
TEMAT 4
Damian Nowak
Gr. 5

Sprawozdanie techniczne
I.
Dane formalno-prawne
1.
ZLECENIODAWCA: Wydział Geodezji Górniczej i Inżynierii Środowiska Akademii
Górniczo-Hutniczej w Krakowie
2.
WYKONAWCA: Damian Nowak
3.
PRZEDMIOT ZLECENIA: Ustalenie dokładności pomiaru osnowy i tyczenia obiektu
z uwzględnieniem tolerancji budowlanych (na przykładzie przęseł mostu)
4.
TERMIN WYKONANIA ZLECENIA: 24.12.2010
II.
Czynności obliczeniowe
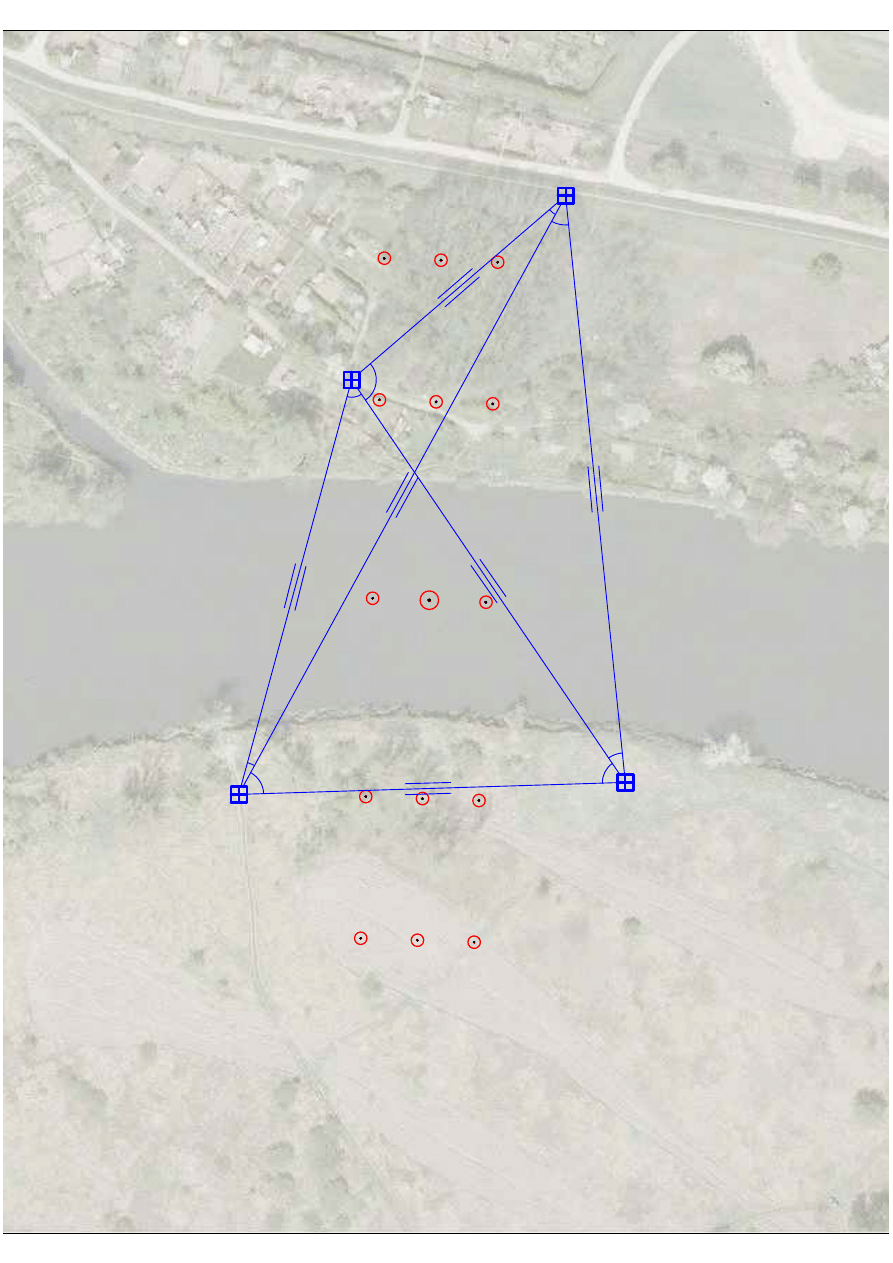
Czynności obliczeniowe wykonane zostały w oparciu o dane uzyskane z dokumentacji
projektowej mostu (współrzędne filarów) i opracowań kameralnych (obserwacje kątowo-liniowe
na podstawie posiadanych współrzędnych). Do obliczeń wykorzystano programy komputerowe:
Microsoft Excel oraz FlatNET.
Obliczenia wykonano w 2 etapach:
1.
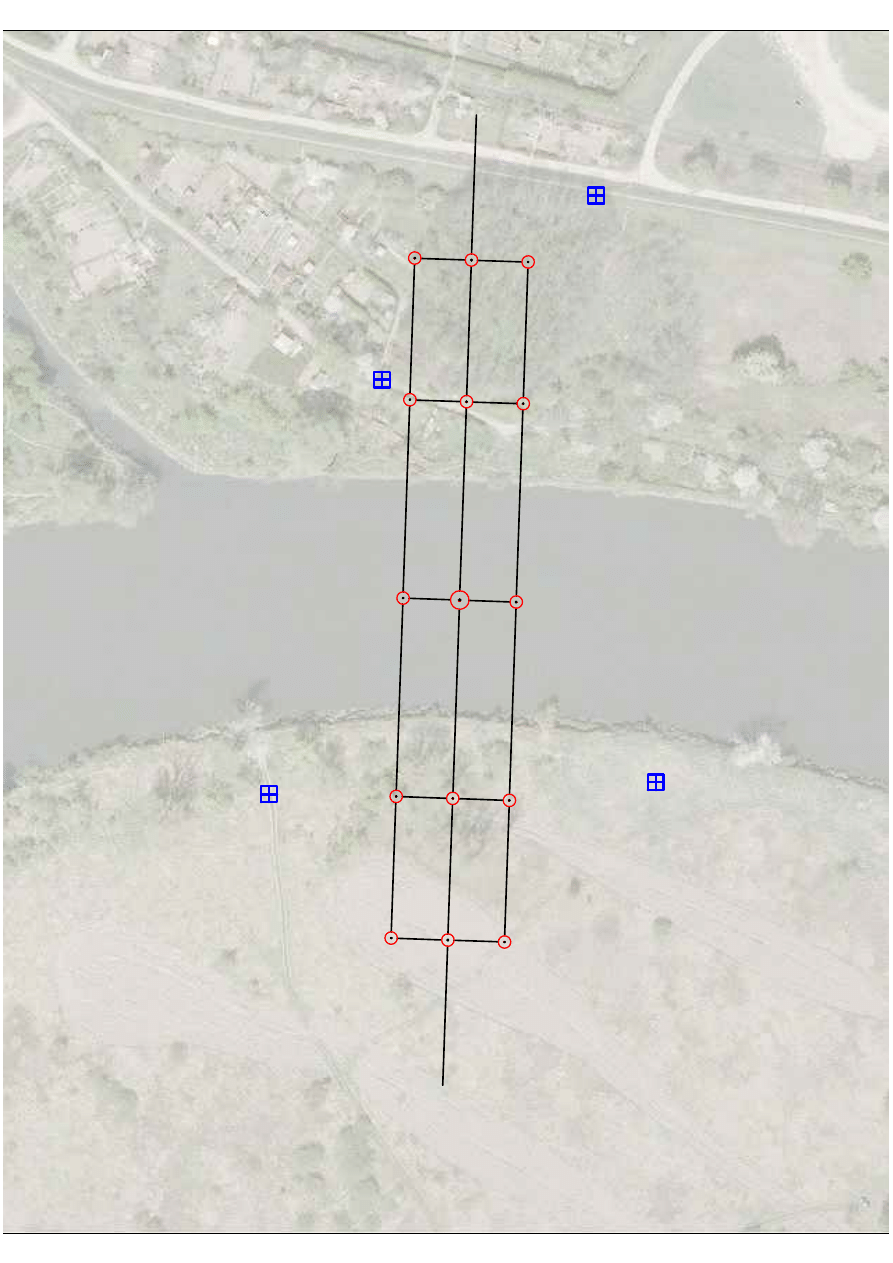
Obliczenie błędu wytyczenia najgorzej wyznaczonego boku w obiekcie przy
uwzględnianiu jedynie błędów osnowy.
2.
Obliczenie błędu wytyczenia najgorzej wyznaczonego boku w obiekcie przy
uwzględnianiu jedynie błędów tyczenia.
Za każdym razem program wyrównywał sieć wraz z obliczeniem elips błędu średniego.
Praca w Microsoft Excel polegała na wykonaniu tych samych obliczeń dla etapu 2. Uzyskano
wyniki zgodne.
III.
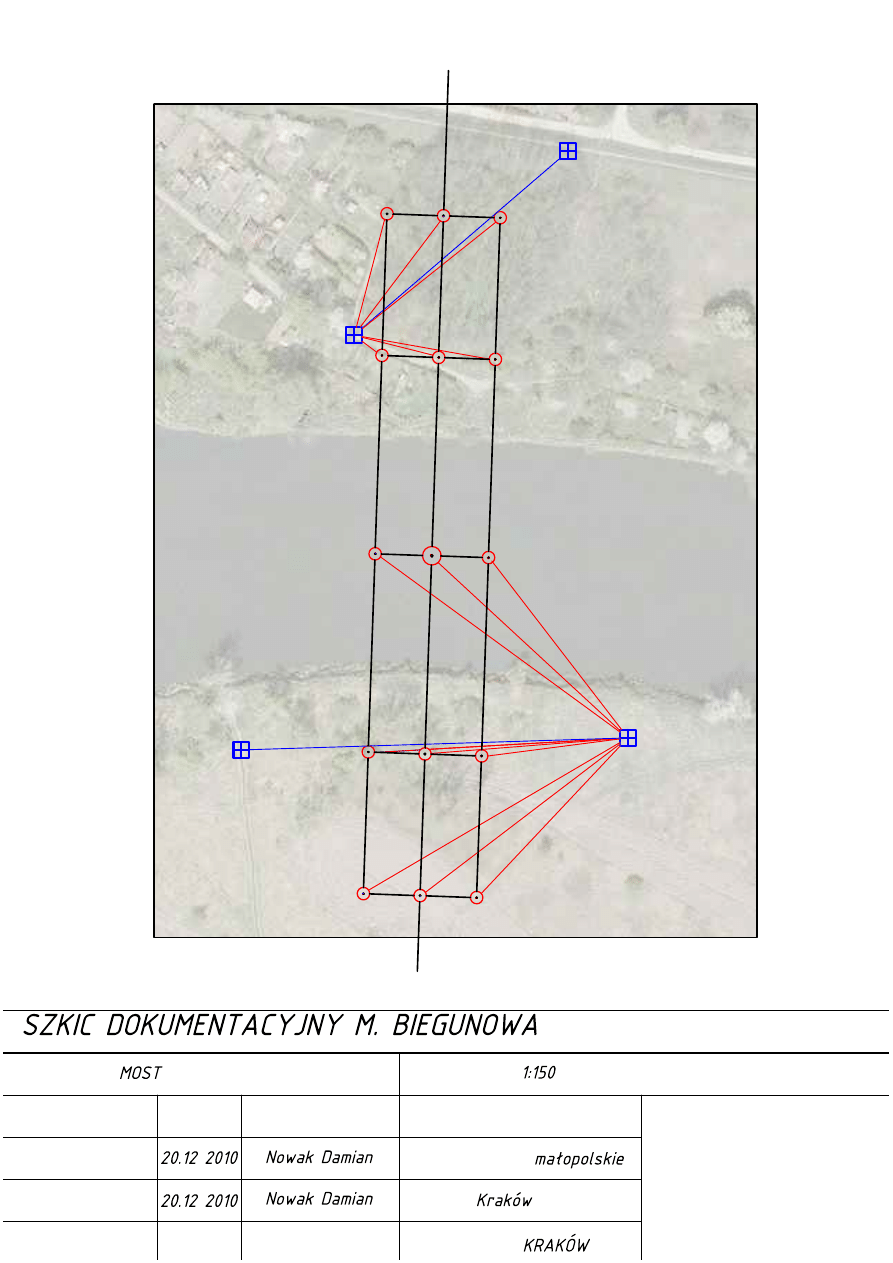
Opracowanie wyników
Wyniki obliczeń zostały zaprezentowane graficznie pod postacią szkiców, raportów z programu
FlatNET, wykazu współrzędnych, obliczeń z arkusza kalkulacyjnego Excel i zostały załączone
do niniejszego operatu.
Do operatu został także dołączony prospekt z urządzenia pomiarowego – SOKKIA NET1
M
0
oraz M
0-realizacyjne
zostały dobrane w sposób optymalny do wytyczenia podpór mostu z
uwzględnieniem posiadanego sprzętu i tolerancji budowlanych.
Tolerancja budowlana wynosiła dL = 40 mm
Maksymalne dopuszczalne błędy (dla geodetów) dL
G
= 28.28 mm
Błąd tyczenia mt = 14.14 mm
Stopień trudności wykonywania pomiaru r = 2
M
0
= 2
M
0-realizacyjne
= 9.48

Błąd kąta podczas pomiarów osnowy m
α
= 6 [cc]
Błąd długości podczas pomiarów osnowy m
d
= 2 [mm] + 2 ppm
Błąd kąta podczas tyczenia m
α
= 28.4 [cc]
Błąd długości podczas tyczenia m
d
= 9.4 [mm]
Błąd długości (OSN2-30) podczas tyczenia m
d
= 8.1 [mm]
Błąd długości (OSN3-3112) podczas tyczenia m
d
= 13.2 [mm]
WYKAZ WSPÓŁRZĘDNYCH
X[m]
Y[m]
OSN1
5547708.10 7427583.30
OSN2
5547645.30 7427503.10
OSN3
5547501.80 7427588.30
OSN4
5547502.70 7427459.70
30
5547637.341 7427534.112
3112
5547567.500 7427529.400

Schemat postępowania w arkuszu kalkulacyjnym Excel
1. Obliczenie długości między punktami
P
K
D [mm]
OSN1
OSN2
101862.1
OSN2
30
32017.02
OSN4
OSN3
128603.1
OSN3
3112
88236.61
2. Obliczenie azymutów między punktami
P
K
Azymut [cc]
OSN2
30
115.9932049
OSN3
3112
353.4708863
3112
30
4.288617381
3. Obliczenie kolejno macierzy – A, A’, A
T
pA, (A
T
pA)
-1
, f (wykorzystując
m
α
= 10 [cc], m
d1
= 0.85 [mm], m
d2
= 1.39 [mm])
A
dX31
dY31
dX3112
dY3112
alfa1
-19.25963
-4.94284
0
0
d1
-0.24859
0.96861
0
0
alfa2
0
0
4.81613
5.37215
d2
0
0
0.74459
-0.66752
A'
-1.92596
-0.49428
0
0
-0.29245
1.13954
0
0
0
0
0.48161
0.53721
0
0
0.53568
-0.48023
AtpA
3.79486
0.61871
0
0
0.61871
1.54287
0
0
0
0
0.51890
0.00148
0
0
0.00148
0.51922
AtpA-1
0.28195
-0.11306
0
0
-0.11306
0.69348
0
0
0
0
1.92717
-0.00549
0
0
-0.00549
1.92597
f
-0.99773
-0.06731
0.99773
0.06731
4. Obliczenie fQf
T
fQf
T
=
2.19 mm
2
√
= 1.49 mm
OSN1
OSN2
OSN3
OSN4
18
31
17
14
30
13
11
3112
12
15
32
16
20
33
19
- 70.000 -
- 70.000 -
- 50.000 -
- 50.000 -
- 20.000 -
- 20.000 -
SKALA 1:150
OSN1
OSN2
OSN3
OSN4
18
31
17
14
30
13
11
3112
12
15
32
16
20
33
19
SKALA 1:150
OSN1
OSN2
OSN3
OSN4
18
31
17
14
30
13
11
3112
12
15
32
16
20
33
19
Obiekt:
Data
podpis
Gmina
Skala szkicu:

F l a t N E T Niedziela, 13.2.2011
WYROWNANIE SCISLE SIECI POZIOMYCH (uwzględnienie tylko błędów tyczenia)
===============================================================================
Obiekt :MOST
Opis :analiza
Blad sredni typowego spostrzezenia m0 =1.000000000
Wykaz punktow stalych w sieci
-------------------------------------------------------------------------------
Numer X Y
OSN4 5547502.70000 7427459.70000
OSN1 5547708.10000 7427583.30000
OSN2 5547645.30000 7427503.10000
OSN3 5547501.80000 7427588.30000
Wykaz wspolrzednych wyrownanych wraz z poprawkami
-------------------------------------------------------------------------------
Numer X_wyr Y_wyr dX dY
3112 5547567.50000 7427529.40000 0.00000 0.00000
30 5547637.34100 7427534.11200 0.00000 0.00000
Wykaz wspolrzednych wyrownanych wraz z bledami srednimi
-------------------------------------------------------------------------------
Numer X_wyr Y_wyr MX MY MP
3112 5547567.50000 7427529.40000 0.00139 0.00139 0.00197
30 5547637.34100 7427534.11200 0.00053 0.00084 0.00100
Wykaz obserwacji katowych [grady]
-------------------------------------------------------------------------------
Lewy Centr Prawy Kat_pom Poprawka Kat_wyr Blad v/m
OSN4 OSN3 3112 53.02536 -0.00000 53.02536 0.00100 -0.001
OSN1 OSN2 30 58.28481 0.00000 58.28481 0.00100 0.001
Wykaz obserwacji liniowych
-------------------------------------------------------------------------------
Poczatek Koniec Odle_pom Poprawka Odle_wyr Blad v/m
OSN2 30 32.01702 0.00000 32.01702 0.00086 0.006
OSN3 3112 88.23661 0.00000 88.23661 0.00140 0.002
Wykaz obserwacji azymutalnych [grady]
-------------------------------------------------------------------------------
Poczatek Koniec Azym_pom Poprawka Azym_wyr Blad v/m
OSN4 OSN1 34.48620 -0.00005 34.48615 0.00000 -45.002
Statyska sieci
-------------------------------------------------------------------------------

Liczba punktow stalych =4
Liczba punktow wyrownanych =2
Liczba obserwacji katowych =2
Liczba obserwacji liniowych =2
Liczba obserwacji azymutalnych =1
Ilosc niewiadomych =4
Ilosc obserwacji =5
Ilosc obserwacji nadliczbowych =1
Wspolczynnik r =0.8000000000
Pewnosc sieci P=1.2500000000
Najgorzej okreslony punkt po wyrownaniu :
Numer X_wyr Y_wyr MX MY MP
3112 5547567.50000 7427529.40000 0.00139 0.00139 0.00197
Punkt o najmniej dokladnej wspolrzednej X :
Numer X_wyr Y_wyr MX MY MP
3112 5547567.50000 7427529.40000 0.00139 0.00139 0.00197
Punkt o najmniej dokladnej wspolrzednej Y :
Numer X_wyr Y_wyr MX MY MP
3112 5547567.50000 7427529.40000 0.00139 0.00139 0.00197
Pomierzona odleglosc o najwiekszym bledzie srednim :
Poczatek Koniec Odle_pom Poprawka Odle_wyr Blad
OSN3 3112 88.23661 0.00000 88.23661 0.00140
Pomierzony kat o najwiekszym bledzie srednim :
Centr Lewy Prawy Kat_pom Poprawka Kat_wyr Blad
OSN3 OSN4 3112 53.02536 -0.00000 53.02536 0.00100
Histogram rozkladu zrownowazonych poprawek do obserwacji
-------------------------------------------------------------------------------
Ponizej -3:########## 20% (1 obs.)
: 0% (0 obs.)
-2: 0% (0 obs.)
: 0% (0 obs.)
-1: 0% (0 obs.)
: 0% (0 obs.)
-0:########## 20% (1 obs.)
0:############################## 60% (3 obs.)
: 0% (0 obs.)
1: 0% (0 obs.)
: 0% (0 obs.)
2: 0% (0 obs.)
: 0% (0 obs.)
Powyzej 3: 0% (0 obs.)

F l a t N E T Niedziela, 13.2.2011
ELIPSY BLEDU SREDNIEGO
===============================================================================
Obiekt :MOST
Opis :analiza
Numer X_wyr Y_wyr Polos duza Polos mala Azymut
3112 5547567.50000 7427529.40000 0.001400 0.001387 153.47088
30 5547637.34100 7427534.11200 0.000860 0.000503 115.99320
F l a t N E T Niedziela, 13.2.2011
OBLICZENIE BLEDU SREDNIEGO DOWOLNEGO BOKU
===============================================================================
Obiekt :MOST
Opis :analiza
Nazwa X Y
30 5547637.34100 7427534.11200
3112 5547567.50000 7427529.40000
Odleglosc : 69.99978 Azymut : 204.28862
M_odle : 0.00149 M_azym : 0.00149
M_odle/odle : 1/47069 M_azym [m] : 0.00163 [m]

F l a t N E T Niedziela, 13.2.2011
WYROWNANIE SCISLE SIECI POZIOMYCH (uwzględnienie tylko błędów osnowy)
===============================================================================
Obiekt :MOSTBL~1
Opis :analiza
Blad sredni typowego spostrzezenia m0 =1.000000000
Wykaz punktow stalych w sieci
-------------------------------------------------------------------------------
Numer X Y
OSN4 5547502.70000 7427459.70000
Wykaz wspolrzednych wyrownanych wraz z poprawkami
-------------------------------------------------------------------------------
Numer X_wyr Y_wyr dX dY
OSN1 5547708.10000 7427583.30000 0.00000 0.00000
OSN2 5547645.30000 7427503.10000 0.00000 0.00000
OSN3 5547501.80000 7427588.30000 0.00000 0.00000
3112 5547567.50000 7427529.40000 0.00000 0.00000
30 5547637.34100 7427534.11200 0.00000 0.00000
Wykaz wspolrzednych wyrownanych wraz z bledami srednimi
-------------------------------------------------------------------------------
Numer X_wyr Y_wyr MX MY MP
OSN1 5547708.10000 7427583.30000 0.00083 0.00050 0.00097
OSN2 5547645.30000 7427503.10000 0.00084 0.00055 0.00100
OSN3 5547501.80000 7427588.30000 0.00049 0.00082 0.00095
3112 5547567.50000 7427529.40000 0.00026 0.00074 0.00079
30 5547637.34100 7427534.11200 0.00079 0.00055 0.00096
Wykaz obserwacji katowych [grady]
-------------------------------------------------------------------------------
Lewy Centr Prawy Kat_pom Poprawka Kat_wyr Blad v/m
OSN1 OSN2 30 58.28480 0.00001 58.28481 0.00000 3.522
OSN3 OSN1 OSN2 59.25100 0.00004 59.25104 0.00023 0.162
OSN4 OSN3 OSN1 98.01180 0.00003 98.01183 0.00025 0.123
OSN2 OSN4 OSN3 81.63720 -0.00002 81.63718 0.00024 -0.097
OSN1 OSN2 OSN4 161.10000 -0.00005 161.09995 0.00026 -0.177
OSN4 OSN3 3112 53.02536 -0.00000 53.02536 0.00000 -0.181

Wykaz obserwacji liniowych
-------------------------------------------------------------------------------
Poczatek Koniec Odle_pom Poprawka Odle_wyr Blad v/m
OSN2 30 32.01700 0.00002 32.01702 0.00002 1.186
OSN4 OSN3 128.60300 0.00016 128.60316 0.00082 0.190
OSN3 OSN1 206.36100 -0.00042 206.36058 0.00089 -0.473
OSN3 3112 88.23661 0.00000 88.23661 0.00002 0.117
OSN1 OSN2 101.86206 0.00000 101.86206 0.00091 0.005
OSN2 OSN4 149.05812 -0.00000 149.05812 0.00093 -0.005
Wykaz obserwacji azymutalnych [grady]
-------------------------------------------------------------------------------
Poczatek Koniec Azym_pom Poprawka Azym_wyr Blad v/m
OSN4 OSN1 34.48620 -0.00005 34.48615 0.00000 -21.429
Statyska sieci
-------------------------------------------------------------------------------
Liczba punktow stalych =1
Liczba punktow wyrownanych =5
Liczba obserwacji katowych =6
Liczba obserwacji liniowych =6
Liczba obserwacji azymutalnych =1
Ilosc niewiadomych =10
Ilosc obserwacji =13
Ilosc obserwacji nadliczbowych =3
Wspolczynnik r =0.7692307692
Pewnosc sieci P=1.3000000000
Najgorzej okreslony punkt po wyrownaniu :
Numer X_wyr Y_wyr MX MY MP
OSN2 5547645.30000 7427503.10000 0.00084 0.00055 0.00100
Punkt o najmniej dokladnej wspolrzednej X :
Numer X_wyr Y_wyr MX MY MP
OSN2 5547645.30000 7427503.10000 0.00084 0.00055 0.00100
Punkt o najmniej dokladnej wspolrzednej Y :
Numer X_wyr Y_wyr MX MY MP
OSN3 5547501.80000 7427588.30000 0.00049 0.00082 0.00095
Pomierzona odleglosc o najwiekszym bledzie srednim :
Poczatek Koniec Odle_pom Poprawka Odle_wyr Blad
OSN2 OSN4 149.05812 -0.00000 149.05812 0.00093
Pomierzony kat o najwiekszym bledzie srednim :
Centr Lewy Prawy Kat_pom Poprawka Kat_wyr Blad
OSN2 OSN1 OSN4 161.10000 -0.00005 161.09995 0.00026

Pomierzony azymut o najwiekszym bledzie srednim :
Poczatek Koniec Azym_pom Poprawka Azym_wyr Blad
OSN4 OSN1 34.48620 -0.00005 34.48615 0.00000
Histogram rozkladu zrownowazonych poprawek do obserwacji
-------------------------------------------------------------------------------
Ponizej -3:#### 8% (1 obs.)
: 0% (0 obs.)
-2: 0% (0 obs.)
: 0% (0 obs.)
-1: 0% (0 obs.)
: 0% (0 obs.)
-0:################### 38% (5 obs.)
0:################### 38% (5 obs.)
: 0% (0 obs.)
1:#### 8% (1 obs.)
: 0% (0 obs.)
2: 0% (0 obs.)
: 0% (0 obs.)
Powyzej 3:#### 8% (1 obs.)
F l a t N E T Niedziela, 13.2.2011
ELIPSY BLEDU SREDNIEGO
===============================================================================
Obiekt :MOSTBL~1
Opis :analiza
Numer X_wyr Y_wyr Polos duza Polos mala Azymut
OSN1 5547708.10000 7427583.30000 0.000970 0.000004 34.48615
OSN2 5547645.30000 7427503.10000 0.000952 0.000319 33.79201
OSN3 5547501.80000 7427588.30000 0.000858 0.000416 78.05593
3112 5547567.50000 7427529.40000 0.000741 0.000260 96.16858
30 5547637.34100 7427534.11200 0.000908 0.000308 35.77510
F l a t N E T Niedziela, 13.2.2011
OBLICZENIE BLEDU SREDNIEGO DOWOLNEGO BOKU
===============================================================================
Obiekt :MOSTBL~1
Opis :analiza
Nazwa X Y
30 5547637.34100 7427534.11200
3112 5547567.50000 7427529.40000
Odleglosc : 69.99978 Azymut : 204.28862
M_odle : 0.00089 M_azym : 0.00080
M_odle/odle : 1/78661 M_azym [m] : 0.00088 [m]
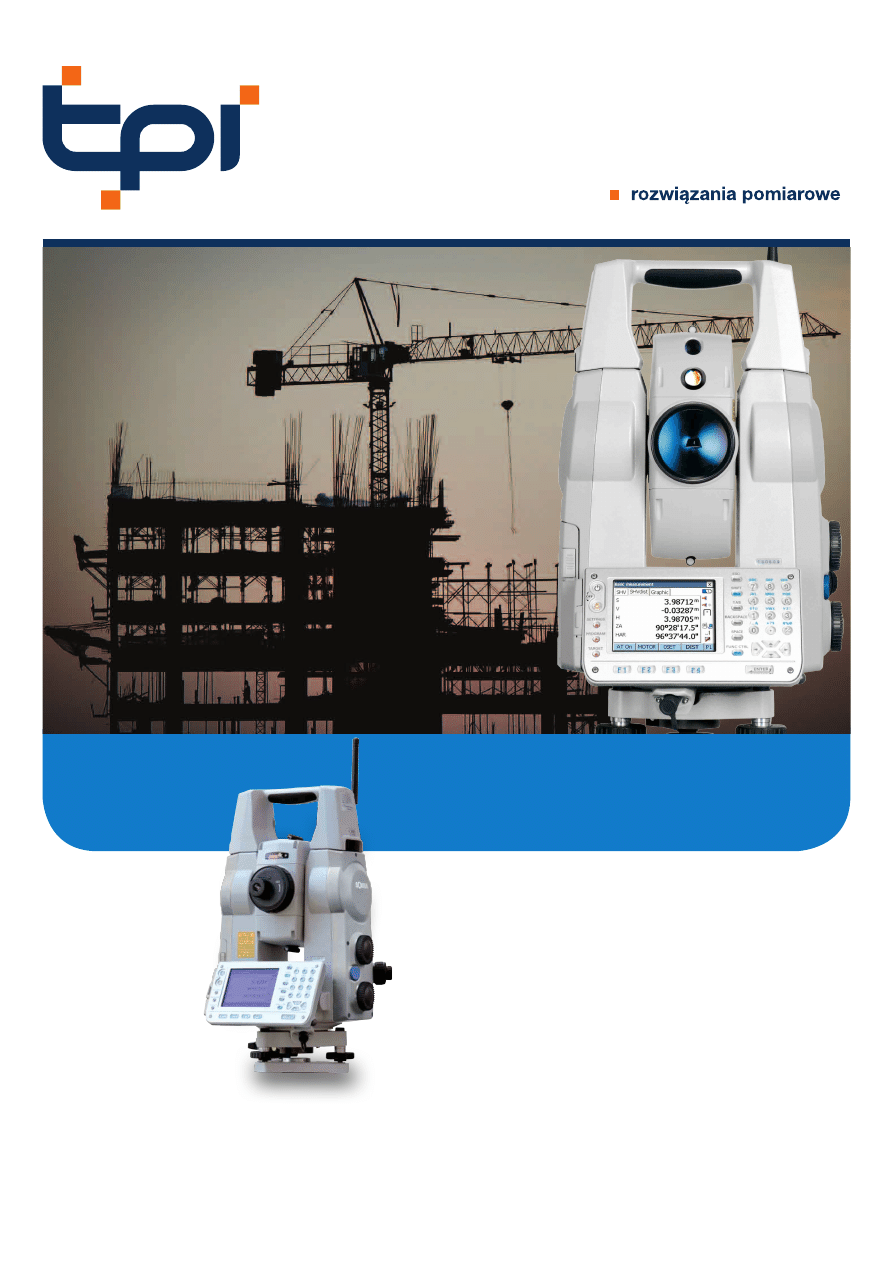
PRZEMYSŁOWY
TACHIMETR
ZMOTORYZOWANY NET
Wysokie parametry
dokładności wyznaczania
kątów i odległości
n
dokładność pomiaru kąta 0,5˝ i odległości
0,5 mm + 1 ppm
n
wydajne serwomotory z opcjami wyszukiwania
i śledzenia celu do monitoringu i skanowania
obiektów budowlanych
n
system operacyjny Windows ze specjalnym
oprogramowaniem 3-DIM lub 3-DIM Observer
n
duży kolorowy ekran dotykowy z podświetlaną
klawiaturą do wygodnej pracy w każdym miejscu
n
wszechstronna wymiana danych za pomocą
portów USB, miniUSB, RS-232, kart CF
n
bezprzewodowa komunikacja Bluetooth
z urządzeniami zewnętrznymi

0.5˝ dokładności pomiaru kątów
Zaawansowana technologia kalibracji IACS
(Independent Angle Calibration System) i nowoczesny
system odczytowy RAB (RAndom Biderectional)
zapewniają najwyższą precyzję pomiaru kątów w tej
klasie instrumentów i i umożliwiają realizację prac
z niespotykaną dotąd dokładnością.
Automatyzacja pomiarów
Zastosowanie serwomotorów pozwoliło na wykorzystanie
tachimetru NET do wykonywania bezosobowego
i ciągłego monitoringu obiektów budowlanych. Funkcje
wyszukiwania i śledzenia pryzmatu służą do prowadzenia
pomiarów w trybie jednoosobowym. Mechnizmy
napędzające instrument umożliwiają skanowanie
skomplikowanych obiektów przemysłowych.
Najwyższa precyzja pomiaru odległości
Zaawansowana technologia RED-tech ze wskaźnikiem
laserowym umożliwia pomiar odległości do tarczek
celowniczych z dokładnością 0.5 mm + 1 ppm.
Pomiar współrzędnych niedostępnych obiektów może
odbywać się dzięki bezlustrowemu dalmierzowi
o zasięgu 200 m.
Zastosowanie najnowszych zdobyczy
technologicznych uczyniło z tachimetru
Sokkia NET jedno z najlepszych narzędzi
do super dokładnych pomiarów geodezyjnych
Instrument dzięki swojej wysokiej
dokładności może być stosowany
w budownictwie i we wszystkich branżach
przemysłu, gdzie najważniejsza jest
precyzja wyznaczania położenia obiektów
Sokkia NET to najdokładniejsze tachimetry
w ofercie japońskiego producenta. Charakteryzują
się one najwyższą precyzją pomiaru kątów
i odległości. Dzięki tym możliwościom
przeznaczone są dla osób potrzebujących
sprzętu spełniającego najwyższe wymagania
dokładnościowe.
Instrumenty są wyposażone w mechaniczne
napędy koła poziomego i pionowego. Połączenie
serwomotorów z najdokładniejszymi systemami
odczytowymi kątów i odległości sprawiło, że
sprzęt ten sprawdzi się doskonale w monitoringu
przemieszczeń obiektów budowlanych,
kontroli poprawności montażu podzespołów
mechanicznych w różnego rodzaju fabrykach czy
skanowaniu skomplikowanych struktur w celu
sprawdzenia ich kształtów i deformacji.
Nowoczesne systemy celowania
(AUTO-POINTING) i śledzenia (AUTO-TRACKING)
umożliwiają wykonywanie precyzyjnych
pomiarów jednoosobowych. Sterowanie pracą
tachimetru odbywa się wtedy od strony tyczki
z lustrem. Komendy do instrumenty przesyłane
są łączem Bluetooth. Ten tryb pracy przyspiesza
wykonywania pomiarów i zwiększa wydajność
geodety o kilkadziesiąt procent w porównaniu
z dwuosobowym zespołem pomiarowym.
Bezbłędny wybór celu
Funkcja AUTO-POINTING śledzi pryzmat znajdujący
się najbliżej centrum lunety. Dzięki temu instrument
zawsze poprawnie identyfikuje właściwe lustro i do
niego wykonuje pomiar. Funkcja zwiększa niezawodność
monitorowania wielu celów sygnalizowanych za pomocą
pryzmatów lub folii dalmierczych.
3-DIM i 3-DIM Observer – aplikacja terenowa
do wykonywania skomplikowanych pomiarów
przemysłowych
Narzędzie może być instalowane na dowolnym
kontrolerze z systemem operacyjnym
Windows Mobile. Rozbudowany program
usprawnia najtrudniejsze pomiary obiektów
budowlanych i przemysłowych.
Tachimetry Sokkia NET należą
do nielicznego grona instrumentów
mierzących kąty z dokładnością 0,5˝
i odległości z dokładnością
0,5 mm + 1 ppm
Najważniejsze funkcje oprogramowania:
n
Szybki pomiar punktów kontrolnych
n
Pomiar wielokrotny w seriach
n
Definiowanie układów współrzędnych
n
Tyczenie punktów i osi
n
Pomiar z wykorzystaniem szablonów
n
Analizy danych i obliczenia
n
Monitoring (cykliczny pomiar
do 100 punktów)
n
Skanowanie

Dzięki sprawnym i wydajnym serwomotorom
NET jest idealnym narzędziem
do prowadzenia monitoringu obiektów
budowlanych bez udziału operatora
Zastosowanie zaawansowanych funkcji wyszukiwania celu i jego śledzenia
w odległości do 1000 m od stanowiska pozwala wykonywać najdokładniejsze
pomiary geodezyjne w trybie jednoosobowym. Możliwość sterowania
tachimetrem za pomocą kontrolera po stronie tyczki z pryzmatem zwiększa
wydajność pracy i komfort działania
Zdejmowana rączka ze
zintegrowanym modułem Bluetooth
i odbiornikiem sygnału laserowego
z nadajnika
Diody do tyczenia
Porty USB
i gniazdo kart pamięci CF
Dotykowy ekran LCD
Port szeregowy RS-232
Dalmierz bezlustrowy
l
l
Wbudowana dioda LED oświetlająca
cel i ułatwiająca identyfikację pryzmatu
w ciemnych pomieszczeniach
l
l
l
l
l
Kontroler z systemem
Windows CE i aplikacją
3-DIM lub 3-DIM Observer
Różnorodne sposoby komunikacji
do przesyłania danych i połączeń
z urządzeniami zewnętrznymi
Dane obserwacyjne i projektowe mogą
być przesyłane z/do tachimetru 4 różnymi
sposobami. Bezprzewodowy moduł Bluetooth
umożliwia łączenie się z telefonem komórkowym
i dostęp do internetu bezpośrednio w terenie.
Porty komunikacyjne w SETX:
n
Szeregowy RS-232
n
USB
n
miniUSB
n
Bluetooth
n
karta Compact Flash
Nowoczesny system
odczytowy kół poziomego
i pionowego
l
l
l
Śruby leniwe
z serwomotorami
Przycisk funkcyjny
do wyzwalania
pomiarów
l
Podświetlana klawiatura
l
Dane techniczne NET
Polecane produkty...
NET05
NET1
POMIAR KĄTÓW
Dokładność
0.5˝/1.5
cc
1˝/3
cc
Metoda
Absolutna
Min. odczyt
0.2˝/0.5
cc
0.5˝/ 1
cc
Kompensator
Dwuosiowy
Zakres kompensatora
±4´
LUNETA
Powiększenie
30x
POMIAR LUSTROWY
Zasięg (1 pryzmat)
1.3-3500 m
Dokładność
(0.8 mm + 1 ppm) x D
(1.5 mm + 1 ppm) x D
POMIAR NA TARCZKI
Zasięg
1.3-40 m
1.3-200 m
Dokładność
(0.5 mm + 1 ppm) x D
(1 mm + 1 ppm) x D
POMIAR BEZLUSTROWY
Zasięg
0.3-40 m
0.3-200 m
Dokładność
(1 mm+ 1 ppm) x D
(3 mm + 1 ppm) x D
ŚLEDZENIE LUSTRA
Zasięg
do 1000 m
INNE
System
Windows CE
Pamięć
64 MB RAM
Wyświetlacz
324 x 240 (QVGA),
kolorowy LCD, dotykowy
Ekran
Jednostronny
ZŁĄCZA
Karty
Compact Flash
Porty
szeregowy RS-232, USB, miniUSB, Bluetooth
ZASILANIE
Bateria
Wymienna Li-Ion
Czas pracy
ok. 3-9 godz.
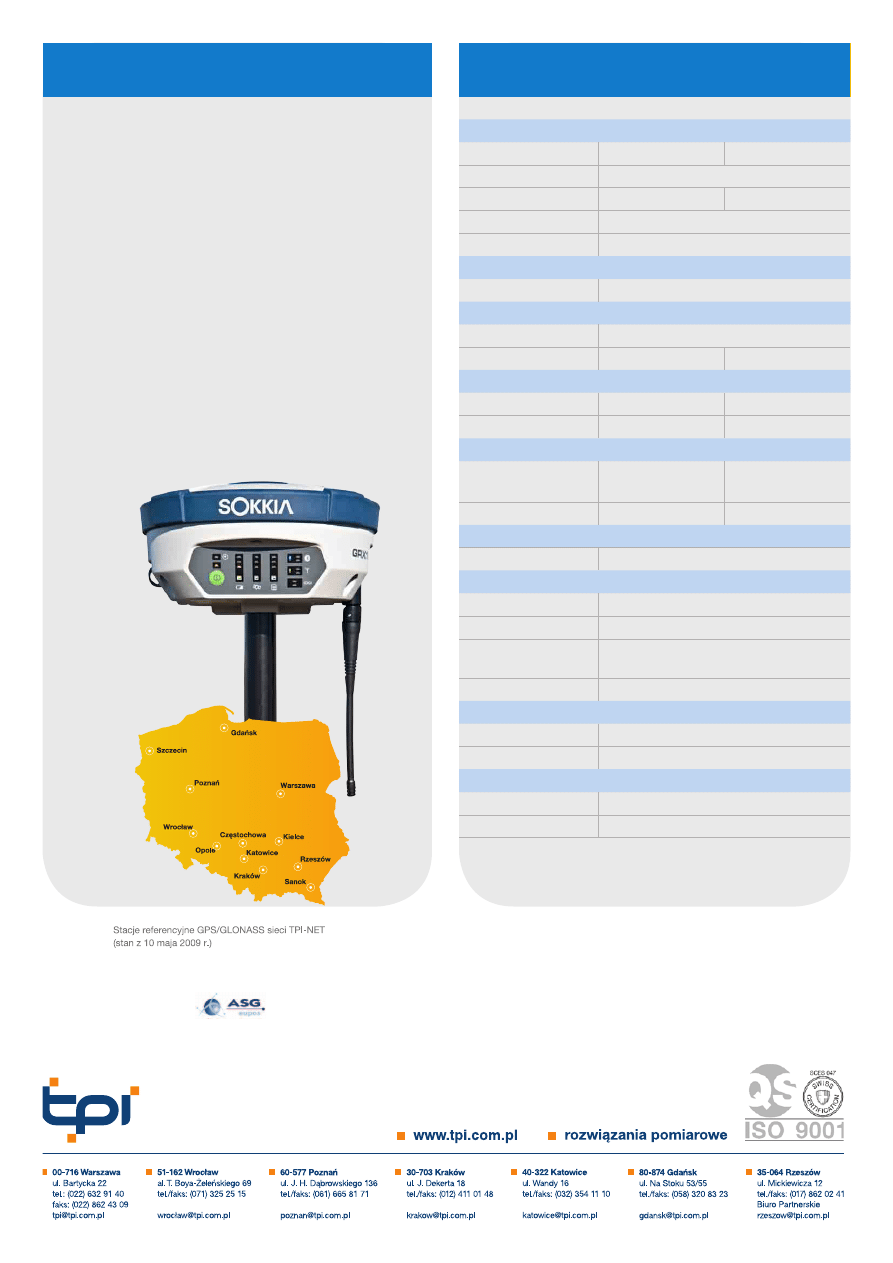
ODBIORNIK GPS RTK SOKKIA GRX1
72-kanałowy odbiornik RTK współpracujący z systemami GPS
i GLONASS. Najwyższa dokładność wyznaczania współrzędnych
i krótki czas inicjalizacji pomiarów to gwarancja dużej wydajności pracy
i bezproblemowego korzystania z instrumentu w terenie.
Wraz z odbiornikiem satelitarnym i anteną zintegrowano w jednej
obudowie również radiomodem UHF i modem GSM/GPRS, a także
czytnik kart pamięci SD. Dzięki temu sprzęt może współpracować
z własną stacją bazową, jak i z siecią ASG-EUPOS bez konieczności
jakichkolwiek modyfikacji zestawu pomiarowego.
Niewielkie rozmiary instrumentu, pełna pyło- i wodoszczelność
IP67, a także diodowy panel sterowania z komunikatami głosowymi
zapewniają najwyższy komfort obsługi.
Do współpracy z odbiornikiem przeznaczono dwa kontrolery polowe
Sokkia – SHC250 i SHC2500 z oprogramowaniem Sokkia Spectrum
Field (SSF).
Właścicielem praw do znaku słownego i logo Bluetooth jest firma Bluetooth SIG, Inc.,
a użycie tych znaków przez Topcona jest dokonywane w ramach licencji. Inne nazwy produktów
i loga firm są własnością swoich właścicieli.
Specyfikacja może zostać zmieniona bez powiadomienia.
Wszystkie prawa zastrzeżone 01/10.
Dokument nie stanowi oferty handlowej w rozumieniu art. 66, § 1 Kodeksu Cywilnego.
Firma TPI Sp. z o.o. wprowadziła i stosuje system zarządzania jakością w zakresie
Import i kompleksowa obsługa na wszystkich etapach sprzedaży
i posprzedaży sprzętu pomiarowego.
PEŁNA WSPÓŁPRACA Z SIECIAMI
ASG-EUPOS I TPI-NET
Wyszukiwarka
Podobne podstrony:
T6 Damian Nowak
Damian Nowak T4
Projekt transformatora do zasilania reaktora plazmowego Damian Nowak
TEMAT4 DAMIAN NOWAK
Projekt cewki nadprzewodnikowej Damian Nowak
SCENARIUSZ ZAJĘĆ NA TEMAT Jadwiga Nowak
TEMAT5 DAMIAN NOWAK
Temat 2 Damian Ostrowski gr C, Logistyka, nr albumu 15855
Damian Nowak T5
Projekt cewki nadprzewodnikowej Damian Nowak
TEMAT1 DAMIAN NOWAK
KONSPEKT Piłka nożna Temat Nauka zwodów z piłką w piłce nożnej Opracował Damian Piwecki, Ciekawe Pił
KONSPEKT Piłka nożna Temat Nauka zwodów z piłką w piłce nożnej Opracował Damian Piwecki, Ciekawe Pił
sidmy temat nowak[1]
Vol 14 Podst wiedza na temat przeg okr 1
TEMAT 9 hormony a odporność
Temat IV 2 2
Temat 1 Organizacja ochrony przeciwpożarowej
więcej podobnych podstron