Narysować schemat blokowy układu opisanego równaniem stanu i równaniem wyjścia i uzasadnić wymiary macierzy A, B i C.
Ad1
Narysować schemat blokowy układu opisanego równaniem stanu i równaniem wyjścia i uzasadnić wymiary macierzy A, B i C.
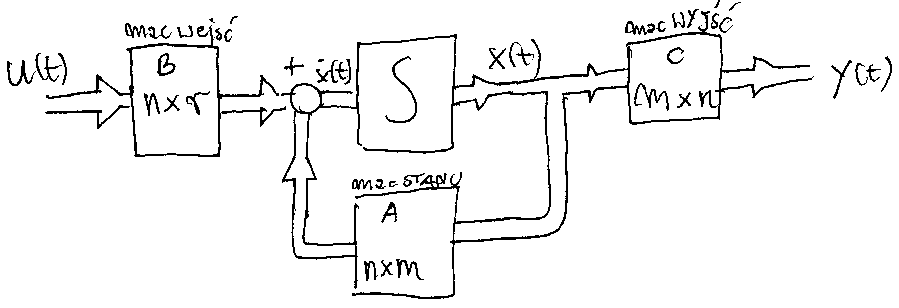
Rys. schemat blokowy układu dynamicznego opisanego równaniem stanu i równaniem wyjścia.
Przedstawiony model ukł. dynamicznego można traktować jako podstawowy schemat opisany równ. stanu i równ. wyjścia. Schemat ten ulega modyfikacją zależnie od równań stanu i wyjścia. Równania stanu i wyjścia zależą od własności danego układu.
Przypadek jednowymiarowego układu sterowania gdy wektor u(t) i y(t) są reprezentowane przez odpowiednie pojedyńcze składowe u(t) i y(t).
dla U(t)= u(t) mac. B staje się macierzą kolumnową b o wymiarach nx1.
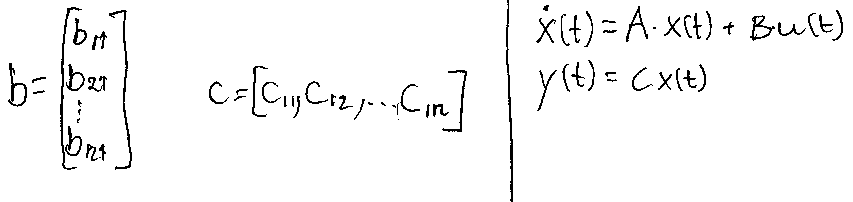
Dla Y(t)=y(t) mac. C staje się macierzą wierszowa c o wymiarach 1xn.
Przypadek ukł. dynamicznego gdy sygnały sterujące oddziaływuja także na sygnały wyjściowe u(t)→y(t). W tym przypadku równanie wyjścia Y(t)=Y[x(t),u(t)] zostaje rozbudowane o macierz D.
Ad2
Jakie własności można określić przy pomocy charakterystyki skokowej.
Można określić własności dynamiczne układu. Poprzez badanie układu nadając mu wymuszenie skokowe tzw. Skok jednostkowy 1(t) lub jego pochodna wzg. czasu zwaną impulsem Diraca S(t).
Odpowiedz układu na wymuszenie nosi nazwę charakterystyki skokowej L/1(t)=1/s. Na podstawie transmitancji operatorowej układ ma charakterystykę skokową h(t).
Ad3
Podać zasady stosowane przy doborze zmiennych fazowych.
Zmienne fazowe - dobór zm. fazowych następuje przy założeniach dotyczących układu dynamicznego. Układ dynamiczny jest: liniowy, ciągły, stacjonarny, jednowymiarowy. Dla takiego układu zm. fazowe wyznacza się wybierając: pierwszą zm. stanu jako jeden z sygnałów, kolejne zm. stanu jako kolejne pochodne tego sygnału.