Zadanie proste kinematyki:
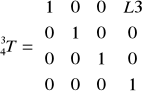
W podstawie manipulatora wiążemy układ współrzędnych, tak że nasz początkowy układ współrzędnych ma postać:
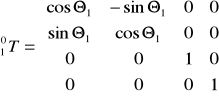
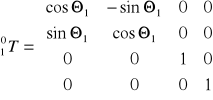
Pierwsze przekształcenie układu 0 w układ 1 polega na obrocie wokół osi Z o kąt Ө1:
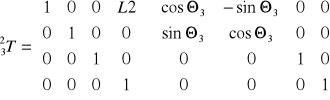
Drugie przekształcenie układu 1 w układ 2 ma postać:

Trzecie przekształcenie:
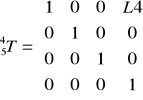
Przekształcenie do układu czwartego:
Układ ostatni ma postać:
A zatem:
![]()
i |
αi-1 |
ai-1 |
di-1 |
Өi-1 |
1 |
0 |
0 |
0 |
90° |
2 |
90° |
0 |
200 |
-45° |
3 |
0 |
150 |
0 |
-60° |
4 |
0 |
100 |
0 |
0 |
5 |
0 |
50 |
0 |
0 |
x0
y0
z0