Instrukcja obsługi
Robota IRP 6
Warszawa 2008
1
1. Informacje ogólne…………………………………………………………………………. 3
2. Specyfikacja techniczna…………………………………………………………………. 4
3. Zasady bezpieczeństwa BHP………………………………………………………….. 5
4. Uruchamianie ……………………………………………………………………………….. 6
5. Wyłączanie …………………………………………………………………………………… 7
6. Sterowanie……………………………………………………………………………………. 8
7. Programowanie……………………………………………………………………………… 9
ϱ
2
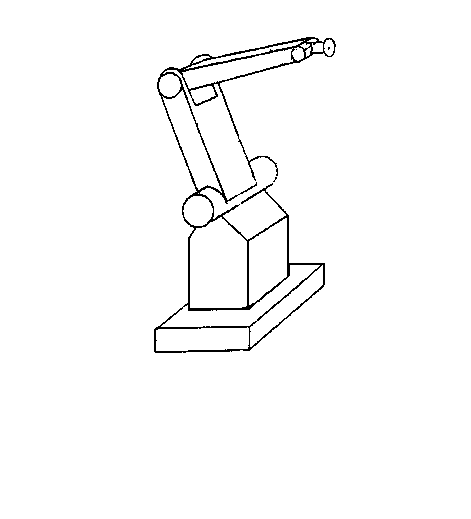
Robot IRP 6 jest robotem przemysłowym konstrukcji szwedzkiej. W
zależności od użytej końcówki robot może pracować jako różne narzędzia
np.
frezarka,
szlifierka,
spawarka
itp.
Można
zaprogramować
automatyczne potarzanie danej czynności.
System sterowania robota jest oparty na technice komputerowej co
umożliwia robotowi wykonanie skomplikowanych funkcji, jak: układanie
lub pobieranie przedmiotów według wzoru, realizację bardzo długich
programów, ruch prostoliniowy - pionowy lub poziomy, poszukiwanie
przedmiotów o nieznanym z góry położeniu. Możliwe jest również
dokonywanie poprawek w programach.
Robot składa się z części manipulacyjnej i oddzielonej konstrukcyjnie
szafy sterowniczej. W szafie sterowniczej są umieszczone moduły układu
sterowania łącznie ze sterownikami mocy silników, dzięki czemu część
manipulacyjna jest nieduża i lekka, szafa sterownicza z elektronicznymi
elementami układu sterowania może być umieszczona oddzielnie z dala
od części manipulacyjnej, co stos ˚
uje się w przypadku pracy robota w
szczególnie ciężkich warunkach otoczenia.
3
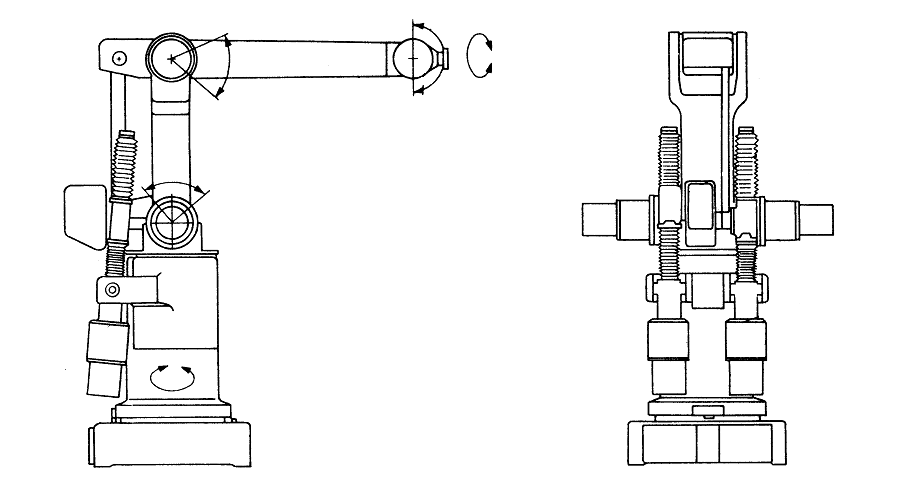
2. Specyfikacja techniczna
4
3
5
2
1
1. Ruch obrotowy:
- zakres obrotu 340o
- max. prędkość 95o/s
2. Ruch ramienia dolnego:
- zakres ruchu wokół pozycji pionowej
±40O
- max. prędkość 90o/s
3. Ruch ramienia górnego:
- zakres ruchu wokół pozycji poziomej +25o, -40o
4. Ruch przegubu (skręcanie):
- zakres ruchu ±180o
- max. prędkość 195o/s
5. Ruch przegubu (pochylenie):
- zakres ruchu ±90o
- max. prędkość 115o/s
4
• Należy pamiętać, że robot jest tylko maszyna i nigdy nie można być
pewnym jego posunięć, wprawdzie możemy nad nim panować, ale
są tryby w których urządzenie może stanowić szczególne
niebezpieczeństwo dla osób przebywających w jego pobliżu. Na
ogół dostęp do przestrzeni roboczej jest ograniczony barierą,
klatką, tak aby nie dało wejść się w obszar jego zasięgu, jednak
w naszym przypadku nie ma takich ograniczeń, gdyż do celów
dydaktycznych konieczny jest dostęp do samego robota.
• Należy więc pamiętać o następujących środkach ostrożności:
• Nie wolno przebywać w zasięgu urządzenia w momencie gdy na
silnikach podane są napięcia.
• Ubranie operatora jak tez osób przebywających w laboratorium
powinno być pozapinane tak, by nie było żadnych wolno wiszących
połaci materiału które mogą zaczepić się o elementy robota,
w przypadku posiadania krawatu, należy go zdjąć, lub schować pod
koszule.
• Nie wkładać rąk pomiędzy elementy ruchome robota.
• Zakładamy, że robot może poruszyć się w dowolnym kierunku
؎
z dowolna prędkością.
• Uruchomić robota możemy jedynie w obecności prowadzącego i za
wyraźną jego zgodą.
• Nie wolno włączać napięcia przy otwartej szafie sterowania
• Należy pamiętać, że programując ruch trajektoria tego ruchu nie
może przebiegać przez obiekty materialne, w związku z czym
proponuje się np. schować końcówkę jak najbliżej osi pionowej
robota i dopiero obracać go.
• Przed uruchomieniem robota należy sprawdzić czy na elementach
urządzenia nie ma żadnych wycieków czy tez pęknięć, zaleca się tez
manualne poruszanie nim w celu sprawdzenia działania wszystkich
przekładni.
5




4. Uruchamianie
W celu uruchomienia urządzenia należy:
1. Włączyć zasilanie szafy sterującej (włączenie bezpiecznika i
sprawdzenia podłączenia gniazda zasilania na ścianie).
2. Wcisnąć i przekręcić zgodnie z ruchem wskazówek zegara kluczyk na
szafie sterującej.
3. Nacisnąć przycisk
w celu podania napięcia na komputer sterujący.
4. Sprawdzić, czy nie pulsują przyciski sygnalizujące błędy ( czerwony
przycisk pod kluczykiem oraz przycisk
), jeśli pulsują oznacza to że
sterowanie napotkało jakiś błąd, aby go usunąć należy nacisną
pulsujący przycisk, powinien zgasnąć.
5. Podanie napięcia na silniki realizowane jest przyciskiem
, ale można
go wcisnąć tylko wówczas, gdy nieaktywne są przyciski błędów. Po
podaniu napięcia na silniki możemy już manualnie przy pomocy
joysticka manipulować robotem.
6. Robot jest aktywny, to znaczy ma podane napięcia na silniki i
komputer sterujący. Maszyna nie wie jednak w jakim jest położeniu,
w celu synchronizacji i zerowania należy nacisnąć pulsujący przycisk
뗠
( należy pamiętać aby przed zerowaniem pozycji ustawić robota w
odpowiedniej konfiguracji, tzn. na poszczególnych elementach
ruchomych względem siebie maszyny są widoczne kreski oraz
oznaczenia kierunku ruchu przy zerowaniu, należy tak ustawić robota
aby poruszając się natrafił linią na linię, w przeciwnym wypadku
zadziałają wyłączniki krańcowa i urządzenia zgłosi błąd).
7. Po chwili robot ustawi się w pozycji wyjściowej, w tym momencie nie
mamy już możliwości poruszania nim ręką, każda taka próba kończy
się tym, ze sam powraca do pozycji zerowej.
Tak uruchomiony robot jest gotowy wprowadzania programu, który
będzie sterował jego ruchami.
6
W celu wyłączenia robota należy:
1. Przekręcić kluczyk w lewo o 90O
2. Wyłączyć zasilanie w szafie bezpieczników(bezpiecznik ostatni na dole
po prawej stronie w szafce przy drzwiach wejściowych)
W każdej chwili istnieje możliwość awaryjnego wyłączenia urządzenia
czerwonymi przyciskami w kształcie grzybków, z których jeden jest z boku
pulpitu sterującego a drugi na szafie, czerwony przycisk usytuowany
najniżej ze wszystkich. Należy użyć ich w przypadku zauważenia
jakiegokolwiek niebezpieczeństwa w czasie wykonywania ćwiczenia.
埰؋
7
Robotem można sterować na dwa sposoby:
• za pomocą joysticka, który znajduje się na pulpicie sterowniczym,
• programując robota to wykonywania powtarzalnych serii zadań.
Do sterowania wykorzystywany jest joystick znajdujący się na
pulpicie sterującym. Jest to joystick o 3 stopniach swobody. Może
poruszać się w górę i w dół, w prawo i lewo, oraz obracać wokół osi
pionowej. Obok joysticka znajduje się przełącznik 1-2 który przełącza nas
pomiędzy manipulowaniem kolejnymi stopniami swobody. W ustawieniu
1 mamy dostęp do 3 pierwszych wcześniej omówionych stopni swobody,
po przełączeniu przełącznika na pozycję 2 mamy możliwość
manipulowania 4 i 5 stopniem, czyli praktycznie rzecz biorąc końcówką,
obrót
joysticka
wówczas
nie
jest
wykorzystywany.
Pamiętać należy, że aby joystick działał należy nacisnąć czarną
płytkę znajdującą się pod nim. Pod płytką zamontowany jest przełącznik
który zabezpiecza stanowisko przed przypadkowymi ruchami joysticka
np. w przypadku gdyby pulpit sterowniczy spadł na ziemie, czy tez coś
naciskało na joystick powodując jego wychylenie czy tez obrót.
8


7. Programowanie
Jak wcześniej czytaliśmy programowanie jest możliwe dopiero po
synchronizacji robota. Jeśli czynność ta została przeprowadzona i
zakończyła się powodzeniem, czyli nie pulsują ani lampki zgłaszające
błędy, na wyświetlaczu pulpitu nie ma napisu „Błąd”, ani nie pulsuje
przycisk synchronizacji, możemy zacząć programowanie ruchów robota.
W celu wejścia w tryb programowania wciskamy przycisk
na
pulpicie sterowania, teraz możemy przystąpić do wprowadzania
pierwszych wartości.
1. Należy podać wartości obowiązkowe
1. Narzędzie -> wybieramy pierwsze narzędzie gdyż w naszym
przypadku narzędziem jest jedynie śruba wkręcona
w obrotową główkę, aby potwierdzić wybór naciskamy
przycisk opisany „TAK”
2. Prędkość -> domyślnie jest ustawiona wartość 500
i taka
௦
pozostawiamy przy wstępnym programowaniu, później
wartość prędkości 埰؋
można zmienić z klawiatury podajać jej
przyrost procentowo. Naciskamy „TAK”
3. Prędkość maksymalna, awaryjna -> domyślnie 1000
i tak
௦
pozostawiamy, naciskamy „TAK”
4. Teraz należy ustawić 4 i 5 stopień swobody mniej więcej
w ustawieniu w jakim ma on dojechać do obiektu
manipulowania, gdyż zaoszczędzi to czasu. Ustawienie to
robi się w tej pozycji, ponieważ po przejściu do następnego
kroku orientacja robota jest uznawana za wyjściową.
5. Naciskamy teraz przycisk
w celu wybrania rodzaju ruchu.
Wybieramy 3 możliwość, czyli quasiliniowość. Powoduje ona
iż z jednolita prędkością każdego ze stopni swobody robot
osiągnie stan ustalony.
6. Należy teraz podać parametry związane z przemieszczeniem,
mianowicie możemy podać je w postaci prędkości lub podać
drogę i czas, wybieramy opcję podania prędkości
i wybieramy standardowo prędkość 500
.
௦
9

7. Jesteśmy teraz pytani czy robot ma poruszać się z prędkością
zgrubną czy dokładną. Jeśli robot ma tylko dojechać do
obiektu a nie podnosić go można wybrać opcję dokładności
zgrubnej, w przeciwnym wypadku wybieramy dokładny ruch
robota.
8. Kolejnym
punktem
jest
wybór
sposobu
podania
współrzędnych końca, mogą one być podane we
współrzędnych względnych lub bezwzględnych.
W tym momencie następuje koniec podawania informacji
potrzebnych do programowania jesteśmy pytani, czy akceptujemy
nasze wybory, jednak przed naciśnięciem akceptuj należy wykonać
ruch jaki później ma wykonywać zadany program, gdyż akceptacja
kończy programowanie wiersza.
Teraz zostajemy przeniesieni do nowego wiersza i możemy robić
nowy ruch i powielić wszystkie informacje z wiersza poprzedniego,
albo wprowadzać nowe wartości zgodnie z wyżej przedstawiona
procedurą.
Ӡؐ
W ostatnim ruchu programu zaleca się wrócić końcówką około
pozycji początkowej, co zapobiegnie gwałtownym i do końca nie
przewidzianym ruchom robota.
W celu uruchomienia naszego programu naciskamy przycisk
Pod przyciskiem „1” mamy możliwość zmiany prędkości, zgodnie z
2 punktem opisanym wyżej.
10
眐؋
11
12