Wstęp
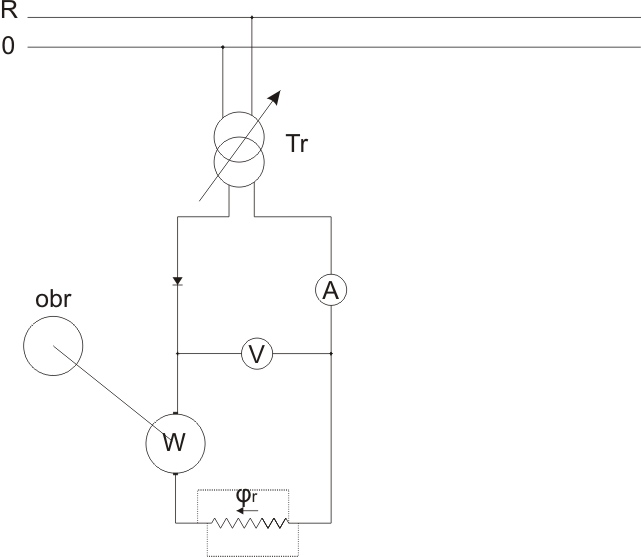
Hamowanie elektrodynamiczne stosuję się do zmniejszania prędkości obrotowej silnika. W obwód silnika, po odłączeniu zasilania, wpina się opornik. Silnik zaczyna pracować jako prądnica, a energia mechaniczna dostarczana do wirnika jest zamieniana na ciepło w dołączonym oporniku. W takiej sytuacji prąd w uzwojeniach zaczyna płynąć w przeciwną stronę, zmienia się kierunek strumienia magnetycznego i powstaje połączenie samobójcze. Układy, w których stosuję się hamowanie elektrodynamiczne konstruuję się tak, aby kierunek przepływu prądu nie zmieniał się. Stosując hamowanie dynamiczne nie da się doprowadzić do całkowitego zatrzymania silnika, ponieważ wraz ze spadkiem obrotów maleje moment hamujący.
Wyniki i analiza pomiarów
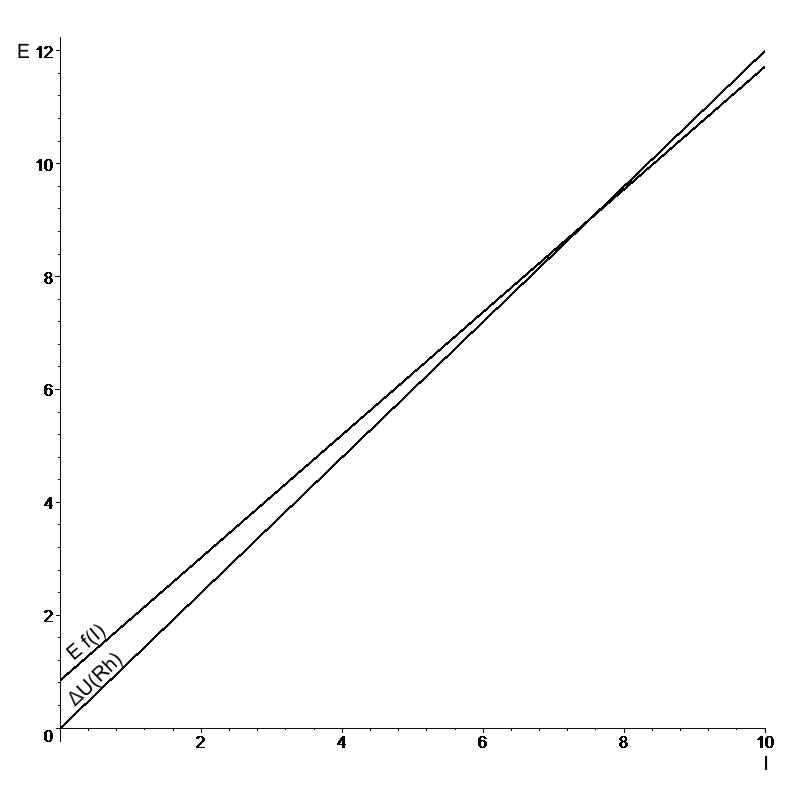
Rh = R0
n = 185 obr/min
E |
0.85 |
9 |
I |
0 |
7,5 |
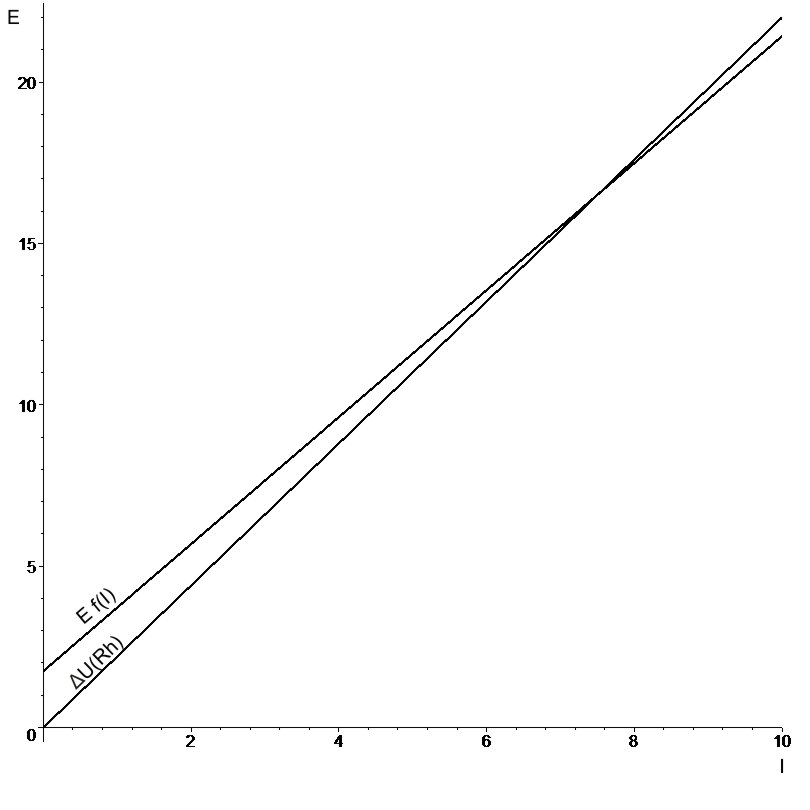
Rh = R1
n = 400 obr/min
E |
1,75 |
26,5 |
I |
0 |
7,5 |
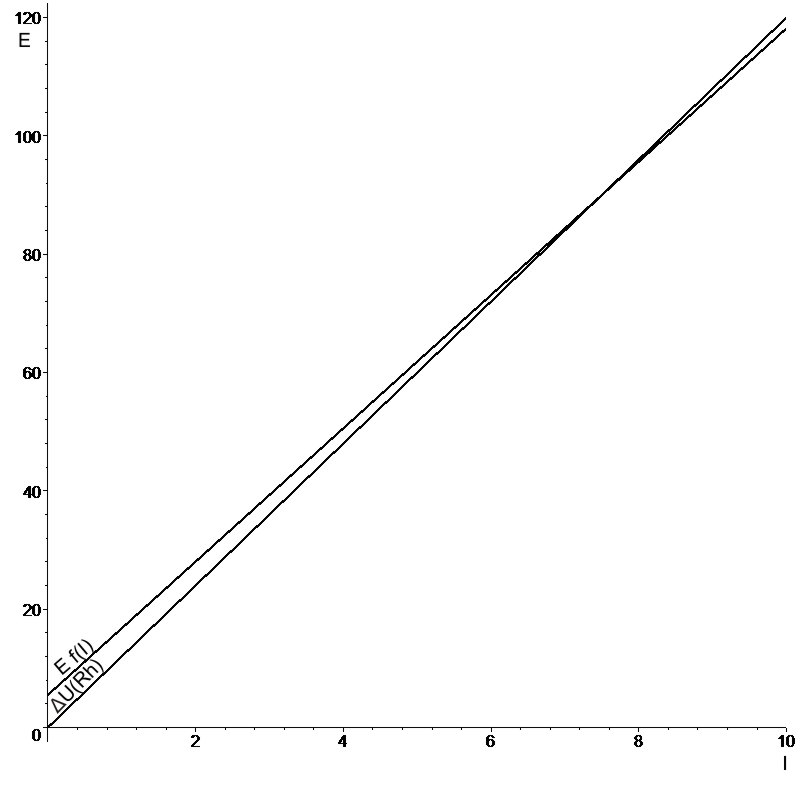
Rh = R4
n = 1180 obr/min
E |
5,5 |
90 |
I |
0 |
7,5 |
Charakterystyki siły elektromotorycznej otrzymaliśmy jako linie proste. Na laboratoriach nie dysponowaliśmy odpowiednim rezystorem, dzięki któremu moglibyśmy zanotować więcej punktów charakterystyki i na podstawie tego wykreślić prawidłowy przebieg funkcji.
Analiza błędów pomiarowych:
klasa obrotomierza: 2
dokładność obrotomierza dla zakresu 120 - 480: 0.02 · 360 = 7.2 obr/min
dokładność obrotomierza dla zakresu 400 - 1600: 0.02 · 1200 = 24 obr/min
klasa woltomierza: 0.5
zakres woltomierza: 0 - 75V
dokładność pomiaru woltomierza: 0.005V · 75 = 0.375V
klasa amperomierza: 1
zakres amperomierza: 0 - 23.1A
dokładność pomiaru amperomierza: 0.01 · 23.1A= 0.231A
Wyszukiwarka
Podobne podstrony:
Hamowanie Elektryczne w poj trakcyjnych
dudziński,układy napędowe,Hamowanie elektryczne silników indukcyjnych
cw 5 spr moje, Elektrotechnika AGH, Semestr II letni 2012-2013, Fizyka II - Laboratorium, laborki, l
.elek.+spr.3+zad1, Elektra
ćwicz3 spr, Podstawy elektrotechniki, laborki
spr dyfrakcja elektronów poprawione, STUDIA PŁ, TECHNOLOGIA ŻYWNOŚCI I ŻYWIENIA CZŁOWIEKA, ROK I, SE
Spr. z analogow, Elektronika i telekomunikacja-studia, rok II, semIII, ua1
Wyznaczanie spr. grzejnika elektr, Weterynaria Lublin, Biofizyka , fizyka - od Bejcy, Elektryczność
fpow spr-mikroskop elektronowy, studia, nano, 3rok, 5sem, fizykochemia powierzchni, lab
dudziński,układy napędowe,Metody i układy hamowania elektrycznego silnika obcowzbudnego prądu stałeg
spr 10 elektronika II, Dokumenty Inżynierskie, Elektronika 2 laboratorium, aelektonika 2 lab, Elektr
spr dyfrakcja elektron�w poprawione
Hamowanie Elektryczne w poj trakcyjnych
DŁAWIK Z LITYM RDZENIEM FERROMAGNETYCZNYM O ROZRUCHU I HAMOWANIA ELEKTRYCZNEGO SILNIKÓW INDUKCYJNYCH
Wnioski do spr z elektry 3, PW SiMR, Inżynierskie, Semestr V, syf, laborki, Lab. Ukł. Napędowych
Elektrotechnika G1 spr
więcej podobnych podstron