UKŁAD ZASILANIA.
MODEL LINII NISKIEGO NAPIĘCIA.
Badanie linii zasilającej przeprowadza się na modelu. Układ bazowy modelu przedstawiony jest na rysunku. Rezystancja odbiornika ma wartość R = 3.3 [kΩ] . Pojemność kondensatora do poprawy cosϕ układu zasilania wynosi C = 2 [μF]. Cyframi arabskimi oznaczono punkty montażowe układu bazowego. Przez połączenie różnych punktów można uzyskać różne układy zasilania.
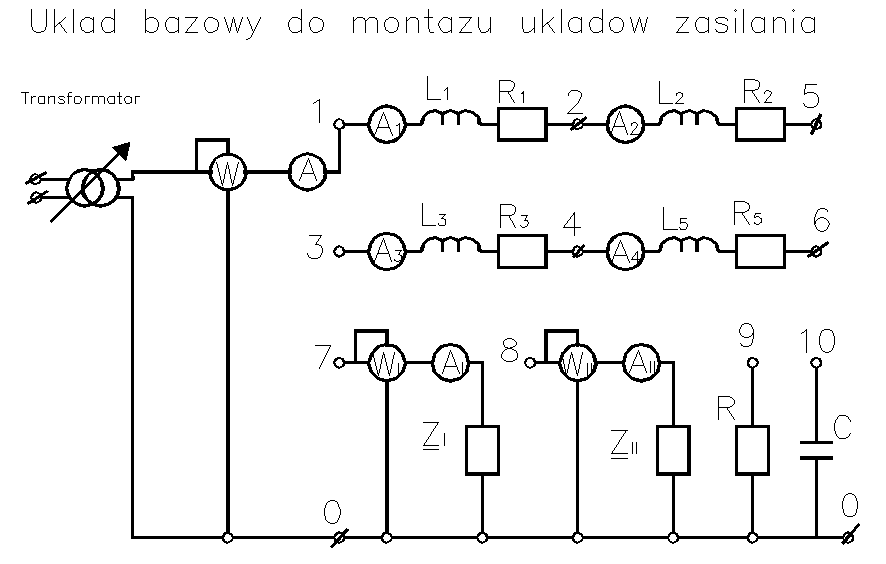
Rys. 1. Układ bazowy do montażu układów zasilania.
Jako układ do pomiarów przyjęliśmy układ zasilania połączony jak na dołączonym rysunku. (układ B).
W pierwszej części ćwiczenia należy dokonać pomiaru rezystancji linii zasilającej, do tego celu wykorzystujemy układ mostku Wheatson'a. Impedancja linii wynosi:
rezystor |
Z1 (1,2) |
Z2 (2,5) |
Z3 (3,4) |
Z4 (4,6) |
Ω |
220,8 |
260,9 |
218,2 |
214,3 |
Kolejnym etapem doświadczenia było mierzenie wielkości charakterystycznych linii przy ustalonym napięciu U = 239,5 [V].
Bez kondensatora:
|
P |
I |
I1 |
I2 |
I3 |
I4 |
PI |
II |
PII |
III |
Miernik |
W |
A |
A1 |
A2 |
A3 |
A4 |
WI |
AI |
WII |
AII |
Wartość |
31 |
0,2 |
0,19 |
0,08 |
0,05 |
0,06 |
4 |
0,075 |
5 |
0,07 |
U1 |
U2 |
U3 |
U4 |
U5 |
U6 |
U7 |
U8 |
U9 |
V |
V |
V |
V |
V |
V |
V |
V |
V |
239,5 |
162,5 |
152,4 |
162,7 |
127,4 |
133,2 |
127,6 |
133,1 |
152,2 |
Za wzorów liczymy: cos ϕ = P / U1I cosϕ1 = PI / U7 II cosϕII=PII / U8 III
PR = U92 / R Q = (U1 I)2 - P2 η = (PI + PII + PR) / P
cosϕ |
cosϕ I |
cosϕ II |
Q |
PR |
η |
0,65 |
0,41 |
0,54 |
36,5 |
8,53 |
0,57% |
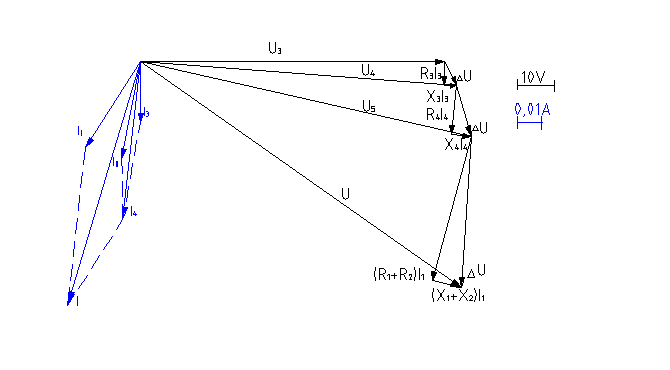
Wykres wskazowy prądów i napięć bez kondensatora.
Z kondensatorem:
|
P |
I |
I1 |
I2 |
I3 |
I4 |
PI |
II |
PII |
III |
Miernik |
W |
A |
A1 |
A2 |
A3 |
A4 |
WI |
AI |
WII |
AII |
Wartość |
37,5 |
0,175 |
0,17 |
0,095 |
0,055 |
0,1 |
6 |
0,085 |
6,5 |
0,085 |
U1 |
U2 |
U3 |
U4 |
U5 |
U6 |
U7 |
U8 |
U9 |
V |
V |
V |
V |
V |
V |
V |
V |
V |
240,3 |
201,5 |
187,5 |
201,4 |
153,1 |
159,6 |
153,2 |
160 |
188 |
cosϕ |
cosϕ I |
cosϕ II |
Q |
PR |
η |
Qc |
0,89 |
0,46 |
0,48 |
19,03 |
12,18 |
0,66 |
25,4 |
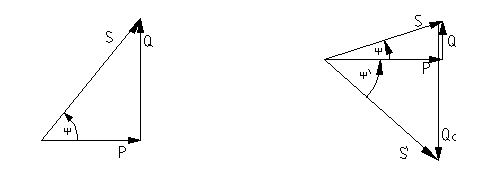
Rys 1. Wykres wskazowy mocy modelu lini bez kondensatora. Rys 2. Wykres wskazowy mocy modelu linii z kondensatorem.
UKŁADY STEROWANIA.
Elektryczny układ sterowania odbiornika energii elektrycznej składa się z dwóch odrębnych obwodów elektrycznych:
obwodu sterującego,
obwodu głównego.
Układ sterowania wykonany za pomocą łączników określa się jako przerwany. W układzie sterowania przerywanego stosowane są łączniki:
manewrowe,
sterownicze.
Pierwsze są przeznaczone do wykonywania łączeń w obwodach głównych, drugie - w obwodach sterowniczych. Wymagania stawiane łącznikom zależą od ich przeznaczenia:
przy pracy manewrowej, zasadniczą rolę odgrywają prądy rozruchowe zasilanych urządzeń i duża liczba łączeń - stąd wymagana zdolność gaszenia łuku łączeniowego,
przy pracy pomocniczej, zasadniczą rolę odgrywa wartość wielkości pobudzającej przełączenie układu styków i otrzymana zwłoka czasowa w przełączeniu obwodu sterującego.
Łączniki manewrowe występujące w ćwiczeniu to przede wszystkim styczniki. Łączniki sterujące występujące w ćwiczeniu to przede wszystkim: przyciski, przekaźniki pomocnicze pośredniczące, przekaźniki pomocnicze czasowa i wyłączniki drogowe.
Stycznik
jest łącznikiem przeznaczonym do wykonywania dużej liczby łączeń. Styki ruchome stycznika są utrzymywane w położeniu wymuszonym pod działaniem siły zewnętrznej. W przypadku styczników elektromagnetycznych siła ta jest wytwarzana przez elektromagnes. W ćwiczeniu zastosowano styczniki suche.
Przekaźniki
pomocnicze reagują na pojawienie lub zanik wielkości pobudzającej (prądu, napięcia). W porównaniu do styczników, charakteryzują się one:
znacznie mniejszym poborem mocy sygnału wejściowego,
mniejszą zwłoką czasową działania,
możliwością wykorzystania zestyków do łączenia małych prądów, tzn. wyłącznie w obwodach pomocniczych.
Przekaźniki pomocnicze zainstalowane na tablicy łączeniowej (ściana płaczu) ćwiczenia, dzielą się na: pośredniczące i czasowe. Przekaźniki pośredniczące powtarzają (powielają, transmitują) sygnał wejściowy. Ich zadanie to zmniejszenie poboru mocy sygnału wejściowego przy zwiększeniu szybkości działania. Przekaźnik czasowy jest przekaźnikiem zwłocznym o nastawionym czasie zadziałania (łączenie zestyków nastąpi ze zwłoką w stosunku do chwili pobudzenia).
Na ćwiczeniu wykonaliśmy schematy dwóch sterujących, a mianowicie:
układ sterujący samopodtrzymujący,
układ sterujący pracą silnika ze zwłoką czasową.
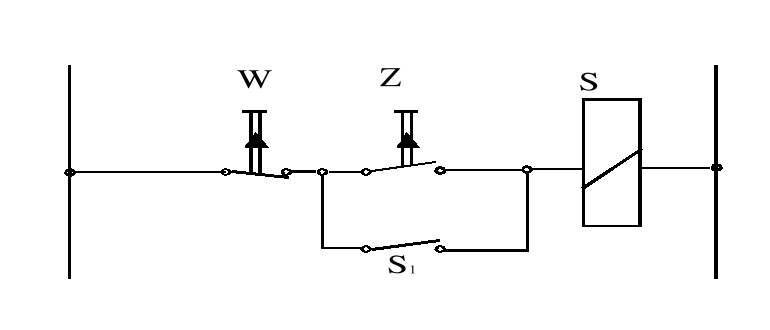
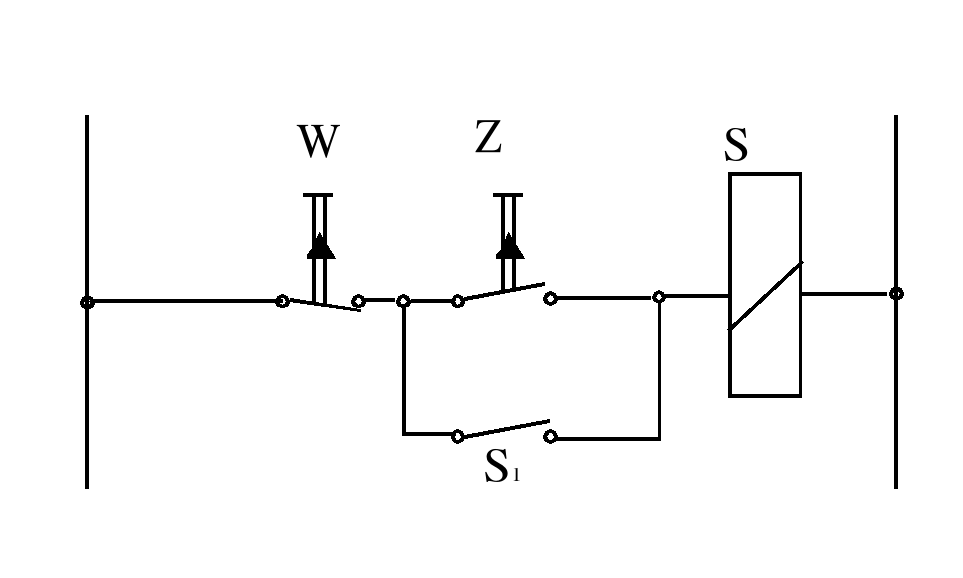
UKŁAD STERUJĄCY SAMOPODTRZYMANIA.
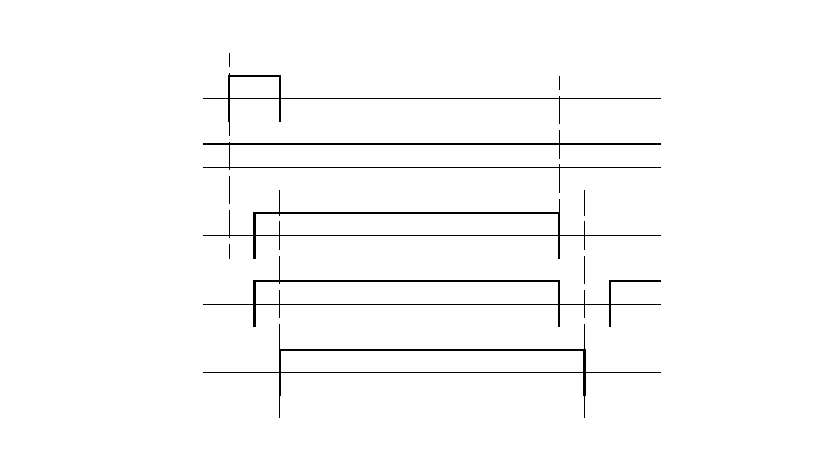
W układzie na poniższym rysunku po wciśnięciu przycisku sterowniczego (zestyku przycisku zwiernego) następuje załączenie cewki przekaźnika na czas wciśnięcia przycisku. Układ pozwala sterować danym urządzeniem tylko przez wciśnięcie, bądź wyciśnięcie przycisku z jednoczesnym przytrzymaniem go.
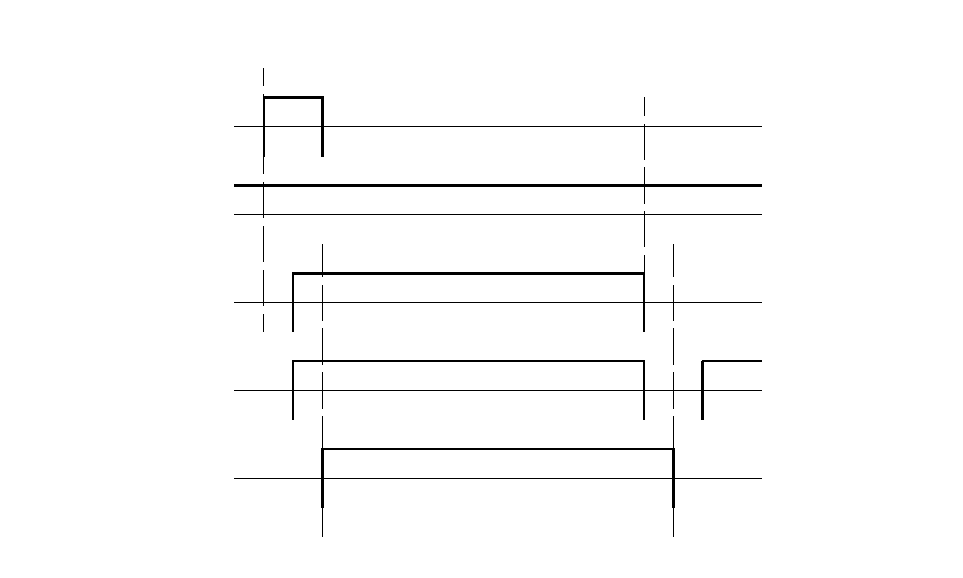
Wykres czasowy do ukł. znajdującego się powyzej:
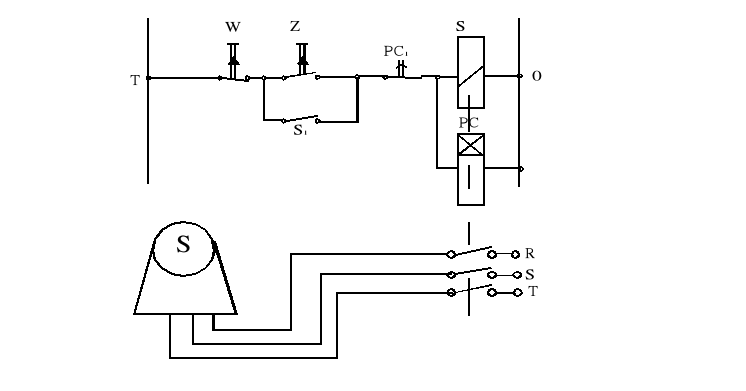
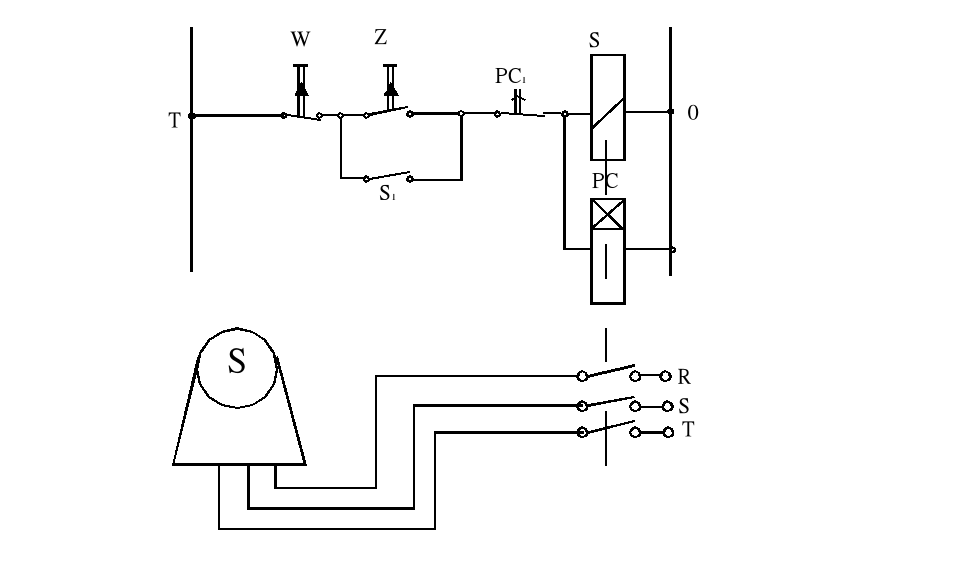
UKŁAD STERUJĄCY PRACĄ SILNIKA.
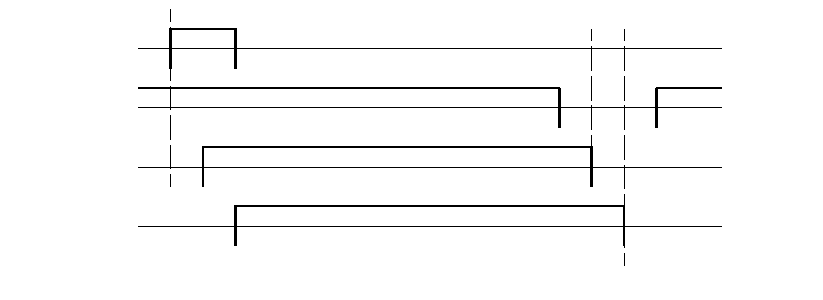
W tym przypadku mamy układ sterujący, który steruje silnikiem trójfazowym. Przy załączeniu obwodu jednocześnie uruchamiamy silnik. Wyłączenie następuje bądź po określonym czasie, dzięki przekaźnikowi PC, lub przez wciśnięcie wyłącznika.
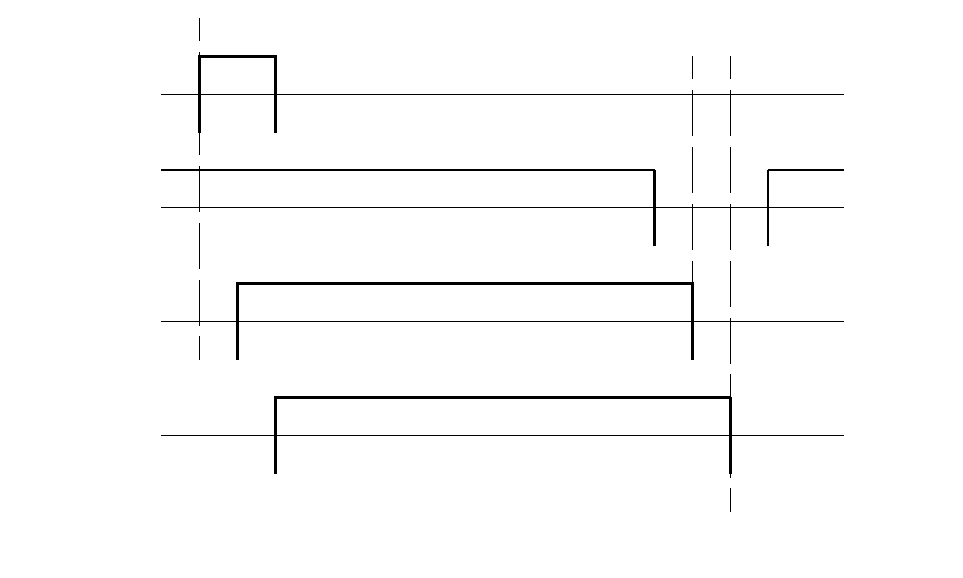
Wykres czasowy do ukł. znajdującego się powyżej
WNIOSKI:
1. kompensacja mocy biernej odbywa się za pomocą kondensatora do poprawy wypadkowego współczynnika mocy w punkcie odbiornikowym,
2. kondensator włączony do sieci pobiera moc bierną pojemnościową, co można traktować jako źródło mocy biernej indukcyjnej,
3. odbiory indukcyjne u odbiorcy czerpią wtedy część mocy biernej z pobliskiej baterii kondensatorów i nie obciążają układu przesyłowego,
4. zmniejszają się straty napięć pochodzące od składowej biernej prądu,
5. zwiększają się spadki napięć odbiornikowych,
6. podnosi się sprawność układu zasilania,
7. starta mocy w linii jest większa od straty napięcia, która jest większa od spadku napięcia,
8. przepływ prądu biernego do odbiornika powoduje dodatkową stratę mocy czynnej w linii,
9. spadek napięcia jest równy podłużnej stracie napięcia.
W
Z
S
S
1
PC
PC
1
S
Wyszukiwarka