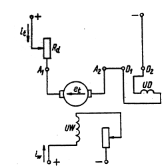
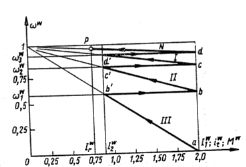
ROZRUCH REZYSTOROWY SILNIKA OBCOWZBUNEGO PRADU STAŁEGO: Uzwojenie wzbudzenia jest zasilane początkowo napięciem całkowitym, natomiast twornik - dla uniknięcia nadmiernego prądu rozruchowego - jest zasilany pośrednio przez oporniki rozruchowe W rozważaniach pomija się oddziaływanie i indukcyjność twornika; prąd It jest przy stałym strumieniu magnetycznym proporcjonalny do momentu obrotowego. W okresie rozruchu prąd płynący przez obwód. twornika waha się, w granicach założonych odpowiednio do warunków rozruchu, między prądem maksymalnym a prądem przełączenia . W chwili włączenia silnika do sieci w obwód twornika jest włączana maksymalna rezystancja Rm=Ra+r1+r2+...+rm (rys. 2.15). Jeśli pominąć indukcyjność obwodu twornika, to it = (UN-et)/Rt. Przy m sekcjach rozrusznika I1 = UN / Rm . W miarę zwiększania prędkości i napięcia wewnętrznego silnika, prąd rozruchowy będzie się zmniejszał zgodnie z przebiegiem charakterystyki rozruchowej III. W chwili osiągnięcia przez prąd wartości max następuje wyłączenie sekcji rozrusznika i ponowne zwiększanie prądu do wartości przelaczenia pradu W ten sposób rozruch jest kontynuowany aż do przejścia na charakterystykę naturalną N i ustalenia się prądu i prędkości odpowiednio do obciążenia. Po zakończeniu rozruchu przy ewentualnych zmianach obciążenia prąd silnika i jego prędkość kątowa będą zmieniały się zgodnie z przebiegiem charakterystyki naturalnej. Wszystkie charakterystyki rozruchowe tworzą Pęk liniowych charakterystyk mechanicznych. Każdą charakterystykę wykreśla się prowadząc ją przez dwa punkty: wspólny dla wszystkich charakterystyk punkt ω= 1 na osi prędkości i odpowiedni punkt na prostej ad Wartości rezystancji poszczególnych sekcji rozrusznika muszą być, oczywiście, tak dobrane, aby granice zmian prądu rozruchowego odpowiadały założonym I1 i I2. Stosując rozrusznik ręczny nie można uniknąć pewnych rozbieżności między wartościami prądu przewidywanymi w obliczeniach a wartością prądu płynącego rzeczywiście podczas rozruchu. Wartość prądu maksymalnego /1 jest ograniczona warunkami komutacji. Nie powinna ona, zależnie od mocy silników, przekraczać następujących wartości:
PN <10 kW, I1<3IN; PN < 150 kW, I1 < 2,5IN
PN > 150 kW, I1 < 2IN;
W silnikach prądu stałego do pracy przerywanej, stosowanych powszechnie w napędach transportowych i hutniczych, przyjmuje się znacznie większe wartości I1 .
Prąd przełączenia powinien spełniać warunek
I2 > (1,1÷1,2)Ir
przy czym Ir. określa prąd, jaki odpowiada momentowi oporowemu maszyny roboczej w czasie rozruchu. Różnica prądów I1-I2 jest miarą momentu dynamicznego i decyduje o przyspieszeniu w czasie rozruchu.
21. Rozruch silników indukcyjnych klatkowych z zastosowaniem tyrystorowego sterownika napięcia.
Rozruch silników indukcyjnych klatkowych z zastosowaniem tyrystorowego sterownika napięcia dotyczy silników niskiego napięcia, małej i średniej mocy. Włączenie w obwód uzwojenia stojana symetrycznych układów tyrystorowych prowadzi do obniżenia napięcia na jego zaciskach. Podstawowym wyposażeniem tych układów jest zespół przeciwsobnie równoległych tyrystorów w każdej fazie zasilania jak pokazano na rysunku 7.5 (układ z sześcioma tyrystorami).Przystosowanie sterownika napięcia do wykorzystania w warunkach rozruchu silnika polega na uzależnieniu sterowania zespołu tyrystorów od czasu. Przez regulację wartości początkowej napięcia oraz czasu narastania napięcia od wartości początkowej do znamionowej, możliwe jest optymalizowanie rozruchu ze względu na wartość początkową prądu i momentu silnika oraz przyspieszenia układu napędowego. Po dokonaniu rozruchu stosuje się zwieranie (bocznikowanie) sterownika napięcia dodatkowym łącznikiem (stycznikiem) w celu odciążenia zespołu tyrystorów podczas pracy silnika. Sterowniki napięcia przystosowane do rozruchu silników noszą nazwę układów do łagodnego rozruchu silników indukcyjnych (tzw. soft-start). Umożliwiają programowanie procesu rozruchu. Ich wadą jest generowanie wyższych harmonicznych w przebiegu napięcia i prądu silnika. 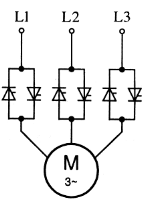
A2Dane:Pn=30,Un=400,Itn=60,f=50,nn=1420,pm=Mk/mn=2,8
a)m.znamionowy=Mn=Pn/wn=30000/148,7 wn=pi/30*nn ns=Itn*f/Pb znamionowy poslizg Sn=(ns-nn)/ns
b)Me/Mk=2/s/sk+sk/s Me=2Mk/s/sk+sk/s poslizg krytyczny sk=(Pm+pierwiastek (Pm^2-1)
A2Dane:Pn=21 Un=220 Itn=100 nn=2350 Rt=0.2
a)m.znamionowy Mn=Pn/wn znamionowa predksoc katowa wn=2pin/60 sprawnosc znamionowa Nn=Pn/P1n P1n=Un*Itn
b)
w=Um/ke*fiw-Rt*It/ke*fiw Utn-En-Urt=0 En=Utn-Urt=Utn-RtItn
w=0 Ut-RtIt2=0 It2=Ut/Rt En=ke*fiw*wn kefiwn=En/wn w0=Utn/kefiw Me=kefiwIt Mez=krfiwItz Men=Pen/wn=En*Itn/wn w0=Ut/kefiw
c)w=Ut/kefiw-RtIr/kefiw Iz=Ir=Ut/Rt
Ir=2.5Itn=Ut/Rd+Rt wyznaczyc Rd
B2Dane:Pn=10,Un=380,Itn=20,nn=1450 pm=Mk/Mn=3.0 s=1
a)m.znamionowy silnika Mn=Pn/wn wn=2pinn/60
b)Me/Mk=2/s/sk+sk/s Mk=3,0*Mn sk=pm(pm-pierwiastek pm^2-1
C2Fdane Pn=30 Un=220 Itn=155 nn=1250 Rt=0.12
a)m.znamionowy Mn=Pn/wn wn=(pi*nn)/30 predkosc idealnego biegu jalowego w0=Ut/kefiw Utn-E-Urt=0 E=Utn-Urt E=kefiw*wn kefiwn=E/wn
d)Mm=0,5Mn
Mm=Me=kefiwIt It=Mm/kefiw E=kefiw*wn Ut-E-(Rd+Rt)It wyznaczyc Rd
Dane:Pn=15 Un=100 In=39 f=50 nn=1410 pm=Mk/Mm
a)predksoc synchroniczna ns=60*f/Pb Pb liczba par biegunow poslizg znamionowy s=ns-nn/ns znamionowy moment Mn=Pn/wn predksoc znamionowa wn=pi*nn/30
b)Me/Mk=2/s/sk+sk/s Mk=Mn*pm moment rozruchowy Me(s=1)=Mr sk=sn(pm+pierwiastek pm^2-1
c)s0,9=ns-0,9nn/ns ns=1500? Me0,9=2Mk/s0,9/sk+sk/s0,9
A1Ekz=0,5Izw1^2 Ek=0,5Is*w^2+0,5Im*w^2 0,5Izw^2=0,5Isw1^2+0,5Imw^2 /*2/w1^2 Iz=Is+Im(wn/w1)^2
Układ napędowy, którego prędkość zmienia się ,jest w stanie dynamicznym inaczej nazywamy stanem przejściowym lub nieustalonym , w którym
W stanach nieustalonych (rozruch, hamowanie) układ napędowy można przedstawić w postaci trzech podstawowych elementów.
W przypadku ruchu obrotowego są to:
silniki napędowe (SM)
maszyna robocza (MR) wraz z urządzeniem pędnym
zastępcza masa zamachowa o momencie bezwładności J równym momentowi bezwładności całego układu.
Elementem układu odpowiadają momentom obrotowe które spełniają równanie ruchu.
M-Mm-Md=0
Gdzie: M- moment obrotowy silnika
Mm - moment oporowy
Md - moment dynamiczny
Stan pracy układu napędowego w stanie nieustalonym charakteryzuj związki
Jeśli M>Mm masy układu poruszają się ruchu przyspieszonym (
Gdy M<Mm ruchem opóźnionym.
Czas trwania rozruchu lub hamowaniu możmy wyznaczyć przekształcając równanie
M=Mm+ J dw/dt
Do postaci dt= J dw/ M- Mm
Stąd czas potrzebny do zmiany prędkości kątowej od w1do w2
Zaś czas hamowania od wu do 0
7. Silnik obco wzbudny prądu stałego ma dwa niezależne obwody elektryczne zasilane z oddzielonych źródeł napięcia stałego: obwód twornika i obwód wzbudzenia.
W stanach statycznych silnika obcowzbudny prądu stałego jest opisany przez układ równań algebraicznych
równanie napięciowe obwodu twornika Ut= (Rt+Rd) It+ Es
zależnośc na siłę elektromotoryczną twornika Es Es= ke
równanie na moment elektromagnetyczny silnika Me Me=
Znaczenie oznacznia:
Ut - napięcie zanikania obwodu twornika
Jt - prąd twornika
Rt - rezystancja twornika
Rd - rezystancja dodatkowa w obwodzie twornika
w - strumień wzbudzenia silnika
k - stała konstrukcyjna silnika
w - prędkość kątowa
Korzystając z dwóch pierwszych równań otrzymamy ogólnie równanie charakterystyki elektromechanicznej silnika obcowzbudnego prądu stałego
Ogólne równanie charakterystyki mechanicznej silnika obcowzbudnego prądu stałego
Kt- współczynnik nachylenia charakterystyki elektromechanicznej silnika
Km - ----------------------------------------------- mechanicznej silnika
w0 - prędkość kątowa idealnego biegu jałowego silnika
Wyszukiwarka