
OKREŚLANIE
DEWIACJI
KOMPASÓW
MAGNETYCZNYCH

Przyczyny zmian dewiacji
kompasu
Po zakończeniu czynności związanych z
kompensacją dewiacji kompasów magnetycznych
dokładnie określa się wartości dewiacji w funkcji
kursów kompasowych.
W praktyce, ze względu na ograniczoną
dokładność pomiarów oraz czynników
zakłócających ten proces,
nie można skompensować dewiacji do zera.
W tym wypadku chodzi głównie o dewiację stałą A
oraz ćwierćokrężną E. Pozostała wartość dewiacji
rzędu 1 do 2 nie obniża jakości działania
kompasów magnetycznych.

Gdy dewiacja osiąga
wartości powyżej 5 do 6
,
należy dokonać kompensacji,
po czym trzeba wstępnie
określić tabelkę dewiacji.
Nawigator powinien
orientować się w tendencji
zmian dewiacji. Wiedza na ten
temat jest bowiem niezbędna
w dalszym prowadzeniu
nawigacji.

Dewiację kompasu na statku określa się w
następujących sytuacjach:
• przed wejściem do eksploatacji
(na ogół po
remoncie w stoczni),
• po znaczących zmianach konstrukcyjnych
w
pobliżu kompasu,
• przy znacznych
zmianach szerokości
magnetycznych
,
• po silnych wstrząsach kadłuba
i w razie
podejrzenia, że nastąpiło przesunięcie magnesów i
żelaz kompensacyjnych,
• po uderzeniu pioruna, pożarze
lub
spawaniu
na statku
,
• gdy statek był
zacumowany w stoczni
lub w
pobliżu urządzeń elektromagnetycznych o silnym
polu elektrycznym,
• po wejściu na mieliznę
,
• w wypadku przewozu
ładunków o silnych
właściwościach magnetycznych
,
• bez względu na okoliczności –
co najmniej raz do
roku
.

Przygotowanie statku do
procesu określania dewiacji
kompasów
Prawie zawsze określenie dewiacji
łączy się z koniecznością jej
dokompensowania. Przed
rozpoczęciem właściwego procesu
kompensacji lub określania dewiacji
kompasu należy statek odpowiednio
przygotować, to jest:

• wyrównać przechył,
• dopilnować, aby silnik był rozgrzany, a
przewody kominowe miały normalną
temperaturę, jaka występuje w trakcie rejsu,
• sprawdzić, czy nie ma innych statków, w
odległości mniejszej niż 5 kabli,
• usunąć wszystkie ruchome metalowe
części z pobliża kompasu,
• ustawić i umocować wszystkie elementy
konstrukcji, takie jak urządzenia
przeładunkowe itp.,
• sprawdzić prawidłowość pracy róży
kompasowej przez wychylenie jej za pomocą
magnesu o kąt 5 do 10 i obserwację powrotu
na kurs,

• skontrolować położenie płaszczyzny kreski
kursowej w stosunku do płaszczyzny symetrii
statku,
• zbadać prawidłowość pracy namiernika,
• przygotować odpowiednie magnesy
stałe i stal miękką do korektora
Flindersa oraz klocki z drewna do
wypełnienia rury,
• ustalić sposób łączności z miejscem przy
kompasie i z mostkiem-sterówką.
• przygotować formularze do zapisu danych
pomiarowych i wykresu krzywej dewiacji.

Praktyczne określanie dewiacji
kompasu magnetycznego
Fazy żeglugi a metoda określania dewiacji
kompasu
Wybór metody określania tabeli dewiacji zależy
od fazy żeglugi, w której znajduje się statek
oraz od istniejących w danym momencie
warunków zewnętrznych: parametrów prądów,
pory doby oraz gęstości ruchu.
W żegludze przybrzeżnej stosowane są
metody pomiarowe, polegające na porównaniu
namiarów kompasowych z namiarami
magnetycznymi nabieżników. Można posłużyć
się metodą porównania kursów miedzy
żyrokompasem o znanej poprawce (z) z kursem
kompasowym badanego kompasu
magnetycznego.

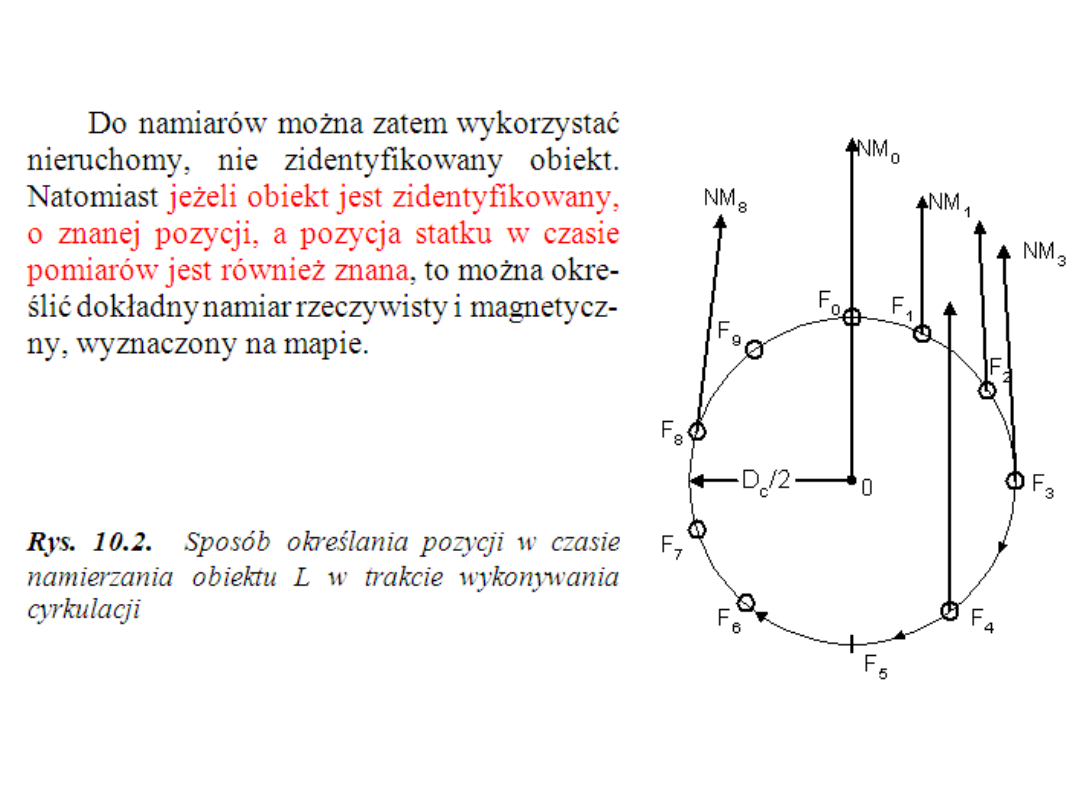
W rejonach przybrzeżnych lub w rejonach
podejścia do lądu można stosować metodę
określania tabeli dewiacji
przez porównanie
namiarów na bardzo odległy przedmiot, o znanej
(lub nieznanej) pozycji, w czasie wykonywania
cyrkulacji.
W oceanicznej fazie pływania
statku
wykorzystywane są głównie metody porównania
azymutów ciał niebieskich z namiarami
kompasowymi badanego kompasu
magnetycznego.
Każda z metod musi być omówiona
oddzielnie
, ze względu na specyfikę nawigacyjną
i sposób opracowania informacji.
W każdym wypadku należy odpowiednio
przygotować się do określenia tabeli dewiacji
kompasu magnetycznego.

Celowi temu służą
następujące czynności:
• przygotowanie kompasów
do
wykonania pomiarów,
• wybór metody
obserwacji,
• wybór miejsca
i sposoby
manewrowania statku,
• przygotowanie dokumentacji,
• zapewnienie organizacji
zapisów
danych pomiarowych,
• zaplanowanie obróbki
opracowania
danych i
formy
przedstawienia
wyników.

Metody określania
dewiacji
Metody określania dewiacji można
podzielić na trzy grupy:
• porównanie namiarów,
• porównanie kursów,
• pomiar sił ustawiających.

Do pierwszej grupy metod można zaliczyć następujące:
przejście nabieżników o znanym kierunku, porównanie
namiarów z namiarem na ciało niebieskie oraz
porównanie namiarów na odległy przedmiot.
Do drugiej grupy należy porównanie kursów z
kompasem o znanej poprawce.
Do trzeciej grupy zalicza się określanie dewiacji za
pomocą deflektora.
Każdy sposób sprowadza się do określenia wartości
dewiacji dla wszystkich kursów kompasowych, czyli
sporządzenia tabelki dewiacji.
Opracowanie zdobytych
informacji w celu określenia tabelki dewiacji
przeprowadza się trzema metodami: analityczną,
graficzną lub analityczno-graficzną
.
Istnieją jeszcze inne metody określania dewiacji, do
których należy wzajemne namierzanie się. Jednakże jest
ona bardzo pracochłonna i przestarzała, przez co prawie
zupełnie nie stosowana w marynarce handlowej.

Procedura przygotowań
statku
do określania
dewiacji kompasów
Procedura przygotowań statku do określania
dewiacji kompasów jest nastę pująca:
• Sprawdzić stan kompasów i ich
wyposażenia, do którego należy:
– system oświetlenia,
– system kompensacji (otworzyć szafkę kompasu w
celu wolnego dostępu do stali kompensacyjnej
magnesów stałych oraz stali miękkiej korektora),
– oczyszczenie i naoliwienie nośników pierścieni
kardana,
– przygotowanie odpowiednich magnesów stałych
i stali miękkiej do kompensacji dewiacji.

• Powiadomić władze
portowe o
manewrach w czasie pomiarów w rejonach
przybrzeżnych, na redach portowych.
• Wybrać obszar
oraz wyznaczyć kierunki
magnetyczne nabieżników.
• Określić obszar bezpiecznych
manewrów
z
uwzględnieniem:
– wymiarów geometrycznych,
– głębokości wody,
– gęstości ruchu jednostek,
– odległości od nabieżników magnetycznych
.

• Opracować plan manewrów
pod kątem:
– kolejności wyboru kursu kompasowego w celu
wejścia w linię nabieżnika (KK1...KKN),
– kolejności kursów w celu przejścia linii nabieżnika.
• Powiadomić dział maszynowy
o
manewrach statku lub operacji balastowania:
– w porcie, w którym wykonywany jest przechył
statku,
– na zewnątrz portu (rodzaj i czas trwania
manewrów).
• Przygotować organizację pomiarów pod
katem:
– dokumentacji (tabele pomiarów, zapisy),
– łączności między głównym kompasem a kompasem
sterowym.
• Przygotować i wybrać dogodny sposób
opracowania wyników
pomiarów jedną z
wymienionych metod:
– graficzną,
– analityczną,
– analityczno-graficzną.

Określanie dewiacji przez
porównanie namiarów w czasie
przejścia przez nabieżnik o
znanym kierunku
Metodę tę często wykorzystuje się wówczas, gdy
widoczny jest nabieżnik o znanym kierunku
magnetycznym, woda ma odpowiednią głębokość
i wystarcza miejsca do manewrów. Jest to
niezbędne do przecinania linii nabieżnika pod
różnymi kursami kompasowymi.
Na przykładzie redy portu Friderik ( = 41 08 S,
= 146 22 E) omówiona zostanie metoda
określenia dewiacji kompasu magnetycznego
przez porównanie namiarów.

• Po przygotowaniu kompasów magnetycznych:
głównego i sterowego uzyskano zezwolenie od
kapitana portu na wykonanie manewrów
pomiarowych na redzie portu.
• Należy określić kierunek magnetyczny
,
przy czym NR = 204, a deklinacja: 12 15 E
(1994). Poprawiona deklinacja d = +12.5, (z
mapy: +3 rocznie aktualna deklinacja: d =
12.5 E (1999)), obliczony namiar magnetyczny
jest równy NM = 1915.
• Wyznaczono obszar
(rejon) manewrowy.
• Ustalono kolejność
pomiarów na
określonych kursach: KK: 090, 270, 135, 315,
180, 045, 000, 225.
• Przeprowadzono pomiary NK
na
wyznaczonych kursach (patrz tab. 10.1).
• Wykreślono krzywą dewiacji
(rys. 10.1) dla
kompasu głównego.
Tabela pomiarów namiarów
kompasowych
KK
000
045
090
135
180
225
270
315
Uwagi
NM 191,
5
191.
5
191.
5
191.
5
191.
5
191.
5
191.
5
191.
5
NK
190
193
192
191
194
195
192.
5
189
+1.5 -1.5
-0.5 +0.5 -2.5
-3.5
-1
+2.5
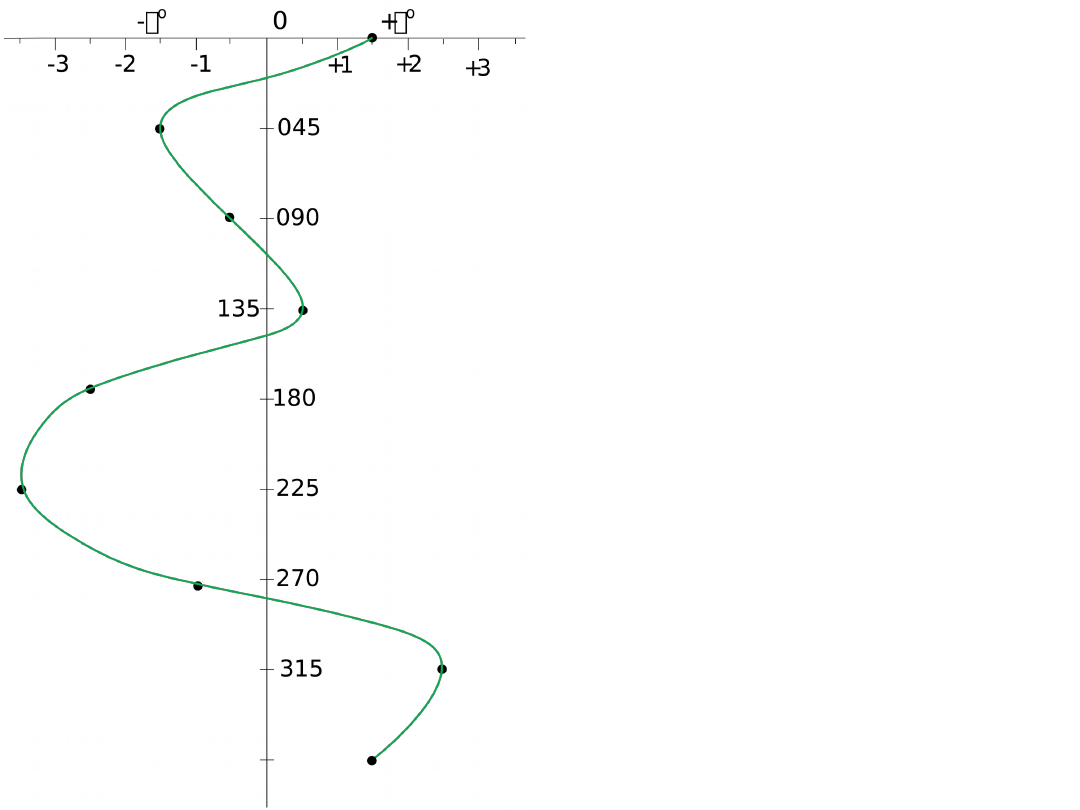
Krzywa
dewiacji
= f(KK)
• Obliczono współczynniki dewiacji:
A = (4.5 – 9) / 8 = -0.6
B = [(-0.5) – (-1)] / 2 = +0.25
C = [(1.5) – (-2.5) / 2 = + 2
D = [(-1.5 – 3.5) – (0.5 + 2.5)] / 4 =
-2
E = [(1.5 – 2.5) – (-0.5 – 1)] / 4 =
+0.25
• Wykonano tabelkę dewiacji na podstawie
analizy graficznej lub na podstawie wzoru
Archibalda Smitha w odniesieniu do
znanych współczynników dewiacji AE.

• Przeprowadzono dyskusję wyników obserwacji:
dewiacje są zbyt duże. Należy zatem
dekompensować współczynnik +C (magnesem
stałym prostopadłym do diametralnej, niebieskim
końcem na lewą burtę). Należy również
zmniejszyć współczynnik -D. Na kursach
pośrednich (45, 135...) odsunąć kule od środka
róży (oddalić), zmniejszając o 2 namiar
kompasowy.
• Po tych zabiegach ponownie sprawdzono dewiację i
wykonano stosowną tabelkę. W tym wypadku
najdogodniejsza jest metoda graficzna.
Należy
nanieść wartości dewiacji na ośmiu głównych
kursach na wykres z podziałką na 36 części.
Następnie co 10 (1 kratka) trzeba zdjąć wartości z
wykresu, wpisując dane do tabelki. Tabelkę
uzupełnia się danymi na temat nazw statku, dat
wykonania pomiarów, pozycji (, ) oraz opatruje
podpisem osoby wykonującej dewiację kompasu
magnetycznego.
Określanie dewiacji
z
porównania namiarów na
odległy obiekt stały
Założenia metody pomiarowej
Metodę stosuje się w dwóch wypadkach:
• gdy istnieje odległy, widoczny,
nieruchomy obiekt
o nieznanej pozycji
w czasie pomiaru kierunków ze statku w
trakcie cyrkulacji;
• gdy istnieją możliwości określenia
dokładnej pozycji odległego obiektu
nieruchomego
oraz
pozycji statku w
czasie wykonywania pomiarów
na
statku w trakcie cyrkulacji.
Ogólna zasada analizowanej metody oparta jest na
znajomości namiaru magnetycznego na namierzony
obiekt:
= NM – NK
(10.1)
Na podstawie wzoru (5.2) uśredniona suma wszystkich
dewiacji na kursach kompasowych równa się dewiacji
stałej A. Zatem po podstawieniu do wzoru (10.1) zamiast
wartości A, uzyskamy:
A = (NM – NK)/
Można też, uśredniając stronami, otrzymać:
Zakłada się, że A 0
Można zatem stwierdzić, że w celu uzyskania
średniego namiaru magnetycznego na obiekt,
należy uśrednić namiary kompasowe i
pomniejszyć otrzymaną wartość o współczynnik
dewiacji typu A.
W praktyce w trakcie pomiarów często zaniedbuje
się wartość A, zakładając, że A jest mniejsze od
jednego stopnia i mieści się w granicach
dokładności określania kierunku za pomocą
namiernika. Gdy natomiast znana jest pozycja
odległego obiektu LK oraz pozycja statku, to
proces pomiarowy przebiega inaczej:

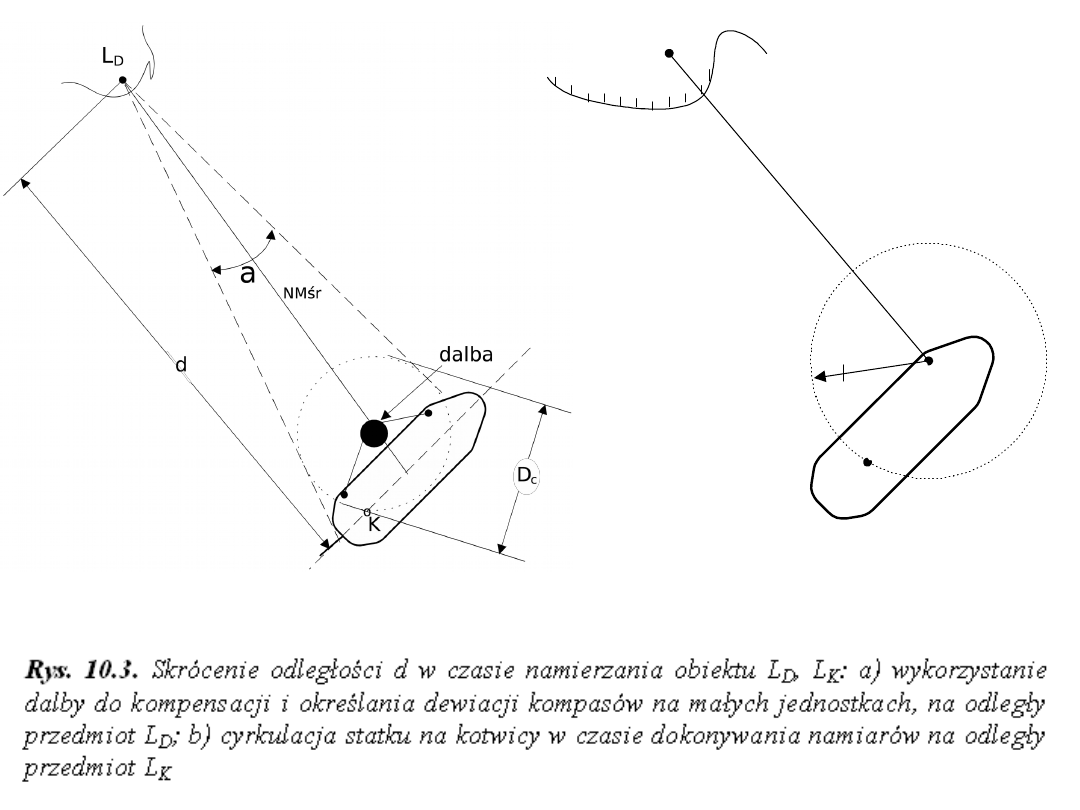
W celu uniknięcia błędu paralaksy w czasie wykonywania
cyrkulacji należy
przyjąć odpowiednią odległość od
przedmiotu
namierzonego. Błąd paralaksy α nie może
przekroczyć 0.5. Mniejsze statki w czasie cyrkulacji mogą
być zamocowane do pławy lub dalby cumowniczej (rys.
10.3). Ta odległość od przedmiotu nie może wynosić mniej
niż 4 mile morskie.
Cyrkulacja wykonana na kotwicy
wymaga odległości co najmniej 6 mil morskich
od
przedmiotu namierzonego (rys. 10.3b). Wymagane
odległości obiektu namierzonego w funkcji średniej
cyrkulacji swobodnej podane są w tabeli 10.2.
Gdy
średnica cyrkulacji statku wynosi 300 m, to
odległość do przedmiotu nie może być mniejsza
aniżeli 18 mil morskich.
K
P
L
K
d
K
> 6 Mm
D
c
a) b)
Wymagana odległość obiektu do
namierzania
w funkcji średniej
cyrkulacji przy zachowaniu
kąta
paralaksy 0.5 na poziomie
obserwatora
a = 10 m
D
c [m]
d
[Mm]
Wysokość
obiektu h
0
[m]
80
110
300
500
600
4.0
6.0
18.0
31.0
37.0
–
–
>35
>145
>215
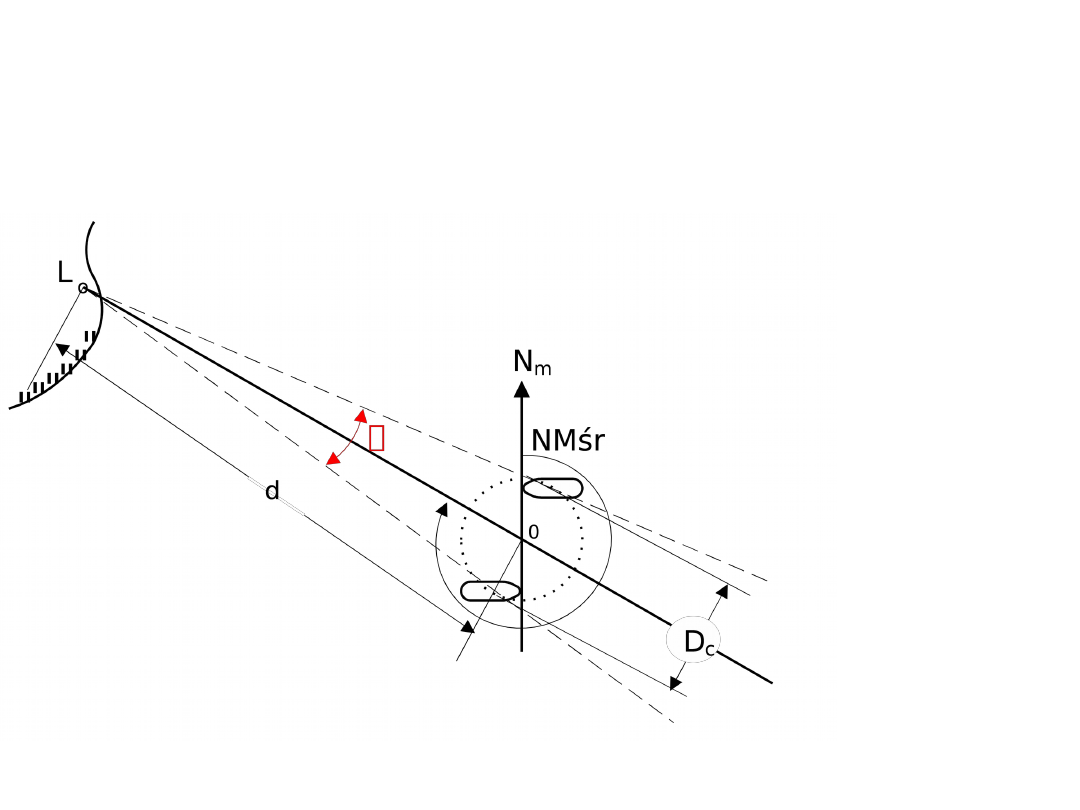
Do uzyskania granicznej wartości błędu paralaksy
α =
0.5
konieczna jest odpowiednia zależność między
odległością d statku do przedmiotu namierzanego i
średnicą cyrkulacji Dc (w metrach). Zależność, o której
mowa, można zapisać w postaci:
d/Dc = (60100) (10.5)
Rys. 10.4.
Ilustracja
określania
dewiacji przez
namierzanie na
odległy
przedmiot w
czasie cyrkulacji
statku

Warunki widoczności
dla wymienionych
odległości d nie zawsze pozwalają na to, aby
można było wykonać dewiację w każdym rejonie i
o każdej porze dnia.
Cyrkulacji
dokonuje się
w
lewo lub w prawo
celem uniknięcia błędu
systematycznego, który wynika z bezwładności
róży obracającej się w płynie. Róża opóźnia się w
stosunku do ruchu kadłuba.
Szybkość zmiany
kursu w obu cyrkulacjach powinna być
jednakowa
, to znaczy kąty wychylenia steru i
obrotu śruby statku powinny być identyczne. W
pomiarach konieczny jest udział co najmniej
dwóch osób, aby możliwe było zaobserwowanie
kursu i namiaru równocześnie, w tym samym
momencie.

Organizacja pomiarów
• Wyboru miejsca manewrów
dokonuje się
podobnie jak w metodach przejścia przez
nabieżnik. Wybrany obszar musi obejmować
powierzchnię cyrkulacji oraz miejsce na zmianę
kierunku cyrkulacji, odpowiednią głębokość
wody oraz w miarę niską skalę falowania.
Najważniejsze jest zapewnienie ciągłej
widoczności obiektu
przy odpowiedniej
widzialności (rys. 10.5).
• Statek musi być odpowiednio
przygotowany
do pomiarów: urządzenia
przeładunkowe – sklarowane do pływania
pełnomorskiego, wyposażenie kompasu, i
sprawne działanie –
zapewniona
odpowiednio duża odległość od stalowych
obiektów (wież wiertniczych itp.) –
zachowana.
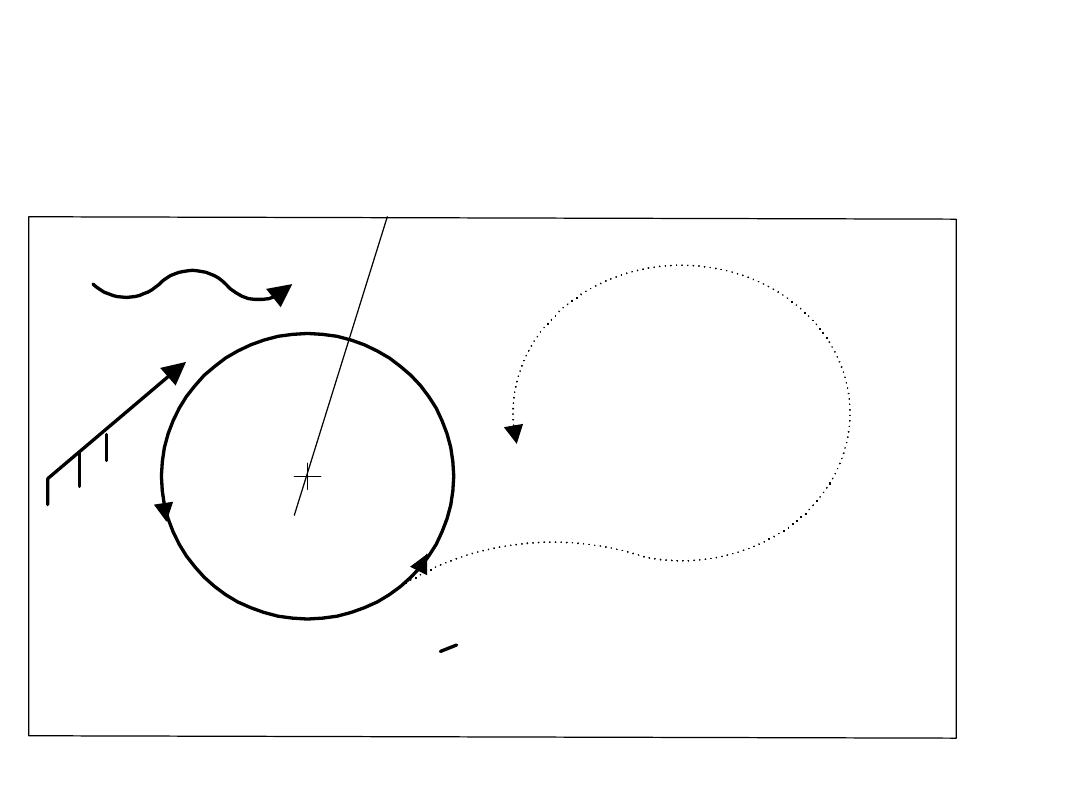
Rys. 10.5. Obszar pomiarowy
w czasie cyrkulacji w lewo i w
prawo
0
h
0
> 20 - 50 m
gębokość morza
prądy
wiatr
o
o
o
o
Organizacja pomiarów metodą
uwzględniającą nieznaną pozycję
obiektu L jest następująca:
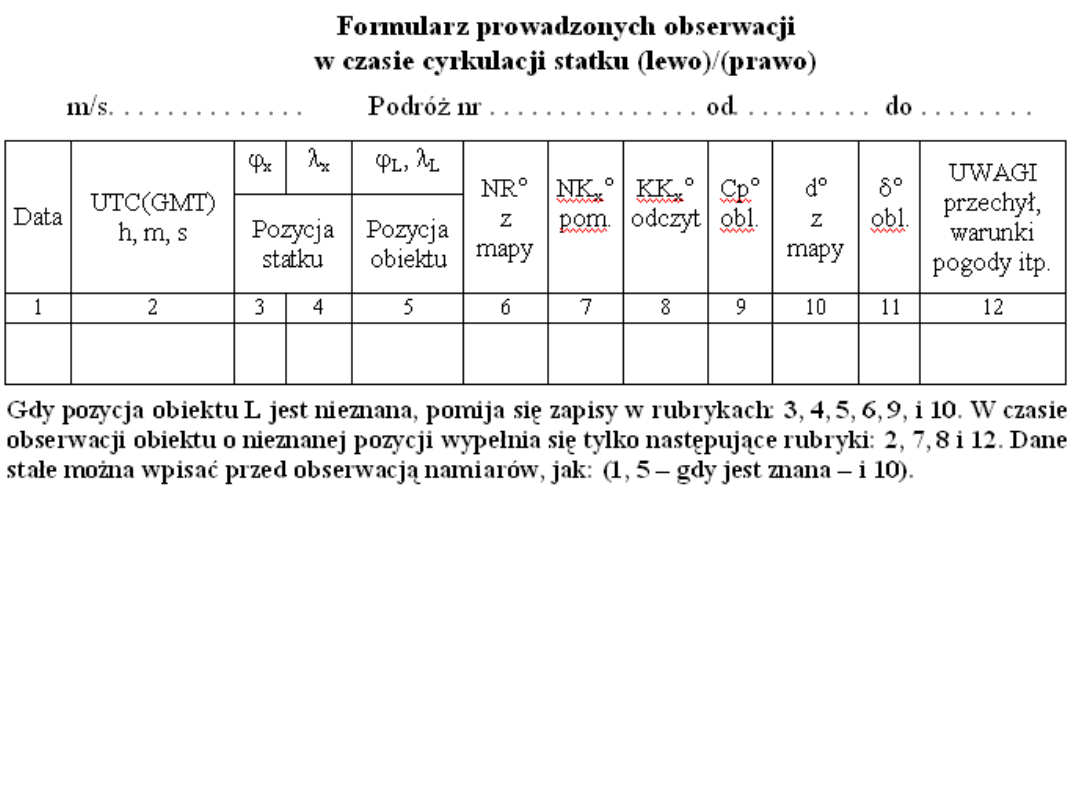
• Przygotowanie formularzy
do wpisywania,
dla danego kursu namiaru kompasowego na
odległy przedmiot (tab. 10.3 pozycję 3 i 4 nie
wypełnia się ).
• Obliczanie wartości namiaru
magnetycznego
, gdy pozycja obiektu L jest
nieznana, z zależności:
(10.6)
Przy czym obliczenia wykonuje się oddzielnie
dla kierunku cyrkulacji w prawo i w lewo.
• Określenie różnicy między obliczonym
namiarem magnetycznym a namiarem
kompasowym
, dla każdego kursu, w celu
otrzymania dewiacji.
śr
n
1
i
1
śr
śr
A
n
NK
NM
NK
OPRACOWANIE POMIARÓW – dla znanej pozycji
obiektu
• Wykreślenie namiarów rzeczywistych na mapie przez
połączenie pozycji obserwowanej (x , x) z obiektem
obserwowanym L (L, L).
• Obliczenie Cp jako różnicy NR i NKx.
• Obliczenie dewiacji jako różnicy Cp i d.
• Opracowanie pomiarów w formie tabelki.

Określone dewiacje, w odstępach co 20, dla
cyrkulacji w lewo
, należy nanieść na skalę
kursów kompasowych, przyjmując 1 cm dla
różnicy kursu 10. Podobnie na wspólnym
układzie współrzędnych
należy wykonać
krzywą dewiacji dla cyrkulacji w prawo.
Na wykresie uzyskuje się dwie krzywe, obie
są obarczone błędem systematycznym,
spowodowanym opóźnieniem róży
kompasowej w trakcie cyrkulacji. W czasie
trwania cyrkulacji powstaje błąd wleczenia
róży w kompasach w płynie.
Wykreślenie pośredniej krzywej
pozwala usunąć
błędy systematyczne A oraz powstałą
dewiację typu E.
Po naniesieniu wartości dewiacji na krzywą
można rozpoznać błędy grube
, popełnione
bądź w czasie pomiarów, bądź w czasie ich
opracowywania (rys. 10.6).
Krzywą ciągłą (rys. 10.6)
można wykorzystać do
sporządzenia tabelki dewiacji,
dla dowolnej liczby wybranych
kursów kompasowych.
Inna
metoda otrzymania dewiacji
polega na obliczeniu
współczynników dewiacji A, B,
C, D, E dla krzywej
wypadkowej, które
podstawione do ogólnego
wzoru Archibalda Smitha,
pozwolą obliczyć dewiację
dotyczącą dowolnie wybranych
kursów kompasowych.
Rys. 10.6. Wykresy dewiacji
wykonane dla: cyrkulacji w lewo –
linia przery wana, w prawo – linia
przerywana z kropkami. Linia ciągła
ilustruje krzy wą dewiacji wolną od
błędów jako wartość średnią; –
usunięte błędy grube pomiarów
Określanie dewiacji
przez porównanie namiarów na
ciała niebieskie
Założenia metody astronomicznej
W rejonach odległych od lądu, gdzie nie da się korzystać z
nabieżników lub lądowych obiektów stałych, można do
namierzania wykorzystać ciała niebieskie. Azymuty ciał
niebieskich łatwo obliczyć z tablic astronomicznych. Do
namierzania
wybiera się ciała niebieskie na małych
wysokościach.
Mogą to być planety, gwiazdy lub Słońce.
Dewiację kompasu określa się pośrednio z obliczonej
całkowitej poprawki kompasu ze wzoru:
Cp – całkowita poprawka,
Az – azymut ciała niebieskiego,
d - deklinacja magnetyczna miejsca obserwacji [],
NKx – namiar kompasowy danego ciała niebieskiego.

Wybór ciał niebieskich do
obserwacji
W dzień można określać tabelę
dewiacji ze Słońca
,
od jego wschodu do momentu, w którym
wysokość nie
przekroczy 10
. Podobnie w czasie zachodu wybiera
się czas, w którym można wykonać zaplanowane
pomiary.
W porze nocnej
należy
wybierać ciała niebieskie
lub planety najjaśniejsze,
które nie zmieniają
znacznie wysokości w czasie.
Są to obiekty o
azymutach zbliżonych do północnych lub południowych.
Ciała niebieskie o azymutach wschodnich lub
zachodnich na małych szerokościach, zmieniają
wysokość w czasie bardzo szybko lub maksymalnie,
czyli:
dh / dt 1
W czasie obserwacji
stan morza powinien
kształtować się poniżej 3B
(brak martwej fali).

Sposób pomiarów i
manewrowanie statkiem
Istnieją dwie metody pomiarów.
Pierwsza
polega na ustawianiu statku na osiem
głównych kursów
w celu namierzenia ciała
niebieskiego. Zwroty wykonuje się bardzo
wolno, utrzymując statek przez chwilę na
stałym kursie, co pozwala na dokładny namiar
kompasowy (serię namiarów).
Drugi sposób polega na ciągłej zmianie
kursu w czasie cyrkulacja statku
. W
określonym momencie, gdy statek zbliża się do
wybranego kursu (np. co 20 różnicy kursu)
odczytuje się namiar na dane ciało,
utrzymując namiernik stale skierowany na
namierzane ciało niebieskie
. W tej metodzie
pomiarowej musi być również dwóch
obserwatorów.

Wybór metody pomiarowej
Podstawą wyboru metody pomiarowej są
warunki obserwacji oraz pora doby, a
także pozycja obserwatora
, głównie
szerokość geograficzna miejsca
obserwacji.
Należy zatem porównać
przyrost
wysokości w czasie z planowaną
prędkością cyrkulacji
statku, na
przykład gdy przyrost wysokości Słońca o
10 trwać będzie 60 minut, to całkowita
cyrkulacja statku musi być wykonana w
czasie krótszym.
Na dużych szerokościach
geograficznych
zmiany wysokości
Słońca w czasie są mniejsze
(porównaj ze worem: dh/dt = sin Az cos
z).
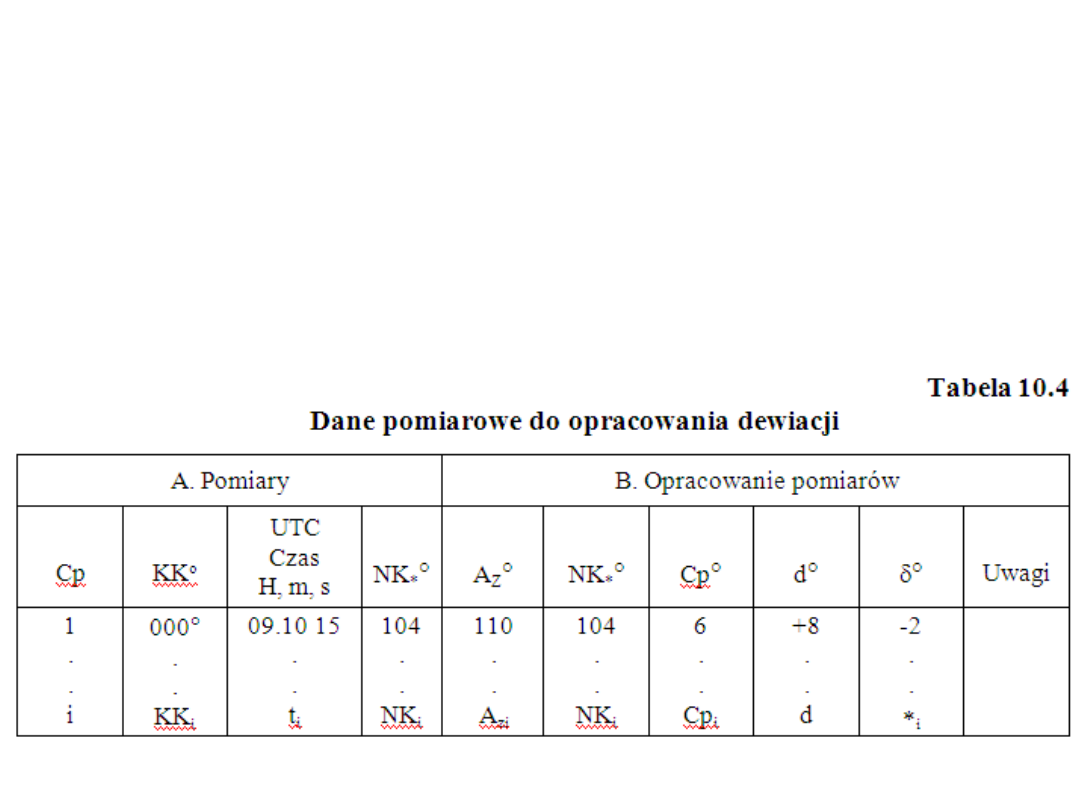
Metodyka opracowania
pomiarów
Po ustaleniu metody manewrów trzeba
przygotować dokumentację pomiarową. W
tym celu opracowuje się wzór tabeli
pomiarowej (tab.10.4 A).

Dane do opracowania pomiarów zawarte są w części B
tabeli 10.4.
Najbardziej pracochłonną częścią
opracowania pomiarów jest obliczenie azymutów ciała
niebieskiego na okres obserwacji.
Należy tu
skorzystać z tablic astronomicznych HD, HO. Korzystanie z
azymutów w funkcji czasu ułatwi forma graficzna. Dla
okresu obserwacji tp – tk = t określa się z tablic; AZp
AZk dla (Z, x , t t K), przy czym , tp = LHAp dla
UTCp; przyjmuje się pełne wartości stopni, zaokrąglając
długości geograficzne. Następnie dla różnicy LHA o 1, co
odpowiada 4 m różnicy czasu, wyznacza się azymuty.
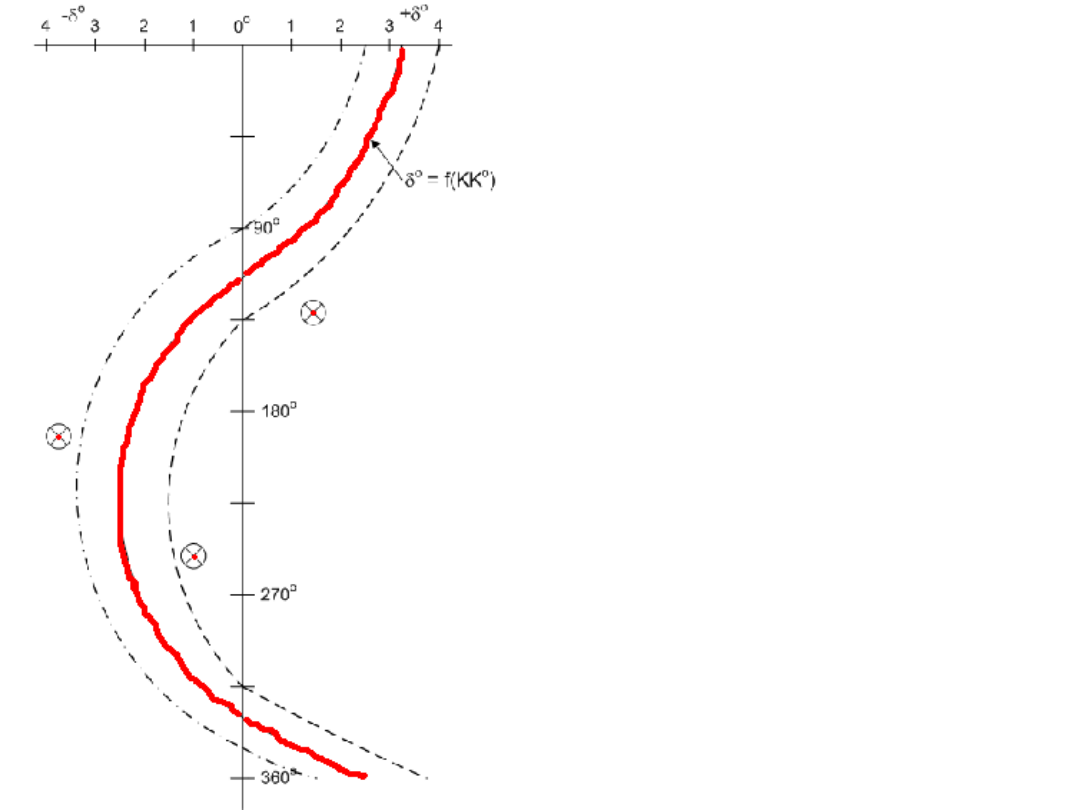
Poszczególne wartości azymutów dla określonych
momentów UTC wykreśla się w formie krzywej
(rys.
10.7).
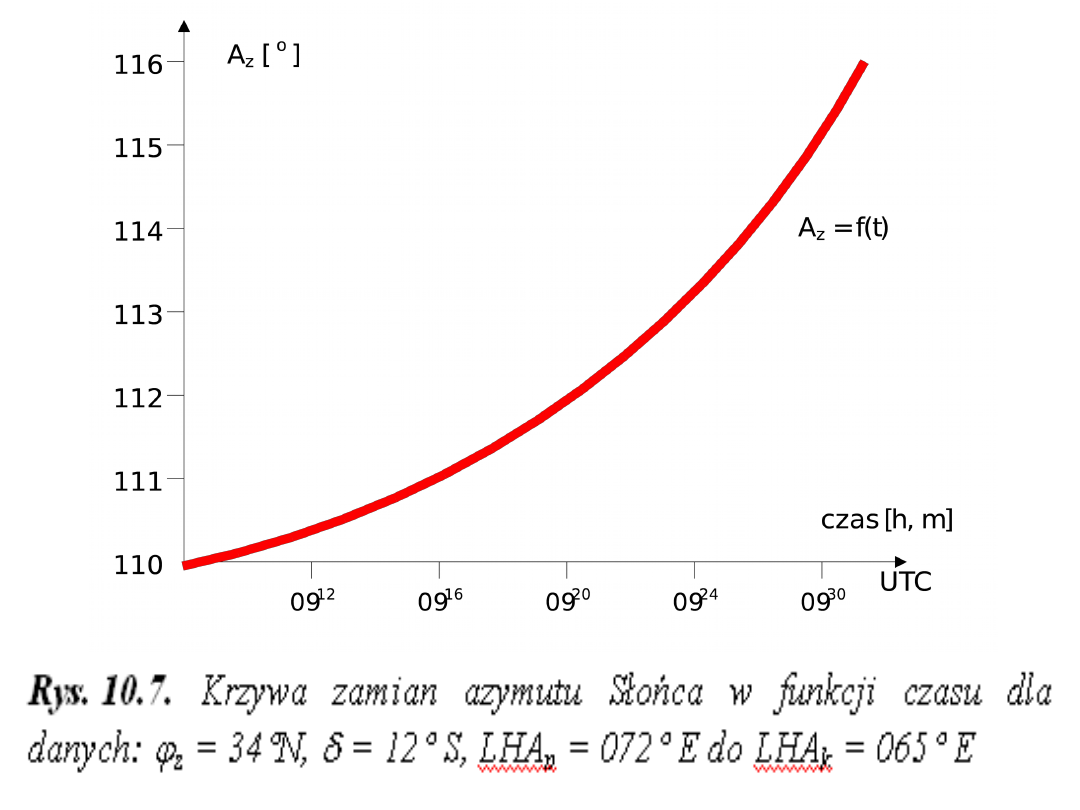
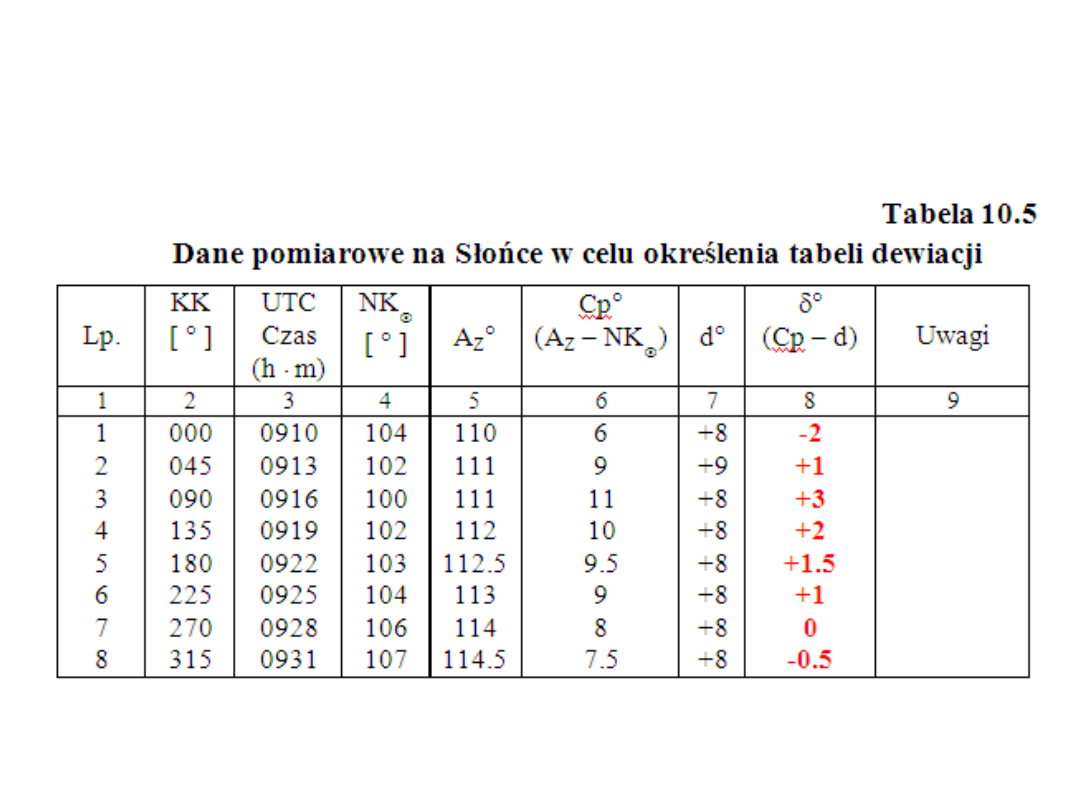
Przykład opracowania
pomiarów
Dana jest tabela namiarów kompasowych na Słońce, na
ośmiu głównych kursach kompasowych (tab.10.5).
Azymut Słońca (tab. 10.5, rubr. 5) określa się na
podstawie krzywej (rys. 10.7), natomiast wartość
deklinacji magnetycznej z mapy; d = +8 (E). Wykres
dewiacji pokazano na rysunku 10.8.
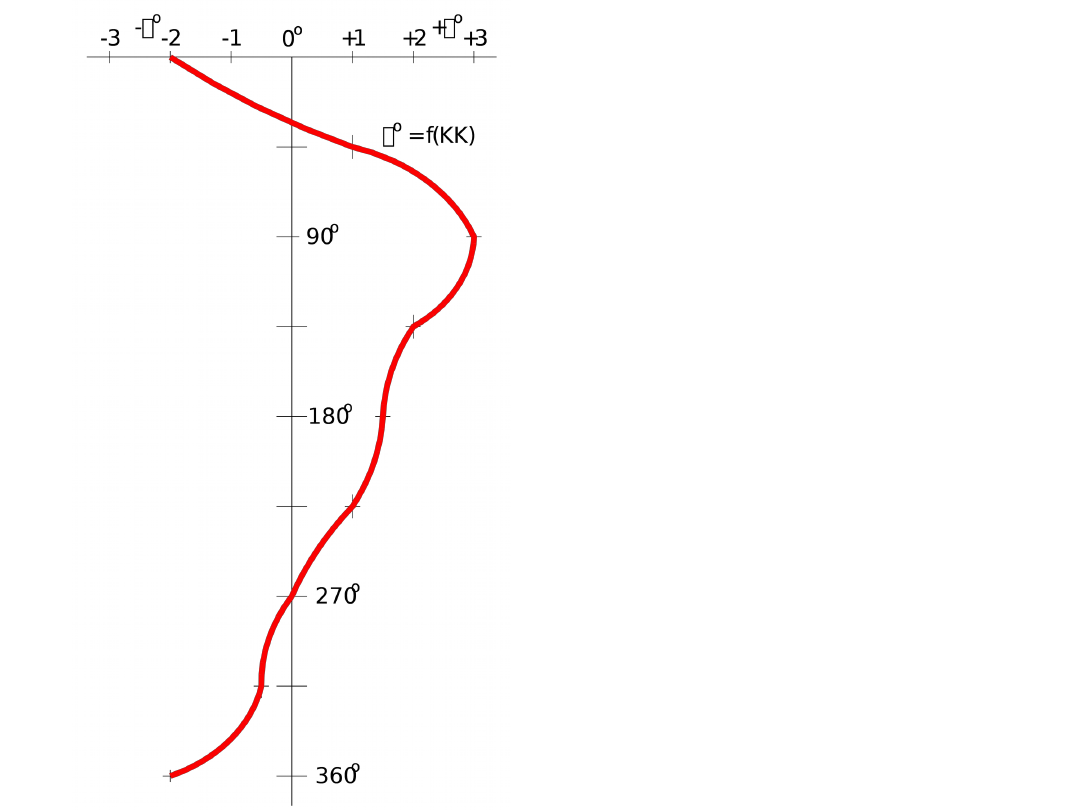
Rys. 10.8. Wykres
dewiacji w funkcji kursu
kompasowego z
obserwacji namiarów na
Słońce na ośmiu
głównych kursach (wg
tabeli 10.5)

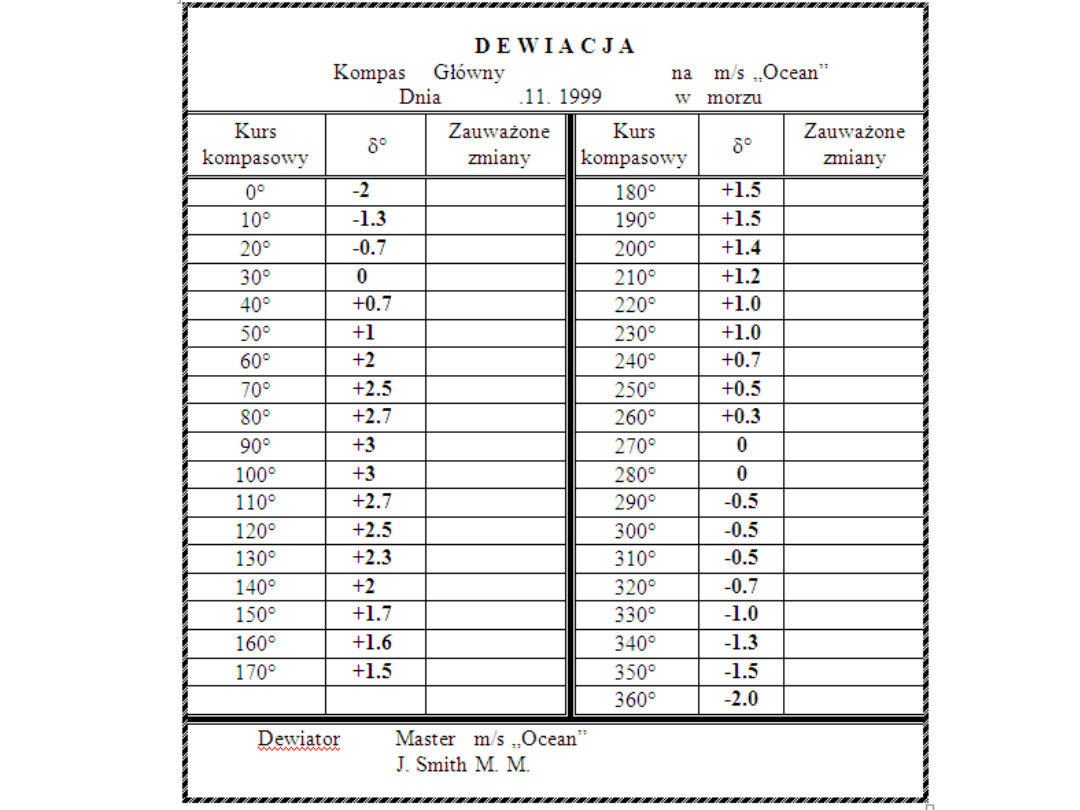
Tabelkę dewiacji (rys. 10.9) można wykonać
na podstawie danych z wykresu lub po
obliczeniu współczynników dewiacji wzorem
Archibalda Smitha, można wartości
dewiacji określić dla kursów kompasowych
co 10 lub 20 stopni.
Obliczenie wartości współczynników
A, B, C, D, E:
A = (8.5 – 2.5) = 6/8 =
+0,75
B = (3 – 0) / 2 = 3/2 =
+1.5
C = (-2 – 1.5) = -3.5/2 =
-1.75
D = (+1 +1) - (2 – 0.5) = 2 – 1.5) = -0.5/4 =
-0.12
E = (-2 + 1.5) – (3 + 0) = (+0.5 – 3) = -3.5/4
=
-0.8

Określanie dewiacji kompasu
magnetycznego
przez porównanie z żyrokompasem o znanej
poprawce
Większość statków pełnomorskich, zgodnie z
Konwencją SOLAS’98, wyposażona jest w
żyrokompasy. Żyrokompasy mogą zatem służyć
jako podstawowy wzorzec do
porównywania z kursem kompasu
magnetycznego.
Metoda
porównania wskazań kompasu
magnetycznego z żyrokompasem o znanej
poprawce jest
powszechnie stosowana do
określania tabelki dewiacji
, jak również, w
czasie prowadzenia nawigacji przez oficerów
wachtowych, do sprawdzania prawidłowości
wskazań urządzeń nawigacyjnych.

Podstawą tej metody jest obliczenie dewiacji ze wzoru:
= KM – KK
oraz
KM = KŻ + Cp – d
(10.8)
KM – kurs magnetyczny,
KK– kurs kompasu magnetycznego,
Cpż - całkowita poprawka żyrokompasu,
d – deklinacja magnetyczna miejsca obserwacji.
Należy wykonać następujące czynności:
Wybrać odpowiedni rejon
, w którym można
swobodnie manewrować (cyrkulować) statkiem.
Określić całkowitą poprawkę żyrokompasu.
Ustalić parametry ruchu statku
, jak: prędkość i
szybkość zmiany kursu dla danej wartości całkowitej
poprawki żyrokompasu.
Przygotować organizację pomiarów
i
dokumentację.
Opracować dane pomiarowe
i wykonać tabelkę
dewiacji (tab. 10.6).
UWAGA: W czasie porównywania wskazań należy zwracać
uwagę na równomierność zmiany kursu oraz utrzymania
stałej prędkości ruchu statku.
Dokładność metody zależy głównie od dokładności
oceny wskazań wzorca, w tym wypadku – od
wskazań żyrokompasu
,
a ściślej – dokładności
obliczenia kursu magnetycznego.
Pomijając kwestię dokładności deklinacji, należy
stwierdzić, że główne zagadnienie w równaniu (10.8)
stanowi ocena dokładności poprawki żyrokompasu Cpż.

Błędy wskazań
żyrokompasu
Wskazania żyrokompasu obarczone są dwiema głównymi
grupami błędów:
błędami stałymi,
błędami zmiennymi
.
Błędy stałe
wynikają z dwóch przyczyn.
Pierwszą
stanowi błąd ustawienia kreski kursowej
oraz błędy
ustawienia kompasu w osi diametralnej statku
.
Druga to
błędy przekazywania kursu od żyromatki
do repetytorów.
Błędy zmienne
można podzielić na:
dynamiczne –
wynikające z ruchu statku na fali i w czasie
manewrowania – oraz wpływu prędkości i zmian
szerokości geograficznej.
Błędy zmienne są
zależne od dynamiki ruchu statku
i zmieniają się w czasie
. Gwałtowna zmiana kursu o
180, przy prędkości 20 węzłów, wprowadzi chwilową
dewiację żyrokompasu, rzędu 34, znikającą w czasie
kilkunastu minut.
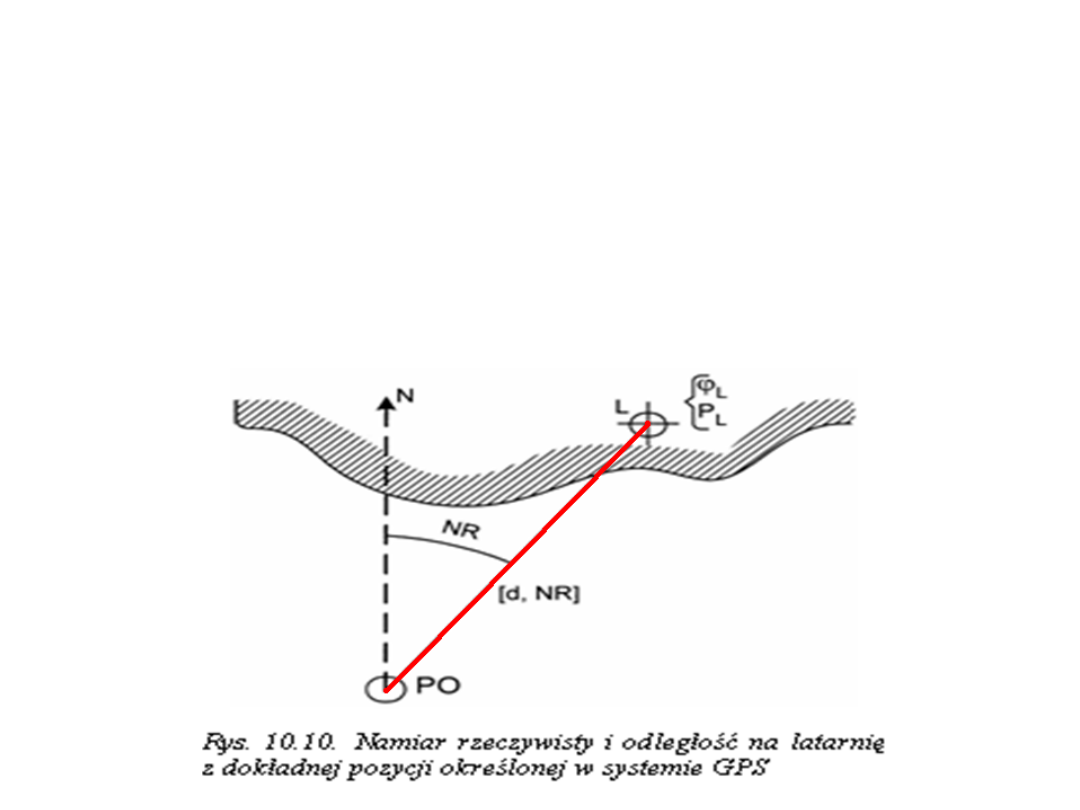
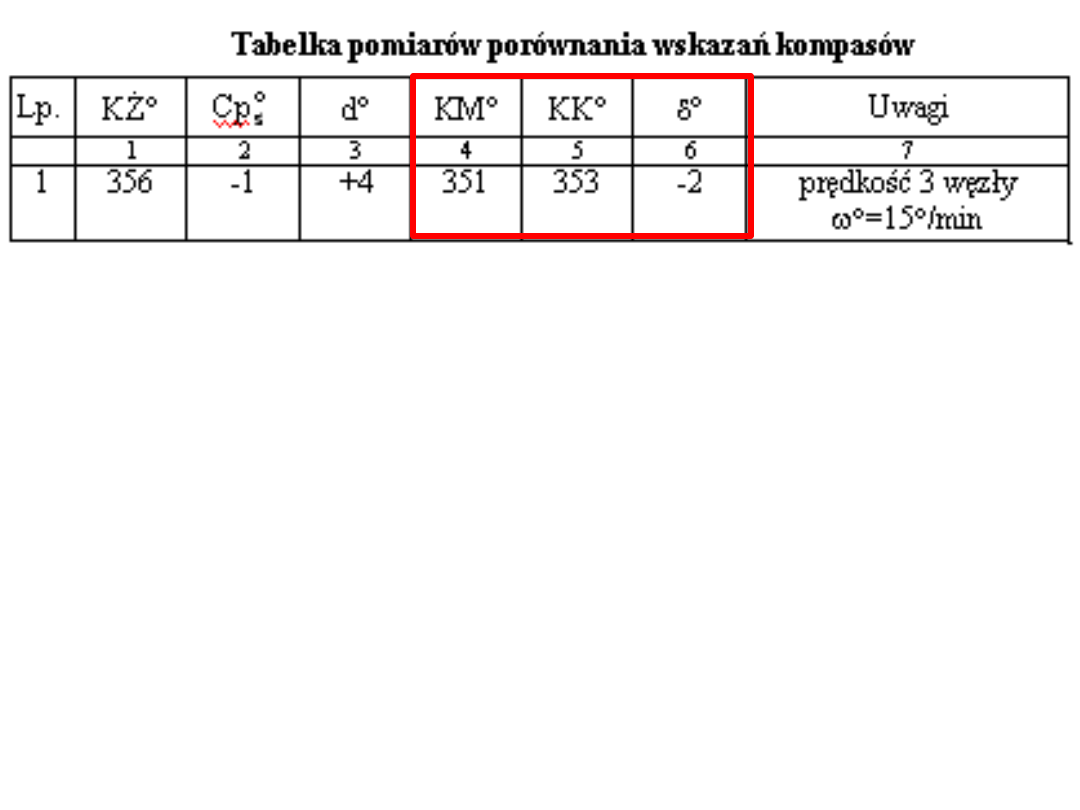
Określanie błędów wskazań kompasów
okrętowych
przy wykorzystaniu systemów
satelitarnych
Zwiększone dokładności określania pozycji za pomocą
systemów satelitarnych pozwalają na określanie błędów
wskazań kompasów na podstawie porównania
namiarów na znane, stałe obiekty na lądzie [10].
Na rysunku 10.10 pokazany jest sposób określania
namiaru i odległości za pomocą odbiornika GPS. Metoda
polega na wczytaniu pozycji latarni do odbior nika jako
punktu zwrotu (waypoint).
W momencie obserwacji
namiaru kompaso wego na latarnię L i określonej
pozycji w odbiorniku otrzymuje się odległość od
pozycji obserwowanej PO do latarni L.
Można również
uzyskać kierunek rzeczywisty, czyli namiar rzeczywisty z
pozycji obserwowanej na latarnię.
Procedura określenia cp kompasu jest następująca:
1.Ustawić odbiornik GPS
w układzie pracy
loksodromicznym, wczytać pozycję latarni (z List of Lights)
jako punkt zwrotu (waypoint).
2.
Na określonych, planowanych kursach kompasowych
określać
namiary kompasowe na latarnię L.
3.Jednocześnie rejestrować pozycję obserwowaną
w momencie określania namiarów kompasowych.
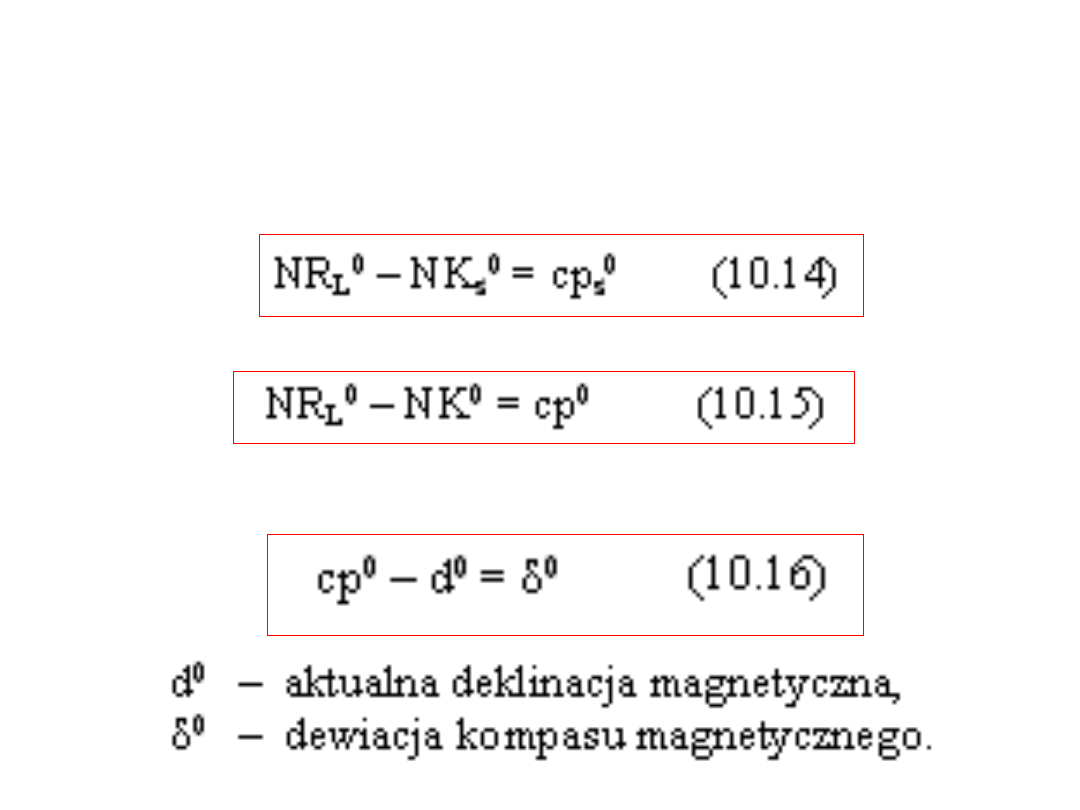
4.Porównać namiary rzeczywiste (loksodromiczne)
określone w odbiorniku GPS z namiarami
kompasowymi, co pozwala określać cp
żyrokompasu:
5.
Dla kompasu magnetycznego mamy następującą
zależność:
Obliczone wartości dewiacji uzyskuje się następująco:
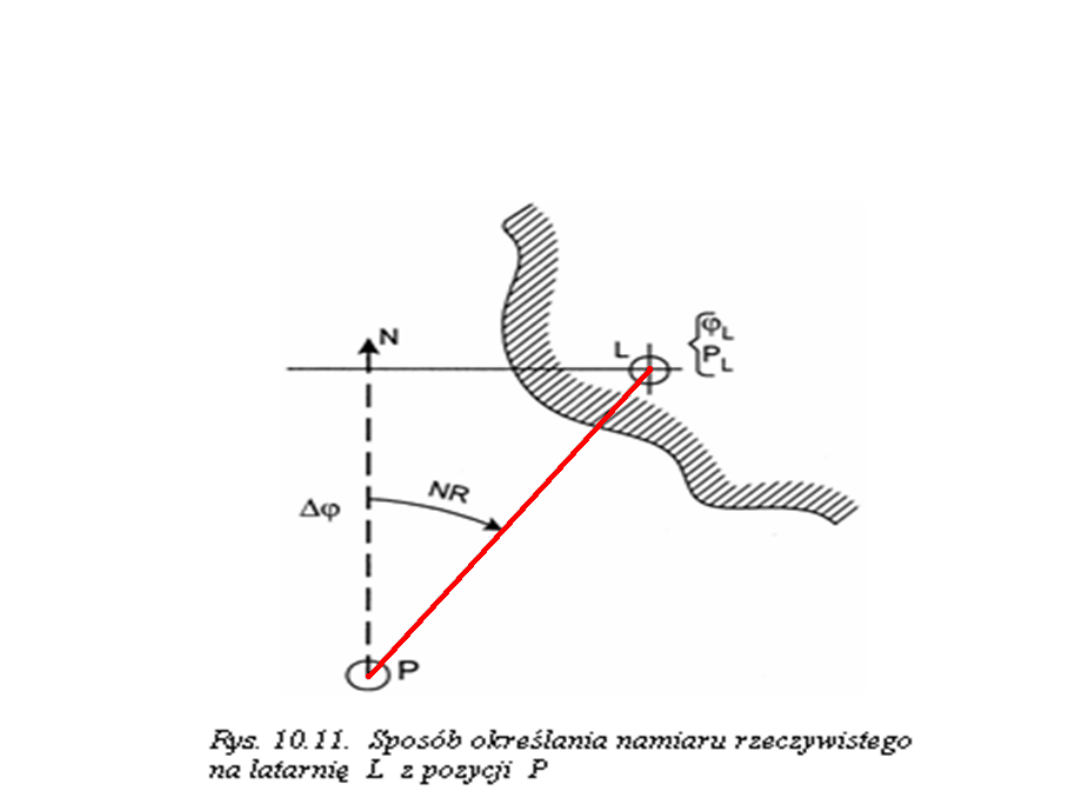
W razie braku możliwości określania namiaru
rzeczywistego i odległości do namierzanego punktu L z
dokładnej pozycji obserwowanej, wartości te można
określić analitycznie.
Zasada oceny NR analitycznie jest następująca (rys.
10.11):
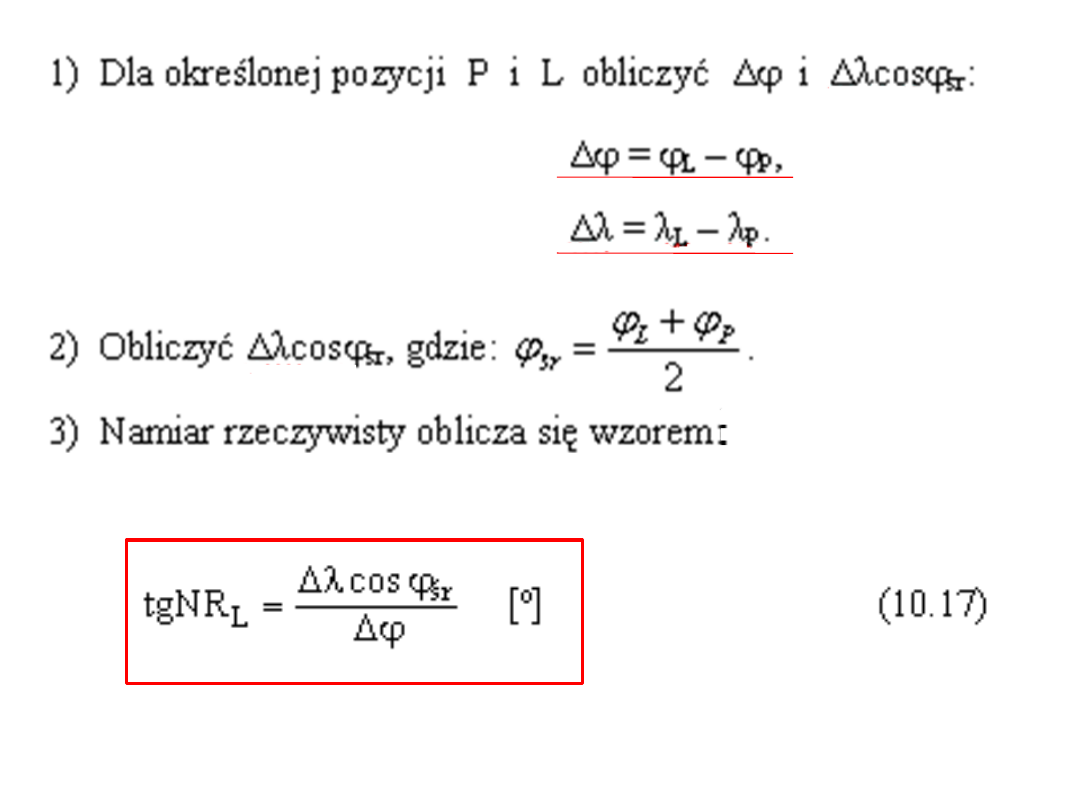

Ograniczenia w określaniu cp
wymienioną metodą są
następujące
:
• dokładność określania
NR za pomocą
odbiornika GPS jest ograniczona do jednego
stopnia. Określenie NR za pomocą wzoru
(10.17) jest bardziej dokładne i zależy tylko
od dokładności pozycji określonej przez
odbiornik GPS;
• dokładność pozycji latarń
w List of Light
and Fog Signals również jest ograniczona,
gdyż wyznaczona pozycja latarni podana jest
z jednym miejscem po przecinku;
• światła latarni i oczy obserwatora
powinny znajdować się na porównywalnej
wysokości.

Zalety metody:
• Metoda pozwala na szybkie i
dokładne określenie namiaru
rzeczywistego w wypadku
obliczania za pomocą wzoru
(10.17).
• Namiary na latarnię można
stosować w dowolnej porze doby.
• Obliczenie namiaru
rzeczywistego jest szybkie i
proste.
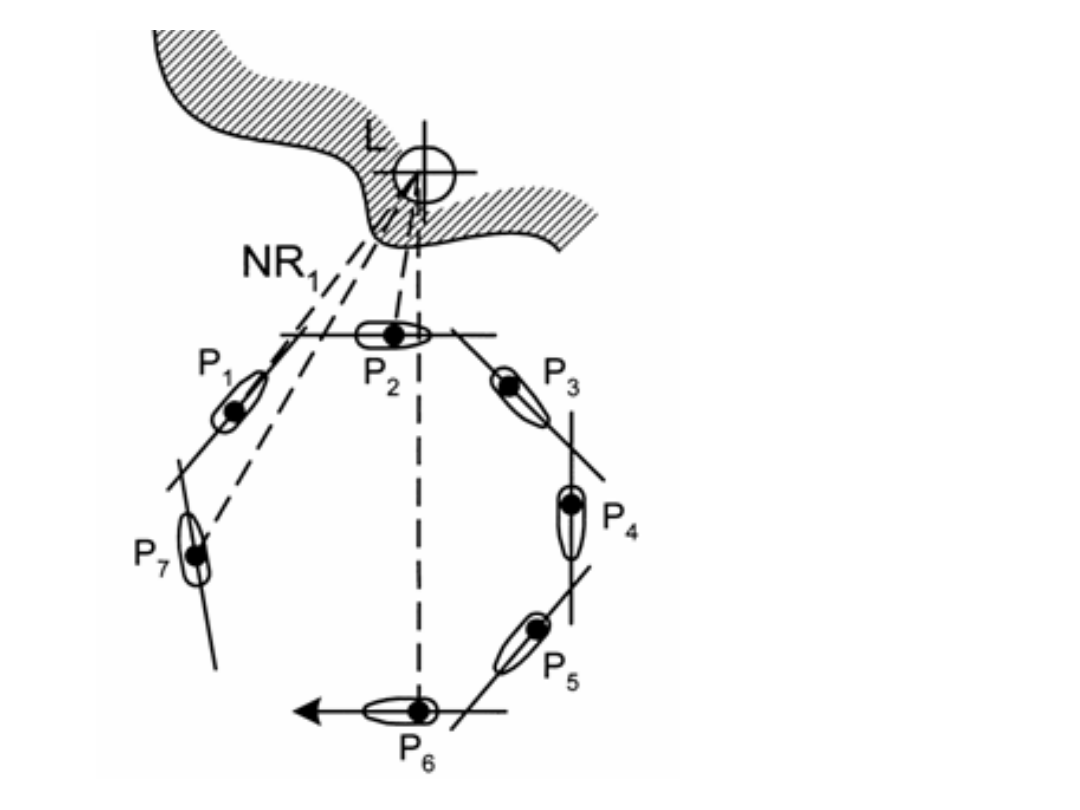
Rys. 10.12.
Sposób
pomiarów w
celu
obliczania
tabelki
dewiacji

Na rysunku 10.12 pokazano
sposób dokonywania
cyrkulacji w celu określenia
dewiacji na ośmiu głównych
kursach.
Istnieje możliwość
zmniejszenia średnicy
cyrkulacji statku w razie
użycia sterów
strumieniowych i silnika
głównego do obrotu
statku.
Document Outline
- OKREŚLANIE DEWIACJI KOMPASÓW MAGNETYCZNYCH
- Slide 2
- Slide 3
- Slide 4
- Przygotowanie statku do procesu określania dewiacji kompasów
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Celowi temu służą następujące czynności:
- Metody określania dewiacji
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Tabela pomiarów namiarów kompasowych
- Krzywa dewiacji = f(KK)
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
- Slide 26
- a) b)
- Slide 28
- Slide 29
- Slide 30
- Organizacja pomiarów
- Slide 32
- Slide 33
- Slide 34
- Slide 35
- Slide 36
- Slide 37
- Wybór ciał niebieskich do obserwacji
- Sposób pomiarów i manewrowanie statkiem
- Wybór metody pomiarowej
- Metodyka opracowania pomiarów
- Slide 42
- Slide 43
- Slide 44
- Slide 45
- Slide 46
- Slide 47
- Slide 48
- Slide 49
- Slide 50
- Slide 51
- Slide 52
- Slide 53
- Slide 54
- Slide 55
- Slide 56
- Slide 57
- Zalety metody:
- Slide 59
- Slide 60
Wyszukiwarka
Podobne podstrony:
więcej podobnych podstron