











Badanie silnika synchronicznego z magnesami trwałymi PMSM
1. Cel i zakres ćwiczenia
Celem ćwiczenia jest przebadanie układu napędowego z silnikiem synchronicznym
z magnesami trwałymi PMSM (ang. Permament Magnet Synchronous Motor).
Zakres ćwiczenia obejmuje zapoznanie się z mikroprocesorowym układem sterowania
wektorowego silnika PMSM, wyznaczenie charakterystyk mechanicznych oraz wpływu nastaw
regulatorów na właściwości dynamiczne napędu.
2. Wprowadzenie teoretyczne
Silnik
synchroniczny
PMSM
naleŜy
do rodziny maszyn wzbudzanych magnesami
trwałymi. Od bezszczotkowego silnika prądu
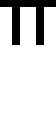
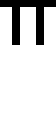
stałego BLDC róŜni się on rozkładem indukcji pola
magnetycznego w szczelinie powietrznej (rys. 1).
Sinusoidalny rozkład pola prowadzi do uzyskania
sinusoidalnej siły elektromotorycznej rotacji, praca
silnika z maksymalnym momentem wymaga więc
zasilania uzwojeń stojana trójfazowymi prądami
sinusoidalnymi. Widoczne jest podobieństwo
maszyny
bezszczotkowej
z
sinusoidalnym
rozkładem pola do maszyny synchronicznej
o wzbudzeniu elektromagnetycznym. Uzwojenie
stojana (twornika) jest w obu przypadkach
trójfazowe i rozmieszczone w Ŝłobkach, natomiast
znajdujące się w wirniku klasycznej maszyny
synchronicznej uzwojenie wzbudzenia zostało
zastąpione magnesami trwałymi. W odróŜnieniu od
silnika BLDC układ sterowania bezszczotkowego
silnika synchronicznego wymaga ciągłego pomiaru
połoŜenia wirnika. Podobieństwo do klasycznej
Rys. 1. Przebiegi czasowe indukcji
maszyny synchronicznej umoŜliwia wykorzystanie
magnetycznej B, siły elektromotorycznej
w
układzie
sterowania
podobnych
metod,
E oraz prądu I
odpowiednio uwzględniających stały strumień
wzbudzenia pochodzący od magnesów trwałych. PoniewaŜ sinusoidalna fala prądu w silniku PMSM moŜe być dokładniej wytworzona, w stosunku do prostokątnego przebiegu prądu w silniku
BLDC, osiągany moment elektromagnetyczny ma gładszy przebieg czasowy. Wraz z pozostałymi zaletami umoŜliwia to zastosowanie silnika synchronicznego z magnesami trwałymi
w serwonapędach o najwyŜszych wymaganiach dynamicznych i dokładnościowych.
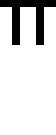
Ogólną strukturę układu zasilania i sterowania silnika PMSM pracującego jako serwonapęd
przedstawia rys. 2. Uzwojenia stojana zasilane jest przez przemiennik częstotliwości z modulacją szerokości impulsów o budowie identycznej z przemiennikami wykorzystywanymi do zasilania silników indukcyjnych i synchronicznych. RóŜnica polega na tym, Ŝe modulator PWM potrzebuje
informacji o aktualnym połoŜeniu wirnika (i jednocześnie wektora strumienia wzbudzenia).
Do pomiaru kąta połoŜenia wirnika wykorzystuje się np. enkoder absolutny, który słuŜy równieŜ
do pomiaru prędkości wirnika. Układ sterowania składa się, podobnie jak w innych układach 1




































napędowych, z dwóch warstw: podporządkowanej, odpowiedzialnej za sterowanie wielkościami elektromagnetycznymi (momentem elektromagnetycznym i strumieniem skojarzonym stojana) oraz
warstwy nadrzędnej.
Rys. 2 Struktura układu zasilania i sterowania silnika PMSM
Nadrzędna pętla sterowania ma za zadanie regulację prędkości napędu. Sygnałami
wyjściowymi są prądy zadane w osiach q i d. Wartość prądu w osi q wynika z wymaganego momentu elektromagnetycznego i jest ustawiana przez regulator prędkości. Składową prądu w osi d moŜna wpływać na strumień. W zastosowaniach serwonapędowych występuje regulator kąta
połoŜenia wirnika, który wypracowuje wartość zadaną dla regulatora prędkości. PoniewaŜ aplikacja przemysłowa często zawiera większą liczbę współpracujących napędów, nadrzędny zadajnik kąta połoŜenia podaje Ŝądane wartości kąta dla kilku silników.
Moment elektromagnetyczny maszyny synchronicznej moŜna wyrazić na kilka sposobów
za pomocą wektorów strumienia skojarzonego wirnika i stojana oraz prądu stojana. W związku z tym opracowanych zostało kilka strategii sterowania, róŜniących się kryteriami optymalizacji statycznej. Cztery najczęściej spotykane strategie to:
1) zachowanie stałego kąta mocy δ = π/2,
2) zachowanie stałego współczynnika mocy cos φ = 1,
3) zachowanie stałej amplitudy strumienia skojarzonego stojana Ψ s = const,
4) maksymalizacja stosunku momentu elektromagnetycznego do amplitudy prądu stojana.
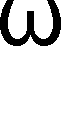
Najczęściej wykorzystywana jest strategia I. Z załoŜenia stałego kąta mocy wynika, Ŝe prąd
stojana ma tylko składową w osi q (rys. 3). WyraŜenie na moment elektromagnetyczny przyjmuje wtedy postać:
3
M =
⋅ pΨ I .
e
f
s
2
Przy załoŜeniu stałego strumienia magnesów trwałych otrzymuje się liniową zaleŜność
momentu od amplitudy prądu stojana. Całkowity strumień stojana Ψ s jest sumą strumienia magnesów Ψ f i strumienia wytworzonego przez prąd stojana Ψ i. Na rys. 3 koniec wektora strumienia porusza się po linii kropkowanej. Wymuszając ujemną wartość prądu w osi q moŜna odwzbudzić silnik. UmoŜliwia to pracę powyŜej wartości prędkości znamionowej, kosztem
maksymalnego momentu.
2
Zaletą II strategii sterowania jest to, Ŝe
całkowita
moc
pozorna
dostarczana
przez
przekształtnik jest zamieniana na moc czynną
w silniku. W napędach duŜych mocy jest to poŜądana
j q
właściwość. Wadą tej strategii jest nieliniowo
opadająca charakterystyka momentu wytwarzanego
przez silnik od prądu stojana. W III strategii
isq
utrzymywana jest stała amplituda strumienia stojana.
Moment elektromagnetyczny rośnie w przybliŜeniu
liniowo z wzrostem prądu stojana, ale dla takich
samych wartości prądu osiąga mniejsze wartości, niŜ
Ψ s
δ
w strategii I. IV strategia ma na celu najlepsze
η
Ψ
wykorzystanie silnika i falownika, czyli otrzymanie
i
największego momentu dla danego prądu stojana.
Porównując strategię I z IV otrzymuje się większe
Ψ f
d
wartości momentu (przy tych samych prądach) dla
strategii IV. RóŜnice są wyraźne tylko dla znacznej
róŜnicy indukcyjności w osiach d i q. Ponadto układy
regulacji prądów w osiach d i q są ze sobą sprzęŜone,
co negatywnie odbija się na dynamice napędu.
Niezale
Rys. 3. PołoŜenie wektorów
Ŝnie od przyjętej strategii układy
sterowania ró
strumieni i prądu w I strategii
Ŝnią się sposobem sterowania momentem
elektromagnetycznym i strumieniem magnetycznym.
sterowania δ = π/2
MoŜna je podzielić na dwie podstawowe kategorie:
• Sterowanie z pośrednim wektorowym
sterowaniem prądem stojana,
• Bezpośrednie
sterowanie
momentem
i strumieniem (DTC).
Układy ze sterowaniem wektorowym prądu mają za zadanie regulację prądów fazowych
z zachowaniem właściwej orientacji względem połoŜenia wirnika lub wybranego wektora
strumienia, zaleŜnie od przyjętej strategii. Regulatory słuŜą do zapewnienia odpowiedniej dynamiki prądu i jego sinusoidalnego charakteru. Poszczególne rozwiązania róŜnią się układem
współrzędnych, w którym dokonuje się regulacji i strukturą regulatora. Schematy przykładowych układów przedstawiają rysunki 4-5. W pierwszym przypadku regulacja prądu odbywa się
w nieruchomym, trójfazowym układzie A,B,C za pomocą dwupołoŜeniowych, nieliniowych regulatorów. Wartości zadane prądów w osiach d i q muszą zostać najpierw poddane transformacji do nieruchomego układu trójfazowego. W rozwiązaniu przedstawionym na rys. 4 wykorzystano liniowe regulatory typu PI, pracujące w wirującym układzie d,q. Wobec tego równieŜ prądy mierzone muszą zostać przetransformowane do tego układu.
3














































































Rys. 4. Układ wektorowej regulacji prądu z regulatorami histerezowymi
Rys. 5. Układ regulacji serwonapędu z liniowymi regulatorami prądów w osiach d i q
Alternatywnym rozwiązaniem układu regulacji jest metoda bezpośredniego sterowania
momentem i strumieniem. Jak sama nazwa wskazuje nie są w niej wymagane pętle regulacji prądu.
Na podstawie wskazań nieliniowych regulatorów strumienia i momentu oraz aktualnego połoŜenia
wirnika z tabeli przełączeń wybierane są optymalne wektory napięcia zasilającego uzwojenia stojana.
W porównaniu do silnika BLDC silnik PMSM cechuje się lepszymi właściwościami
dynamicznymi i mniejszymi tętnieniami momentu. Główne zastosowanie to serwonapędy
o najwyŜszych wymaganiach dokładnościowych.
4
Ćwiczenie odbywa się na uniwersalnym stanowisku laboratoryjnym, umoŜliwiającym
badanie silnika bezszczotkowego, zarówno z trapezową (BLDC) jak i z sinusoidalną (PMSM) siłą
elektromotoryczną rotacji. Ponadto na stanowisku znajdują się: silnik prądu stałego i silnik asynchroniczny, które mogą słuŜyć za obciąŜenie silnika bezszczotkowego. Badany silnik zasilany jest z baterii akumulatorów trakcyjnych poprzez dedykowany przekształtnik energoelektroniczny o strukturze falownika napięcia z modulacją szerokości impulsów. Układ sterowania wektorowego
jest zrealizowany z wykorzystaniem procesora sygnałowego.
4. Przebieg ćwiczenia
Program ćwiczenia obejmuje przebadanie właściwości statycznych i dynamicznych układu
napędowego z silnikiem synchronicznym z magnesami trwałymi. NaleŜy wyznaczyć
charakterystyki mechaniczne n = f (I), zaleŜność momentu elektromagnetycznego w funkcji prądu
stojana M = f (I) oraz zarejestrować wybrane przebiegi napięć i prądów silnika.
W celu przebadania właściwości dynamicznych napędu naleŜy zaobserwować przebiegi
prędkości i prądu podczas rozruchu i nawrotu oraz podczas skokowej zmiany momentu obciąŜenia.
5. Sprawozdanie
W
sprawozdaniu
z
przeprowadzonego
ćwiczenia
naleŜy
zamieścić
wyniki
przeprowadzonych pomiarów (zgodnie z poleceniem prowadzącego, w postaci tabelarycznej
i wykreślnej) oraz otrzymane przebiegi czasowe. Wyniki badań, np. róŜnice w odniesieniu do modelu teoretycznego, naleŜy skomentować we wnioskach.
5