1. CEL ĆWICZENIA
Celem ćwiczenia jest poznanie podstawowych zagadnień związanych z opracowaniem
wyników pomiaru.
2. WPROWADZENIE
2.1. Wstęp
Umiejętność właściwego opracowania wyników pomiaru jest niezbędna w wielu dziedzinach
nauki, techniki oraz gospodarki. O wysokiej randze tej problematyki świadczą prace
międzynarodowych komisji, których celem jest znalezienie i ujednolicenie metod
opracowania wyników pomiaru. Wyniki tych prac są publikowane i z czasem zyskują
charakter normatywny, jak np. [1].
W wielu przypadkach surowy wynik pomiaru, bez jego właściwego opracowania, jest
uwaŜany za bezuŜyteczny.
Pomiary moŜna ogólnie podzielić na bezpośrednie lub pośrednie. Pomiarem bezpośrednim
jest na przykład pomiar napięcia stałego za pomocą woltomierza. Przykładem pomiaru
pośredniego jest pomiar rezystancji metodą techniczną: prąd płynący przez mierzony rezystor
jest mierzony za pomocą amperomierza, a spadek napięcia na rezystorze – za pomocą
woltomierza. Rezystancja obliczana jest z prawa Ohma.
2.2. Błąd i poprawka
Najczęściej surowy wynik pomiaru x jest jedynie przybliŜeniem wartości rzeczywistej
(prawdziwej) x wielkości mierzonej X. RóŜnica pomiędzy wynikiem pomiaru x a wartością rz
rzeczywistą nazywana jest rzeczywistym błędem bezwzględnym ∆ x
rz
∆ x = x − x
(1)
rz
rz
Wartość rzeczywista wielkości mierzonej jest znana tylko w wyjątkowych przypadkach.
Dlatego pojęcie rzeczywistego błędu bezwzględnego ∆ x ma niewielkie znaczenie
rz
praktyczne. W praktyce, w zaleŜności od wymaganej dokładności pomiaru, doświadczenie
pomiarowe modyfikuje się tak, aby otrzymać wartość najbliŜszą x . Wartość tę nazywa się rz
wartością poprawną xpopr. Wtedy wyraŜenie na błąd bezwzględny przyjmuje postać .
∆ x = x − x
(2)
popr
Bezwzględny błąd ze zmienionym znakiem nazywany jest poprawką (
p x)
2
( px) = −∆ x
(3)
Poprawka dodana do wyniku pomiaru daje tzw. wynik skorygowany - czyli wartość
poprawną.
Błąd względny δ x jest to stosunek błędu bezwzględnego do wartości poprawnej
x
∆
x
δ =
(4)
x popr
Błąd względny jest często wyraŜany w procentach (1 % = 10-2) lub promilach (1 ‰ = 10-3).
Spotykane są takŜe mnoŜniki: ppm (ang. part per million; 1 ppm = 10-6) oraz ppb (ang. part
per billion; 1 ppb = 10-9), jednak ich stosowanie do wyraŜania błędu wielkości elektrycznych
nie jest zalecane. Na przykład względny błąd pomiaru napięcia naleŜy zapisać w postaci U
δ
= 1 µV/V zamiast U
δ = 1 ppm.
Błąd moŜe być spowodowany róŜnymi czynnikami. Z tego powodu do słowa „błąd”
dodaje się określenie wskazujące na jego przyczynę lub charakter. Na przykład błąd
rozdzielczości jest błędem spowodowanym ograniczoną rozdzielczością, błąd przypadkowy -
błędem wynikającym z losowej zmienności wyników powtarzanego doświadczenia
pomiarowego itp.
2.3. Klasyfikacja błędów
Ogólnie błędy dzieli się na:
1) systematyczne,
2) przypadkowe,
3) nadmierne (grube).
PowyŜszy podział powstał na podstawie obserwacji zachowania się wyników pomiaru przy
powtarzaniu doświadczenia pomiarowego.
Ad.1. Błędy systematyczne moŜna podzielić na:
a) błędy systematyczne stałe,
b) błędy systematyczne zmienne.
Błąd systematyczny stały moŜna wykryć po powtórzeniu doświadczenia pomiarowego w
celowo zmienionym (zmodyfikowanym) układzie warunków fizycznych.
Wykrycie stałego błędu systematycznego przez powtarzanie doświadczenia pomiarowego w
niezmiennym układzie warunków fizycznych jest niemoŜliwe.
Jeśli wyniki powtarzanego doświadczenia pomiarowego w pozornie niezmiennym układzie
warunków fizycznych charakteryzują się systematyczną zmianą (dryfem), to wyniki pomiaru
3
obarczone są błędem systematycznym zmiennym. Ten rodzaj błędów powstaje np. w
wyniku zmian jakiejś dominującej wielkości zakłócającej (wpływającej) np. temperatury
otoczenia. Występowanie błędu systematycznego zmiennego świadczy o tym, Ŝe podstawowy
układ warunków fizycznych doświadczenia pomiarowego nie jest niezmienny. Cechą
charakterystyczną tego błędu jest moŜliwość wyznaczenia (zdeterminowania) zaleŜności
między tym błędem i wywołującym go czynnikiem. Błąd systematyczny zmienny moŜe być
monotoniczny (rosnący albo malejący) lub okresowy.
Inny podział błędów systematycznych bierze pod uwagę ogniwo doświadczenia
pomiarowego, w którym powstaje błąd. Na rys.1 przedstawiono strukturalny schemat
doświadczenia pomiarowego, przydatny do sklasyfikowania błędów systematycznych.
Rys.1. Strukturalny schemat doświadczenia pomiarowego
Pierwsza składowa błędu systematycznego jest związana z obiektem pomiaru. Dołączenie
przyrządu pomiarowego powoduje zmianę równowagi energetycznej w obiekcie badanym.
Dochodzi zatem do naruszenia podstawowego układu warunków fizycznych, w jakich
odbywa się doświadczenie pomiarowe i - w konsekwencji - do zmiany miary wielkości
mierzonej. Błąd spowodowany zmianą równowagi energetycznej jest nazywany czasem
błędem metody. Nazwa ta jest zbyt ogólna. Bardziej właściwe jest stosowane określenia „błąd
spowodowany zmianą równowagi energetycznej”. Błąd ten zazwyczaj wyznacza się
teoretycznie (oblicza).
Druga składowa błędu systematycznego jest związana z właściwościami narzędzia
pomiarowego. Nazywana jest błędem instrumentalnym. Jeśli błąd systematyczny narzędzia
pomiarowego występuje w znamionowych warunkach uŜytkowania, to nazywany jest
błędem podstawowym narzędzia pomiarowego. Przez znamionowe warunki uŜytkowania
rozumie się podstawowy układ warunków fizycznych, podany w normach lub przez
producenta przyrządu, a takŜe układ warunków, w których dokonano wzorcowania przyrządu
lub w których przyrząd charakteryzuje się największą dokładnością. Błąd dodatkowy
narzędzia pomiarowego powstaje, gdy warunki fizyczne odbiegają od określonych przez
znamionowe warunki uŜytkowania. Błąd instrumentalny ma dwie składowe: błąd modelowy
oraz błąd wykonania narzędzia pomiarowego. Pierwszy powstaje na skutek rozbieŜności
między fizyczną zasadą pomiaru (modelem) a rzeczywistymi zjawiskami zachodzącymi w
narzędziu pomiarowym. Drugi jest spowodowany ograniczoną dokładnością z jaką wykonano
lub wzorcowano narzędzie pomiarowe. Błąd instrumentalny moŜna wyznaczyć przez
wzrorcowanie przyrządów przyrządów pomiarowych uŜytych w doświadczeniu.

4
Trzecia
składowa
błędu
systematycznego
jest
związana
z
subiektywizmem
(tendencyjnością) pomiarowca. Jest szczególnie istotna w przypadku przyrządów
analogowych.
Przykład 1
Do pomiaru siły elektromotorycznej E ogniwa o rezystancji wewnętrznej R = 8
,
0
uŜyto
w
Ω
woltomierza o rezystancji wewnętrznej R = 1500
. Woltomierz wskazał napięcie U
.
V =
8
,
2 75 V
V
Ω
Obliczyć:
a) wartość poprawną siły elektromotorycznej E ,
b) bezwzględny błąd systematyczny ∆ E pomiaru E ,
c) poprawkę p( E) pomiaru E ,
d) względny błąd systematyczny E
δ pomiaru E .
Rozwiązanie:
a) na podstawie schematu zastępczego, przedstawionego na rys.2, wartość poprawną E oblicza się ze wzoru
R
8
,
0
E = U 1
+ w
V
= 8
,
2 75 ⋅ 1 +
≈ 8
,
2 765 V
RV
1500
Rys.2 Schemat zastępczy układu do pomiaru siły elektromotorycznej ogniwa
b) bezwzględny błąd systematyczny ∆ E = U
V − E ≈
8
,
2 75 − 8
,
2 765 ≈ − 5
,
1 mV
c) poprawka p( E) = −∆ E = 5
,
1 mV
∆ E − 5
,
1 ⋅10 3
−
d) względny błąd systematyczny E
δ =
=
≈ − 0
,
0
%
6
E
8
,
2 765
Ad. 2) Błędy przypadkowe występują, gdy powtarzanie doświadczenia pomiarowego w
pozornie niezmiennym układzie warunków fizycznych ujawnia losową zmienność wyników.
Słowo „pozornie” ma w tym przypadku szczególne znaczenie, gdyŜ błędy przypadkowe są
spowodowane oddziaływaniem wielu zmiennych i z reguły niezaleŜnych od siebie
czynników. Deterministyczny opis takiego oddziaływania jest z reguły niemoŜliwy gdyŜ
przekracza ludzkie moŜliwości poznawcze. Przykładem pomiaru zdominowanego czynnikiem
losowym jest np. pomiar wartości chwilowej napięcia szumów rezystora. Do opisu błędów
przypadkowych stosuje się modele probabilistyczne.
5
Ad. 3) Błędy nadmierne mogą być spowodowane błędem odczytu, chwilowym silnym
zaburzeniem lub innymi czynnikami. Najprostszy sposób postępowania polega na odrzuceniu
wyników raŜąco róŜniących się od spodziewanych. Bardziej właściwe jest zastosowanie
odpowiedniego testu statystycznego.
Końcowy wynik pomiaru powinien być wynikiem skorygowanym, tj. nie powinien zawierać
znanych błędów systematycznych oraz nadmiernych.
2.4. Niepewność
Graficzną interpretację relacji występujących między parametrami wyniku przedstawiono
na rys.3.
x
- u x
( )
x
x
x
+ u x
( )
popr
popr
rz
popr
x
∆ x rz
u x
( )
u( x)
Rys.3. Interpretacja relacji występujących między parametrami wyniku pomiaru
Na rys.3. punkty x
− u
i x
+ u
wyznaczają granice przedziału, w którym
popr
( x)
popr
( x)
z określonym prawdopodobieństwem znajduje się wartość rzeczywista x . Parametr u( x) jest rz
nazywany niepewnością bezwzględną.
Niepewność ma zawsze znak dodatni, gdyŜ wyraŜa długość jednostronnego przedziału.
Często niepewność wyniku pomiaru zapisuje się jako x
± u
, co oznacza iŜ wynik
popr
( x)
pomiaru, z określonym prawdobodobieństwem, znajduje się w przedziale o szerokości u
2 ( x) ,
symetrycznym względem wartości poprawnej.
Niepewność względną u
definiuje się jako stosunek niepewności bezwzględnej do
r ( x )
wartości poprawnej:
u x
u x =
(5)
r ( )
( )
x popr
2.5. Klasyfikacja niepewności
Zgodnie z ustaleniami międzynarodowymi [1] wyróŜnia się dwa typy niepewności:
1) niepewność typu A,
2) niepewność typu B.
6
Ad.1) do niepewności typu A zalicza się niepewności, których rozkłady są znane lub mogą
być oszacowane na podstawie powtarzalnych pomiarów, wykonanych w nominalnie takich
samych warunkach. Ocena niepewności typu A wykorzystuje ustalony algorytm: wyznacza
się wartość średnią, niepewność pojedynczego wyniku oraz niepewność wartości średniej.
Wyznaczenie niepewności typu A wymaga wykonania serii pomiarów, w celu ujawnienia
losowego charakteru ich zmian.
Ad.2) jeśli niepewność szacowana jest nie na podstawie powtarzalnych pomiarów, ale innych
danych, to nazywa się ją niepewnością typu B. Do niepewności typu B zaliczyć moŜna
niepewności przyrządów podane w ich dokumentacji, świadectwach kalibracji, wartości
współczynników podane w normach i tablicach. Jeśli niepewność wyniku nie jest określona i
nie ma moŜliwości jej oceny, to przedział niepewności określa się na podstawie liczby cyfr
znaczących wyniku.
2.6. Szacowanie standardowej niepewności typu A
Oszacowanie niepewności typu A jest moŜliwe jedynie wtedy, gdy wykonano serię pomiarów
x1, x2, .... xN, gdzie N>1. Przede wszystkim naleŜy w serii wykryć i usunąć wyniki obarczone błędem nadmiernym. Gdy liczba czynników zakłócających pomiar jest duŜa i Ŝaden z nich nie
dominuje, to moŜna załoŜyć, iŜ rozkład losowy błędu pomiaru jest rozkładem zbliŜonym do
rozkładu normalnego (Gaussa). WyróŜnia się dwa przypadki:
1) seria pomiarów jest długa ( N ≥ 10),
2) seria pomiarów jest krótka ( N < 10).
Ad.1) dla długiej serii pomiarów, korzystając z metody estymacji punktowej oblicza się:
- wartość poprawną wyniku, którą jest średnia arytmetyczna:
N
1
x =
∑ x ,
(6)
n
N n=1
-
odchylenie standardowe średniej arytmetycznej:
s
s
x
=
,
(7)
x
N
gdzie
2
1
N
s
x
x
(8)
x =
∑( n − )
N − 1 n 1
=
jest odchyleniem standardowym pojedynczego wyniku.
Standardowa niepewność typu A u
jest równa:
A ( x )
7
u x = s
(9)
A ( )
x
Ad.2) dla krótkiej serii wyników pomiaru o błędach przypadkowych będących zmienną
losową o rozkładzie normalnym obliczone wartości x i s mogą się znacznie róŜnić od x
parametrów tego rozkładu. W tym przypadku, w celu zwiększenia wiarygodności wyników,
korzysta się z rozkładu t-Studenta [1].
Gdy liczba wyników pomiaru N wzrasta, to rozkład Studenta staje się bliski rozkładowi normalnemu. Dla N ≥ 10 moŜna w większości przypadków korzystać z rozkładu normalnego.
W rozkładzie Studenta występuje pojęcie liczby stopni swobody k :
k = N −1
(10)
gdzie N jest liczbą wyników pomiaru w serii.
Standardową niepewność typu A wyznacza się następująco:
1. Dla
standardowej
niepewności
typu
A
przyjmuje
się
poziom
ufności
(prawdopodobieństwo) α =0,6827. Jest to poziom ufności, któremu w rozkładzie
normalnym odpowiada kwantyl równy odchyleniu standardowemu pojedynczego
wyniku pomiaru.
2. Oblicza się liczbę stopni swobody k ze wzoru (10) .
3. Korzystając z tablicy rozkładu Studenta dla obliczonego k i przyjętego α wyznacza
się kwantyl t
.
k α
,
4. Oblicza się standardową niepewność typu A ze wzoru
u
x = t
s
(11)
A (
) k α, x
Wartości kwantyli t
dla rozkładu Studenta w zaleŜności od liczby stopni swobody ν
k α
,
zamieszczono w tablicy 1.
Tablica 1
Wartości kwantyli t
dla rozkładu Studenta dla poziomu ufności α =0,6827 w zaleŜności od liczby
k α
,
stopni swobody k
k
1
2
3
4
5
6
7
8
9
10
11
12
50
100
t
1,84 1,32 1,20 1,14 1,11 1,09 1,08 1,07 1,06 1,05 1,05 1,04 1,01 1,005
k α
,
2.7. Ocena niepewności typu B w pomiarach bezpośrednich
W niektórych przypadkach rozrzut wyników jest bardzo mały i dominującą niepewnością jest
niepewność związana z niedoskonałością aparatury lub przyjętej metody pomiarowej, zwana
niepewnością typu B. Nie moŜna jej scharakteryzować metodami statystycznymi, jak w
przypadku niepewności typu A, poniewaŜ nie dysponuje się serią wyników. Z tego powodu
8
do oceny niepewności typu B wykorzystuje się wszelkie dostępne informacje, którymi mogą
być:
-
znajomość zjawisk występujących w pomiarach;
- właściwości przyrządów i metod pomiarowych;
- informacje zawarte w dokumentacji przyrządów;
- dokumenty i certyfikaty kalibracyjne przyrządów;
- dane z wcześniej przeprowadzonych pomiarów;
- doświadczenie lub intuicja eksperymentatora.
Najczęściej przyjmuje się, Ŝe niepewność typu B charakteryzuje się rozkładem jednostajnym i
z poziomem ufności α =1 zawiera się w przedziale ± a wokół wartości poprawnej. Wówczas
standardowa niepewność typu B jest równa [1]
u
=
.
(12)
B ( )
a
x
3
Przykład 2
Obliczyć niepewność typu B woltomierza wskazówkowego klasy 0,5 o zakresie 100 V.
Rozwiązanie:
MoŜna przyjąć, Ŝe wewnątrz symetrycznego przedziału wokół wartości poprawnej zmierzonego
napięcia, o szerokości połówkowej równej
klasa ⋅ zakres
5
,
0 ⋅100
∆ U =
=
= 5
,
0
V
100
100
prawdopodobieństwo wystąpienia wartości prawdziwej mierzonego napięcia, którą reprezentuje
wartość poprawna, jest w kaŜdym punkcie jednakowe (opisuje je rozkład jednostajny). Standardowa
niepewność typu B jest równa
u
V
B (
) ∆
5
,
0
= U
U
=
= ,
0 287
3
3
Jedną ze składowych niepewności typu B jest składowa spowodowana ograniczoną
rozdzielczością pomiaru. Jeśli producent nie podał sposobu jej obliczania, to dla przyrządów z
odczytem cyfrowym, wykorzystujących wbudowany mikroprocesor do przeliczania wyniku
przyjmuje się, iŜ maksymalny błąd rozdzielczości jest równy wartości odpowiadającej ± 5
,
0
najmniej znaczącej cyfry wyświetlacza. Wynika to z załoŜenia, Ŝe wynik pomiaru jest przed
wyświetleniem prawidłowo zaokrąglony. W przypadku tanich multimetrów wyposaŜonych w
przetwornik analogowo-cyfowy o podwójnym całkowaniu przyjmuje się, iŜ maksymalny błąd
rozdzielczości jest równy wartości odpowiadającej ± 1 najmniej znaczącej cyfry
wyświetlacza. We wszystkich przypadkach przyjmuje się, iŜ rozkład tego błędu w
9
określonym przedziale jest jednostajny Związaną z tą składową niepewność typu B oblicza
się ze wzoru (12).
Przykład 3
Obliczyć niepewność typu B woltomierza cyfrowego, który na zakresie U
=20 V charakteryzuje się
zakr
rozdzielczością 4½ cyfr znaczących. W dokumentacji przyrządu zawarta jest informacja, iŜ
maksymalny błąd pomiaru jest równy 0,05% U
+ 0,005% U
, gdzie U
=4,324 V jest
odczyt
zakr
odczyt
wartością napięcia wyświetloną na wyświetlaczu przyrządu. Ponadto z dokumentacji wynika, Ŝe
przyrząd zawiera mikroprocesor przeliczający wynik pomiaru przed jego wyświetleniem.
Rozwiązanie:
Rozdzielczość pomiaru jest równa U
=1 mV. MoŜna przyjąć, iŜ wewnątrz symetrycznego
rozdz
przedziału wokół napięcia U
, o szerokości połówkowej równej
odczyt
,
0 05
,
0 005
1
∆ U =
U
U
U
odczyt +
zakr +
rozdz =
100
100
2
,
0 05
,
0 005
1
=
⋅ 3
,
4 24 +
⋅ 20 + ⋅ ,
0 001 = ,
3 662 mV
100
100
2
prawdopodobieństwo wystąpienia wartości prawdziwej mierzonego napięcia, którą reprezentuje
wartość poprawna, jest w kaŜdym punkcie jednakowe (opisuje je rozkład jednostajny). Standardowa
niepewność typu B jest równa
u
mV
B (
) ∆
,
3 662
= U
U
=
= 1,
2 1
3
3
2.8. Obliczanie standardowej niepewności złoŜonej w pomiarach bezpośrednich
Obliczanie standardowej niepewności złoŜonej często występuje w praktyce: występują
błędy losowe reprezentowane przez niepewność uA typu A, której przypisać moŜna rozkład normalny, oraz błędy przyrządów pomiarowych, którym moŜna z reguły przypisać rozkład
jednostajny, a które są scharakteryzowane przez niepewność u typu B. Błędy te są z reguły
B
nieskorelowane (niezaleŜne od siebie).
Standardową niepewność złoŜoną u pomiaru, z uwzględnieniem niepewności przyrządu
c
pomiarowego (czyli niepewności typu B), oblicza się wg następującego algorytmu:
1.
Oblicza się standardową niepewność u typu A;
A
2.
Oblicza się standardową niepewność u typu B;
B
3.
Oblicza się standardową niepewność złoŜoną u ze wzoru
c
10
2
2
u = u + u ;
(13)
c
A
B
4.
Podaje się końcowy wynik w następującej postaci:
x = x ± u ,
c
z dodanym następującym komentarzem: „gdzie liczba zapisana za symbolem ± jest
wartością złoŜonej niepewności standardowej uc, a nie jest przedziałem ufności”.
Podany wyŜej sposób zapisu wyniku pomiaru jest zalecany przez [1].
Przykład 4
Woltomierzem cyfrowym o rozdzielczości 4½ cyfry dokonano, na zakresie U
=750 V, pomiaru
zakr
napięcia sieci elektroenergetycznej. Średnia z N = 20 pomiarów wynosiła U = 23 , 0 4 V z
odchyleniem standardowym s
1,8 V. W dokumentacji przyrządu zawarta jest informacja, iŜ
U =
maksymalny błąd pomiaru jest równy 0,5% U
+ 0,05% U
. Prawidłowo zapisać wynik
odczyt
zakr
pomiaru.
Rozwiązanie:
Niepewność typu A pomiaru jest równa
u ( U )
s
8
,
1
= U
V
A
=
≈ ,
0 402
N
20
Rozdzielczość pomiaru jest równa U
=0,1 V. MoŜna przyjąć, Ŝe wewnątrz symetrycznego
rozdz
przedziału wokół U
, o szerokości połówkowej równej
odczyt
5
,
0
,
0 05
1
∆ U =
U
U
U
odczyt +
zakr +
rozdz =
100
100
2
5
,
0
,
0 05
1
=
⋅ 23 ,
0 4 +
⋅ 750 + ⋅ 1
,
0 = ,
1 2395 V
100
100
2
prawdopodobieństwo wystąpienia wartości prawdziwej mierzonego napięcia, którą reprezentuje
wartość poprawna, jest w kaŜdym punkcie jednakowe (opisuje je rozkład jednostajny). Standardowa
niepewność typu B jest równa
u
V.
B (
) ∆
,
1 2395
= U
U
=
= ,
0 716
3
3
Standardowa niepewność złoŜona pomiaru jest równa
2
2
u
u
u
V.
c =
A +
B =
( ,0402)2 + ( ,0716)2 ≈ 8,
0 21
Ostatecznie wynik zapisuje się jako U = (23 ,
0 4 ± 8
,
0 )V , gdzie liczba zapisana za symbolem ± jest
wartością złoŜonej niepewności standardowej, a nie jest przedziałem ufności.
11
2.9. Obliczanie rozszerzonej niepewności złoŜonej w pomiarach bezpośrednich
Opcjonalnie moŜna rozszerzyć (ang. expand) złoŜoną niepewność standardową u czyli
c
obliczyć połówkową szerokość przedziału, w którym znajdzie się błąd pomiaru ze
zwiększonym prawdopodobieństwem w stosunku do prawdopodobieństwa przyjętego dla
niepewności standardowej. W tym celu:
1. Rozszerza się złoŜoną niepewność standardową u do Ŝądanego poziomu ufności α ,
c
mnoŜąc u przez odpowiedni współczynnik (kwantyl) k . Dokładne wyznaczenie
c
α
współczynnika kα , zaleŜnego od Ŝądanego poziomu ufności, jest zagadnieniem trudnym
[2]. W celu uproszczenia rozwaŜa się dwa przypadki:
- u ≥ u , czyli dominuje niepewność typu A o rozkładzie normalnym lub
A
B
niepewność typu A jest bliska niepewności typu B;
- u < u , czyli dominuje niepewność typu B o rozkładzie jednostajnym.
A
B
Wartości kα wyznacza się z tablicy 2. dla jednej z trzech wybranych wartości
poziomu ufności α: 0,68; 0,95 i 0,99, które są zalecane przez [1].
Tablica 2
Wartości kα w zaleŜności od poziomu ufności α [2]
Poziom ufności α
0,68
0,95
0,99
u ≥ u
A
B
0,994
1,960
2,576
u < u
A
B
1,179
1,645
1,715
2. Zapisuje się końcowy wynik pomiaru w postaci x = x ± k u
α
dodając komentarz o
c
przyjętym poziomie ufności oraz informację, Ŝe jest to niepewność złoŜona.
Sposób ten jest przybliŜony.
Dla duŜej serii wyników pomiaru, których rozrzut moŜna scharakteryzować za pomocą
rozkładu normalnego, kwantyl kα wyznaczyć moŜna z tablic funkcji Laplace’a [2].
Publikacja [1] zaleca stosowanie tylko kilku wartości poziomów ufności. Odpowiadające im
kwantyle kα zestawiono w tablicy 3.
Tablica 3
Wartość współczynnika kα określającego dla rozkładu normalnego przedział o
poziomie ufności α.
Poziom ufności α
% 68,27
90
95
95,45
99
99,73
Współczynnik rozszerzenia kα
-
1
1,645 1,960
2
2,576
3
12
2.10. Obliczanie niepewności pomiarów pośrednich
W przypadku pomiaru pośredniego mierzona wielkość Y jest funkcją M wielkości Xm mierzonych bezpośrednio:
y = f ( x
m )
gdzie m = 1, 2, ... M.
Dla kaŜdej wielkości Xm dokonuje się serii pomiarów, a następnie oblicza się średnią arytmetyczną x , standardową niepewność złoŜoną u
oraz koryguje się x przez
m
c, m
m
uwzględnienie odpowiedniej poprawki. Następnie oblicza się:
- wartość średnią wielkości Y, która jest wartością poprawną :
y = f ( x
(14)
m )
- złoŜoną niepewność standardową dla średniej y :
M
u y
c 2 u 2
,
(15)
c (
)= ∑ m ⋅ c, m
m =1
gdzie
y
∂
c =
(16)
m
x
∂ m
są tzw. współczynnikami wraŜliwości.
Niepewność u
jest dobrze oszacowana jedynie przy spełnieniu następujących warunków:
c ( y )
- liniowość funkcji y = f ( x jest wystarczająca na tyle, aby nie uwzględniać wyrazów m )
wyŜszych rzędów w rozwinięciu w szereg Taylora;
- zmienne losowe X oraz ich wartości średnie x są wzajemnie niezaleŜne.
m
m
Przyjęcie załoŜenia liniowości w przypadku silnie nieliniowych funkcji prowadzi do
zaniŜenia oceny niepewności. Gdy zmienne losowe X lub X są wzajemnie zaleŜne oblicza m
m
się tzw. kowariancję [3].
Przy obliczaniu niepewności wielkości mierzonych pośrednio sporządza się tak zwany
budŜet niepewności. Ma on postać tablicy, zawierającej w podstawowej postaci wartości
poprawne poszczególnych wielkości mierzonych bezpośrednio, ich złoŜone niepewności
standardowe, współczynniki wraŜliwości oraz udział standardowej niepewności kaŜdej
wielkości mierzonej bezpośrednio w niepewności wielkości mierzonej pośrednio. W tabelach
bardziej zaawansowanych budŜetów niepewności podaje się dodatkowe informacje o
rozkładzie prawdopodobieństwa błędów losowych, liczbie stopni swobody oraz kowariancji
poszczególnych zmiennych [1].
13
Przykład 5
Moc wydzielaną na pewnym obwodzie prądu stałego zmierzono za pomocą woltomierza i
amperomierza. Zmierzona wartość napięcia wyniosła (4,000 ±0,002) V, a zmierzona wartość prądu (1,000 ±0,004) A. W obu wynikach liczba za symbolem ± jest wartością złoŜonej niepewności
standardowej. Obliczyć standardową niepewność pomiaru rezystancji i sporządzić jej budŜet przy załoŜeniu, iŜ moŜna zaniedbać wpływ błędu systematycznego, spowodowanego wpływem rezystancji
przyrządów.
Rozwiązanie:
Poprawną wartość mocy oblicza się ze znanego wzoru:
P = U ⋅ I = 4,000 ⋅1,000 = 4,000 W
PoniewaŜ pomiar napięcia i prądu był realizowany róŜnymi przyrządami, moŜna przyjąć, iŜ wyniki pomiaru obu wielkości są od siebie niezaleŜne. Wówczas standardową niepewność pomiaru mocy
oblicza się z zaleŜności
u
2
2
2
2
=
+
,
(18)
c ( P)
c u
U
c ( U )
c u
I
c ( I )
gdzie współczynniki wraŜliwości c oraz c są równe
U
I
∂
= P
c
A,
U
= I = ,1000
∂ U
∂
= P
c
V.
I
= U = ,
4 000
∂ I
Po podstawieniu do (18) otrzymuje się
u
W.
c ( P ) =
( ,1000)2( ,0002)2 + ( ,4000)2( ,0004)2 = ,0000004 + ,0000256 = ,00161≈ ,002
Zatem zmierzona moc jest równa (4,00±0,02) W, gdzie liczba za symbolem ± jest wartością złoŜonej
niepewności standardowej, a nie jest przedziałem ufności.
BudŜet niepewności pomiaru mocy przedstawiono w tablicy 4.
Tablica 4
Przykład budŜetu niepewności dla pomiaru mocy prądu stałego
Symbol
Oszacowanie Niepewność Współczynnik Niepewność
Udział w
wielkości
wielkości
standardowa
wraŜliwości
składowa
niepewności
mocy
złoŜonej
X
x
u( x
c
u
u
/ u( y)
i ( y )
i ( y )
i )
i
i
i
U
4,000 V
2 mV
1,000 A
2 mW
11%
I
1,000 A
4 mA
4,000 V
16 mW
89%
P
4,00 W
0,02 W
14
2.11. Reguły zaokrąglania wyniku pomiaru i niepewności
Ogólnie zapis końcowego wyniku pomiaru powinien mieć postać następującą:
x = x
± u
(informacja o poziomie ufności)
popr
( x)
Końcowy wynik pomiaru powinien składać się z dwóch liczb przybliŜonych, z których
pierwsza wyraŜa poprawną wartość wielkości mierzonej, a druga określa jej niepewność.
Istotny jest sposób zaokrąglania tych liczb. Obowiązują następujące zasady:
1. Liczbę wyraŜającą niepewność zaokrągla się najczęściej w górę, do liczby o jednej
cyfrze znaczącej. Wynika to z faktu, Ŝe wartość niepewności nie jest dokładnie
określona. W szczególnych przypadkach pozostawia się dwie cyfry znaczące. Czyni
się tak gdy:
- liczba będzie uŜywana do dalszych obliczeń;
- w przypadku podawania niepewności stałych fizycznych;
- w przypadku pomiarów dokładnych;
- jeśli po zaokrągleniu do 1 cyfry znaczącej błąd zaokrąglenia byłby większy od
20%. Na przyklad 0,1111 moŜna zaokrąglić do 0,11 a nie do 0,2. W tym
przypadku nie zaokrągla się tej liczby w górę, lecz zgodnie z ogólnymi
regułami zaokrąglania.
2. Liczbę wyraŜającą wynik pomiaru zaokrągla się pozostawiając najmniej znaczącą
cyfrę na tym miejscu, na którym występuje najmniej znacząca cyfra niepewności.
Obowiązują następujące reguły postępowania przy zaokrąglaniu wyników pomiaru:
a) Zastępuje się przez 0 zbędne cyfry liczb całkowitych, a zbędne cyfry po przecinku
dziesiętnym odrzuca się.
b) JeŜeli pierwsza zbędna cyfra (licząc od lewej strony) ma wartość <5, to pozostających
cyfr się nie zmienia. JeŜeli ta cyfra jest >5, to najmniej znaczącą pozostającą cyfrę
powiększa się o 1.
c) JeŜeli pierwszą zbędną cyfrą (licząc od lewej strony) jest 5, a cyfry z prawej strony od
5 nie są zerami, to najmniej znaczącą pozostającą cyfrę powiększa się o 1.
d) JeŜeli pierwszą zbędną cyfrą (licząc od lewej strony) jest 5, a cyfry z prawej strony od
5 są zerami, to najmniej znaczącej pozostającej cyfry nie zmienia się, jeŜeli jej wartość
jest liczbą parzystą. JeŜeli jej wartość jest liczbą nieparzystą, to powiększa się ją o 1.
2.12. Opracowanie wyników pomiaru prezentowanych w postaci wykresów
Często wyniki pomiaru prezentowane są postaci wykresów. TakŜe w tym przypadku wykres
powinien zawierać informację o niepewności przedstawionych na nim wyników pomiaru. Na
rysunku 4 przedstawiono przykładowy wykres charakterystyki prądowo-napięciowej. Na
uwagę zasługują charakterystyczne słupki („wąsy”), które reprezentują złoŜone niepewności

15
pomiaru obu wielkości. Podpis pod rysunkiem powinien informować o sposobie interpretacji
słupków niepewności.
Rys.4. Przykładowy wykres charakterystyki prądowo-napięciowej. Słupki błędów
reprezentują złoŜone niepewności standardowe pomiaru.
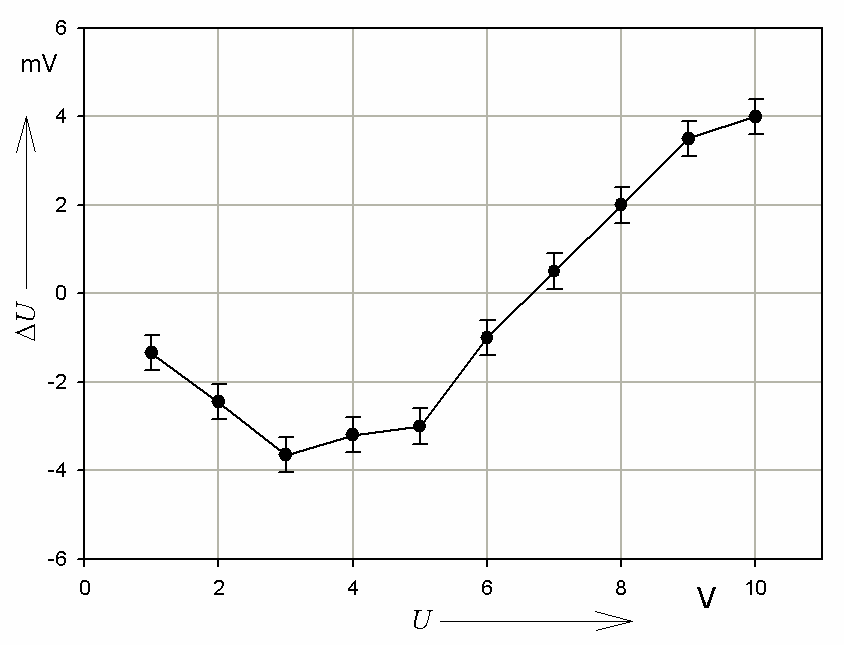
Podobnie naleŜy sporządzać wykresy błędów lub poprawek. Na rysunku 5 przedstawiono
przykładowy wykres błędu. W tym przypadku zazwyczaj na wykresie zamieszcza się jedynie
słupki błędów reprezentujące niepewność wyznaczenia błędu lub poprawki.
Rys.5. Przykładowy wykres błędu. Słupki błędu reprezentują złoŜone niepewności
standardowe wyznaczenia błędu.
Na uwagę zasługuje takŜe sposób opisania osi wykresów przedstawionych na rys.4 oraz rys.5.
16
3. PROGRAM ĆWICZENIA
1. Za pomocą cyfrowego woltomierza napięcia przemiennego o rozdzielczości minimum
5 cyfr znaczących wykonać serię a) N=2, b) N= 4, c) N=10 , d) N=30 pomiarów napięcia na wyjściu autotransformatora regulowanego. Prawidłowo zapisać końcowe
wyniki pomiaru.
2. Wykonać pomiar jak w p.1, ale przy wykorzystaniu cyfrowego woltomierza napięcia
przemiennego o mniejszej rozdzielczości (np. 3,5 cyfry). Prawidłowo zapisać
końcowe wyniki pomiaru.
3. Wykonać pomiar jak w p.1, zastępując autotransformator programowanym
generatorem funkcyjnym, wytwarzającym napięcie sinusoidalne o wartości skutecznej
zbliŜonej do napięcia na wyjściu autotransformatora i o częstotliwości 50 Hz.
Prawidłowo zapisać końcowe wyniki pomiaru.
4. Wykonać pomiar jak w p.2, zastępując autotransformator programowanym
generatorem funkcyjnym, wytwarzającym napięcie sinusoidalne o wartości skutecznej
zbliŜonej do napięcia na wyjściu autotransformatora i o częstotliwości 50 Hz.
Prawidłowo zapisać końcowe wyniki pomiaru.
5. Porównać wyniki uzyskane w p.1, 2, 3 i 4. Wyciągnąć wnioski.
6. Dokonać pomiaru mocy prądu a) stałego b) przemiennego, wydzielanej na odbiorniku
wskazanym przez prowadzącego ćwiczenie. Pomiar wykonać w układzie a) poprawnie
mierzonego napięcia, b) poprawnie mierzonego prądu. Obliczyć wartość poprawną
mocy, bezwzględny błąd systematyczny, poprawkę oraz względny błąd
systematyczny. Sporządzić budŜet niepewności i prawidłowo zapisać końcowy wynik
pomiaru.
7. Dokonać pomiaru rezystancji metodą techniczną obiektu wskazanego przez
prowadzącego ćwiczenie. Pomiar wykonać w układzie a) poprawnie mierzonego
napięcia, b) poprawnie mierzonego prądu. Obliczyć wartość poprawną rezystancji,
bezwzględny błąd systematyczny, poprawkę oraz względny błąd systematyczny.
Sporządzić budŜet niepewności i prawidłowo zapisać końcowy wynik pomiaru.
8. Wyznaczyć charakterystykę napięciowo-prądową Ŝarówki zasilanej napięciem
przemiennym uzyskiwanym z autotransformatora. Wynik pomiaru przedstawić w
postaci wykresu.
9. Za pomocą cyfrowego woltomierza napięcia przemiennego o rozdzielczości minimum
5 cyfr znaczących wyznaczyć błąd nastawy napięcia przemiennego i stałego
programowanego generatora funkcyjnego. Pomiar błędu nastawy napięcia
17
przemiennego wykonać dla kilku wartości częstotliwości z przedziału od 40 Hz do
100 kHz. Wynik pomiaru błędu nastawy przedstawić w postaci wykresu.
Uwaga: obliczenia błędów i niepewności powinny być wykonywane w trakcie
przeprowadzania ćwiczenia. Zalecane jest przyniesienie na zajęcia kalkulatorów inŜynierskich
realizujących proste obliczenia statystyczne.
4. PYTANIA KONTROLNE
1. Podać definicję błędu bezwzględnego, poprawki oraz błędu względnego.
2. Opisać rodzaje błędów i ogólne sposoby ich wyznaczania.
3. Wymienić typy niepewności i scharakteryzować je.
4. Opisać metody wyznaczania standardowej niepewności typu A.
5. Opisać metody wyznaczania standardowej niepewności typu B.
6. Opisać metodę wyznaczania niepewności złoŜonej.
7. Opisać sposób sporządzania budŜetu niepewności.
5. LITERATURA
[1] „WyraŜanie niepewności pomiaru“. Przewodnik. Główny Urząd Miar, Warszawa 1999
[2] Turzeniecka D., „Ocena niepewności wyniku pomiaru”, Wydawnictwo Politechniki
Poznańskiej, Poznań 1997
[3] Skubis T., „Podstawy metrologicznej interpretacji wyników pomiaru”, Wydawnictwo
Politechniki Śląskiej, Gliwice 2004
Opracował: dr inŜ. Marian Kampik
v.1 / 14 XI 2008