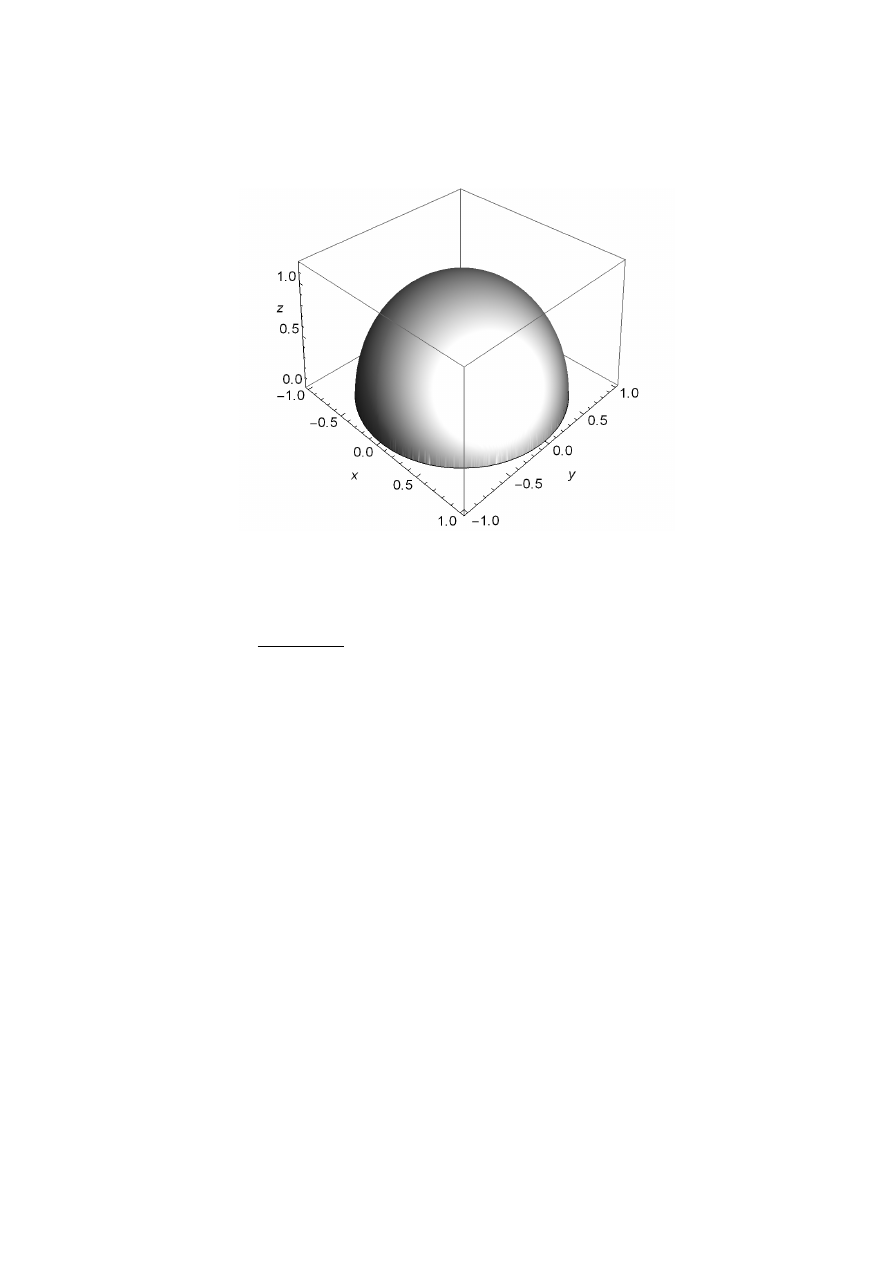
Przykład
Rozpatrzmy funkcj˛e dwóch zmiennych dan ˛
a wzorem
z =
√
1
− x
2
− y
2
Podnosz ˛
ac obie strony powy˙zszego równania do kwadratu widzimy, ˙ze opisuje
ono górn ˛
a połow˛e sfery o ´srodku w punkcie (0, 0, 0) i promieniu równym 1 (patrz
Rysunek)
x
2
+ y
2
+ z
2
= 1
Oczywi´scie dziedzin ˛
a funkcji jest koło
x
2
+ y
2
6 1
W przypadku funkcji trzech zmiennych nie mo˙zemy co prawda zobrazowa´c opi-
sywanej przez ni ˛
a trójwymiarowej hiperpowierzchni zanurzonej w R
4
, mo˙zemy
jednak nadal przedstawi´c graficznie dziedzin˛e takiej funkcji, jako podzbioru R
3
.
Przykład
Rozpatrzmy nast˛epuj ˛
ac ˛
a funkcj˛e trzech zmiennych
u = arcsin(x
1
) + arcsin(x
2
) + arcsin(x
3
)
Poniewa˙z dziedzin ˛
a funkcji arcsin(x) jest przedział [
−1, 1], st ˛ad dziedzin ˛a dys-
kutowanej funkcji trzech zmiennych jest sze´scian [
−1, 1] × [−1, 1] × [−1, 1].
Granica funkcji wielu zmiennych
Przypomnijmy sobie najpierw definicj˛e Cauchy’ego granicy funkcji jednej zmien-
nej
lim
x
→a
f (x) = b
Mieli´smy
∀
ε>0
∃
δ>0
0 <
|x − a| < δ ⇒ |f(x) − b| < ε
Z poprzedniego rozdziału wiemy, ˙ze wielowymiarowym ugólnieniem odległo´sci
|x − y| liczb rzeczywistych jest norma |x − y|, st ˛ad wynika natychmiast definicja
Cachyego granicy w przypadku funkcji wielu zmiennych
lim
x
→a
f (x) = b
Mianowicie definicja ta ma posta´c
∀
ε>0
∃
δ>0
0 <
|x − a| < δ ⇒ |f(x) − b| < ε
Pami˛etamy, ˙ze dla x = (x
1
, . . . , x
k
) i a = (a
1
, . . . , a
k
) mamy
|x − a| =
√
(x
− a)
2
=
√
(x
1
− a
1
)
2
+ . . . + (x
k
− a
k
)
2
Przykład
Niech b˛edzie dana funkcja dwóch zmiennych
f (x, y) =
3x
2
y
x
2
+ y
2
Mamy
lim
(x,y)
→(0,0)
f (x, y) = 0
Rzeczywi´scie, rozpatrzmy definicj˛e Cauchy’ego tej granicy
∀
ε>0
∃
δ>0
0 <
|(x, y)| < δ ⇒ |f(x, y)| < ε
st ˛
ad, wykorzystuj ˛
ac wzór na na norm˛e wektora (x, y)
∀
ε>0
∃
δ>0
0 <
√
x
2
+ y
2
< δ
⇒ |f(x, y)| < ε
Teraz mamy
|f(x, y)| = 3
x
2
x
2
+ y
2
|y| 6 3|y| 6 3
√
x
2
+ y
2
< 3δ
Widzimy, ˙ze δ =
ε
3
. To spostrze˙zenie ko´nczy dowód.
Dysponuj ˛
ac definicj ˛
a granicy mo˙zemy oczywi´scie wprowadzi´c poj˛ecie ci ˛
agło´sci
funkcji wielu zmiennych f (x) w punkcie x
0
, w nast˛epuj ˛
acy sposób
lim
x
→x
0
f (x) = f (x
0
)
albo równowa˙znie
lim
∆x
→0
f (x
0
+ ∆x) = f (x
0
)
Wyszukiwarka
Podobne podstrony:
C 04,5 Rachunek różniczkowy funkcji wielu zmiennych
11 RACHUNEK RÓŻNICZKOWY FUNKCJI WIELU ZMIENNYCH
,analiza matematyczna 1, rachunek różniczkowy funkcji jednej zmiennej
Matematyka III (Ćw) - Lista 05 - Rachunek rózniczkowy funkcji wielu zmiennych, Odpowiedzi
Wykłady z Matematyki, Wykłady - Rachunek Różniczkowy Funkcji Wielu Zmiennych, Dr Adam Ćmiel
Matematyka III (Ćw) - Lista 05 - Rachunek rózniczkowy funkcji wielu zmiennych, Zadania
Matematyka III (Ćw) Lista 05 Rachunek rózniczkowy funkcji wielu zmiennych Odpowiedzi
1-RACHUNEK RÓŻNICZKOWY FUNKCJI WIELU ZMIENNYCH, RACHUNEK RÓŻNICZKOWY FUNKCJI WIELU ZMIENNYCH
2 - Rachunek całkowy funkcji jednej zmiennej. Metody całkowania, Analiza matematyczna
C 04,5 Rachunek różniczkowy funkcji wielu zmiennych
ek mat ii optymalizacja funkcji wielu zmiennych
04 Rozdział 02 Różniczkowanie funkcji wielu zmiennych
analiza matematyczna funkcje wielu zmiennych pwn
Sem 1. Wykład, Rachunek Całkowy Funkcji Jednej Zmiennej cz.2
RACHUNEK CAŁKOWY FUNKCJI JEDNEJ ZMIENNEJ, SZKOŁA, Matematyka, Matematyka
więcej podobnych podstron