Kinematyka odwrotna
Dane na symbolach ogólnych:
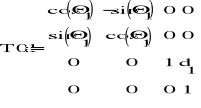
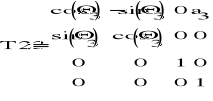
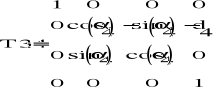
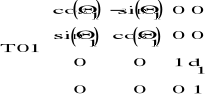
Macierze przekształceń z notacji D-H:
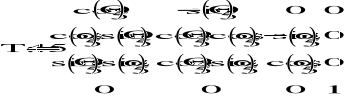
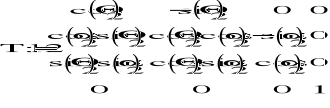
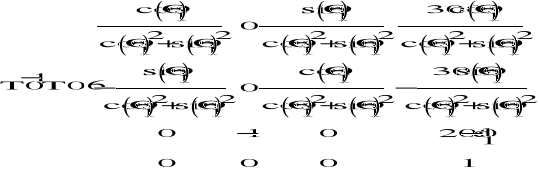
Do kinematyki odwrotnej potrzebna jest również macierz T16:

![]()

Obliczenia na wartościach liczbowych
Równanie kinematyki odwrotnej:
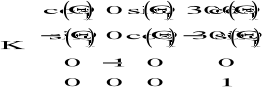
T01-1 * T06 = T16
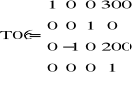
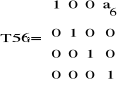
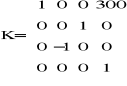
Po podstawieniu znanych wartości d1=200 i uproszczeniach, macierz K przyjmuje następującą postać:
Obliczenia Θ1:
Porównanie współczynników z pozycji [2,3] macierzy K i macierzy T16
![]()
![]()
![]()
czyli arccos(1)= Θ1
Otrzymujemy nieskończoną liczbę rozwiązań spowodowaną okresowością funkcji:
![]()
![]()
gdzie:
Po podstawieniu tych wartości do macierzy K otrzymujemy nową macierz.
Obliczenia Θ2 i Θ5:
porównanie współczynników z pozycji [1,4] macierzy K i macierzy T16
![]()
![]()
czyli:
![]()
porównanie współczynników z pozycji [2,4] macierzy K i macierzy T16
![]()
![]()
równanie sprowadza się do postaci :
0 = 0
porównanie współczynników z pozycji [3,4] macierzy K i macierzy T16
![]()
![]()
czyli:
![]()
Uzyskujemy układ równań
![]()
![]()
Po podstawieniu znanych wartości a3 = 150, a6 = 50, d4 = 100 przyjmuje taką postać:
![]()
![]()
Otrzymujemy nieskończony zbiór rozwiązań, spowodowany okresowością funkcji.
![]()
![]()
![]()
gdzie:
Rozwiązaniami mieszczącymi się w przestrzeni roboczej manipulatora są:
![]()
![]()
![]()
![]()
![]()
![]()
K