ZESPÓŁ SZKÓŁ PONADGIMNAZJALNYCH NR 3
„MECHANIK’’ im. Stanisława Staszica
w Kro
ś
nie
PRACOWNIA
URZ
Ą
DZE
Ń
MECHATRONICZNYCH
Temat
ć
wiczenia
Układy elektropneumatyczne.
Projekt Nr: EP_031
Wykonał:
Jarosław Tymczyszyn
Kl. IIIdT
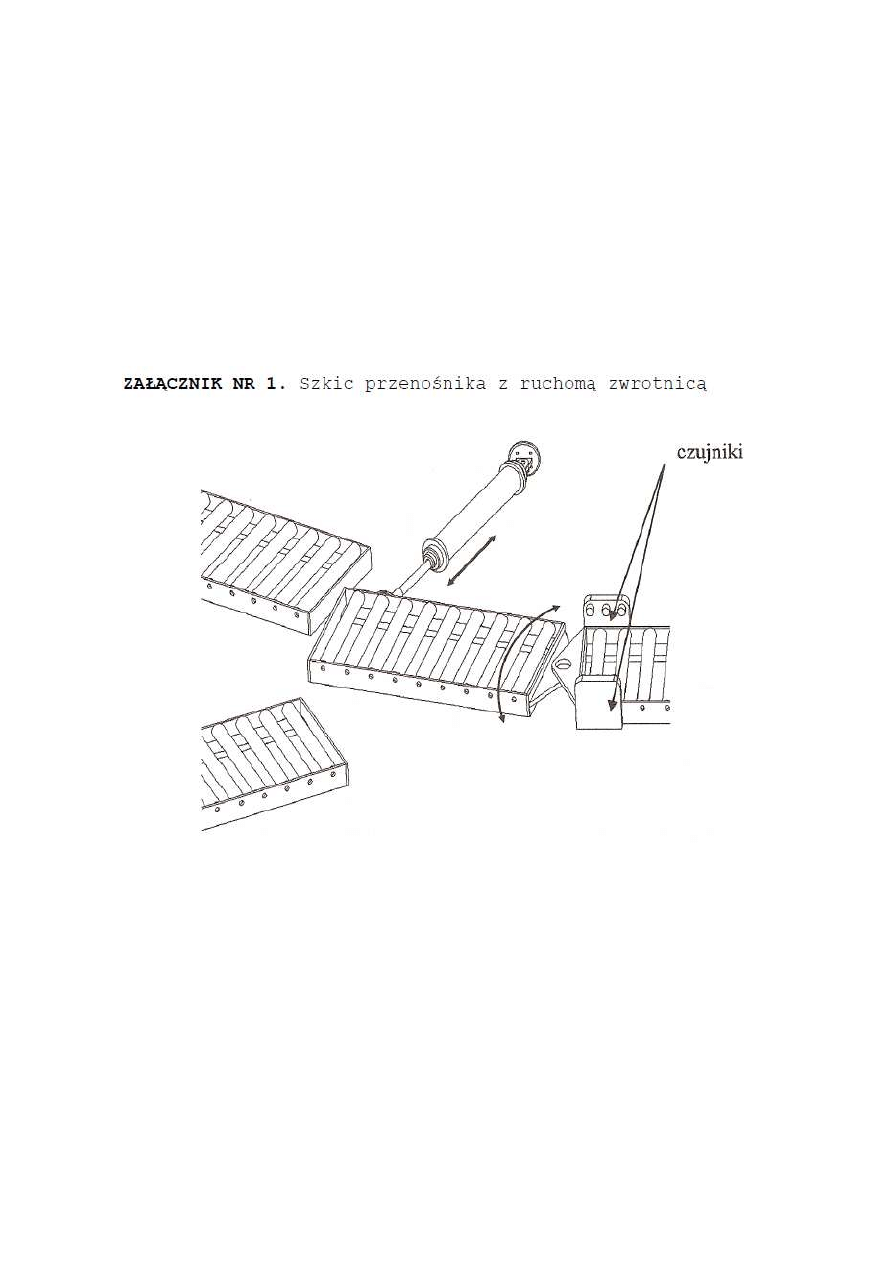
1.Tytuł projektu
Projekt prac zwi
ą
zanych z doborem, zaprojektowaniem,
monta
ż
em i podł
ą
czeniem elektropneumatycznego układ
sterowania przeno
ś
nika z ruchom
ą
zwrotnic
ą
za pomoc
ą
pojemno
ś
ciowego i indukcyjnego czujnika poło
ż
enia,
którego elementem wykonawczym jest siłownik
dwustronnego działania.

2.Zało
ż
enia wynikaj
ą
ce z tre
ś
ci zadania i zał
ą
czników.
- Ruch tłoczyska siłownika dwustronnego działania b
ę
dzie sterowany
za pomoc
ą
pojemno
ś
ciowych i indukcyjnych czujników poło
ż
enia.
- Elementem wykonawczym tego układu jest siłownik
dwustronnegodziałania, który nap
ę
dza zwrotnic
ę
przeno
ś
nika.
- Proces działania siłownika dwustronnego działania odbywa si
ę
po
naci
ś
ni
ę
ciu przycisku S1(START).
- W momencie znalezienia si
ę
transportowanego elementu w obszarze
działania czujników układ sterowania powinien tak ustawi
ć
zwrotnic
ę
,
aby element metalowy został skierowany na tor lewy( siłownik
wysuni
ę
ty), natomiast element z tworzywa sztucznego skierowany na
tor prawy ( siłownik cofni
ę
ty )
- Czujniki znajduj
ą
si
ę
przed zwrotnic
ą
ta
ś
my.
- Napi
ę
cie układu sterowania 24V DC
- Do wysterowania siłownika słu
żą
elektrozawór z dwiema
cewkami Y1 i Y2.
- Skok tłoczyska siłownika 100mm.
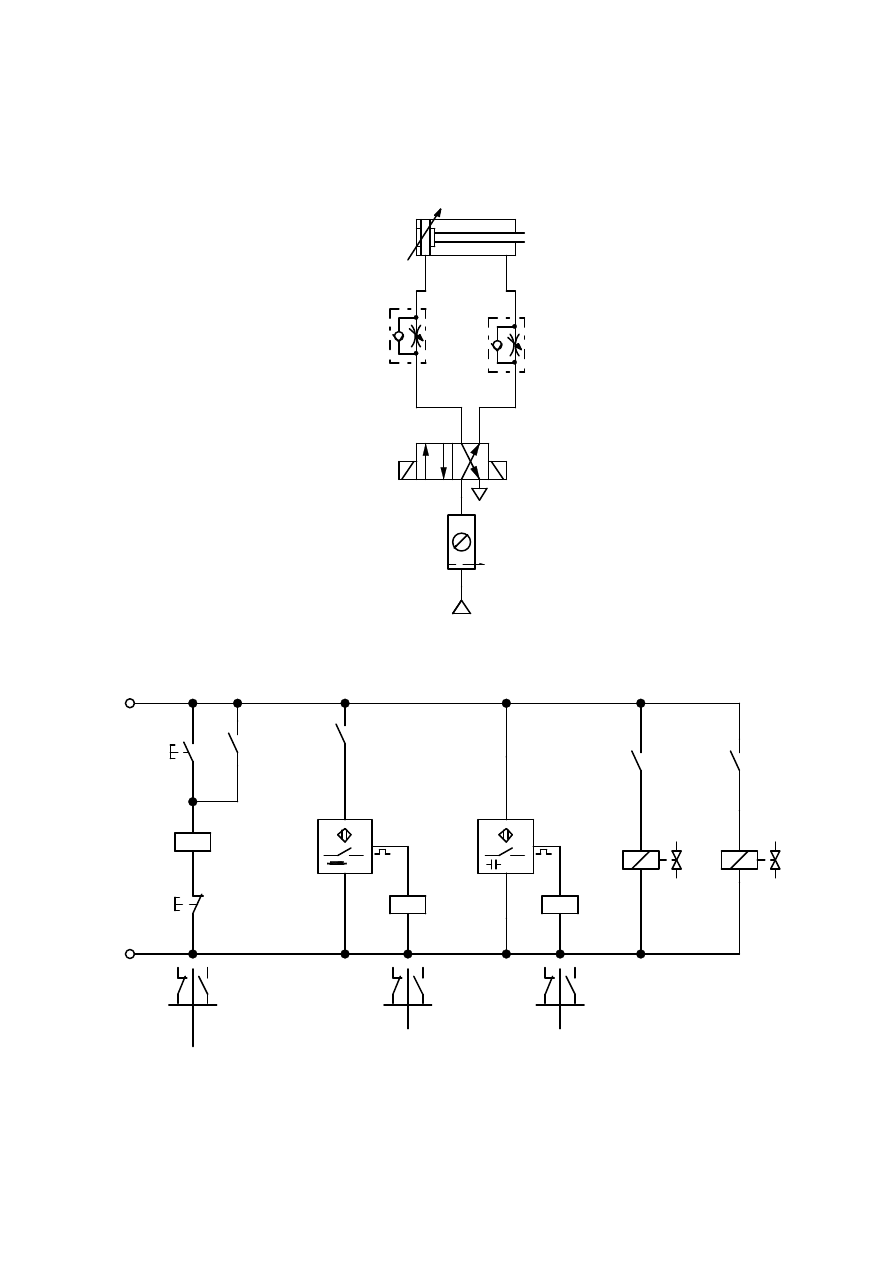
3.Schemat pneumatyczny i elektryczny układu sterowania.
B1
B2
4
2
1
3
Y1
Y2
0V
+24V
Y1
Y2
K1
K1
K1
K2
K3
K2
K3
S2_STOP
S1_START
5
0
%
5
0
%
1 A
1V1
1 C
1V2
1V3
1
2
3
5
7
8
2
3
7
8
Schemat Nr1
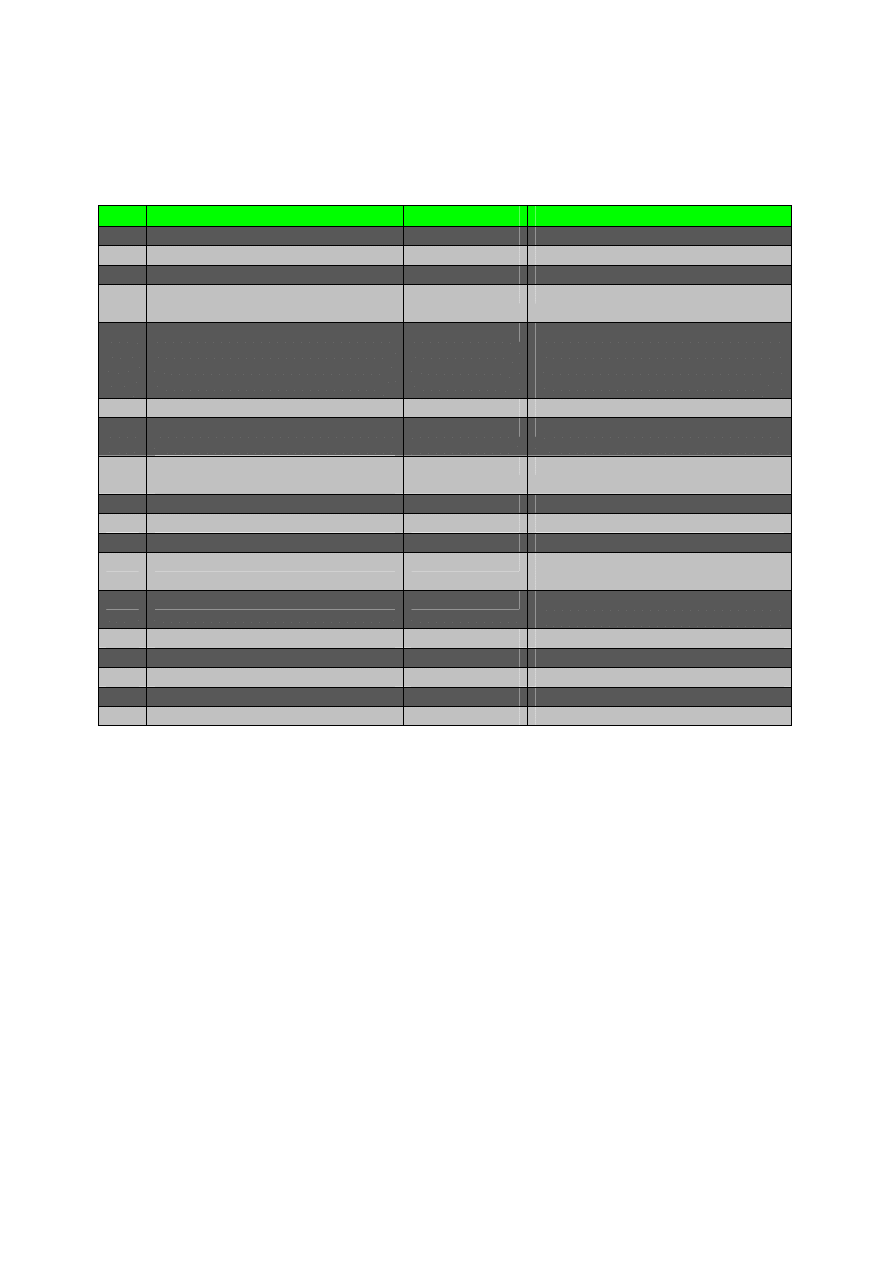
4.Wykaz urz
ą
dze
ń
potrzebnych do wykonania zadania.
Lp.
Nazwa elementu
Oznaczenie
Opis elementu
1
Siłownik pneumatyczny
1A
dwustronnego działania
2
Czujnik poło
ż
enia
B1
indukcyjny
3
Czujnik poło
ż
enia
B2
pojemno
ś
ciowy
4
Kompresor z zespołem
przygotowania powietrza
1C
6 bar
5
Zawór rozdzielaj
ą
cy 4/2
1V1
Bistabilny, sterowany
cewkami
elektromagnetycznymi
Y1, Y2
6
Zasilacz
-----
24V DC
7
Przeka
ź
nik zawór
elektromagnetycznego
Y1
24V DC
8
Przeka
ź
nik zawór
elektromagnetycznego
Y2
24V DC
9
Przeka
ź
nik
K1
24V DC
10 Przeka
ź
nik
K2
24V DC
11 Przeka
ź
nik
K3
24V DC
12 Przycisk
S1_START
Normalnie otwarty,
sterowany r
ę
cznie
13 Przycisk
S2_STOP
Normalnie zwarty,
sterowany r
ę
cznie
14 Stycznik
K1
Normalnie otwarty
15 Stycznik
K2
Normalnie otwarty
16 Stycznik
K3
Normalnie otwarty
17 Zawór dławi
ą
co zwrotny
1V2
Dławienie 50%
18 Zawór dławi
ą
co zwrotny
1V3
Dławienie 50%
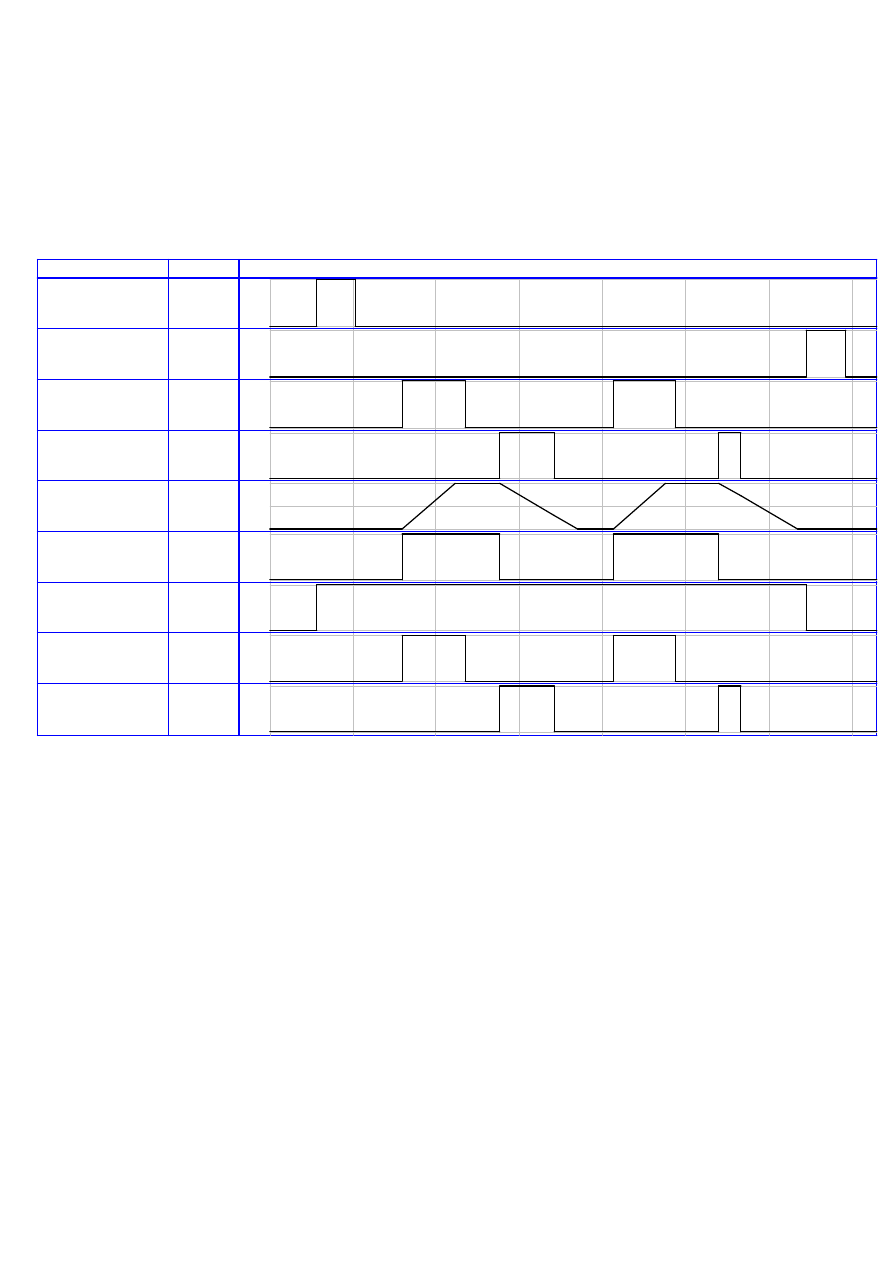
5.Diagram stanów
0
2
4
6
8
10
12
14
1
Pushbutton (make)
S1_START
1
Pushbutton (break)
S2_STOP
1
Inductive proximity switch
B1
1
Capacitive proximity switch
B2
mm
50
100
Double acting cylinder
1A
0
a
4/n Way Valve
1V1
1
Make switch
K1
1
Make switch
K2
1
Make switch
K3
Component Description Designation

6.Dokładny opis rozwi
ą
zania zadania.
Sterowanie pracy przeno
ś
nika z ruchom
ą
zwrotnic
ą
jest uruchamiany
ł
ą
cznikiem przyciskowym S1_START, który zamyka obwód pr
ą
dowy
przeka
ź
nika K1 z samopodtrzymaniem. W obwodzie 3 znajduje si
ę
,
poł
ą
czone szeregowo, zestyk K1 i indukcyjny czujnik poło
ż
eniowy B1.
Czujnik B1 jest uruchamiany w poło
ż
eniu pocz
ą
tkowym tłoczyska
siłownika przez magnes stały umieszczony w tłoczysku siłownika.
Zestyki K1 i B1 wł
ą
czaj
ą
przeka
ź
nik K2, który w obwodzie 7 wzbudza
elektromagnes Y1 zaworu rozdzielaj
ą
cego siłownika. Tłoczysko wysuwa
si
ę
w celu skierowania elementów metalowych na tor lewy. W momencie
wykrycia elementu z tworzywa sztucznego czujnik pojemno
ś
ciowy B2,
który zwiera obwód przeka
ź
nika K3. Zestyk przeka
ź
nika K3 wł
ą
cza
elektromagnes Y2 i tłoczysko wycofuje si
ę
. Cyk pracy powtarza tak
długo, a
ż
zostanie wci
ś
ni
ę
ty ł
ą
cznik przyciskowy S2_STOP, który
powoduje przerwanie pracy i powrotu siłownika do poło
ż
enia
pocz
ą
tkowego.
Wyszukiwarka
Podobne podstrony:
więcej podobnych podstron