Wydawnictwo Helion
ul. Chopina 6
44-100 Gliwice
tel. (32)230-98-63
IDZ DO
IDZ DO
KATALOG KSI¥¯EK
KATALOG KSI¥¯EK
TWÓJ KOSZYK
TWÓJ KOSZYK
CENNIK I INFORMACJE
CENNIK I INFORMACJE
CZYTELNIA
CZYTELNIA
Asembler.
Sztuka programowania
Ksi¹¿ka „Asembler. Sztuka programowania” to podrêcznik programowania w jêzyku
asemblera oparty na jêzyku HLA. Opisuje 32-bitow¹ architekturê procesorów Intel
oraz zasady tworzenia programów w jêzyku HLA. Przedstawia sposoby pisania,
kompilacji i uruchamiania programów wykorzystuj¹cych ró¿ne, nawet najbardziej
z³o¿one typy danych.
• Wprowadzenie do jêzyka HLA
• Sposoby reprezentacji danych
• Organizacja pamiêci i tryby adresowania
• Typy danych
• Podzia³ programu na procedury i modu³y
• Sterowanie wykonaniem programu
• Instrukcje arytmetyczne
• Operacje na plikach
• Operacje bitowe i ³añcuchowe
• Makrodefinicje
• Klasy i obiekty
• Po³¹czenie asemblera z programami w innych jêzykach
Przekonaj siê, jak prosty jest jêzyk asemblera
Autor: Randall Hyde
T³umaczenie: Przemys³aw Szeremiota
ISBN: 83-7361-602-0
Tytu³ orygina³u:
Format: B5, stron: 968

Spis treści
Rozdział 1. Wstęp do języka asemblerowego ...................................................... 13
1.1. Wprowadzenie ........................................................................................................ 13
1.2. Anatomia programu HLA....................................................................................... 13
1.3. Uruchamianie pierwszego programu HLA ............................................................. 16
1.4. Podstawowe deklaracje danych programu HLA..................................................... 17
1.5. Wartości logiczne ................................................................................................... 19
1.6. Wartości znakowe................................................................................................... 20
1.7. Rodzina procesorów 80x86 firmy Intel.................................................................. 21
1.7.1. Podsystem obsługi pamięci........................................................................... 24
1.8. Podstawowe instrukcje maszynowe........................................................................ 26
1.9. Podstawowe struktury sterujące wykonaniem programu HLA............................... 30
1.9.1. Wyrażenia logiczne w instrukcjach HLA ..................................................... 31
1.9.2. Instrukcje if..then..elseif..else..endif języka HLA ......................................... 33
1.9.3. Iloczyn, suma i negacja w wyrażeniach logicznych...................................... 35
1.9.4. Instrukcja while ............................................................................................ 37
1.9.5. Instrukcja for................................................................................................. 38
1.9.6. Instrukcja repeat............................................................................................ 39
1.9.7. Instrukcje break oraz breakif......................................................................... 40
1.9.8. Instrukcja forever.......................................................................................... 40
1.9.9. Instrukcje try, exception oraz endtry............................................................. 41
1.10. Biblioteka standardowa języka HLA — wprowadzenie ......................................... 44
1.10.1. Stałe predefiniowane w module stdio ........................................................... 46
1.10.2. Standardowe wejście i wyjście programu ..................................................... 46
1.10.3. Procedura stdout.newln................................................................................. 47
1.10.4. Procedury stdout.putiN ................................................................................. 47
1.10.5. Procedury stdout.putiNSize .......................................................................... 48
1.10.6. Procedura stdout.put ..................................................................................... 49
1.10.7. Procedura stdin.getc...................................................................................... 51
1.10.8. Procedury stdin.getiN ................................................................................... 52
1.10.9. Procedury stdin.readLn i stdin.flushInput..................................................... 53
1.10.10. Procedura stdin.get ....................................................................................... 54
1.11. Jeszcze o ochronie wykonania kodu w bloku try..endtry........................................ 55
1.11.1. Zagnieżdżone bloki try..endtry ..................................................................... 56
1.11.2. Klauzula unprotected bloku try..endtry......................................................... 58
1.11.3. Klauzula anyexception bloku try..endtry ...................................................... 61
1.11.4. Instrukcja try..endtry i rejestry...................................................................... 61
1.12. Język asemblerowy a język HLA ........................................................................... 63
1.13. Źródła informacji dodatkowych.............................................................................. 64

4
Asembler. Sztuka programowania
Rozdział 2. Reprezentacja danych ...................................................................... 65
2.1. Wprowadzenie ........................................................................................................ 65
2.2. Systemy liczbowe ................................................................................................... 66
2.2.1. System dziesiętny — przypomnienie............................................................ 66
2.2.2. System dwójkowy......................................................................................... 66
2.2.3. Formaty liczb dwójkowych........................................................................... 68
2.3. System szesnastkowy.............................................................................................. 69
2.4. Organizacja danych ................................................................................................ 72
2.4.1. Bity ............................................................................................................... 72
2.4.2. Półbajty......................................................................................................... 73
2.4.3. Bajty ............................................................................................................. 73
2.4.4. Słowa ............................................................................................................ 75
2.4.5. Podwójne słowa ............................................................................................ 76
2.4.6. Słowa poczwórne i długie............................................................................. 77
2.5. Operacje arytmetyczne na liczbach dwójkowych i szesnastkowych....................... 77
2.6. Jeszcze o liczbach i ich reprezentacji...................................................................... 78
2.7. Operacje logiczne na bitach.................................................................................... 81
2.8. Operacje logiczne na liczbach dwójkowych i ciągach bitów.................................. 84
2.9. Liczby ze znakiem i bez znaku ............................................................................... 86
2.10. Rozszerzanie znakiem, rozszerzanie zerem, skracanie, przycinanie....................... 91
2.11. Przesunięcia i obroty .............................................................................................. 95
2.12. Pola bitowe i dane spakowane ................................................................................ 99
2.13. Wprowadzenie do arytmetyki zmiennoprzecinkowej ........................................... 104
2.13.1. Formaty zmiennoprzecinkowe przyjęte przez IEEE ................................... 108
2.13.2. Obsługa liczb zmiennoprzecinkowych w języku HLA ............................... 112
2.14. Reprezentacja liczb BCD ..................................................................................... 115
2.15. Znaki .................................................................................................................... 117
2.15.1. Zestaw znaków ASCII ................................................................................ 117
2.15.2. Obsługa znaków ASCII w języku HLA...................................................... 121
2.16. Zestaw znaków Unicode....................................................................................... 125
2.17. Źródła informacji dodatkowych............................................................................ 126
Rozdział 3. Dostęp do pamięci i jej organizacja ................................................ 127
3.1. Wprowadzenie ...................................................................................................... 127
3.2. Tryby adresowania procesorów 80x86 ................................................................. 127
3.2.1. Adresowanie przez rejestr........................................................................... 128
3.2.2. 32-bitowe tryby adresowania procesora 80x86........................................... 129
3.3. Organizacja pamięci fazy wykonania ................................................................... 135
3.3.1. Obszar kodu................................................................................................ 137
3.3.2. Obszar zmiennych statycznych ................................................................... 139
3.3.3. Obszar niemodyfikowalny .......................................................................... 140
3.3.4. Obszar danych niezainicjalizowanych ........................................................ 141
3.3.5. Atrybut @nostorage.................................................................................... 141
3.3.6. Sekcja deklaracji var ................................................................................... 142
3.3.7. Rozmieszczenie sekcji deklaracji danych w programie HLA ..................... 143
3.4. Przydział pamięci dla zmiennych w programach HLA......................................... 144
3.5. Wyrównanie danych w programach HLA ............................................................ 146
3.6. Wyrażenia adresowe............................................................................................. 149
3.7. Koercja typów ...................................................................................................... 151
3.8. Koercja typu rejestru ............................................................................................ 154
3.9. Pamięć obszaru stosu oraz instrukcje push i pop .................................................. 155
3.9.1. Podstawowa postać instrukcji push............................................................. 155
3.9.2. Podstawowa postać instrukcji pop .............................................................. 157
3.9.3. Zachowywanie wartości rejestrów za pomocą instrukcji push i pop .......... 158

Spis treści
5
3.9.4. Stos jako kolejka LIFO ............................................................................... 159
3.9.5. Pozostałe wersje instrukcji obsługi stosu .................................................... 161
3.9.6. Usuwanie danych ze stosu bez ich zdejmowania ........................................ 163
3.9.7. Odwoływanie się do danych na stosie bez ich zdejmowania ...................... 165
3.10. Dynamiczny przydział pamięci — obszar pamięci sterty ..................................... 166
3.11. Instrukcje inc oraz dec.......................................................................................... 171
3.12. Pobieranie adresu obiektu..................................................................................... 171
3.13. Źródła informacji dodatkowych............................................................................ 172
Rozdział 4. Stałe, zmienne i typy danych .......................................................... 173
4.1. Wprowadzenie ...................................................................................................... 173
4.2. Kilka dodatkowych instrukcji: intmul, bound i into ............................................. 174
4.3. Typ tbyte............................................................................................................... 178
4.4. Deklaracje stałych i zmiennych w języku HLA.................................................... 178
4.4.1. Typy stałych ............................................................................................... 182
4.4.2. Literały stałych łańcuchowych i znakowych............................................... 183
4.4.3. Stałe łańcuchowe i napisowe w sekcji const ............................................... 185
4.4.4. Wyrażenia stałowartościowe....................................................................... 186
4.4.5. Wielokrotne sekcje const i ich kolejność w programach HLA ................... 189
4.4.6. Sekcja val programu HLA .......................................................................... 190
4.4.7. Modyfikowanie obiektów sekcji val w wybranym miejscu
kodu źródłowego programu ....................................................................... 191
4.5. Sekcja type programu HLA .................................................................................. 192
4.6. Typy wyliczeniowe w języku HLA ...................................................................... 193
4.7. Typy wskaźnikowe ............................................................................................... 194
4.7.1. Wskaźniki w języku asemblerowym........................................................... 196
4.7.2. Deklarowanie wskaźników w programach HLA ........................................ 197
4.7.3. Stałe wskaźnikowe i wyrażenia stałych wskaźnikowych............................ 197
4.7.4. Zmienne wskaźnikowe a dynamiczny przydział pamięci ........................... 199
4.7.5. Typowe błędy stosowania wskaźników ...................................................... 200
4.8. Moduł chars.hhf biblioteki standardowej HLA .................................................... 205
4.9. Złożone typy danych ............................................................................................ 207
4.10. Łańcuchy znaków ................................................................................................. 208
4.11. Łańcuchy w języku HLA...................................................................................... 210
4.12. Odwołania do poszczególnych znaków łańcucha ................................................. 217
4.13. Moduł strings biblioteki standardowej HLA i procedury manipulacji łańcuchami ...219
4.14. Konwersje wewnątrzpamięciowe ......................................................................... 231
4.15. Zbiory znaków...................................................................................................... 232
4.16. Implementacja zbiorów znaków w języku HLA................................................... 233
4.17. Literały, stałe i wyrażenia zbiorów znaków w języku HLA ................................. 235
4.18. Operator in w wyrażeniach logicznych
wysokopoziomowego rozszerzenia języka HLA.................................................. 237
4.19. Obsługa zbiorów znaków w bibliotece standardowej HLA .................................. 237
4.20. Wykorzystywanie zbiorów znaków w programach HLA ..................................... 241
4.21. Tablice.................................................................................................................. 243
4.22. Deklarowanie tablic w programach HLA ............................................................. 244
4.23. Literały tablicowe ................................................................................................. 245
4.24. Odwołania do elementów tablicy jednowymiarowej ............................................ 246
4.24.1. Porządkowanie tablicy wartości ................................................................. 248
4.25. Tablice wielowymiarowe ..................................................................................... 250
4.25.1. Wierszowy układ elementów tablicy .......................................................... 251
4.25.2. Kolumnowy układ elementów tablicy ........................................................ 255
4.26. Przydział pamięci dla tablic wielowymiarowych ................................................. 256
4.27. Odwołania do elementów tablic wielowymiarowych w języku asemblerowym... 258

6
Asembler. Sztuka programowania
4.28. Duże tablice i MASM (tylko dla programistów systemu Windows) .................... 259
4.29. Rekordy (struktury) .............................................................................................. 260
4.30. Stałe rekordowe .................................................................................................... 263
4.31. Tablice rekordów.................................................................................................. 264
4.32. Wykorzystanie tablic i rekordów w roli pól rekordów ......................................... 265
4.33. Ingerowanie w przesunięcia pól rekordów ........................................................... 269
4.34. Wyrównanie pól w ramach rekordu...................................................................... 270
4.35. Wskaźniki na rekordy........................................................................................... 271
4.36. Unie ...................................................................................................................... 273
4.37. Unie anonimowe................................................................................................... 275
4.38. Typy wariantowe .................................................................................................. 276
4.39. Stałe unii............................................................................................................... 277
4.40. Przestrzenie nazw ................................................................................................. 278
4.41. Tablice dynamiczne w języku asemblerowym ..................................................... 281
4.42. Obsługa tablic w bibliotece standardowej języka HLA ........................................ 284
4.43. Źródła informacji dodatkowych............................................................................ 287
Rozdział 5. Procedury i moduły ........................................................................ 289
5.1. Wprowadzenie ...................................................................................................... 289
5.2. Procedury.............................................................................................................. 289
5.3. Zachowywanie stanu systemu .............................................................................. 292
5.4. Przedwczesny powrót z procedury ....................................................................... 296
5.5. Zmienne lokalne ................................................................................................... 297
5.6. Symbole lokalne i globalne obiektów innych niż zmienne ................................... 303
5.7. Parametry.............................................................................................................. 304
5.7.1. Przekazywanie przez wartość ..................................................................... 305
5.7.2. Przekazywanie przez adres ......................................................................... 308
5.8. Funkcje i wartości funkcji .................................................................................... 311
5.8.1. Zwracanie wartości funkcji......................................................................... 312
5.8.2. Złożenie instrukcji języka HLA .................................................................. 313
5.8.3. Atrybut @returns procedur języka HLA..................................................... 316
5.9. Rekurencja............................................................................................................ 318
5.10. Deklaracje zapowiadające .................................................................................... 322
5.11. Procedury w ujęciu niskopoziomowym — instrukcja call.................................... 323
5.12. Rola stosu w procedurach..................................................................................... 325
5.13. Rekordy aktywacji................................................................................................ 328
5.14. Standardowa sekwencja wejścia do procedury ..................................................... 331
5.15. Standardowa sekwencja wyjścia z procedury ....................................................... 333
5.16. Niskopoziomowa implementacja zmiennych automatycznych ............................ 334
5.17. Niskopoziomowa implementacja parametrów procedury..................................... 336
5.17.1. Przekazywanie argumentów w rejestrach ................................................... 337
5.17.2. Przekazywanie argumentów w kodzie programu........................................ 340
5.17.3. Przekazywanie argumentów przez stos....................................................... 342
5.18. Wskaźniki na procedury ....................................................................................... 365
5.19. Parametry typu procedurowego ............................................................................ 368
5.20. Nietypowane parametry wskaźnikowe ................................................................. 370
5.21. Zarządzanie dużymi projektami programistycznymi............................................ 371
5.22. Dyrektywa #include ............................................................................................. 372
5.23. Unikanie wielokrotnego włączania do kodu tego samego pliku ........................... 374
5.24. Moduły a atrybut @external................................................................................. 375
5.24.1. Działanie atrybutu @external..................................................................... 380
5.24.2. Pliki nagłówkowe w programach HLA....................................................... 382
5.25. Jeszcze o problemie zaśmiecania przestrzeni nazw .............................................. 384
5.26. Źródła informacji dodatkowych............................................................................ 386

Spis treści
7
Rozdział 6. Arytmetyka.................................................................................... 389
6.1. Wprowadzenie ...................................................................................................... 389
6.2. Zestaw instrukcji arytmetycznych procesora 80x86 ............................................. 389
6.2.1. Instrukcje mul i imul................................................................................... 389
6.2.2. Instrukcje div i idiv ..................................................................................... 393
6.2.3. Instrukcja cmp ............................................................................................ 396
6.2.4. Instrukcje setXX ......................................................................................... 401
6.2.5. Instrukcja test.............................................................................................. 403
6.3. Wyrażenia arytmetyczne ...................................................................................... 404
6.3.1. Proste przypisania ....................................................................................... 405
6.3.2. Proste wyrażenia ......................................................................................... 406
6.3.3. Wyrażenia złożone...................................................................................... 408
6.3.4. Operatory przemienne................................................................................. 413
6.4. Wyrażenia logiczne .............................................................................................. 414
6.5. Idiomy maszynowe a idiomy arytmetyczne.......................................................... 417
6.5.1. Mnożenie bez stosowania instrukcji mul, imul i intmul.............................. 417
6.5.2. Dzielenie bez stosowania instrukcji div i idiv............................................. 419
6.5.3. Zliczanie modulo n za pośrednictwem instrukcji and ................................. 420
6.5.4. Nieostrożne korzystanie z idiomów maszynowych .................................... 420
6.6. Arytmetyka zmiennoprzecinkowa ........................................................................ 421
6.6.1. Rejestry jednostki zmiennoprzecinkowej.................................................... 421
6.6.2. Typy danych jednostki zmiennoprzecinkowej ............................................ 429
6.6.3. Zestaw instrukcji jednostki zmiennoprzecinkowej ..................................... 430
6.6.4. Instrukcje przemieszczania danych............................................................. 431
6.6.5. Instrukcje konwersji.................................................................................... 433
6.6.6. Instrukcje arytmetyczne .............................................................................. 436
6.6.7. Instrukcje porównań ................................................................................... 442
6.6.8. Instrukcje ładowania stałych na stos koprocesora....................................... 445
6.6.9. Instrukcje funkcji przestępnych .................................................................. 445
6.6.10. Pozostałe instrukcje jednostki zmiennoprzecinkowej ................................. 447
6.6.11. Instrukcje operacji całkowitoliczbowych.................................................... 449
6.7. Tłumaczenie wyrażeń arytmetycznych na kod maszynowy
jednostki zmiennoprzecinkowej ........................................................................... 449
6.7.1. Konwersja notacji wrostkowej do odwrotnej notacji polskiej..................... 451
6.7.2. Konwersja odwrotnej notacji polskiej do kodu języka asemblerowego...... 453
6.8. Obsługa arytmetyki zmiennoprzecinkowej w bibliotece standardowej języka HLA.....455
6.8.1. Funkcje stdin.getf i fileio.getf ..................................................................... 455
6.8.2. Funkcje trygonometryczne modułu math.................................................... 455
6.8.3. Funkcje wykładnicze i logarytmiczne modułu math................................... 456
6.9. Podsumowanie...................................................................................................... 458
Rozdział 7. Niskopoziomowe struktury sterujące wykonaniem programu............ 459
7.1. Wprowadzenie ...................................................................................................... 459
7.2. Struktury sterujące niskiego poziomu................................................................... 460
7.3. Etykiety instrukcji................................................................................................. 460
7.4. Bezwarunkowy skok do instrukcji (instrukcja jmp) ............................................. 462
7.5. Instrukcje skoku warunkowego ............................................................................ 465
7.6. Struktury sterujące „średniego” poziomu — jt i jf................................................ 468
7.7. Implementacja popularnych struktur sterujących w języku asemblerowym ......... 469
7.8. Wstęp do podejmowania decyzji .......................................................................... 469
7.8.1. Instrukcje if..then..else ................................................................................ 471
7.8.2. Tłumaczenie instrukcji if języka HLA na język asemblerowy.................... 475
7.8.3. Obliczanie wartości złożonych wyrażeń logicznych
— metoda pełnego szacowania wartości wyrażenia................................... 480
8
Asembler. Sztuka programowania
7.8.4. Skrócone szacowanie wyrażeń logicznych ................................................. 481
7.8.5. Wady i zalety metod szacowania wartości wyrażeń logicznych ................. 483
7.8.6. Efektywna implementacja instrukcji if w języku asemblerowym ............... 485
7.8.7. Instrukcje wyboru ....................................................................................... 490
7.9. Skoki pośrednie a automaty stanów...................................................................... 500
7.10. Kod spaghetti........................................................................................................ 503
7.11. Pętle...................................................................................................................... 504
7.11.1. Pętle while .................................................................................................. 505
7.11.2. Pętle repeat..until ........................................................................................ 506
7.11.3. Pętle nieskończone ..................................................................................... 508
7.11.4. Pętle for ...................................................................................................... 508
7.11.5. Instrukcje break i continue.......................................................................... 509
7.11.6. Pętle a rejestry ............................................................................................ 513
7.12. Optymalizacja kodu.............................................................................................. 514
7.12.1. Obliczanie warunku zakończenia pętli na końcu pętli ................................ 515
7.12.2. Zliczanie licznika pętli wstecz .................................................................... 517
7.12.3. Wstępne obliczanie niezmienników pętli.................................................... 518
7.12.4. Rozciąganie pętli ........................................................................................ 519
7.12.5. Zmienne indukcyjne ................................................................................... 521
7.13. Mieszane struktury sterujące w języku HLA ........................................................ 522
7.14. Źródła informacji dodatkowych............................................................................ 524
Rozdział 8. Pliki .............................................................................................. 525
8.1. Wprowadzenie ...................................................................................................... 525
8.2. Organizacja plików............................................................................................... 525
8.2.1. Pliki jako listy rekordów............................................................................. 526
8.2.2. Pliki tekstowe a pliki binarne...................................................................... 528
8.3. Pliki sekwencyjne ................................................................................................. 530
8.4. Pliki dostępu swobodnego .................................................................................... 538
8.5. Indeksowany sekwencyjny dostęp do pliku (ISAM) ............................................ 543
8.6. Przycinanie pliku .................................................................................................. 546
8.7. Źródła informacji dodatkowych............................................................................ 548
Rozdział 9. Zaawansowane obliczenia w języku asemblerowym......................... 549
9.1. Wprowadzenie ...................................................................................................... 549
9.2. Operacje o zwielokrotnionej precyzji ................................................................... 550
9.2.1. Obsługa operacji zwielokrotnionej precyzji
w bibliotece standardowej języka HLA...................................................... 550
9.2.2. Dodawanie liczb zwielokrotnionej precyzji ................................................ 553
9.2.3. Odejmowanie liczb zwielokrotnionej precyzji............................................ 556
9.2.4. Porównanie wartości o zwielokrotnionej precyzji ...................................... 558
9.2.5. Mnożenie operandów zwielokrotnionej precyzji ........................................ 562
9.2.6. Dzielenie wartości zwielokrotnionej precyzji ............................................. 565
9.2.7. Negacja operandów zwielokrotnionej precyzji ........................................... 575
9.2.8. Iloczyn logiczny operandów zwielokrotnionej precyzji.............................. 577
9.2.9. Suma logiczna operandów zwielokrotnionej precyzji................................. 577
9.2.10. Suma wyłączająca operandów zwielokrotnionej precyzji........................... 578
9.2.11. Inwersja operandów zwielokrotnionej precyzji .......................................... 578
9.2.12. Przesunięcia bitowe operandów zwielokrotnionej precyzji ........................ 578
9.2.13. Obroty operandów zwielokrotnionej precyzji............................................. 583
9.2.14. Operandy zwielokrotnionej precyzji w operacjach wejścia-wyjścia........... 583
9.3. Manipulowanie operandami różnych rozmiarów.................................................. 604
9.4. Arytmetyka liczb dziesiętnych.............................................................................. 606
9.4.1. Literały liczb BCD...................................................................................... 608
9.4.2. Instrukcje maszynowe daa i das.................................................................. 608

Spis treści
9
9.4.3. Instrukcje maszynowe aaa, aas, aam i aad .................................................. 610
9.4.4. Koprocesor a arytmetyka spakowanych liczb dziesiętnych ........................ 612
9.5. Obliczenia w tabelach........................................................................................... 615
9.5.1. Wyszukiwanie w tabeli wartości funkcji .................................................... 615
9.5.2. Dopasowywanie dziedziny ......................................................................... 620
9.5.3. Generowanie tabel wartości funkcji............................................................ 621
9.5.4. Wydajność odwołań do tabel przeglądowych ............................................. 625
9.6. Źródła informacji dodatkowych............................................................................ 625
Rozdział 10. Makrodefinicje i język czasu kompilacji .......................................... 627
10.1. Wprowadzenie...................................................................................................... 627
10.2. Język czasu kompilacji — wstęp .......................................................................... 627
10.3. Instrukcje #print i #error....................................................................................... 629
10.4. Stałe i zmienne czasu kompilacji.......................................................................... 631
10.5. Wyrażenia i operatory czasu kompilacji............................................................... 632
10.6. Funkcje czasu kompilacji ..................................................................................... 635
10.6.1. Funkcje czasu kompilacji — konwersja typów........................................... 636
10.6.2. Funkcje czasu kompilacji — obliczenia numeryczne ................................. 638
10.6.3. Funkcje czasu kompilacji — klasyfikacja znaków ..................................... 638
10.6.4. Funkcje czasu kompilacji — manipulacje łańcuchami znaków .................. 639
10.6.5. Funkcje czasu kompilacji — dopasowywanie wzorców............................. 639
10.6.6. Odwołania do tablicy symboli .................................................................... 641
10.6.7. Pozostałe funkcje czasu kompilacji ............................................................ 643
10.6.8. Konwersja typu stałych napisowych........................................................... 643
10.7. Kompilacja warunkowa ........................................................................................ 645
10.8. Kompilacja wielokrotna (pętle czasu kompilacji)................................................. 650
10.9. Makrodefinicje (procedury czasu kompilacji) ...................................................... 653
10.9.1. Makrodefinicje standardowe....................................................................... 654
10.9.2. Argumenty makrodefinicji.......................................................................... 656
10.9.3. Symbole lokalne makrodefinicji ................................................................. 663
10.9.4. Makrodefinicje jako procedury czasu kompilacji ....................................... 666
10.9.5. Symulowane przeciążanie funkcji .............................................................. 667
10.10. Tworzenie programów czasu kompilacji .............................................................. 672
10.10.1. Generowanie tabel wartości funkcji............................................................ 673
10.10.2. Rozciąganie pętli ........................................................................................ 677
10.11. Stosowanie makrodefinicji w osobnych plikach kodu źródłowego ...................... 679
10.12. Źródła informacji dodatkowych ........................................................................... 679
Rozdział 11. Manipulowanie bitami .................................................................... 681
11.1. Wprowadzenie...................................................................................................... 681
11.2. Czym są dane bitowe? .......................................................................................... 681
11.3. Instrukcje manipulujące bitami............................................................................. 683
11.4. Znacznik przeniesienia w roli akumulatora bitów ................................................ 692
11.5. Wstawianie i wyodrębnianie łańcuchów bitów .................................................... 693
11.6. Scalanie zbiorów bitów i rozpraszanie łańcuchów bitowych................................ 696
11.7. Spakowane tablice łańcuchów bitowych .............................................................. 699
11.8. Wyszukiwanie bitów ............................................................................................ 701
11.9. Zliczanie bitów ..................................................................................................... 704
11.10. Odwracanie łańcucha bitów.................................................................................. 707
11.11. Scalanie łańcuchów bitowych .............................................................................. 709
11.12. Wyodrębnianie łańcuchów bitów ......................................................................... 710
11.13. Wyszukiwanie wzorca bitowego .......................................................................... 712
11.14. Moduł bits biblioteki standardowej HLA ............................................................. 713
11.15. Źródła informacji dodatkowych ........................................................................... 715

10
Asembler. Sztuka programowania
Rozdział 12. Operacje łańcuchowe ..................................................................... 717
12.1. Wprowadzenie...................................................................................................... 717
12.2. Instrukcje łańcuchowe procesorów 80x86............................................................ 717
12.2.1. Sposób działania instrukcji łańcuchowych ................................................. 718
12.2.2. Przedrostki instrukcji łańcuchowych — repX ............................................ 719
12.2.3. Znacznik kierunku ...................................................................................... 719
12.2.4. Instrukcja movs........................................................................................... 721
12.2.5. Instrukcja cmps........................................................................................... 727
12.2.6. Instrukcja scas............................................................................................. 731
12.2.7. Instrukcja stos ............................................................................................. 732
12.2.8. Instrukcja lods ............................................................................................ 733
12.2.9. Instrukcje lods i stos w złożonych operacjach łańcuchowych .................... 733
12.3. Wydajność instrukcji łańcuchowych procesorów 80x86 ...................................... 734
12.4. Źródła informacji dodatkowych............................................................................ 735
Rozdział 13. Instrukcje MMX............................................................................. 737
13.1. Wprowadzenie...................................................................................................... 737
13.2. Sprawdzanie obecności rozszerzenia MMX ......................................................... 738
13.3. Środowisko programowania MMX ...................................................................... 739
13.3.1. Rejestry MMX............................................................................................ 739
13.3.2. Typy danych MMX .................................................................................... 741
13.4. Przeznaczenie instrukcji zestawu MMX............................................................... 742
13.5. Arytmetyka z nasycaniem a arytmetyka z zawijaniem ......................................... 743
13.6. Operandy instrukcji MMX ................................................................................... 744
13.7. Instrukcje zestawu MMX ..................................................................................... 746
13.7.1. Instrukcje transferu danych......................................................................... 747
13.7.2. Instrukcje konwersji.................................................................................... 747
13.7.3. Arytmetyka operandów spakowanych ........................................................ 752
13.7.4. Instrukcje logiczne...................................................................................... 755
13.7.5. Instrukcje porównań ................................................................................... 756
13.7.6. Instrukcje przesunięć bitowych................................................................... 760
13.7.7. Instrukcja emms.......................................................................................... 762
13.8. Model programowania MMX............................................................................... 763
13.9. Źródła informacji dodatkowych............................................................................ 774
Rozdział 14. Klasy i obiekty............................................................................... 775
14.1. Wprowadzenie...................................................................................................... 775
14.2. Wstęp do programowania obiektowego................................................................ 775
14.3. Klasy w języku HLA ............................................................................................ 779
14.4. Obiekty ................................................................................................................. 782
14.5. Dziedziczenie ....................................................................................................... 784
14.6. Przesłanianie......................................................................................................... 785
14.7. Metody wirtualne a procedury statyczne .............................................................. 786
14.8. Implementacje metod i procedur klas ................................................................... 788
14.9. Implementacja obiektu ......................................................................................... 793
14.9.1. Tabela metod wirtualnych .......................................................................... 796
14.9.2. Reprezentacja w pamięci obiektu klasy pochodnej..................................... 798
14.10. Konstruktory i inicjalizacja obiektów................................................................... 802
14.10.1. Konstruktor a dynamiczny przydział obiektu ............................................. 804
14.10.2. Konstruktory a dziedziczenie...................................................................... 806
14.10.3. Parametry konstruktorów i przeciążanie procedur klas .............................. 810
14.11. Destruktory........................................................................................................... 811
14.12. Łańcuchy _initialize_ oraz _finalize_ w języku HLA .......................................... 812
14.13. Metody abstrakcyjne ............................................................................................ 818

Spis treści
11
14.14. Informacja o typie czasu wykonania (RTTI) ........................................................ 822
14.15. Wywołania metod klasy bazowej ......................................................................... 824
14.16. Źródła informacji dodatkowych ........................................................................... 825
Rozdział 15. Na styku asemblera i innych języków programowania...................... 827
15.1. Wprowadzenie...................................................................................................... 827
15.2. Łączenie kodu HLA i kodu asemblera MASM bądź Gas ..................................... 827
15.2.1. Kod asemblera MASM (Gas) rozwijany w kodzie języka HLA ................. 828
15.2.2. Konsolidacja modułów MASM (Gas) z modułami HLA............................ 832
15.3. Moduły HLA a programy języka Delphi (Kylix) ................................................. 837
15.3.1. Konsolidacja modułów HLA z programami języka Delphi (Kylix) ........... 838
15.3.2. Zachowywanie wartości rejestrów.............................................................. 842
15.3.3. Wartości zwracane funkcji.......................................................................... 843
15.3.4. Konwencje wywołań .................................................................................. 849
15.3.5. Przekazywanie argumentów przez wartość i adres,
parametry niemodyfikowalne i wyjściowe ................................................. 854
15.3.6. Skalarne typy danych w językach HLA i Delphi (Kylix) ........................... 856
15.3.7. Przekazywanie łańcuchów znaków z Delphi do procedury HLA ............... 858
15.3.8. Przekazywanie rekordów z programu w języku Delphi do kodu HLA....... 862
15.3.9. Przekazywanie zbiorów z programu w języku Delphi do kodu HLA ......... 866
15.3.10. Przekazywanie tablic z programu w języku Delphi do kodu HLA ............. 867
15.3.11. Odwołania do obiektów programu pisanego w Delphi w kodzie HLA....... 867
15.4. Moduły HLA a programy języków C i C++ ......................................................... 870
15.4.1. Konsolidacja modułów języka HLA z programami języków C i C++........ 872
15.4.2. Zachowywanie wartości rejestrów.............................................................. 875
15.4.3. Wartości funkcji ......................................................................................... 876
15.4.4. Konwencje wywołań .................................................................................. 876
15.4.5. Tryby przekazywania argumentów ............................................................. 880
15.4.6. Odwzorowanie typów skalarnych
pomiędzy językiem C (C++) a językiem HLA ........................................... 881
15.4.7. Przekazywanie łańcuchów znaków
pomiędzy programem w języku C (C++) a modułem HLA........................ 883
15.4.8. Przekazywanie rekordów
pomiędzy programem w języku C (C++) a modułem HLA........................ 883
15.4.9. Przekazywanie tablic
pomiędzy programem w języku C (C++) a modułem HLA........................ 886
15.5. Źródła informacji dodatkowych............................................................................ 886
Dodatek A Tabela kodów ASCII....................................................................... 887
Dodatek B Instrukcje procesorów 80x86......................................................... 891
Skorowidz...................................................................................... 927

1.9. Podstawowe struktury sterujące
wykonaniem programu HLA
Instrukcje
,
oraz
, choć niezwykle użyteczne, nie wystarczają do napisania
sensownych programów. Aby takie programy mogły powstać, podstawowe instrukcje
muszą zostać uzupełnione o podstawowy zbiór struktur sterujących wykonaniem kodu
umożliwiających tworzenie pętli i podejmowanie decyzji w programie. Język HLA
przewiduje szereg wysokopoziomowych struktur sterujących wykonaniem charaktery-
stycznych dla języków wyższego niż asembler poziomu. Programista HLA ma więc do
dyspozycji konstrukcje
,
,
i tak dalej. Dopiero znajomość i umiejętność wykorzystywania owych konstrukcji
pozwala na stworzenie prawdziwego programu.
Przed zagłębieniem się w cechach struktur sterujących należałoby podkreślić, że nie mają
one odpowiedników w zestawie instrukcji maszynowych procesorów 80x86. Kompi-
lator HLA tłumaczy owe struktury do postaci szeregu prawdziwych instrukcji maszyno-
wych za programistę. Sposób, w jaki to czyni, opisany zostanie w dalszej części książki;
wtedy też Czytelnik nauczy się pisać kod w czystym języku asemblerowym, bez wy-
korzystania wysokopoziomowych cech kompilatora HLA. Na razie jednak, z racji
niewielkiego jeszcze zasobu wiedzy o języku asemblerowym, nieco sztuczne struktury
sterujące HLA będą bardzo pomocne.
Warto przy tym pamiętać, że wysokopoziomowe na pierwszy rzut oka struktury sterujące
nie są w istocie tak wysokopoziomowe. Mają one bowiem jedynie ułatwić rozpoczęcie
pisania programów w języku asemblerowym — w żadnym razie nie zastępują asem-
blerowych instrukcji sterujących wykonaniem kodu. Już wkrótce okaże się więc, że owe
wysokopoziomowe struktury sterujące mają szereg ograniczeń, które w miarę nabie-
rania przez Czytelnika doświadczenia i w miarę komplikowania kolejnych programów
staną się dość uciążliwe. To zresztą efekt zamierzony — po osiągnięciu pewnego poziomu
umiejętności programista sam stwierdzi, że w wielu przypadkach wygoda (i czytelność
programu) wynikająca z zastosowania struktur sterujących HLA nie rekompensuje
utraty efektywności, charakterystycznej dla kodu wykorzystującego wprost instrukcje
maszynowe procesora.
Niniejsze omówienie kierowane jest do tych Czytelników, którzy znają już przynajmniej
jeden z popularnych języków wysokiego poziomu. Znajomość ta znakomicie uprości
prezentację struktur sterujących wykonaniem programu HLA, pozwalając na pominięcie
opisów sposobów zastosowania owych struktur w typowych zadaniach programistycz-
nych. Czytelnicy potrafiący korzystać ze struktur sterujących wykonaniem programu
w dowolnym z języków wysokiego poziomu nie powinni być zaskoczeni, kiedy odkryją,
że analogiczne struktury wykorzystywane są w programach HLA w sposób dosłownie
identyczny.

Rozdział 1.
♦ Wstęp do języka asemblerowego
31
1.9.1. Wyrażenia logiczne w instrukcjach HLA
Niektóre z instrukcji sterujących wykonaniem programu HLA wymagają określenia
w miejsce operandu wartości logicznej („prawda” bądź „fałsz”); ścieżka wykonania pro-
gramu zależy wtedy od wartości wyrażenia logicznego. Przykładami struktur wyma-
gających określenia wyrażenia logicznego są instrukcje
,
oraz
.
Pierwszą oznaką ograniczeń struktur sterujących wykonaniem programu HLA jest
składnia owych wyrażeń. W tym jednym miejscu nawyki wyniesione z języków wyso-
kiego poziomu zwracają się przeciwko programiście asemblera: w języku HLA wyra-
żenia logiczne są bardzo ograniczone — nie sposób konstruować tu wyrażeń równie
wymyślnych, z jakimi może mieć do czynienia programista języka C++.
Wyrażenia logiczne w języku HLA mogą przyjąć jedną z następujących postaci
1
:
Znacznik może zostać określony za pośrednictwem jednego z symboli wyliczonych
w tabeli 1.2.
Tabela 1.2. Symbole reprezentujące znaczniki
Symbol
Znacznik
Znaczenie
Przeniesienie
„Prawda” dla ustawionego (1) znacznika przeniesienia;
„fałsz” dla wyzerowanego (0) znacznika przeniesienia.
Brak przeniesienia
„Prawda” dla wyzerowanego (0) znacznika przeniesienia;
„fałsz” dla ustawionego (1) znacznika przeniesienia.
Zero
„Prawda” dla ustawionego (1) znacznika zera; „fałsz”
dla wyzerowanego (0) znacznika zera.
Brak zera
„Prawda” dla wyzerowanego (0) znacznika zera; „fałsz”
dla ustawionego (1) znacznika zera.
Przepełnienie
„Prawda” dla ustawionego (1) znacznika przepełnienia;
„fałsz” dla wyzerowanego (0) znacznika przepełnienia.
Brak przepełnienia
„Prawda” dla wyzerowanego (0) znacznika przepełnienia;
„fałsz” dla ustawionego (1) znacznika przepełnienia.
Znak
„Prawda” dla ustawionego (1) znacznika znaku; „fałsz”
dla wyzerowanego (0) znacznika znaku.
Brak znaku
„Prawda” dla wyzerowanego (0) znacznika znaku; „fałsz”
dla ustawionego (1) znacznika znaku.
1
Istnieje jeszcze kilka postaci dodatkowych; zostaną one omówione w dalszych podrozdziałach
i rozdziałach.
32
Asembler. Sztuka programowania
Wykorzystanie tych znaczników w wyrażeniach logicznych to już dość zaawansowane
programowanie w asemblerze. Sposób konstruowania wyrażeń logicznych angażujących
znaczniki słowa stanu procesora zaprezentowany zostanie w następnym rozdziale.
W przypadku, kiedy wartość logiczna angażuje operand rejestrowy, operand ten może
odnosić się do zarówno do rejestru 8-bitowego, 16-bitowego, jak i 32-bitowego. Wyra-
żenie takie przyjmuje wartość „fałsz”, jeśli rejestr zawiera wartość zero. Dla każdej innej
wartości rejestru wyrażenie logiczne przyjmuje wartość „prawda”.
Jeśli w wyrażeniu logicznym uwikłana jest zmienna przechowywana w pamięci, jej war-
tość jest sprawdzana, a wyrażenie przyjmuje wartość logiczną „prawdy” bądź „fałszu”
w zależności od tej wartości, według reguł identycznych jak dla rejestrów. Należy
jednak pamiętać, że w wyrażeniu logicznym powinna występować zmienna typu logicz-
nego (
). Uwikłanie w wyrażeniu logicznym zmiennej innego typu spowoduje
błąd. W przypadku potrzeby określenia wartości logicznej zmiennej typu innego niż
należy skorzystać z wyrażeń logicznych ogólnego przeznaczenia, omówio-
nych poniżej.
Najbardziej ogólna postać wyrażenia logicznego w języku HLA pozwala na określenie
operatora relacji wraz z dwoma operandami. Listę dozwolonych kombinacji rodzajów
operandów i operatorów relacji zawiera tabela 1.3.
Tabela 1.3. Dozwolone wyrażenia logiczne
Operand lewy
Operator relacji
Operand prawy
Zmienna w pamięci bądź rejestr
albo
Zmienna w pamięci, rejestr bądź stała
albo
Nie można określić obu operandów jako operandów pamięciowych. Lewy operand moż-
na więc utożsamić z operandem źródłowym, a operand prawy z operandem docelowym
i stosować kombinacje rodzajów operandów takie jak dla instrukcji
czy
.
Kolejna analogia operatorów relacji do instrukcji
i
objawia się w wymogu
identycznego rozmiaru operandów. I tak, oba operandy muszą być albo bajtami, albo
słowami, albo podwójnymi słowami. Jeśli operand prawy jest stałą, jego wartość musi
nadawać się do zapisania w operandzie lewym.
I jeszcze jedno: jeśli lewy operand jest rejestrem, a prawy to stała dodatnia albo inny
rejestr, porównanie odbywa się bez uwzględnienia znaku operandów. Efekty takiego
porównania omówione zostaną w następnym rozdziale; na razie wystarczy zapamiętać,
że nie powinno się porównywać wartości ujemnej przechowywanej w rejestrze z warto-
ścią stałą albo zawartością innego rejestru. Wynik porównania może bowiem odbiegać
od oczekiwań programisty.
Rozdział 1.
♦ Wstęp do języka asemblerowego
33
Operatory
i
pozwalają na wykonanie testu zawierania się wartości prze-
chowywanej w rejestrze w określonym zbiorze liczb. Na przykład wyrażenie
daje wartość logiczną
, jeśli wartość przechowywana w rejestrze
EAX to wartość z zakresu od 2000 do 2099 (włącznie). Operator
ma działanie
odwrotne — da wartość logiczną
jedynie wtedy, kiedy zawartość rejestru to
liczba spoza określonego zbioru. Na przykład wyrażenie
będzie
miało wartość
tylko wtedy, kiedy znak przechowywany w rejestrze AL nie będzie
małą literą alfabetu.
Oto kilka przykładów wyrażeń logicznych w języku HLA:
!""
#$$$$
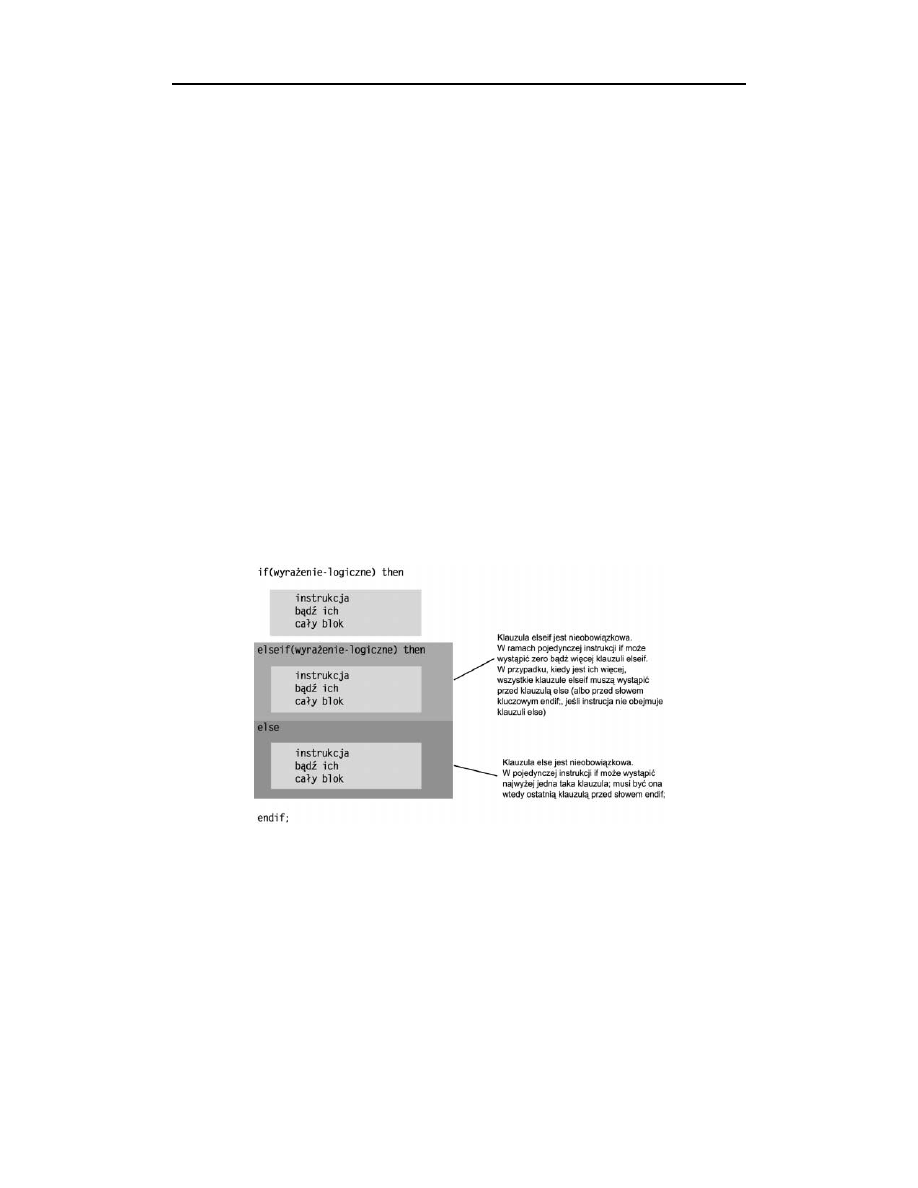
1.9.2. Instrukcje if..then..elseif..else..endif języka HLA
Składnia instrukcji warunkowego wykonania kodu
w wydaniu języka HLA prezen-
towana jest na rysunku 1.10.
Rysunek 1.10. Składnia instrukcji if w języku HLA
Wyrażenia występujące w instrukcji
muszą odpowiadać jednej z postaci wyrażeń lo-
gicznych, zaprezentowanych w poprzednim ustępie. Jeśli wyrażenie przyjmie wartość lo-
giczną „prawda”, wykonany zostanie kod umieszczony za klauzulą
. W przeciwnym
przypadku sterowanie przekazane zostanie do kodu w ramach klauzuli
bądź
.

34
Asembler. Sztuka programowania
Ponieważ klauzule
i
nie są obowiązkowe, instrukcja
w najprostszej
postaci składa się z wyrażenia logicznego i pojedynczej klauzuli
, za którą wystę-
puje instrukcja lub blok instrukcji wykonywanych warunkowo, w zależności od war-
tości wyrażenia logicznego:
%& !"'#
()*)&+,(-./011+2'3
(%3
Jeśli w trakcie wykonania programu wyrażenie logiczne w instrukcji
będzie miało
wartość
, wykonany zostanie kod znajdujący się pomiędzy słowami
i
.
W przypadku kiedy wyrażenie logiczne będzie miało wartość
, kod ów zostanie
pominięty.
Inną powszechnie występującą formą instrukcji
jest forma z pojedynczą klauzulą
. Instrukcja taka wygląda następująco:
%& !"'#
()*)&+,(-./011.44+2'3
()*)&+5*...44+2'3
(%3
Jeśli wyrażenie logiczne przyjmie wartość
, wykonany zostanie kod zawarty między
słowami
a
. W przypadku wartości
sterowanie przekazane zostanie do
kodu ograniczonego klauzulą
i słowem
.
Przez osadzanie opcjonalnych klauzul
w instrukcji
można rozbudowywać
podejmowanie decyzji o wykonaniu kodu. Na przykład, jeśli rejestr CH zawiera wartość
znakową, można na podstawie jego wartości dokonać wyboru spośród dostępnych
opcji menu, konstruując następującą instrukcję
:
%&#$$'#
()*)&+67,*78 9 )-$$+2'3
%&#$,$'#
()*)&+67,*78 9 )-$,$+2'3
%&#$$'
()*)&+67,*78 9 )-$$+2'3
()*)&+(-.7,*8*9 )+2'3
(%3

Rozdział 1.
♦ Wstęp do języka asemblerowego
35
Choć nie widać tego w powyższym przykładzie, język HLA nie wymaga umieszczania
po sekwencji klauzul
klauzuli
. Jednak przy podejmowaniu decyzji o wyko-
naniu jednej z wielu ścieżek kodu warto uzupełnić instrukcję
klauzulą
rozpo-
czynającą ścieżkę kodu obsługi ewentualnych błędów wyboru. Nawet jeśli pozornie
wykonanie owego kodu wydaje się niemożliwe, to należy wziąć pod uwagę ewentualny
rozwój aplikacji — w kolejnych wersjach kodu wybór ścieżki wykonania może mieć
inny przebieg; warto, aby wtedy kod decyzyjny uzupełniony został o obsługę sytuacji
wyjątkowych i niespodziewanych.
1.9.3. Iloczyn, suma i negacja
w wyrażeniach logicznych
Na liście operatorów zaprezentowanej w poprzednich punktach zabrakło bardzo ważnych
operatorów logicznych: operatora iloczynu logicznego (AND), logicznej sumy (OR)
oraz logicznej negacji (NOT). Ich zastosowanie w wyrażeniach logicznych omówione
zostanie tutaj — wcześniej omówienie takie nie miałoby racji bytu z uwagi na koniecz-
ność poprzedzenia go omówieniem instrukcji warunkowego wykonania kodu
. Bez
możliwości wybiórczego wykonywania kodu trudno zaprezentować realistyczne przy-
kłady zastosowania operatorów logicznych.
W języku HLA operator iloczynu logicznego ma postać znaków
. Jest to operator
binarny i jako taki wymaga określenia dwóch operandów; operandy te muszą być po-
prawnymi wyrażeniami czasu wykonania. Operator ten zwraca wartość logiczną „prawda”
wtedy, kiedy oba operandy mają wartość „prawda”. Oto przykład:
%& !"::#$$'#
9& !2 ,!'3
9&$$2#'3
(%3
Obie instrukcje
zostaną wykonane jedynie wtedy, kiedy równocześnie rejestr EAX
będzie miał wartość większą od 0, a rejestr CH będzie zawierał znak „a”. Jeśli który-
kolwiek z tych warunków nie będzie spełniony, obie instrukcje
zostaną pominięte.
Warto pamiętać, że operandy operatora
mogą być dowolnymi poprawnymi wyra-
żeniami logicznymi języka HLA — nie muszą to być wyłącznie operatory relacji. Oto
kilka poprawnych logicznych z operatorem iloczynu logicznego:
::"
$$$$:: ,!
,;:: !
W języku HLA wykorzystywana jest metoda skróconego szacowania wartości wyrażeń
operandów operatora logicznego
. Otóż jeśli lewy operand ma wartość „fałsz”, to
operand prawy nie jest już sprawdzany — wyrażenie logiczne natychmiast otrzymuje
wartość „fałsz” (co jest jak najbardziej poprawne, bo operator
daje wartość „prawda”
wyłącznie dla dwu operandów o wartości „prawda”). Stąd w ostatnim z zaprezentowanych
wyżej wyrażeń najpierw sprawdzona zostanie wartość logiczna zmiennej
; jeśli
będzie to wartość
, test wartości logicznej rejestru EAX zostanie pominięty.

36
Asembler. Sztuka programowania
Nie sposób nie zauważyć, że wyrażenie z operatorem
, np.
,
jest wyrażeniem logicznym (zwraca albo wartość logiczną „prawda”, albo wartość
„fałsz”), więc wyrażenie takie może występować w roli operandu innego wyrażenia
z operatorem logicznym. Stąd poprawność następującego wyrażenia:
!":: ,! !:: !
Operator iloczynu logicznego cechuje się łącznością lewostronną, co oznacza, że w kodzie
wygenerowanym przez kompilator HLA ewaluacja (wartościowanie) wyrażenia następuje
od strony lewej do prawej. Jeśli rejestr EAX zawiera wartość większą od zera, pozostałe
operandy nie będą sprawdzane. Analogicznie, jeśli EAX jest mniejszy od zera, ale EBX
jest równy EAX, to sprawdzanie logicznej wartości wyrażenia
!
zostanie pominięte —
całe wyrażenie od razu otrzyma wartość
.
Operator sumy logicznej w języku HLA reprezentowany jest znakami
""
. Podobnie, jak
operator iloczynu, operator sumy logicznej wymaga określenia dwóch operandów będą-
cych poprawnymi wyrażeniami logicznymi. Operator zwraca przy tym wartość logiczną
„prawda”, jeśli którykolwiek z operandów ma wartość logiczną „prawda”. Również
podobnie jak w przypadku operatora iloczynu stosowana jest metoda skróconej ewalu-
acji wyrażenia — jeśli już pierwszy operand ma wartość logiczną „prawda”, operator
natychmiast zwraca wartość „prawda”, niezależnie od wartości drugiego operandu. Oto
przykłady zastosowania operatora sumy logicznej:
<<"
$$$$<< ,!
,;<< !
Podobnie jak operator
operator logicznej sumy cechuje się łącznością lewostronną,
więc w wyrażeniach z wieloma operatorami
""
ewaluacja przebiega od strony lewej do
prawej. Na przykład:
!"<< ,! !<< !
Jeśli powyższe wyrażenie zostałoby osadzone w wyrażeniu logicznym instrukcji
, to
kod po klauzuli
zostałby wykonany tylko wtedy, kiedy rejestr EAX miałby wartość
mniejszą od zera lub EBX nie byłby równy EAX bądź rejestr ECX zawierałby wartość
zero. Jeśli już pierwszy test dałby wartość
, pozostałe warunki nie byłyby spraw-
dzane. Gdyby pierwszy warunek miał wartość
, ale drugi
, to etap szacowania
wartości logicznej wyrażenia
!
zostałby pominięty. Test zawartości rejestru ECX
nastąpiłby jedynie w obliczu niespełnienie wcześniejszych dwóch wyrażeń.
Jeśli w jednym wyrażeniu logicznym występują operatory iloczynu i sumy logicznej,
pierwszeństwo przed operatorem sumy ma operator iloczynu. Weźmy następujące wy-
rażenie:
!"<< ,! !:: !
W interpretacji HLA powyższemu wyrażeniu równoważne jest wyrażenie następujące:
!"<<& ,! !:: !'
Jeśli rejestr EAX będzie miał wartość mniejszą od zera, reszta wyrażenia nie będzie
sprawdzana — całość wyrażenia otrzyma wartość
. Jeśli jednak rejestr EAX będzie
Rozdział 1.
♦ Wstęp do języka asemblerowego
37
zawierał wartość większą od zera, to aby całość wyrażenia otrzymała wartość
,
oba operandy operatora iloczynu musiałyby mieć wartość
.
Podwyrażenia wykorzystujące operatory iloczynu i sumy logicznej można grupować
wedle własnego uznania, otaczając je nawiasami. Oto przykładowe wyrażenie:
& !"<< ,! !':: !
Aby to wyrażenie otrzymało wartość logiczną „prawda”, rejestr ECX musi zawierać
wartość zero oraz albo wartość EAX musi być mniejsza od zera, albo rejestr EBX musi
zawierać wartość różną od rejestru EAX. Szacowanie wyrażenia przebiega więc od-
miennie niż w wersji bez nawiasów.
Operator negacji logicznej ma w języku HLA postać znaku wykrzyknika (
). Operan-
dami operatora negacji mogą być jednak wyłącznie rejestry i zmienne w pamięci (np.
) — operator negacji nie może być bezpośrednio aplikowany do złożonych
wyrażeń logicznych. Aby wykonać logiczną negację wyrażenia logicznego, należy to
wyrażenie ująć w nawiasy i cały nawias opatrzyć przedrostkiem w postaci wykrzyknika:
& !"'
Powyższe wyrażenie otrzymuje wartość
wtedy, kiedy rejestr EAX ma wartość
mniejszą od zera.
Operator logicznej negacji jest szczególnie użyteczny w odniesieniu do wyrażeń zło-
żonych angażujących operatory logicznej sumy i logicznego iloczynu. W prostych wyra-
żeniach, jak powyższe, lepiej jest zazwyczaj bezpośrednio określić stan logiczny wyra-
żenia niż dodatkowo komplikować go operatorem negacji.
W języku HLA programista może też korzystać z operatorów bitowych
"
i
, ale te różnią
się znacząco od operatorów logicznych
""
oraz
. Szczegółowe omówienie operatorów
bitowych i innych operatorów języka HLA znajduje się w dokumentacji kompilatora.
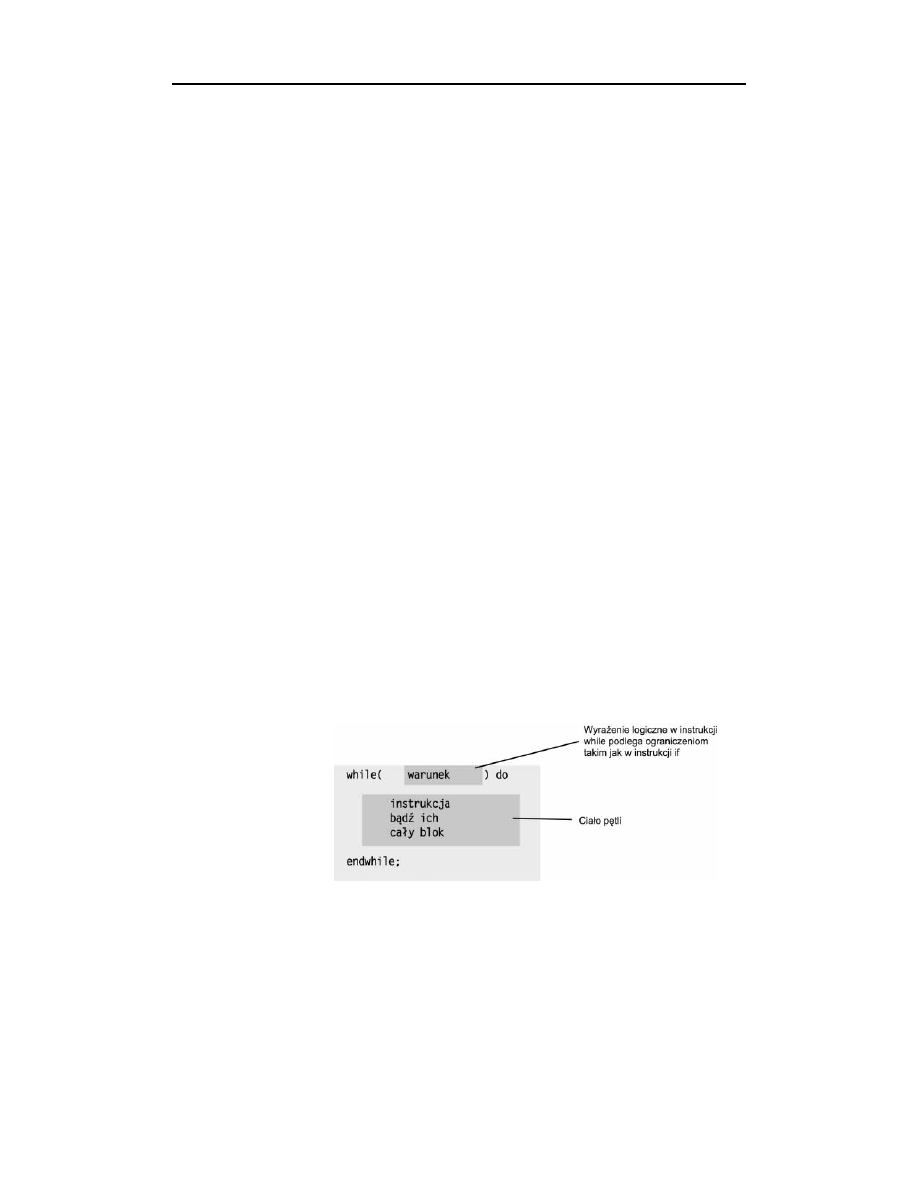
1.9.4. Instrukcja while
Składnię instrukcji
ilustruje rysunek 1.11.
Rysunek 1.11.
Składnia instrukcji
while języka HLA
Wykonanie instrukcji
przebiega następująco: najpierw szacowana jest wartość
logiczna wyrażenia warunku pętli. Jeśli ma ono wartość „fałsz”, sterowanie natych-
miast przekazywane jest do kodu znajdującego się za klauzulą
. W przypadku

38
Asembler. Sztuka programowania
wartości „prawda” wyrażenia warunku, procesor przystępuje do wykonania ciała pętli.
Po wykonaniu wszystkich instrukcji ciała pętli następuje ponowne oszacowanie wartości
logicznej wyrażenia warunkowego. Cała procedura powtarzana jest aż do momentu,
w którym wyrażenie warunkowe pętli przyjmie wartość logiczną „fałsz”.
W pętli
sprawdzenie wartości warunku wykonania pętli następuje podobnie jak
w językach wysokiego poziomu, czyli przed wykonaniem pierwszej instrukcji ciała
pętli. Z tego względu istnieje prawdopodobieństwo, że instrukcje ciała pętli nie zostaną
wykonane ani razu, jeśli wyrażenie warunku będzie od początku miało wartość
.
Poza tym warto pamiętać, że przynajmniej jedna z instrukcji ciała pętli powinna mody-
fikować wartość wyrażenia logicznego — w przeciwnym przypadku będziemy mieli
do czynienia z pętlą nieskończoną.
Oto przykład pętli
w języku HLA:
9&"2'3
.# &"'(
()*)&++22'3
((&2'3
(.# 3
1.9.5. Instrukcja for
W języku HLA pętla for przybiera następującą postać:
%&33'(
(%3
Instrukcja pętli
odpowiada następującej pętli
:
3
.# &'(
3
(.# 3
Wyrażenie inicjalizujące może być dowolną, pojedynczą instrukcją maszynową. Instruk-
cja ta zwykle inicjalizuje rejestr albo zmienną przechowywaną w pamięci, której wartość
decyduje o kontynuowaniu pętli (tzw. licznik pętli). Warunek to wyrażenie logiczne
języka HLA w formacie takim jak dla instrukcji
. Wartość tego wyrażenia decy-
duje o podjęciu kolejnej iteracji pętli i zwykle angażuje licznik pętli. Instrukcja licz-
nika to typowo instrukcja zwiększająca licznik pętli; odpowiednikiem tej instrukcji
jest instrukcja w pętli
, której wykonanie zmienia wartość logiczną warunku
wykonania pętli. Zwykle instrukcją tą jest instrukcja języka HLA, na przykład
.

Rozdział 1.
♦ Wstęp do języka asemblerowego
39
Oto przykład ilustrujący równoważność pętli
i
:
%&9&"2'3"3((&2''(
()*)&++22'3
(%3
// Analogiczna pętla for:
9&"2'3
.# &"'(
()*)&++22'3
((&2'3
(.# 3
1.9.6. Instrukcja repeat
Instrukcja
języka HLA wykorzystuje składnię prezentowaną na rysunku
1.12. Programiści języków C, C++ oraz Java powinni od razu zauważyć, że instrukcja
ta jest odpowiednikiem dostępnej w tych językach instrukcji
.
Rysunek 1.12.
Składnia instrukcji
repeat..until
języka HLA
Test warunku zatrzymania pętli
odbywa się po zakończeniu wykony-
wania ciała pętli. Z tego względu instrukcja (bądź blok instrukcji) ciała pętli zostanie
wykonana przynajmniej raz, niezależnie od wartości początkowej wyrażenia warunku
zatrzymania pętli. Warunek ten jest badany po raz pierwszy dopiero po zakończeniu
pierwszej iteracji; jeśli wyrażenie ma wartość
, pętla jest powtarzana
2
. Jeśli wa-
runek otrzyma wartość
, pętla jest zatrzymywana i sterowanie przekazywane jest
do instrukcji znajdujących się za klauzulą
.
Oto prosty przykład wykorzystania pętli
:
9&"2 !'3
*
()*)&+ !+2 !2'3
),&2 !'3
)& !"'3
2
Znaczenie warunku jest więc w języku HLA odwrotne niż warunku w analogicznej konstrukcji
(.#
znanej z języków C, C++ i Java.
40
Asembler. Sztuka programowania
Jeśli instrukcje ciała pętli mają być wykonane przynajmniej raz, niezależnie od warto-
ści wyrażenia warunku pętli, wtedy w miejsce pętli
lepiej zastosować pętlę
#
— konstrukcja taka będzie efektywniejsza.
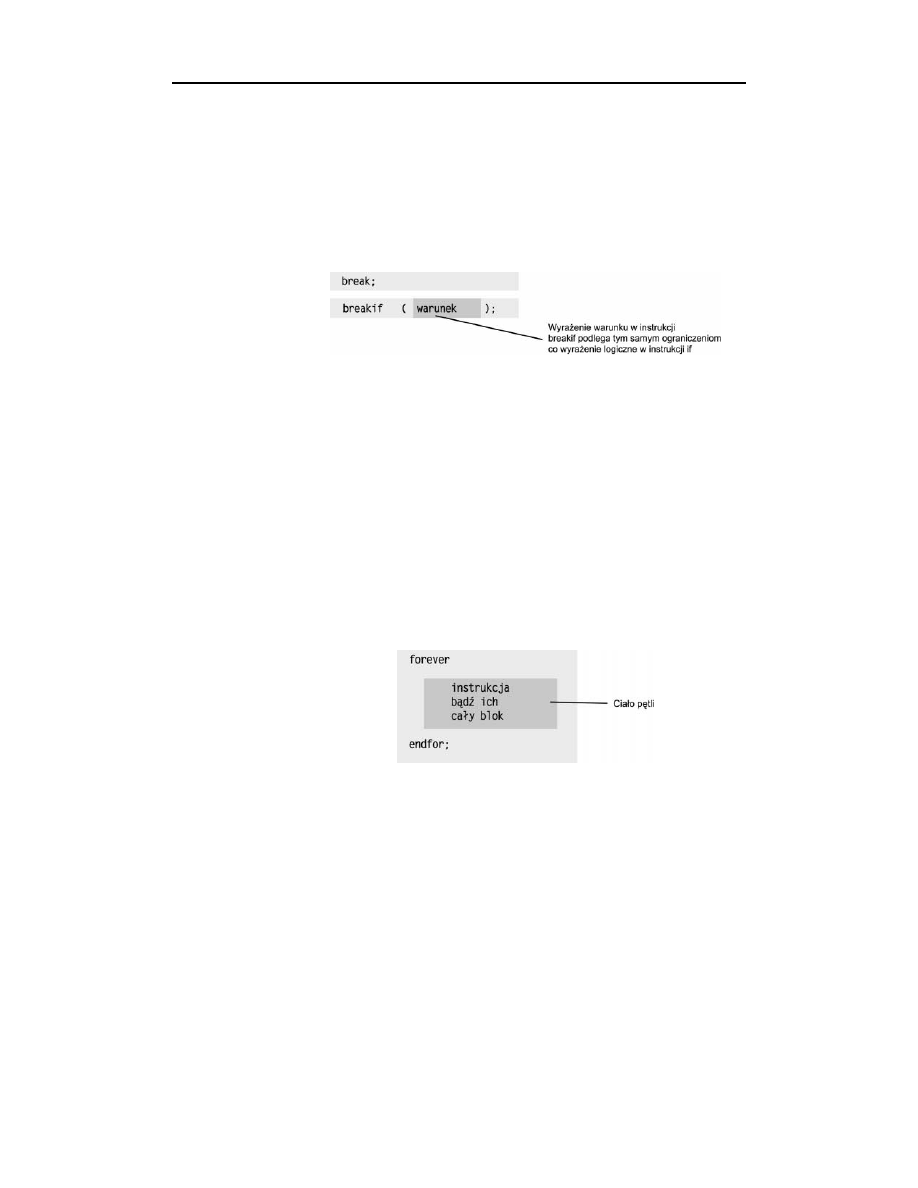
1.9.7. Instrukcje break oraz breakif
Instrukcje
$
i
$
służą do przedwczesnego przekazywania sterowania poza
pętlę. Składnię obu instrukcji ilustruje rysunek 1.13.
Rysunek 1.13.
Składnia instrukcji
break oraz breakif
języka HLA
Instrukcja
$
powoduje bezwarunkowe przerwanie wykonywania pętli; instrukcja
$
uzależnia przekazanie sterowania poza pętlę od spełnienia warunku będącego
wyrażeniem logicznym. Wyjście z pętli następuje wtedy wyłącznie w obliczu wartości
tego wyrażenia.
Zastosowanie instrukcji
$
oraz
$
nie pozwala na przekazanie sterowania poza
pętle zagnieżdżone. W języku HLA służą do tego osobne instrukcje, jak
%
oraz
i
. Szczegółowe informacje na ten temat zawiera dokumentacja języka
HLA. Dalej, język HLA udostępnia instrukcje
!
oraz
!
pozwalające
na przystąpienie do kolejnej iteracji pętli z pominięciem niewykonanych jeszcze instrukcji
ciała pętli. Po szczegóły odsyłam Czytelników do stosownej dokumentacji.
1.9.8. Instrukcja forever
Składnię konstrukcji
prezentuje rysunek 1.14.
Rysunek 1.14.
Składnia instrukcji
forever języka HLA
Instrukcja
tworzy pętlę nieskończoną. Wewnątrz takiej pętli można jednak
umieścić instrukcje
$
bądź
$
celem przerwania pętli w wybranym momencie.
To chyba najczęstszy układ pętli
. Ilustruje go następujący przykład:
%
()*)&+6*.(, 4.&9 8("'-+'3
(= &'3
, 4%&"'3
()*)&+6*.(.9,79 8("+2'3
(%3
Rozdział 1.
♦ Wstęp do języka asemblerowego
41
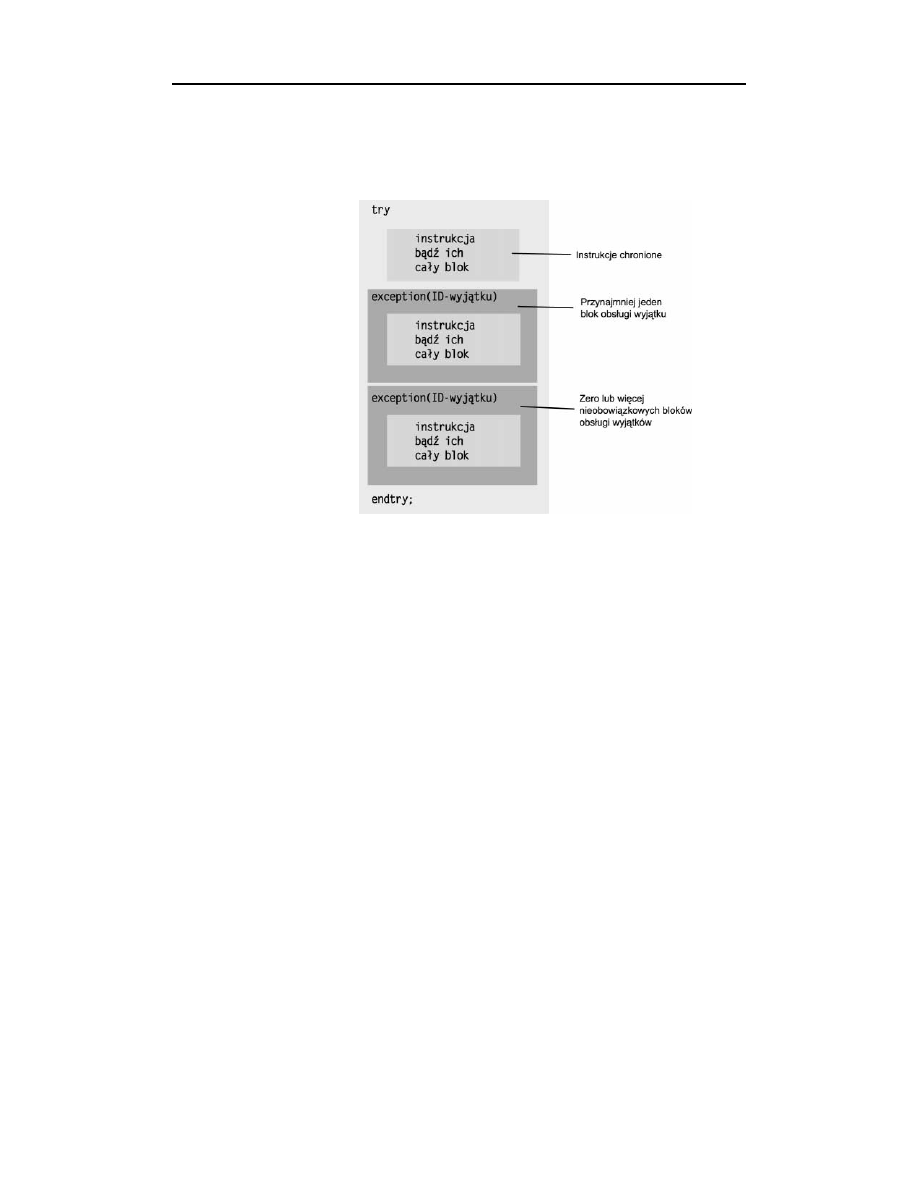
1.9.9. Instrukcje try, exception oraz endtry
Instrukcje
&!&
służą do implementacji bardzo przydatnych bloków
obsługi wyjątków. Składnia instrukcji prezentowana jest na rysunku 1.15.
Rysunek 1.15.
Składnia instrukcji
obsługi wyjątków
Blok instrukcji
&&
służy do ochrony wykonania instrukcji. Jeśli wykonanie
instrukcji znajdujących się pomiędzy klauzulą
&
a pierwszą klauzulą
!
,
tworzących tzw. blok chroniony, przebiegnie bez niespodzianek, sterowanie przeka-
zywane jest do pierwszej instrukcji za klauzulą
&
. Jeśli jednak w czasie wyko-
nywania instrukcji bloku chronionego zdarzy się błąd (wyjątek), wykonanie programu
jest przerywane, a sterowanie przekazywane jest do odpowiedniej klauzuli
!
(skojarzonej z wyjątkiem, który wystąpił). Każdy wyjątek ma unikalny identyfikator
w postaci liczby całkowitej. Niektóre z identyfikatorów wyjątków zadeklarowane zostały
w pliku nagłówkowym
excepts.hhf biblioteki standardowej języka HLA, ale programi-
sta może też definiować własne wyjątki. W momencie sprowokowania wyjątku system
porównuje identyfikator zgłoszonego wyjątku z identyfikatorami określonymi w klauzu-
lach
!
. Jeśli wśród nich znajduje odpowiedni identyfikator, następuje wykonanie
instrukcji określonych w ramach klauzuli
!
. Po zakończeniu wykonywania tych
instrukcji sterowanie przekazywane jest do pierwszej instrukcji za klauzulą
&
.
Jeśli wyjątek zostanie sprowokowany poza blokiem kodu chronionego (tzn. poza ramami
instrukcji
&&
) albo jeśli w ramach instrukcji
&&
brak jest klauzuli
skojarzonej ze zgłoszonym wyjątkiem, program jest awaryjnie zatrzymywany. Zatrzy-
maniu towarzyszy wyprowadzenie stosownego komunikatu na wyjście programu.
Instrukcje
&&
można na przykład wykorzystać do ochrony programu przed
skutkami wprowadzenia niepoprawnych danych:
42
Asembler. Sztuka programowania
*
9&% 2>( = '3
// Uwaga: zmienna GoodInteger musi być typu boolean
7
()*)&+6*.(, 4.-+'3
(= &'3
9&) 2>( = '3
! *& !? '
()*)&+/ **..2.*.(8 +2'3
! *& !;) @)@%A= '
()*)&+6*4 )2.*.(8 +2'3
(73
)&>( = '3
Zastosowana w powyższym programie pętla
pozwala na wykonywanie kodu
ciała pętli tak długo, jak długo użytkownik podaje niepoprawne wartości. Jeśli z powodu
wprowadzenia niepoprawnej wartości jej przypisanie do zmiennej
'(%
będzie
niemożliwe (na przykład z racji umieszczenia we wprowadzonym niedozwolonych dla
liczb znaków albo wprowadzenia zbyt wielkiej wartości), wykonany zostanie odpo-
wiedni do rodzaju błędu blok instrukcji obsługi wyjątku. Obsługa wyjątków polega tu
na wyświetleniu stosownego komunikatu i przekazaniu sterowania poza instrukcję
&&
. Ponieważ z racji wyjątku nie udało się w ramach bloku chronionego ustawić
wartości
dla zmiennej
'(%
, pętla jest wykonywana ponownie. Jeśliby jedna
w ramach bloku chronionego sprowokowany został inny niż obsługiwane wyjątek, pro-
gram zakończyłby działanie po uprzednim wyprowadzeniu komunikatu o błędzie
3
.
W tabeli 1.4 zebrane zostały wyjątki, zdefiniowane w pliku
excepts.hhf w czasie przy-
gotowywania wydania niniejszej książki. Aktualną listę zdefiniowanych w bibliotece
standardowej wyjątków można znaleźć, zaglądając do pliku
excepts.hhf dołączonego
do posiadanej wersji oprogramowania kompilatora HLA.
Większość z tych wyjątków dotyczy sytuacji, których omawianie w niniejszym rozdziale
byłoby przedwczesne. Zostały umieszczone w tabeli wyłącznie gwoli kompletności
omówienia. Każdy z wyjątków opisany jest szczegółowo w dokumentacji
HLA Reference
Manual dokumentacji biblioteki standardowej języka HLA; ostateczną wykładnią jest
zaś sam kod źródłowy biblioteki standardowej HLA. Najczęściej wykorzystywanymi
wyjątkami są
)*
,
++,%
oraz
-%+
.
Omówienie bloku kodu chronionego podjęte zostanie ponownie nieco później. Czytelnik
powinien kontynuować edukację w zakresie podstawowym, zadowalając się na razie
szczątkowymi informacjami o obsłudze wyjątków.
3
Doświadczony programista zastanawia się zapewne, dlaczego w powyższym kodzie do sterowania
przebiegiem pętli wykorzystywana jest zmienna typu
,
— przecież można by identyczny efekt
osiągnąć, stosując instrukcję
, 4%
. Zastosowana konstrukcja ma uzasadnienie, które zostanie
przedstawione w dalszej części książki.
Rozdział 1.
♦ Wstęp do języka asemblerowego
43
Tabela 1.4. Wyjątki zdefiniowane w pliku nagłówkowym excepts.hhf
Identyfikator wyjątku
Znaczenie
!=@ %.
Próba zapisania zbyt długiego łańcucha
!=( !
Próba odwołania do znaku o indeksie spoza łańcucha
!;) @)@%A=
Zbyt wielka wartość dla danego typu zmiennej
! =?#
Zaangażowanie w operacji znaku spoza dopuszczalnego zakresu
(kod ASCI spoza zakresu od 0 do 127)
!?
Niedozwolone znaki w konwersji łańcucha do wartości numerycznej
!(B C(
Odwołanie do pliku za pośrednictwem niepoprawnego uchwytu pliku
!B @* B)
Niemożność otwarcia pliku (np. brak pliku o zadanej nazwie)
!B ?
Niemożność zamknięcia pliku
!B 6
Błąd przy zapisie danych do pliku
!B A (
Błąd przy odczycie danych z pliku
!D4B)
Próba zapisania danych do pliku przy pełnym dysku
!(@%B
Próba odczytania bajta spoza końca pliku
!E 97B)
Brak pamięci do zaspokojenia żądania alokacji
! 9*FD %/011
Próba odwołania do pamięci za pośrednictwem wskaźnika o wartości NULL
!?B E 97
Błąd przy operacji zwalniania pamięci
!6(#F=
Zły format konwersji wartości liczbowej do łańcucha
!FE7?9(159
Wiersz wywołania programu zawiera zbyt dużą liczbę argumentów
!7#* ;
Próba operowania na dwóch tablicach o różnych rozmiarach
!7)(
Próba odwołania do elementu spoza tablicy
!(D
Operacja na niepoprawnej wartości daty
!(D B9
Błąd konwersji łańcucha do daty (łańcuch zawiera niedozwolone znaki)
!F9 @ %.
Przepełnienie w operacji manipulowania informacją o czasie
! B (
Błąd instrukcji asercji
!! ) (,
Próba wywołania metody klasy abstrakcyjnej
! ;
Próba odwołania się do niedozwolonego adresu pamięci
! 45
Program dotarł do punktu zatrzymania (przerwanie 3.)
!= *
Program wykonywany jest z ustawionym znacznikiem wykonania
krokowego
!5
Próba wykonania instrukcji charakterystycznej dla trybu nadzoru
! =
Próba wykonania niedozwolonej instrukcji maszynowe
!)(
Rejestr zawiera wartość spoza zakresu określonego w instrukcji
,)(
!
Wykonanie instrukcji
przy ustawionym znaczniku przepełnienia
!D(
Próba dzielenia przez zero bądź inny błąd dzielenia
!%D 9
Wyjątek operacji zmiennoprzecinkowej (patrz rozdział poświęcony
obliczeniom arytmetycznym)
!%D7G
Wyjątek operacji zmiennoprzecinkowej (patrz rozdział poświęcony
obliczeniom arytmetycznym)
44
Asembler. Sztuka programowania
Tabela 1.4. Wyjątki zdefiniowane w pliku nagłówkowym excepts.hhf — ciąg dalszy
Identyfikator wyjątku
Znaczenie
!% !A )
Wyjątek operacji zmiennoprzecinkowej (patrz rozdział poświęcony
obliczeniom arytmetycznym)
!%(@*
Wyjątek operacji zmiennoprzecinkowej (patrz rozdział poświęcony
obliczeniom arytmetycznym)
!%@ %.
Wyjątek operacji zmiennoprzecinkowej (patrz rozdział poświęcony
obliczeniom arytmetycznym)
!%4?# 4
Wyjątek operacji zmiennoprzecinkowej (patrz rozdział poświęcony
obliczeniom arytmetycznym)
!%0( %.
Wyjątek operacji zmiennoprzecinkowej (patrz rozdział poświęcony
obliczeniom arytmetycznym)
!(C(
System operacyjny odrzucił niepoprawny uchwyt
!4@ %.
System operacyjny zgłosił przepełnienie stosu
1.10. Biblioteka standardowa
języka HLA — wprowadzenie
Język HLA prezentuje się na tle tradycyjnego języka asemblerowego korzystnie dzięki
dwóm aspektom. Pierwszym jest składnia języka HLA zapożyczająca elementy znane
z języków programowania wysokiego poziomu (jak struktury kontroli wykonania ko-
du czy deklaracje zmiennych). Dostępność tych elementów pozwala na efektywne wyko-
rzystanie umiejętności przeniesionych z programowania wysokopoziomowego i tym
samym znacznie szybszą naukę języka asemblerowego. Drugim elementem stanowią-
cym o przewadze HLA nad tradycyjnym asemblerem jest dostępność biblioteki HLA
Standard Library. Biblioteka standardowa języka HLA zawiera wiele prostych w użyciu
procedur języka asemblerowego realizujących typowe zadania programistyczne — ich
dostępność eliminuje konieczność samodzielnego pisania wszystkich, nawet tych naj-
bardziej typowych, elementów programu. Dostępność biblioteki standardowej znosi jedną
z podstawowych trudności, w obliczu których stają programiści chcący poznać język
asemblerowy — trudność tkwiącą w konieczności samodzielnej implementacji złożonych
niekiedy procedur wejścia-wyjścia, niezbędnych w nawet najprostszych programach.
Brak standaryzowanej biblioteki wywołań powodowałby, że każdy początkujący progra-
mista poświęcałby mnóstwo czasu na zaimplementowanie tak podstawowych operacji
jak wyprowadzanie napisów. Jej dostępność oznacza więc, że adept języka asemblerowego
może skoncentrować się na nauce samego języka, nie poświęcając się od samego początku
zgłębianiu tajników podsystemu wejścia-wyjścia danego systemu operacyjnego.
Dostępność rozmaitych procedur bibliotecznych to nie jedyna zaleta języka HLA. W końcu
biblioteki kodu asemblerowego to nie nowy wynalazek
4
. Jednak biblioteka standardowa
4
Popularna jest na przykład biblioteka UCR Standard Library dla programistów języka asemblerowego
procesorów 80x86.

Rozdział 1.
♦ Wstęp do języka asemblerowego
45
języka HLA to nie tylko sam kod procedur, ale również wysokopoziomowy interfejs
wywołań tych procedur. W rzeczy samej język HLA powstał głównie z myślą o możli-
wości tworzenia zestawów procedur bibliotecznych wysokiego poziomu. Ów wyso-
kopoziomowy interfejs wywołań, w połączeniu z wysokopoziomową naturą wielu pro-
cedur, daje programiście niespodziewanie wielkie i równocześnie łatwo dostępne
możliwości.
Biblioteka standardowa języka HLA składa się z szeregu modułów przypisanych do
kilku kategorii. Część z dostępnych modułów zawiera tabela 1.5
5
.
Tabela 1.5. Wybrane moduły biblioteki standardowej HLA
Nazwa modułu
Funkcje
args
Procedury przetwarzania argumentów wiersza polecenia wraz z procedurami
pomocniczymi
conv
Procedury konwersji łańcuchów do wartości różnych typów i konwersji odwrotnych
cset
Procedury operujące na zbiorach znaków
DateTime
Procedury manipulowania datą i czasem
excepts
Procedury obsługi wyjątków
fileio
Procedury plikowych operacji wejścia-wyjścia
hla
Specjalne stałe języka HLA i inne definicje
hll
Implementacja instrukcji znanych z języków wysokopoziomowych
Linux
Wywołania systemowe jądra systemu Linux (tylko w wersji HLA dla
systemu Linux)
math
Procedury implementujące obliczenia arytmetyczne o zwiększonej precyzji,
funkcje trygonometrycznych i inne funkcje matematyczne
memory
Procedury przydziału i zwalniania pamięci wraz z procedurami pomocniczymi
misctypes
Definicje rozmaitych typów danych i operacji na tych typach
patterns
Biblioteka procedur dopasowywania wzorców
rand
Implementacja generatora liczb pseudolosowych i procedur pomocniczych
stdin
Procedury obsługi wejścia
stdout
Procedury obsługi wyjścia
stdlib
Specjalny plik nagłówkowy grupujący wszystkie moduły biblioteki standardowej
języka HLA
strings
Biblioteka procedur manipulowania łańcuchami znakowymi
tables
Biblioteka procedur obsługi tablic asocjacyjnych
win32
Definicje stałych wykorzystywanych w wywołaniach systemu Windows
(tylko w wersji HLA dla środowiska Win32)
x86
Stałe i definicje charakterystyczne dla procesora 80x86
5
Z racji ciągłego rozwoju biblioteki standardowej języka HLA niniejsza lista nie jest zapewne kompletna.
Aktualnej listy modułów należy szukać w dokumentacji języka HLA.
46
Asembler. Sztuka programowania
Część z tych modułów doczeka się szczegółowego omówienia w dalszej części książki.
Tutaj skupimy się na najważniejszych — z punktu widzenia początkującego progra-
misty — procedurach biblioteki standardowej HLA, zebranych w module
.
1.10.1. Stałe predefiniowane w module stdio
Omówienie modułu
biblioteki standardowej należałoby rozpocząć od przedsta-
wienia najczęściej wykorzystywanych stałych. Na przykład w następującym kodzie:
()*)&+#82*7=(+2'3
pojawia się stała
reprezentująca sekwencję znaków przejścia do nowego wiersza.
Identyfikator
nie jest w kontekście programu HLA żadnym słowem zarezerwowanym
języka HLA; jego zastosowanie nie ogranicza się też do wywołania
. Otóż
to jedynie stała, której wartością jest literał łańcuchowy odpowiadający sekwencji znaków
nowego wiersza (w systemie Windows sekwencja ta obejmuje znaki powrotu karetki
i wysuwu wiersza; w Linuksie to pojedynczy znak wysuwu wiersza).
Oprócz stałej
implementacja podsystemu wejścia-wyjścia w bibliotece standardo-
wej HLA zawiera definicje kilku innych przydatnych stałych znakowych. Zostały one
wymienione w tabeli 1.6.
Tabela 1.6. Stałe znakowe definiowane w module wejścia-wyjścia biblioteki standardowej HLA
Stała
Definicja
(,
Znak dzwonka; wydrukowanie tego znaku objawia się wygenerowaniem dźwięku przez
głośniczek systemowy
(,
Znak cofania kursora
(,
Znak tabulacji
(%
Znak wysuwu wiersza
(
Znak powrotu karetki
Z wyjątkiem
wszystkie zaprezentowane tu stałe zdefiniowane są w przestrzeni
nazw
(stąd wymóg poprzedzania nazw stałych przedrostkiem
)
6
. Osadzenie
owych stałych w przestrzeni nazw
pozwoliło na uniknięcie ewentualnych kon-
fliktów z nazwami zmiennych definiowanymi przez programistę. Nazwa
, jako
używana wyjątkowo często, nie została osadzona w przestrzeni nazw
— koniecz-
ność każdorazowego wpisywania
byłaby bardzo uciążliwa.
1.10.2. Standardowe wejście i wyjście programu
Wiele procedur wejścia-wyjścia biblioteki HLA jest prefiksowanych nazwą
bądź
. Technicznie oznacza to, że nazwy tych procedur zdefiniowane zostały wewnątrz
odpowiedniej przestrzeni nazw. W praktyce zastosowanie przedrostka stanowi rów-
nież sugestię co do pochodzenia danych (dane pobierane ze standardowego urządzenia
6
Przestrzenie nazw omówione zostaną w jednym z kolejnych rozdziałów.

Rozdział 1.
♦ Wstęp do języka asemblerowego
47
wejściowego,
) bądź ich przeznaczenia (dane kierowane do standardowego urzą-
dzenia wyjściowego,
). Najczęściej urządzeniem wejściowym jest klawiatura kon-
soli systemowej. Urządzenie wyjściowe to zwykle ekran konsoli. W ogólności więc in-
strukcje z przedrostkiem
bądź
realizują odczyty i zapisy danych z i do
urządzenia konsoli.
Przy uruchamianiu programu z poziomu wiersza poleceń (zwanego w Linuksie powłoką)
można dokonać przekierowania strumieni danych wejściowych i wyjściowych do
urządzeń innych niż domyślne. Na przykład argument wywołania programu w postaci
$.&
powoduje przekierowanie standardowego wyjścia programu do pliku
plik_wy.
Z kolei argument wywołania postaci
$.
powoduje przypisanie standardowego
wejścia programu do pliku źródłowego
plik_we. Oto przykłady przekierowania stan-
dardowego wejścia i wyjścia programu
%
uruchamianego z poziomu wiersza
poleceń
7
:
*=9*)(
*=9)*)!
*=9!)!
1.10.3. Procedura stdout.newln
Procedura
powoduje zapisanie do urządzenia standardowego wyjścia se-
kwencji nowego wiersza. Wywołanie owej procedury jest równoważne wywołaniu
/01
. Wywołanie
jest jednak niekiedy nieco wygodniejsze
bądź bardziej czytelne. Oto przykład wywołania procedury:
() .&'3
1.10.4. Procedury stdout.putiN
Procedury biblioteczne
2
,
3
oraz
4
wyprowa-
dzają na standardowe wyjście programu pojedynczą wartość, odpowiednio: 8-bitową,
16-bitową i 32-bitową, interpretowaną jako liczba całkowita ze znakiem. Argumentem
wywołania może być stała, rejestr bądź zmienna w pamięci — rozmiar argumentu musi
jednak odpowiadać rozmiarowi parametru formalnego procedury.
Omawiane procedury wyprowadzają przekazaną wartość na standardowe wyjście pro-
gramu. Wyprowadzany napis reprezentujący wartość konstruowany jest z użyciem mini-
malnej liczby znaków pozwalających na dokładne odwzorowanie wartości. Jeśli przeka-
zana argumentem wywołania procedury wartość jest ujemna, napis zostanie poprzedzony
znakiem minusa. Oto kilka przykładów wywołań procedur
:
()*)&'3
()*)H&(!'3
()*)&;'3
7
Uwaga dla użytkowników systemu Linux: w zależności od wartości zmiennej środowiskowej
5FC
nazwę programu trzeba być może poprzedzić znakami „./”, np.
I *=9*)(
.

48
Asembler. Sztuka programowania
1.10.5. Procedury stdout.putiNSize
Procedury
2-
,
3-
oraz
4-
zapisują do
standardowego urządzenia wyjściowego wartości interpretowane jako liczby całkowite
ze znakiem — a więc działają podobnie jak procedury
. Tyle że procedury
-
pozwalają lepiej kontrolować format wyprowadzanych napisów —
programista może odpowiednim argumentem wywołania procedury określić minimalną
szerokość wyprowadzanego napisu. W przypadku kiedy wyprowadzana wartość po kon-
wersji będzie zajmowała mniejszą niż podano liczbę znaków, brakujące znaki uzupeł-
niane są znakami wypełnienia — znak wypełnienia również określa się argumentem
wywołania procedury. Składnia wywołania procedur
-
jest następująca:
()*) & 22'3
()*)H &!" 22'3
()*) &#$ 22'3
W miejsce parametru
można przekazać stałą, nazwę rejestru albo nazwę
zmiennej w pamięci — podany argument musi jednak odpowiadać rozmiarem rozmia-
rowi parametru. Parametr
może przyjmować argumenty w postaci stałych
całkowitych z zakresu od –256 do 256. Argumentem tego parametru może być również
zawartość rejestru bądź wartość zmiennej przechowywanej w pamięci. Argumentem
parametru
powinien być pojedynczy znak.
Podobnie jak procedury
procedury
-
wyprowadzają na
urządzenie standardowego wyjścia napis reprezentujący przekazaną w wywołaniu wartość
liczbową interpretowaną jako liczbę całkowitą ze znakiem. W tej wersji programista
może jednak określić szerokość napisu — określa ją jako minimalną liczbę znaków, jaką
powinien zajmować napis. Jeśli wyświetlana wartość zajmować będzie więcej znaków
(na przykład przy próbie wyświetlenia wartości 1234 w polu o szerokości 2), to wypro-
wadzony napis zostanie stosownie poszerzony. Jednak w przypadku, gdy liczba znaków
w napisie jest mniejsza od założonego minimum, brakujące znaki są w kodzie procedury
uzupełniane znakami wypełnienia. Kiedy wyprowadzana wartość argumentu
jest liczbą ujemną, napis zostanie wyrównany w ramach wyprowadzanego pola do
lewej; wartość dodatnia powoduje wyrównywanie napisów do prawej.
Jeśli wartość bezwzględna parametru
jest większa niż minimalna liczba
znaków potrzebnych do dokładnego reprezentowania wyprowadzanej wartości, pro-
cedury
-
uzupełniają napis znakami wypełnienia, dodając je z lewej
bądź z prawej strony napisu (przed bądź za znakową reprezentacją liczby). Znak wy-
pełnienia definiowany jest argumentem
. W zdecydowanej większości
przypadków znakiem tym jest znak spacji, jednak w sytuacjach szczególnych konieczne
może okazać się wypełnienie innym znakiem. Należy tylko pamiętać, że argument pa-
rametru
powinien być wartością znakową. W języku HLA stałe znakowe
ujmowane są w znaki pojedynczego cudzysłowu. W miejsce tego parametru można też
wskazać ośmiobitowy rejestr.
Listing 1.4 prezentuje prosty program w języku HLA demonstrujący sposób wyko-
rzystania procedury
4-
w celu wyświetlenia listy wartości w formie
tabelarycznej.
Rozdział 1.
♦ Wstęp do języka asemblerowego
49
Listing 1.4. Wyprowadzenie kolumn wartości liczbowych — zastosowanie procedury stdout.puti32Size
*=9/)9?)93
J)( &+(,##%+'
-3
??-3
, =/)9?)93
9&KH2'3
9&"2??'3
.# &"'(
%&??'#
() .&'3
9&"2??'3
(%3
()*) &22$$'3
),&2'3
((&2??'3
(.# 3
() .&'3
(/)9?)93
1.10.6. Procedura stdout.put
Procedura
8
to najelastyczniejsza procedura wyprowadzania napisów na
wyjście programu dostępna w module obsługi standardowego wyjścia. Procedura ta łączy
funkcje wszystkich pozostałych procedur wyjścia standardowego, udostępniając pro-
gramiście elegancki i efektywny mechanizm wyprowadzania danych.
W najbardziej ogólnej postaci składnia wywołania procedury
prezentuje
się następująco:
()*)&%'3
Lista argumentów wywołania procedury
może zostać konstruowana ze
stałych, rejestrów i zmiennych; kolejne argumenty oddziela się przecinkami. Procedura
wyprowadza na standardowe wyjście wartości wszystkich kolejnych argumentów wywo-
łania. Jako że procedura ta była już wielokrotnie prezentowana w przykładach, Czytelnik
orientuje się, przynajmniej w zakresie podstawowym, co do sposobu jej wywoływania.
8
Tak naprawdę
()*)
to makrodefinicja, a nie procedura. Rozróżnienie pomiędzy makrodefinicją
a procedurą wykracza jednak poza zakres niniejszego rozdziału; zostanie ono uwzględnione w dalszej
części książki.
50
Asembler. Sztuka programowania
Warto jedynie podkreślić, że niniejsza procedura udostępnia programiście szereg wła-
ściwości, które nie były dotąd prezentowane w przykładach. W szczególności każdy
z argumentów wywołania może być zadany w jednej z dwóch postaci:
-
może być dowolną stałą, rejestrem albo zmienną przechowywaną w pamięci.
W niniejszym rozdziale prezentowane były argumenty w postaci literałów łańcuchowych
i zmiennych w pamięci. Jak dotychczas wszystkie argumenty wywołania odpowiadały
pierwszej możliwej postaci argumentu. W postaci drugiej programista może po dwu-
kropku określić minimalną szerokość napisu reprezentującego wartość — szerokość
ta interpretowana jest podobnie jak w procedurach
-
9
. Przykładowy
program z listingu 1.5 generuje wydruk podobny do tego tworzonego programem
5()
, tyle że tutaj miejsce procedury
-
zajęła procedura
.
Listing 1.5. Demonstracja sposobu określenia szerokości napisów w argumentach procedury stdout.put
*=9/)9?)93
J)( &+(,##%+'
-3
??-3
, =/)9?)93
9&KH2'3
9&"2??'3
.# &"'(
%&??'#
() .&'3
9&"2??'3
(%3
()*)&-'3
),&2'3
((&2??'3
(.# 3
() .&'3
(/)9?)93
Procedura
obsługuje jednak więcej atrybutów. Będą one omawiane w kolej-
nych rozdziałach, w miarę potrzeby ich wprowadzania do programów przykładowych.
9
W odróżnieniu od procedur stdout.putiNSize nie da się tu określić dowolnego znaku wypełnienia
— znakiem tym jest domyślnie znak spacji. W obliczu konieczności zastosowania innego wypełnienia
należy skorzystać z procedur stdout.putiNSize.
Rozdział 1.
♦ Wstęp do języka asemblerowego
51
1.10.7. Procedura stdin.getc
Procedura
%!
wczytuje pojedynczy znak z bufora urządzenia standardowego
wejścia
10
. Znak ten umieszczany jest po wyjściu z procedury w rejestrze AL. Zastosowa-
nie procedury ilustruje program z listingu 1.6.
Listing 1.6. Demonstracja działania procedury stdin.getc
*=9#*)3
J)( &+(,#%%+'
) -3
, =#*)3
// Poniższa pętla wykonywana jest dopóty,
// dopóki użytkownik potwierdza wykonanie kolejnej iteracji.
*
// Wyprowadź 14 wartości.
9&L2) '3
.# &) "'(
()*)&) -'3
),&2) '3
(.# 3
// Zaczekaj, aż użytkownik naciśnie 't' albo 'n'.
()*)&22+6744 8 8 &I'M-+'3
%
( (1&'3
(= &'3
, 4%&$$'3
, 4%&$$'3
()*)&+5 .*.(,$$2,$$-+'3
(%3
() .&'3
)&$$'3
(#*)3
10
Bufor to w tym kontekście ładniejsza nazwa tablicy.
52
Asembler. Sztuka programowania
W powyższym programie wywołanie procedury
6
służy do wymuszenia
przejścia do nowego wiersza strumienia wejściowego. Szczegółowy opis tej procedury
znajduje się nieco dalej, w niniejszym rozdziale.
1.10.8. Procedury stdin.getiN
Procedury
%2
,
%3
oraz
%4
realizują operację wczytania
z urządzenia standardowego wejścia odpowiednio: 8-bitowej, 16-bitowej i 32-bitowej
wartości liczbowej całkowitej. Wczytane wartości umieszczane są w rejestrach AL, AX
bądź EAX. Niniejsze procedury stanowią standardowy sposób wczytywania liczb całko-
witych ze znakiem do programów języka HLA.
Podobnie jak procedura
%!
, procedury
%
wczytują ze standardowego
wejścia sekwencję znaków. W sekwencji tej ignorowane są wszelkie początkowe znaki
odstępów (spacje, znaki tabulacji i tak dalej); reszta sekwencji (zawierająca cyfry poprze-
dzone opcjonalnym znakiem minusa) konwertowana jest do postaci liczbowej. W przy-
padku, kiedy sekwencja wejściowa zawiera znaki inne niż dozwolone lub wprowadzona
wartość nie mieści się w zakresie liczbowym charakterystycznym dla danej procedury,
zgłaszany jest wyjątek (można go przechwycić, umieszczając wywołanie procedury
w bloku kodu chronionego w instrukcji
&&
). Procedura
%2
obsługuje
liczby z zakresu od –128 do 127,
%3
— od –32 768 do 32 767; wartości
wczytywane do programu za pośrednictwem procedury
%4
muszą zaś mieścić
się w przedziale od –2 147 483 648 do 2 147 483 647.
Sposób wykorzystania owych procedur ilustruje listing 1.7.
Listing 1.7. Przykład wykorzystania wywołań stdin.getiN
*=9*)3
J)( &+(,##%+'
-
-3
H-H3
-3
, =*)3
// Pobierz od użytkownika kilka liczb całkowitych różnej wielkości.
()*)&+6*.( . 4, 4.&4 )N'-+'3
(= &'3
9&2'3
()*)&+6*.(. 4, 4.&4 )NHNHN'-+
'3
(= H&'3
9&!2H'3
()*)&+6*.(, 4.&4 )((9(.'-+'3
(= &'3
Rozdział 1.
♦ Wstęp do języka asemblerowego
53
9& !2'3
// Wyświetl podane wartości.
()*)
&
2
+@.*.( ,7-+222
+,.,4.-+2-22
+H,.,4.-+2H-22
+,.,4.-+2-2
'3
(*)3
Warto skompilować i uruchomić powyższy program i sprawdzić, co się stanie, jeśli wpro-
wadzane liczby będą wykraczały poza dozwolony zakres albo ciągi wartości zawierać
będą niedozwolone znaki.
1.10.9. Procedury stdin.readLn i stdin.flushInput
Moment wywołania procedury
%!
czy
%4
nie musi być tożsamy z mo-
mentem wprowadzenia danych przez użytkownika. Biblioteka standardowa języka HLA
buforuje dane wprowadzane na standardowe wejście, wczytując jednorazowo cały
wiersz tekstu wprowadzanego na to wejście. Wywołanie procedury wejścia może więc
zostać zrealizowane za pośrednictwem operacji odczytu danych z bufora wejściowego
(o ile ten nie jest pusty). Choć buforowanie w ogólności poprawia efektywność mani-
pulowania danymi wejściowymi, niekiedy wprowadza zamieszanie, jak w poniższym
przykładzie:
()*)&+6*.( . 4, 4.&4 )N'-+'3
(= &'3
9&2'3
()*)&+6*.(. 4, 4.&4 )NHNHN'-+'3
(= H&'3
9&!2H'3
Programista ma nadzieję, że wykonanie powyższego kodu da następujący efekt: program
wyświetli monit o podanie liczby, zaczeka na wprowadzenie jej przez użytkownika,
wyświetli kolejny monit i również zaczeka na wprowadzenie liczby. W rzeczywistości
program może mieć nieco inny przebieg. Jeśli, na przykład, powyższy kod zostanie uru-
chomiony, a użytkownik w odpowiedzi na pierwszy monit wprowadzi łańcuch „123 456”
program nie będzie już po wyświetleniu drugiego monitu oczekiwał na wprowadzenie
danych — procedura
%3
odczyta po prostu drugi z wprowadzonych do bufora
wejściowego łańcuchów (456).
Procedury wejścia oczekują na wprowadzenie tekstu przez użytkownika jedynie wtedy,
kiedy bufor wejściowy jest pusty. Dopóki zawiera on jakiekolwiek znaki, procedury
wejścia ograniczają się do odczytu z bufora. Można to wykorzystać, konstruując na-
stępujący kod:
54
Asembler. Sztuka programowania
()*)&+6*.((. ,74. -+'3
(= &'3
9& !2'3
(= &'3
9& !2# ;'3
Tutaj zezwala się wprost użytkownikowi na jednorazowe (w ramach pojedynczego
wiersza) wprowadzenie dwóch liczb. Liczby te powinny zostać oddzielone jednym bądź
kilkoma znakami odstępu. Pozwala to na zaoszczędzenie miejsca na ekranie. Tutaj
buforowanie danych wejściowych okazało się korzystne. Kiedy indziej jednak może
być odwrotnie.
Na szczęście biblioteka standardowa języka HLA przewiduje dwie procedury sterujące
działaniem bufora standardowego urządzenia wejściowego. Są to procedury
6
oraz
(
. Pierwsza z nich usuwa z bufora wszystko, co zostało w nim
umieszczone wcześniej, i tym samym wymusza wprowadzenie przez użytkownika nowe-
go wiersza danych. Druga po prostu usuwa całą zawartość bufora. Oczyszczenie bufora
powoduje, że przy następnym wywołaniu dowolnej z procedur wejścia, użytkownik
będzie musiał wprowadzić nowy wiersz danych. Procedurę
6
wywoł uje
się zwykle bezpośrednio przez wywołaniem dowolnej procedury wejścia. Procedura
(
wywoływana jest zaś typowo bezpośrednio po odczytaniu danych
z bufora wybraną procedurą wejścia.
Jeśli w programie wykorzystywana jest procedura
6 i okaże się, że
konieczne jest dwukrotne wprowadzenie danych, to należy zastanowić się nad wyko-
rzystaniem w jej miejsce procedury
(. W ogólności ta ostatnia proce-
dura, pozwalająca na opróżnienie bufora przez kolejną operacją wejścia, jest wy-
korzystywana znacznie częściej. Konieczność zastosowania procedury
6
jest bardzo rzadka — należy ją stosować wyłącznie tam, gdzie konieczne jest wymu-
szenie na użytkowniku wprowadzenia nowego, aktualnego wiersza danych.
1.10.10. Procedura stdin.get
Procedura
%
łączy w sobie przedstawione wcześniej procedury wejścia, udo-
stępniając ich funkcje za pośrednictwem pojedynczego wywołania. Procedura
%
jest przy tym nieco prostsza w użyciu niż
, ponieważ jedynymi argumen-
tami wywołania tej pierwszej są nazwy zmiennych (lub rejestrów), w których mają
zostać umieszczone wczytane wartości.
Przyjrzyjmy się ponownie przykładowi z poprzedniego punktu:
()*)&+6*.((. ,74. -+'3
(= &'3
9& !2'3
(= &'3
9& !2# ;'3
Równoważny przykład wykorzystujący procedurę
%
wyglądałby następująco:
()*)&+6*.((. ,74. -+'3
(= &2# ;'3

Rozdział 1.
♦ Wstęp do języka asemblerowego
55
Jak widać, zastosowanie procedury
%
może program skrócić i zwiększyć jego
czytelność.
Należy przy tym pamiętać, że wywołanie procedury
%
powoduje umieszczenie
wczytanych wartości od razu we wskazanych zmiennych; żadne z wczytanych wartości
nie pojawią się w rejestrach, chyba że rejestry te wystąpią na liście argumentów wywo-
łania. Argumentami wywołania mogą być zarówno nazwy zmiennych, jak i nazwy
rejestrów.
1.11. Jeszcze o ochronie wykonania
kodu w bloku try..endtry
Jak zapewne Czytelnik pamięta, instrukcje
&&
otaczają blok kodu, którego
wykonanie może potencjalnie sprowokować wyjątki zakłócające działanie programu.
Wyjątki mogą mieć trzy źródła: mogą być zgłaszane sprzętowo (np. w przypadku dzie-
lenia przez zero), generowane przez system operacyjny albo podnoszone wykonaniem
odpowiedniej instrukcji języka HLA. Programista może przechwytywać i obsługiwać
sytuacje wyjątkowe, umieszczając stosowny kod w ramach klauzuli
!
. Typowy
przykład zastosowania instrukcji
&&
ilustruje listing 1.8.
Listing 1.8. Przykład zastosowania bloku try..endtry
*=9 (*)3
J)( &+(,##%+'3
-
)-)H3
, = (*)3
7
()*)&+6*.(, 4., 4)-+'3
(= &)'3
()*)&+6*.(-+2)2'3
! *& !? '
()*)&+6*.(7=. (. 4+'3
! *& !;) @)@%A= '
()*)&+6*.(,8 ,7()+'3
(73
( (*)3

56
Asembler. Sztuka programowania
W języku HLA instrukcje znajdujące się za słowem
&
, a przed pierwszą klauzulą
!
noszą miano instrukcji chronionych. Jeśli podczas wykonywania takich
instrukcji zgłoszony zostanie wyjątek, sterowanie zostanie przekazane do pierwszej
klauzuli
!
skojarzonej z danym wyjątkiem, przeszukując kolejne klauzule pod
kątem zgodności identyfikatora wyjątku zadeklarowanego ze zgłoszonym
11
. Identyfi-
kator wyjątku to po prostu 32-bitowa liczba. Stąd również każda wartość umieszczana
w nawiasach klauzuli
!
powinna być wartością 32-bitową. Predefiniowane
wartości wyjątków języka HLA wymienione są w pliku
excepts.hhf. I choć byłoby to nie-
wątpliwie rażącym naruszeniem przyjętego powszechnie stylu programowania, w klau-
zulach
!
dozwolone jest podawanie wprost wartości numerycznych wyjątków
bez korzystania z predefiniowanych nazw stałych.
1.11.1. Zagnieżdżone bloki try..endtry
Jeśli w wyniku przeszukania klauzul
!
nie nastąpi dopasowanie identyfikatora
wyjątku, będzie miało miejsce przeszukanie klauzul nadrzędnego bloku
&&
,
w którym blok bieżący jest zagnieżdżony dynamicznie. Spójrzmy na przykład z li-
stingu 1.9.
Listing 1.9. Zagnieżdżanie instrukcji try..endtry
*=9 (*)3
J)( &+(,##%+'3
-
)-)H3
, = (*)3
7
7
()*)&+6*.(, 4., 4)-+'3
(= &)'3
()*)&+6*.(-+2)2'3
! *& !? '
()*)&+6*.(7=. (. 4+'3
(73
()*)&+( .74* * 4 )+'3
! *& !;) @)@%A= '
11
W programie HLA identyfikator ten umieszczany jest w rejestrze EAX. Stąd po przekazaniu sterowania
do odpowiedniej klauzuli
! *
można odwoływać się do identyfikatora wyjątku, odwołując się
do rejestru EAX.
Rozdział 1.
♦ Wstęp do języka asemblerowego
57
()*)&+6*.(,8 ,7()+'3
(73
( (*)3
Na listingu 1.9 widać zagnieżdżone dwa bloki instrukcji
&&
. Jeśli w ramach
wykonania instrukcji
%
użytkownik wprowadzi wartość większą od 4 miliardów
z kawałkiem, procedura
%
podniesie wyjątek
++,%
. Kiedy wyjątek
ten zostanie przekazany do systemu wykonawczego HLA, nastąpi przeszukanie klauzul
!
bieżącego bloku
&&
(tego, w którym nastąpiło zgłoszenie wyjątku;
w prezentowanym przykładzie jest to blok zagnieżdżony). Jeśli nie uda się dopasować
identyfikatora wyjątku
++,%
w bieżącym bloku
&&
, system
wykonawczy HLA sprawdzi, czy bieżący blok
&&
nie został zagnieżdżony
w innym bloku
&&
(co akurat ma miejsce na listingu 1.9). W takim przypadku
system wykonawczy HLA przeszuka również klauzule
!
bloku zewnętrznego
(nadrzędnego). Na listingu 1.9 ów blok zawiera klauzulę z odpowiednią wartością iden-
tyfikatora, więc sterowanie przekazywane jest do pierwszej instrukcji umieszczonej za
klauzulą
!/++,%0
.
Po opuszczeniu bloku
&&
system wykonawczy traktuje ów blok jako nieak-
tywny i jeśli teraz nastąpi zgłoszenie wyjątku, system wykonawczy HLA nie będzie
przeszukiwał klauzul
!
tego bloku
12
. Pozwala to na różnicowanie procedur
obsługi wyjątków w różnych miejscach programu.
Jeśli ten sam wyjątek obsługują dwa bloki
&&
, a jeden z tych bloków jest
zagnieżdżony w bloku chronionym pierwszego, to w momencie zgłoszenia wyjątku
podczas wykonywania wewnętrznego bloku chronionego system wykonawczy HLA
przekaże sterowanie do kodu obsługi wyjątku w wewnętrznym bloku
&&
.
Kod obsługi tego samego wyjątku w zewnętrznym bloku jest ignorowany — HLA nie
przekazuje sterowania do tego kodu.
W przykładzie z listingu 1.9 druga instrukcja
&&
została statycznie zagnież-
dżona w pierwszym bloku
&&
13
. Wcześniej wspomniano, że jeśli bieżący blok
&&
nie zawiera kodu obsługi zgłoszonego wyjątku, następuje przeszukanie
klauzul
!
kolejnych bloków
&&
, w których blok bieżący został zagnież-
dżony dynamicznie. W przypadku zagnieżdżenia dynamicznego zagnieżdżenie nie wy-
nika wprost ze struktury kodu źródłowego. Sterowanie może zostać przekazane z wnętrza
bloku
&&
do zupełnie innego miejsca programu, niżby to wynikało z samej
struktury kodu. Jeśli w tamtym miejscu realizowany jest blok chroniony instrukcji
&&
, to mamy do czynienia z zagnieżdżeniem dynamicznym. Zagnieżdżenie dy-
namiczne można zrealizować na kilka sposobów, a najbardziej chyba intuicyjnym (i za-
pewne znanym Czytelnikowi z języków wysokiego poziomu) z nich jest wywołanie
12
Chyba że sterowanie zostanie wcześniej przekazane z powrotem do bloku
7 (7
, na przykład
kiedy jest on umieszczony w ciele pętli.
13
Zagnieżdżenie statyczne należy rozumieć jako „fizyczne”, bo wynikające wprost ze struktury kodu
źródłowego, umieszczenie jednego bloku wewnątrz drugiego. Kiedy mowa o zagnieżdżaniu instrukcji,
zwykle chodzi o zagnieżdżanie statyczne.
58
Asembler. Sztuka programowania
procedury. Kiedy więc w dalszej części książki omawiany będzie sposób pisania i wywo-
ływania procedur w języku asemblerowym, należy pamiętać, że wywołanie procedury
z bloku kodu chronionego może doprowadzić do dynamicznego zagnieżdżenia bloków
&&
— wystarczy, aby procedura również zawierała blok
&&
(i aby
został on wykonany).
1.11.2. Klauzula unprotected bloku try..endtry
Wykonywanie instrukcji
&
powoduje zawsze zachowanie bieżącego środowiska wyjąt-
ków i przygotowanie systemu wykonawczego (na wypadek zgłoszenia wyjątku) do prze-
kazania sterowania do odpowiedniej klauzuli
!
. Jeśli program przebrnie przez
blok instrukcji chronionych, pierwotne środowisko wyjątków jest przywracane, a ste-
rowanie przekazywane jest do pierwszej instrukcji znajdującej się za klauzulą
&
.
Bardzo ważną rolę w tej procedurze ma ostatni jej etap, czyli przywrócenie pierwot-
nego środowiska wyjątków. W przypadku jego pominięcia wszelkie kolejne wyjątki
powodowałyby przekazanie sterowania do opuszczonego już bloku
&&
. Problem
ten ilustruje listing.1.10.
Listing 1.10. Niepoprawne opuszczenie bloku instrukcji try..endtry
*=9 (*)L3
J)( &+(,##%+'
*)-)3
, = (*)L3
// Poniższa pętla jest kontynuowana dopóty, dopóki użytkownik wprowadza
// nieprawidłową liczbę; wyjście z pętli następuje w wyniku wykonania instrukcji break.
%
7
()*)&+5(8, 4.-+'3
(= &*)'3
()*)&+6*.(-+2*)2'3
, 43
! *& !;) @)@%A= '
()*)&+1,8 ,7()3*..*.( +'3
! *& !? '
()*)&+?=. (. 43*..*.( +
'3
(73
(%3
Rozdział 1.
♦ Wstęp do języka asemblerowego
59
// Uwaga: poniższy kod znajduje się poza pętlą i nie jest osadzony w bloku chronionym
// instrukcji try..endtry
()*)&+5(88 8 (, -+'3
(= &*)'3
()*)&+/.,-+2*)2'3
( (*)L3
Niniejszy przykład z pozoru implementuje niezawodny, odporny na błędy system wpro-
wadzania danych: wokół bloku kodu chronionego rozciągnięta jest pętla wymuszająca
ponowne wprowadzenie danych przez użytkownika, jeśli w poprzedniej próbie nie
udało się ich poprawnie odczytać. Pomysł jest dobry; problem tkwi w jego nieprawi-
dłowej realizacji. Otóż instrukcja
$
powoduje opuszczenie pętli
bez przywrócenia poprzedniego stanu środowiska wyjątków. Z tego względu, kiedy
program wykonuje procedurę
%
umieszczoną poza pętlą (a tym bardziej poza
blokiem kodu chronionego), system obsługi wyjątków wciąż traktuje jej kod jako chro-
niony. Jeśli więc przy okazji jego wykonania zgłoszony zostanie wyjątek, sterowanie
zostanie przekazane z powrotem do stosownej klauzuli
!
opuszczonego już
przecież bloku
&&
. Jeśli identyfikatorem wyjątku będzie
++,%
albo
)*
, wyświetlony zostanie stosowny komunikat, a użytkownik
ponownie zmuszony będzie do wprowadzenia liczby. Tego zaś programista raczej
nie przewidywał.
Przekazanie sterowania do nieodpowiedniego bloku
&&
to tylko część pro-
blemu. Kod z listingu 1.10 obarczony jest inną poważną wadą, związaną ze sposobem
zachowywania i następnie przywracania przez system wykonawczy HLA środowiska
wyjątków. W szczególności bowiem HLA zachowuje informacje o stanie systemu
wyjątków w specjalnym obszarze pamięci zwanym stosem. Jeśli po wyjściu z bloku
&&
stan środowiska wyjątków nie zostanie przywrócony, informacje o tym
środowisku pozostaną na stosie; obecność na nim nadmiarowych danych może zaś do-
prowadzić do błędnego działania programu.
Jest już chyba jasne, że program nie powinien opuszczać bloku
&&
z pomi-
nięciem etapu przywrócenia pierwotnego stanu środowiska wyjątków. Wiadomo, że
sposób wprowadzania danych zaprezentowany na listingu 1.10 jest niepoprawny, ale
z drugiej strony sama koncepcja wymuszania powtarzania operacji wprowadzania aż
do skutku jest jak najbardziej słuszna. Można ją zaimplementować przy użyciu specjal-
nej klauzuli bloku
&&
. Spójrzmy na kod z listingu 1.11.
Listing 1.11. Blok pozbawiony ochrony wewnątrz bloku try..endtry
*=9 (*)3
J)( &+(,##%+'
*)-)3
, = (*)3
60
Asembler. Sztuka programowania
// Poniższa nieskończona pętla wykonywana jest dopóty, dopóki użytkownik wprowadza
// niepoprawne dane. Wyjście z pętli następuje w wyniku wykonania instrukcji break.
// Instrukcja ta, mimo że obecna wewnątrz bloku try..endtry, znajduje się w bloku
// kodu niechronionego sygnalizowanego klauzulą unprotected.
%
7
()*)&+5(8, 4.-+'3
(= &*)'3
()*)&+6*.(-+2*)2'3
)* (
, 43
! *& !;) @)@%A= '
()*)&+1,8 ,7()3*..*.( +'3
! *& !? '
()*)&+?=. (. 43*..*.( +
'3
(73
(%3
// Uwaga: poniższy kod znajduje się poza pętlą i nie jest osadzony w bloku chronionym
// instrukcji try..endtry
()*)&+5(88 8 (, -+'3
(= &*)'3
()*)&+/.,-+2*)2'3
( (*)3
Osiągnięcie klauzuli
!
inicjuje operację przywrócenia pierwotnego stanu
środowiska wyjątków. Oczywiste jest, że po przejściu do bloku kodu niechronionego
wykonanie kodu nie jest już chronione na wypadek zgłoszenia wyjątków. Klauzula
!
nie znosi jednak ochrony kodu realizowanej w dynamicznie zagnieżdżo-
nych zewnętrznych blokach
&&
— klauzula
!
odnosi się jedynie
do tego bloku
&&
, w którym została umieszczona. Jako że na listingu 1.11
instrukcja przerywająca pętlę,
$
, znajduje się za klauzulą
!
, przekazanie
sterowania poza pętlę odbywa się po uprzednim przywróceniu stanu wyjątków.
Słowo
!
, jeśli już występuje w ramach instrukcji
&
, powinno znajdować
się bezpośrednio za blokiem kodu chronionego. Musi więc poprzedzać wszystkie klau-
zule
!
.

Rozdział 1.
♦ Wstęp do języka asemblerowego
61
W obliczu zgłoszenia wyjątku system wykonawczy HLA automatycznie przywraca
pierwotny stan środowiska wykonania. Z tego względu w ramach kodu obsługi wyjątku,
po klauzuli
!
można swobodnie korzystać z instrukcji
$
, nie obawiając się
o negatywne efekty charakterystyczne dla niepoprawnego opuszczenia bloku
&&
.
Z racji przywrócenia pierwotnego stanu wyjątków w bloku niechronionym oraz w kodzie
obsługi wyjątku po klauzuli
!
, wystąpienie wyjątku w jednym z tych obszarów
powoduje natychmiastowe przekazanie sterowania do zewnętrznego bloku
&&
,
w którym blok bieżący został dynamicznie zagnieżdżony. W przypadku braku takiego
bloku program jest awaryjnie przerywany, a na standardowe wyjście wyprowadzany
jest stosowny komunikat o błędzie.
1.11.3. Klauzula anyexception bloku try..endtry
Typowo instrukcji
&
towarzyszy szereg klauzul
!
obsługujących wszelkie
wyjątki, których wystąpienie w kodzie chronionym zdoła przewidzieć programista.
Niekiedy to nie wystarcza — konieczne jest wtedy zapewnienie obsługi wszystkich moż-
liwych (a nie tylko przewidzianych) wyjątków, aby program nie został przedwcześnie
zakończony. Jeśli programista jest autorem całości kodu bloku chronionego, powinien
być zdolny do przewidzenia wszystkich sytuacji wyjątkowych związanych potencjalnie
z wykonaniem bloku. Jeśli jednak w bloku tym znajdują się wywołanie procedury biblio-
tecznej, wywołanie funkcji interfejsu systemu operacyjnego czy inne instrukcje, nie
w pełni kontrolowane przez programistę, przewidzenie wszystkich możliwych wyjątków
może być niemożliwe. Tymczasem zgłoszenie wyjątku o identyfikatorze innym niż
identyfikatory podane w kolejnych klauzulach
!
może doprowadzić do załamania
programu. Szczęśliwie język HLA przewiduje umieszczenie w bloku
&&
klauzuli
&!
, do której dopasowywane są wszystkie wyjątki, których identy-
fikatorów nie uda się odpasować do klauzul
!
.
Klauzula
&!
nie różni się wiele od klauzuli
!
— jedyna odmienność
tkwi w braku konieczności określania identyfikatora wyjątku (to oczywiste). Jeśli obok
klauzul
!
w bloku
&&
znajduje się klauzula
&!
, powinna
ona być ostatnią klauzulą obsługi wyjątków w bloku. Dopuszczalne jest naturalnie, aby
klauzula
&!
była jedyną klauzulą obsługi wyjątków w bloku
&&
.
Po przekazaniu sterowania do klauzuli
&!
identyfikator wyjątku umiesz-
czany jest w rejestrze EAX. Identyfikator ten można w ramach kodu obsługi wyjątku
sprawdzać, dopasowując obsługę do przyczyny zgłoszenia wyjątku.
1.11.4. Instrukcja try..endtry i rejestry
Każdorazowe wkroczenie do bloku
&&
oznacza konieczność zachowania na
stosie 16 bajtów informacji o stanie środowiska wyjątków. Przywrócenie środowiska
wyjątków po opuszczeniu tego bloku (albo w wyniku osiągnięcia klauzuli
!
)
wymaga odczytania właśnie owych 16 bajtów. Do momentu zgłoszenia wyjątku reali-
zowanie kodu chronionego nie wpływa na zawartość żadnych rejestrów. Sytuacja zmienia
się w momencie zgłoszenia wyjątku w wyniku wykonania instrukcji kodu chronionego.

62
Asembler. Sztuka programowania
Po przejściu do klauzuli
!
rejestr EAX zawiera identyfikator (numer) wyjątku.
Reszta rejestrów ogólnego przeznaczenia zawiera wartości nieokreślone. Ponieważ
system operacyjny może zgłosić wyjątek w reakcji na błąd sprzętowy, nie powinno
się nawet zakładać, że rejestry ogólnego przeznaczenia zawierać będą po rozpoczęciu
obsługi wyjątku wartości, które znajdowały się w nich pierwotnie. Kod generowany przez
system HLA do obsługi wyjątków może być różny w różnych wersjach kompilatora,
więc poleganie na zawartości rejestrów w kodzie obsługi wyjątków jest co najmniej
ryzykowne.
Jako że po przejściu do bloku kodu obsługi wyjątku nie można czynić żadnych założeń
co do zawartości rejestrów (z wyjątkiem rejestru EAX), to jeśli kod kontynuowany za
klauzulą
&
zakłada obecność w rejestrach jakichś konkretnych wartości (np.
wartości umieszczonych tam przed wkroczeniem do bloku kodu chronionego), należy te
wartości przywrócić samodzielnie. Zaniedbanie tego może doprowadzić do błędnego
działania programu, przy czym błędy tego rodzaju są tym trudniejsze do wykrycia, że
sytuacje wyjątkowe z definicji zdarzają się rzadko, co utrudnia odtworzenie i diagnostykę
błędu; dodatkowym utrudnieniem jest to, że nie zawsze zgłoszenie wyjątku musi zmienić
wartość konkretnego rejestru. Sposób rozwiązania problemu zachowania wartości reje-
strów prezentuje następujący fragment kodu:
)9-3
O
9&"2)9'3
%&9&"2 ,!'3 ,!3& ,!''(
*)#& ,!'3
// Zachowanie wartości rejestru EBX na wypadek wyjątku.
%
7
(= &'3
)* (, 43
! *& !? '
()*)&+/ (..PQ3*,)8*. -+'3
(73
(%3
**& ,!'3
// Przywrócenie zawartości rejestru EBX.
((& ,!2 !'3
((& !2)9'3
(%3
Ponieważ mechanizm obsługi wyjątków powoduje potencjalne zmiany wartości reje-
strów i ponieważ obsługa wyjątków to proces stosunkowo nieefektywny, nie powinno się
stosować instrukcji
&
w roli zwykłej struktury sterującej wykonaniem programu (na
przykład symulując w bloku
&&
działanie instrukcji wyboru znanych z języków
wysokiego poziomu, jak
!
czy
!
). Takie praktyki wpływają ujemnie na wy-
dajność programu; mogą tez wprowadzać niepożądane, trudne do wykrycia i zdiagno-
zowania efekty uboczne wynikające z zakłócania zawartości rejestrów.
Rozdział 1.
♦ Wstęp do języka asemblerowego
63
Działanie mechanizmu wyjątków opiera się na założeniu, że rejestr EBP wykorzy-
stywany jest wyłącznie w roli wskaźnika rekordów aktywacji (rekordy aktywacji
omawiane są w rozdziale poświęconym procedurom). Standardowo programy HLA
wykorzystują ów rejestr właśnie w tej roli. Warunkiem poprawnego działania pro-
gramów jest więc unikanie modyfikowania zawartości rejestru EBP. Jeśli rejestr ten
zostanie użyty w roli rejestru ogólnego przeznaczenia, na przykład w obliczeniach
arytmetycznych, obsługa wyjątków systemu wykonawczego HLA nie będzie działać
poprawnie, pojawić się też mogą dodatkowe problemy. To samo tyczy się zresztą re-
jestru ESP — jego również nie należy wykorzystywać jako rejestru ogólnego prze-
znaczenia.
Wyszukiwarka
Podobne podstrony:
Asembler Sztuka programowania asemsp
Asembler Sztuka programowania asemsp
Asembler Sztuka programowania asemsp
Asembler Sztuka programowania asemsp
Asembler Sztuka programowania asemsp
Asembler Sztuka programowania asemsp
ebook Jeff Webb Excel 2003 Programowanie Zapiski programisty (ex23pr) helion onepress free ebook d
Asembler Sztuka programowania Wydanie II asesz2
Asembler Sztuka programowania
Asembler Sztuka programowania
Asembler Sztuka programowania Wydanie II 2
Asembler Sztuka programowania
Asembler Sztuka programowania Wydanie II
Asembler Sztuka programowania
Asembler Sztuka programowania
Asembler Sztuka programowania Wydanie II asesz2
Asembler Sztuka programowania Wydanie II asesz2
Asembler Sztuka programowania Wydanie II asesz2
więcej podobnych podstron