MANEWROWANIE 2
Pro by zdolnosci manewrowych statku
- cyrkulacja w lewo i prawo. Interesuja nas max wymiary cerkulacji. Robia c cyrkulacje nalezy wzia c pozycje i kurs statku - zeby wykreslic maksymalne granice cyrkulacji.
- pro ba wezowa
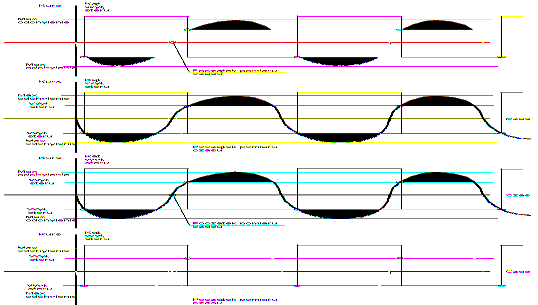
Kolejnosc wykonywania pro by (V - full ahead) :
1. Wychylenie steru 20o na jedna z burt.
2. Po zmianie kursu o xo przeŚozenie steru na burte przeciwna (ro wniez 20o).
3. Przy przejsciu statku przez pierwotna linie kursu rozpoczecie liczenia czasu (pierwsza poŚo wka sinusoidy jest "niereprezentatywna").
4. Obliczamy okres 4-6 peŚnych sinusoid. Obliczamy czas sredni jednej.
Wspo Śczynnik statecznosci kursowej "E" obliczamy ze wzoru:
E = Vo * t / Lpp (V w m/sek, Lpp w metrach).
Powyzsza pro ba nazywa sie pro ba Kempf 'a.
Dla statku optymalnego E = 8.
E=>9 - statek stateczny kursowo;
E<=7 - statek niestateczny kursowo.
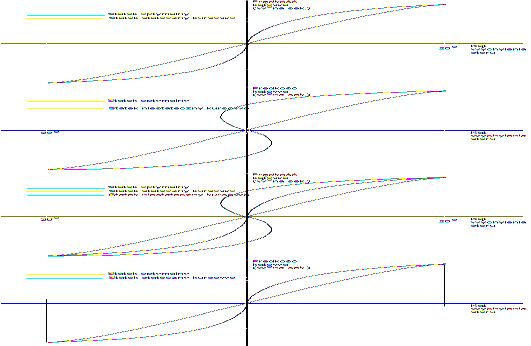
Pro ba spiralna:
Okreslenie zaleznosci miedzy predkoscia ka towa zmiany kursu, a wychyleniem steru. Pro be przeprowadza sie wprowadzaja c stetk w peŚna cyrkulacje - pomiary rozpoczyna sie dopiero w fazie 3-ciej cyrkulacji, praktycznie po zmianie kursu statku o 400o. Po wykonaniu 1 cerkulacji zdejmuje sie ze steru po 5o, a po osia gnieciu wychylenia 5o mierzy sie predkosci ka towe na cyrkulacjach zmniejszja c wychylenia steru kazdorazowo o 1o.
Przy pro bie niezbedne jest posiadanie indykatora predkosci ka towej (Rate of Turn Indicator).
`
Wody zamulone - gestosc pow. 1.35 - grunt staŚy. Problemy ze zmniejszeniem zanurzenia przez zwiekszona gestosc .
Manewry antykolizyjne
Manewr IMO - prawo na burte. Obszar manewru okresla srednica cyrkulacji.
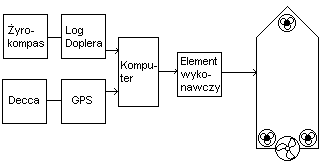
DPS (Dynamic Positioning System)
Schemat ideowy:
Mozliwosci manewrowe systemu
(sterowanie reczne):
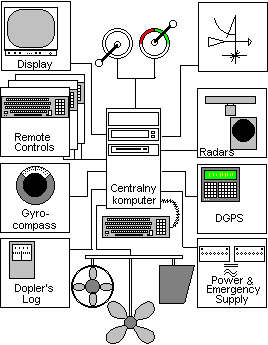
Urza dzenia wŚa czone do systemu:
Sruba Grima - sruba swobodnie obracaja ca sie - wieksza srednica od sruby wŚasciwej.
The Vessel Management
System integruja cy sterowanie statkiem z mostku Śa cznie z DPS-em.
Osiadanie (squat)
Aktualnie porty same limituja predkosci w ramach swojej administracji. Dla danych typo w i wielkosci/zanurzen piloci stosuja ograniczenia predkosci.
Zapas nawigacyjny : 1'
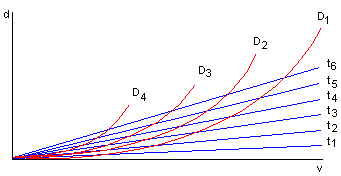
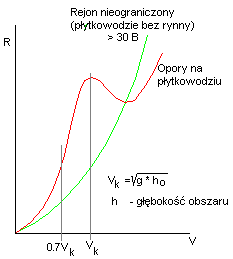
Przebieg oporo w w obszarze otwartym (pŚytkowodzie o szerokosci> 30 B) i w kanale: Metody okreslania osiadania:
Badania oparte na badaniach modelowych, ale (w/g Byczynskiego) nie zawsze pokrywaja sie z rzeczywistoscia .
Metody maja ograniczenia. Poro wnanie ro znych metod daje ro zne wyniki. Przy badaniach modelowych mozna robic tylko interpolacje - jakakolwiek ekstrapolacja moze prowadzic do powaznych bŚedo w.
Korzysta sie w rezultacie z 2 metod.
1.Graficzne
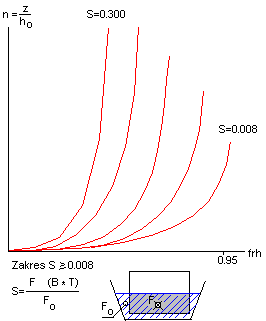
a) NSP - holenderska
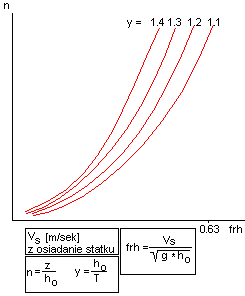
frh - stosunek V statku do V grwawitacyjnej.
Metoda ma ograniczenia - frh zamyka sie w przedziale 0.23 - 0.63.
Obliczenia robione dla wsp.peŚ.kadŚuba 0.80 - 0.82.
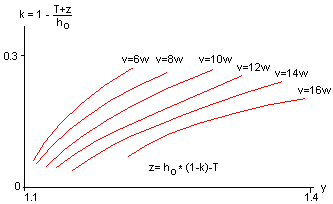
2. Metoda RFN
Ograniczenia: wsp.peŚn 0.825 - 0.830
V = 6 - 16 w
y = 1.1 - 1.4
3. Metoda Schiffa'a - opracowana dla kanaŚu
Opracowane na empirycznych pomiarach za pomoca teodolitu. Stwierdzono bŚa d w stosunku do metoy - dla bezpieczenstwa nalezy wiec dodac 15 cm do wyniku.
Dla obliczen przyjmuje sie szerokosc kanaŚu jest ro wna 10 szerokosciom statku
4. Metoda SOGREHT (francuska) - osiadanie w kanaŚach.
5. Metoda NPL (brytyjska - 1973 r)
Pozwala na obliczenie osiadania dzioby i rufy dla wsp.peŚnotliwosci 0.80 - 0.90. Metoda bierze pod uwage ro wniez wymiary statko w. Metoda daje optymalne wyniki przy stosunku Lpp/B okoŚo 6.
Stosunek B/T okoŚo 2.6 a 1.1 <= ho/T <= 1.5, oraz gŚebokoscio akwenu do 40 m. PrzegŚebienia 0.01 Lpp (dzio b), 0.05 Lpp rufa. Limit dŚugosci 100- 300 m.
Trzy zestawy krzywych.
Metoda empiryczna Barrasa
z = 0.01 * v2 * d [m] na pŚytkowodziu
Ograniczenie dla d = 0.80 - 0.83
v - [ w ]
z1 = 2 z dla kanaŚu
ograniczenia 1.1<= ho/T <= 1.2
0.06 <= Fow/ Fo <= 0.30
Zegluga w warunkach sztormowych
Statki dŚugie - LOA>150 m. Wystepuje overstress (statyczny przy za-/wyŚadunku, dynamiczny w morzu na duzej fali).
Dod.elementem pogarszaja cym sytuacje jest korozja i zmeczenie konstrukcji. (Granica
"obliczalnosci" tj zgodnosci danych ze stanem faktycznym took 14 lat).
Wprowadza sie katodowe metody ochrony zbiorniko w balastowych oraz tensjometry do pomiaro w aktualnych momento w gna cych w wezŚach statku (najczesciej umieszcza sie je na owrezu).
Stwierdzono, ze dla duzych statko w stanem niebezpiecznym jest 5o B z dziobu. Zaczyna sie wprowadzac , opro cz check lists, tensometry, pokazuja ce faktyczne naprezenia na wezŚach konstrukcyjnych.
Sztormowanie to wybo r wŚasciwego kursu i pretkosci w stosunku do fali. Z tym wia ze sie problem tzw fali interferencyjnej.
Slamming - powstaja infrad wieki (low frequency) posiadaja ce duza energie, moga powodowac ciecia blach.
Generalnie pamietac , ze energia rosnie do kwadratu predkosci.
Maks. slamming wystepuje przy fali l= 0.7 LOA.
Zanurzenie minimalne dziobu, dla unikniecia slammingu, to 0.045 Lpp.
Wzrost efekto w na momentach gna cych ocenia sie jako +20-30% (przy stanie 7oB).
Ocena wŚasciwej predkosci wzgledem wody (bez czujniko w tensometrycznych):
- graniczna wielkosc ilosci wejscia wody na dziobo wke w>= 20/h (umiarkowana moc napedu)
-
w<20/h (duza moc maszyn)
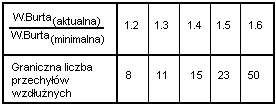
- ilosc wzdŚuznych przechyŚo w miedzy kolejnymi wejsciami wody na pokŚad WB - Wolna Burta
WBmin = 0.056 * LOA [m] * (1 - LOA/500) * 1.36/(d + 0.68) (teoretyczne) Jezeli liczba przech. wzdŚuznych mniejsza od podanych w tabeli, nalezy rozpocza c sztormowanie.
Im statek jest wiekszy tym trudniejsza ocena momentu rozpoczecia sztormowania. Jednoczesnie skutki zbyt po niego rozpoczecia sa z reguŚy wieksze.
Manewry sztormowania.
Zmiana kierunku - najlepszy okoŚo 3 rumbo w od fali.
Zmiana predkosci - zejscie ponizej granicznej liczby przechyŚo w. Redukcja v (jak wyzej) ma efekt kwadratowy. PoŚowa predkosci - efekt 4-krotny.
Problem statecznosci - istotny szczego lnie przy sztormowaniu z fala - nastepuja okresowe redukcje siŚy sterowania (przy przyspieszeniach predkosci fali) i w zwia zku z tym utrata sterownosci. Moze to spowodowac wywro cenie statku (szczego lnie o maŚym GM).
Zwrot w sztormie.
Statek musi przejsc przez faze burta do fali. Falowanie jest nieregularne, sta d zwrot w nocy jest ryzykowny - nie mozna zauwazyc i wybrac odpowiedniego momentu do rozpoczecia zwrotu.
Nalezy - w momencie rozpoczynania zwrotu - miec max. mozliwa predkosc ka towa . Mozna to zrobic wpierw redukcja predkosci, (mowa o zwrocie z jazdyy z wiatrem na jazde pod wiatr) a nastepnie doŚozeniem obroto w i wychyleniem steru na burte (duzy moment skrecaja cy).
Sztormowanie burta do fali: mozna przy zatrzymanej maszynie. Problem - okres koŚysan wŚasnych statku musi byc wyra nie ro zny od okresu fali. Moze dojsc (jako, ze morze faluje nieregularnie) do rezonansu. Dlatego SG musi by w natychmiastowym pogotowiu.
Mozliwe, bo fala przechodza ca pod kadŚubem tworzy front powrotny chronia cy statek przd wejsciem wody na pokŚad.
W normalnych warunkach takiego manewru sie nie stosuje.
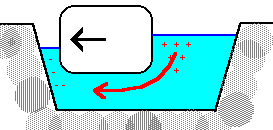
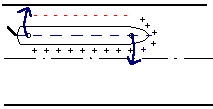
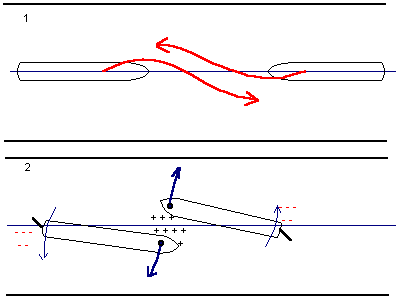
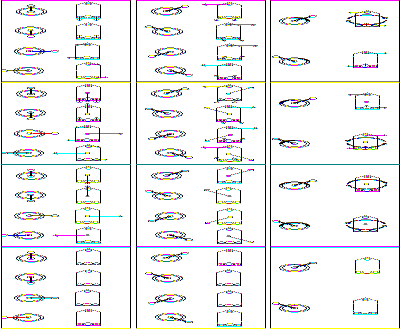
Wymijanie, wyprzedzanie
Tendencje ruchu kadŚuba w kanale:
Wymijanie
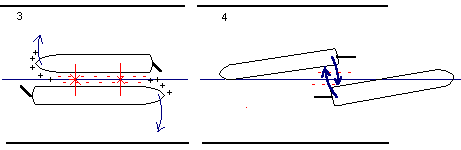
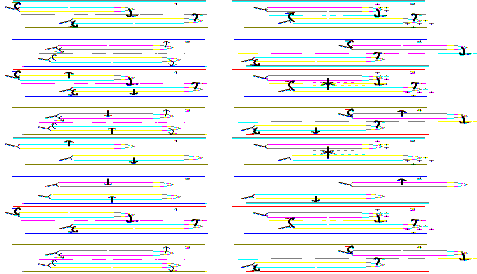
Wyprzedzanie
Zegluga w torach
Mozliwosc przejscia torem jest zwia zania z jego szerokoscia (oczywiscie gŚebokoscia ) jak tez zwia zane jest z wymiarowaniem przestrzeni manewrowej statku. Oznacza to po prostu, jak zachowuje sie statek w wa skim torze, co zalezy od jego wymiaro w i od jegoi statecznosc i kursowej.
"Ilosc " miejsca, jaka statek zajmuje zalezy od jego predkosci i statecznosci kursowej.
Przyjmuje sie nastepuja ce kryteria manewrowe:
lw = 1,2 B
- bardzo dobra statecznosc kursowa
lw = 1.6 B
- dobra statecznosc kursowa
lw = 1.8 B
- sŚaba statecznosc kursowa
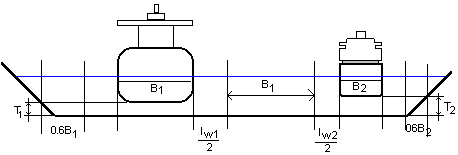
Minimalna szerokosc toru wodnego winna wynosic (na gŚbokosci = T statku) 1.2 B + B statku.
OdlegŚosc dwu statko w od siebie w czasie mijania, lub wyprzedzania nie powinna byc mniejsza niz B statku szerszego + 0.6 B obu statko w. Sta d wynika wymiar minimalny toru wodnego:
Wp yw falowania na zanurzenie
Metoda Van Houten'a - graficzny sposo w okreslania wpŚywu falowania na zanurzenie. Przy wykresach interpolacja jest mozliwa, extrapolacja niebezpieczna (badania dla statku ca 15 -60 tt DWT).
Rotterdam - kotwicowisko Emergency - nie wolno tam wchodzic . Kierowane sa tam statki, kto re z ro znych wzgledo w nie moga wejsc do portu (nieprzewidywalne warunki atmosferyczne, brak znajomosci osiadania statku, wpŚywu falowania itp - dla zbadania tych warunko w lub przeczekania).
Tabela munucypalna - Rotterdam. Wchodzi sie wysokoscia fali i okresem fali i ka tem kursowym a z boku nosnoscia statku. Uzyskuje sie przyrosty zanurzenia zwia zane z koŚysaniem bocznym i nurzaniem - wartosci sie sumuje i uzyskuje finalna wartosc przyrostu zanurzenia.
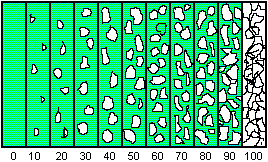
Zegluga w lodach
Kryteria zwartosci
1.Sprawdzic urza dzenia nawigacyjne;
2.Sprawdzic i zamkna c drzwi wodoszczelne;
3. Po wejsciu w lody - czeste sondowanie;
4. Wymienic wode balastowa - przede wszystkim odpompowac FW (generalnie odpompowac , zeby byŚo miejsce na zamarzanie !
5. Wchodzic w lo d pod ka tem prostym i steren nidship. Sterem mozna pracowac dopiero po caŚkowitym wejsciu w lody.
Klasy statko w :
L1A - arkryczna
L2
L3
L4 - maŚe lody
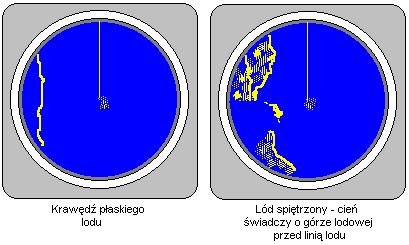
Duze statki wyposaza sie w sonary dziobowe. Duza pomoca jest radar:
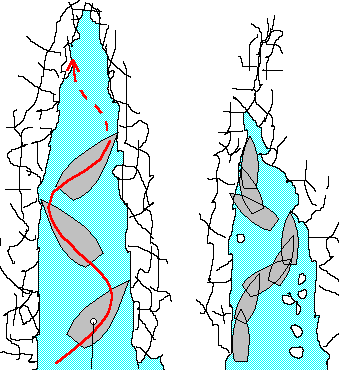
Przy wspo Śpracy z holownikami w rynnie lodowej nalezy bardzo uwazac na komunikacje z holownikiem i wŚasna predkosc . Holowniki do pracy w lodach sa przystosowane poprzez instalacje balastowe, umozliwiaja ce im Śamanie lodu przy pomocy szybkiego przebalastowania, Holowanie odbywa sie na kro tkim holu. Najlepiej, jezeli ma sie srube nastawna - jezeli nie to wskazana praca maszyna na minimalnych obrotach wstecz.
Praca holownika w lodach wygla da nastepuja co: