1.1.
Układem dynamicznym - układ, w którym sygnały czyli przebiegi wielkości fizycznych rozpatruje się jako funkcje czasu. Według innej definicji jest to układ opisany przez trójkę: s:={T, W, B}, gdzie: T - zbiór chwil czasowych, W - zbiór wartości sygnałów (wartości sygnałów tworzą przestrzeń),
B zbiór trajektorii w:=T→W spełniających prawa rządzące obiektem (określające zachowanie obiektu).
Model matematyczny układu dynamicznego - sformalizowany model układu dynamicznego. Podstawy formalizacji tworzą spostrzeżenia:
własności obiektów dynamicznych mogą być opisane przy pomocy modeli (sformalizowanych),
dla opisu własności dynamicznych różnych obiektów dynamicznych poszukuje się takich samych (wspólnych) metod.
Układ dynamiczny nazywamy:
układem ciągłym - jeśli T=R, gdzie R - zbiór liczb rzeczywistych, czyli czas jest zmienną ciągłą,
układem dyskretnym - jeśli T=C, gdzie C - zbiór liczb całkowitych, czyli czas jest zmienną dyskretną.
Istnieje wiele klas modeli matematycznych układów dynamicznych. Jedną z takich klas to klasa modeli wejściowo-wyjściowych.
Własności obiektów dynamicznych:
przebiegi sygnałów układu dynamicznego w czasie zależą nie tylko od aktualnych wartości wymuszeń, ale zależą także od wymuszeń, które były w przeszłości, aby układ był układem dynamicznym musi zawierać co najmniej jedną zmienną stanu, niekiedy do opisu układu dynamicznego wystarczą opisy wejść i wyjść bez jawnego wprowadzenia zmiennych stanu, przechowują także energię.
Stanem układu nazywamy najmniej liczny zbiór wielkości dostarczających ilość informacji, które wystarczają do oceny zachowania się układu (obiektu) w przyszłości czyli jednoznacznie określają zachowanie się układu.
współrzędne wektora stanu w przestrzeni stanów (współrzędne końca wektora stanu).
Badanie podstawowych członów dynamicznych
|
gdzie:
- X(t) - wektor stanu;
- Y(t) - wektor sygnałów wyjściowych;
- U(t) - wektor sygnałów wejściowych;
- A - macierz stanu;
- B - macierz wejść;
- C - macierz wyjść;
- D - macierz transmisyjna układu
Schemat modelu badanego w ćwiczeniu
1.2.
Aby otrzymać człony dynamiczne należało z równań stanu oraz równań wyjść wyznaczyć macierze A, B, C i D i na ich podstawie nastawić odpowiednie parametry modelu.
CZŁON PROPORCJONALNY (BEZINERCYJNY)
Ogólna postać równań elementu bezinercyjnego: y=kx
y - wielkość wyjściowa;
x - wielkość wejściowa;
k - współczynnik proporcionalniości (współczynnik wzmocnienia).
Transmitancja G(s)=y(s)/x(s)=k
Równanie charakterystyki statycznej y=kx lub yo=kxo+C
C - stała określająca przesunięcie charakterystyki w stosunku do układu współrzędnych.
Wymuszenie skokowe x(t)=1(t)xst będzie y(t)=1(t)kxst
Wymuszenie U''>U'




CZŁON CAŁKUJĄCY
Ogólna postać równania różniczkowego dy/dt=kx lub po scałkowaniu , przy zerowych
warunkach początkowych y=koƒt x dt
transmitancja G(s)=y(s) / x(s) =k/s współczynnik k: k=dy/dt /x
wymuszenie skokowe x(t)=1(t)xst wyznaczamy
y(s)=k/s ∗x(s)=k/s2 ∗ xst
y(t)=α-1[y(s)]=kxstt
Gdy wejście i wyjście są sygnałami jednoimiennymi, współczynnik k ma wymiar odwrotności czasu Tdy/dt=x , której odpowiada transmitancja G(s)=y(s)/x(s)=1/Ts
T-stała czasowa akcji całkującej (stała całkująca)
{G(s)=k/s(1+Ts)}

![]()
Wymuszenie U''>U'




CZŁON INERCYJNY
Ogólna postać równania różniczkowego elementu inercyjnego I rzędu: T dy/dt + y=kx
transmitancja G(s)=y(s)/x(s) = k/ Ts+1 k- współczynnik proporcjonalności ;
T- stała czasowa
równanie charakterystyki statycznej y=kx
wymuszenie skokowe x(t)=1(t)xst zgodnie z tablic otrzymujemy : x(s)=1/s∗xst
y(s)=k/s(Ts+1) xst=k/T xst ∗ 1/s(s+1/T)
y(t)=α-1[y(s)]=k/T xstT(1-e-t/T)
y(t)=kxst(1-e-t/T)
Wymuszenie U''>U'




CZŁON RÓŻNICZKUJĄCY
Rzeczywiste elementy różniczkujące
ogólna postać równania rzeczywistego elementu różniczkującego : T dy/dt +y =k dx/dt
transmitancja G(s)=y(s)/x(s)=Ts/Ts+1
odpowiedź na wymuszenie skokowe z transmitancji y(s)=ks/Ts+1 ;
x(s)=kxst /Ts+1=k/T xst1 /s+1/T ; y(t)=α-1[y(s)]=k/T xst e-t/T
Wymuszenie U''>U'




CZŁON DWUINERCYJNY
Wymuszenie U''>U'




CZŁON PROPORCJONALO - CAŁKUJĄCY
Wymuszenie U''>U'




CZŁON OSCYLACYJNY
Ogólna postać równania różniczkowego oscylacyjnego
T12 d2y/dt2 + T2 dy/dt + y = kx przy czym T22<4T12
transmitancja G(s)=y(s)/x(s)=k/ T12 s2 +T2 s+1
Wymuszenie U''>U'




1.3.
Kolejnym zadaniem było badanie prostego układu regulacji którego schemat jest podany poniżej:
Dla tego układu należało napisać równanie stanu tego, należało także sprawdzić warunki sterowalności, obserwowalności i stabilności
Równanie stanu tego układu:
![]()
Transmitancja dwóch elementów połączonych szeregowo:
Transmitancja wypadkowa:
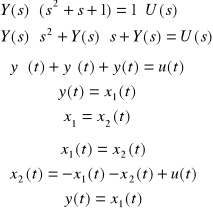
Z powyższego układu równań wypisujemy macierze:
sterowalność i obserwowalność dla 
stabilność dla 
oraz dla 
Sterowalność
Układ jest sterowalny (całkowicie), gdy: ograniczone przedziałami ciągłe sterowanie U(t) przeprowadza układ z dowolnego stanu początkowego X(t0) w chwili t=t0 do dowolnego stanu końcowego X(tk) w chwili t=tk w skończonym przedziale czasu
tk-t0=0.
Sterowalność oznacza możliwość osiągnięcia dowolnego stanu układu w skończo-nym czasie za pomocą dopuszczalnego sterowania.
Układ sterowalny to układ, w którym wektor sygnałów wejściowych oddziaływuje na wszystkie zmienne stanu, czyli zapewnia skuteczne sterowanie, zmiana wektora wejść wywołuje różne zmiany każdej współrzędnej stanu.
Warunek sterowalności: warunkiem koniecznym i dostatecznym (wystarczającym) sterowalności jest, aby macierz
o n - wierszach i m - kolumnach miała rząd n, czyli n - liniowo niezależnych kolumn.
![]()
Warunek: ![]()
; 
; 

; ![]()
układ jest sterowalny
Obserwowalność:
Układ jest obserwowalny - przy danym dowolnym sterowaniu U(t), istnieje skończona chwila tk, po której, na podstawie znajomości wektora sygnałów wyjściowych Y(t) i wektora sterowania U(t) w przedziale od t0 do tk można wyznaczyć stan układu X(t0) w dowolnej chwili początkowej t0.
Obserwowalność - na podstawie przebiegu sygnału wyjściowego w skończonym przedziale czasu, można określić stan układu w dowolnej chwili tego prze-działu.
Układ obserwowalny - układ w którym istnieją relacje między wszystkimi sygnałami wektora wyjściowego, a sygnałami wektora stanu, czyli na podstawie przeprowadzonej w skończonym czasie obserwacji (analizy) sygnałów wyjściowych i sterujących można jednoznacznie określić wektor stanu początkowego, zmiana wektora stanu wywołuje różne zmiany wyjścia czyli musi zachodzić odróżnienie wpływu każdej zmiennej stanu na zmianę obserwowanego wektora wyjść.
Warunek obserwowalności: warunkiem koniecznym i dostatecznym (wystarczającym) obserwowalności jest, aby macierz:
o wymiarach m x n miała rząd n, czyli zawierała n - liniowo niezależnych wierszy. Dla ułatwienia analizy macierzy O, wprowadza się macierz W, która jest transpozycją macierzy O. Warunek obserwowalności odnoszący się do macierzy W formułuje się następująco: układ jest całkowicie obserwowalny wtedy i tylko wtedy, gdy rząd macierzy
jest równy n.
![]()
Warunek: ![]()
; 


; ![]()
układ jest obserwowalny
Stabilność:
Liniowy układ dynamiczny nazywamy stabilnym, jeżeli dla wszystkich stanów początkowych X(t0) przy braku wymuszeń sygnał wyjściowy pozostaje ograniczony, zaś asymptotycznie stabilnym jeżeli również przy dowolnym ograniczonym sygnale wejściowym sygnał wyjściowy pozostaje ograniczony.
Stabilność układu sprawdzamy na podstawie równania charakterystycznego układu. Wszystkie człony równania charakterystycznego muszą mieć wartość dodatnią. Aby wyznaczyć równanie charakterystyczne układu należy obliczyć wyznacznik
z następującej zależności:
![]()
gdzie: I - macierz jednostkowa;
A - macierz stanu;
Sprawdzanie stabilności układu z zadaną macierzą stanu 


Ponieważ jeden z członów równania charakterystycznego układu posiadającego macierz stanu 
ma wartość ujemną, to układ nie jest stabilny.
Sprawdzanie stabilności układu z zadaną macierzą stanu 

Powyższe równanie posiada dwa pierwiastki zespolone: ![]()
; ![]()
Ponieważ warunek, aby wartość rzeczywista pierwiastków zespolonych była mniejsza od zera (w naszym przypadku brak jest wartości rzeczywistej w pierwiastkach zespolonych) nie jest spełniony, układ posiadającego macierz stanu 
nie jest stabilny.
Kolejną czynnością było badanie członu oscylacyjnego ( macierzy A)
Za każdym razem zmienialiśmy jedną wartość z macierzy A i badaliśmy wpływ tej zmiany na charakter układu.
Macierze mają następują postać
; 
; 
; 
; 
; 
; 
; 
; 
; 
; 
; 
; 
Następnie badaliśmy oscylację zmieniając wartość współczynnika tłumienia.

; 
; 
; 

; 
; 
; 
2.
Układ dynamiczny, to dowolny układ fizyczny, rozpatrywany z punktu widzenia jego zachowania się w czasie. Otrzymane w trakcie Ćwiczenia przebiegi z badanych układów dostarczają nam informację o stanie układu. Znając transmitancję układu można wyznaczyć odpowiedź Y(t) układu, przy dowolnym wymuszeniu u(t). Związki między wymuszeniami, a stanem układu nazywamy równaniami stanu.
W pierwszej części ćwiczenia badaliśmy różne człony dynamiczne modelując odpowiednio macierze A, B, C i D na stanowisku badawczym. Wszystkie charakterystyki skokowe otrzymane podczas badań są zgodne z charakterystykami teoretycznymi. Z powodu ograniczeń tablicy pomiarowej układu dynamicznego w dwóch członach musieliśmy zmienić parametry macierzy C i D tak aby charakterystyka skokowa była zgodna z teoretyczną. Badanie każdego elementu dynamicznego przeprowadziliśmy dla różnych wymuszeń. Dla członu oscylacyjnego dokonaliśmy kilku zmian parametrów macierzy A, przez co uzyskaliśmy kilka różnych charakterystyk skokowych o różnych tłumieniach. Kolejnym etapem było badanie prostego układu regulacji. Po napisaniu równania stanu tego układu i wyznaczeniu macierzy A, B, C, oraz D, zamodelowaliśmy działanie tego układu na stanowisku. Otrzymaliśmy przebieg oscylacyjny tłumiony. Szeregowe połączenie elementu inercyjnego i całkującego powoduje uzyskanie na skutek wymuszenia elementu oscylacyjnego tłumionego. Po sprawdzeniu warunków sterowalności, obserwowalności i stabilności okazało się, że układ jest sterowalny i obserwowalny, a stabilny jest tylko dla jednej z zadanych macierzy stanu.
Człon oscylacyjny dany następującymi równaniami:
x1=ωn2 x2
x2= -x1-2ξωx2+u(t)
y1=kx1
Z przeprowadzonego ćwiczenia wynika, że sposobami zmiany jakości drgań są:
a11 - zwiększa amplitudę odpowiedzi, fizycznie jest to pulsacja.
a12 - powoduje oscylacje, fizycznie odpowiada to częstotliwości naturalnej.
a21 - tłumi wykres odpowiedzi do zera,
a22 - tłumi oscylacje. zmienia oscylację - niewielka zmiana tego współczynnika powoduje, że odpowiedź układu jest sygnałem o stałej amplitudzie sygnału (człon oscylacyjny - zmiana a22 z wartości -1 na 0). Dalsze zwiększenie (do wartości 1) powoduje bardzo silne wzmocnienie sygnału. Zmniejszenie natomiast wartości do -7 powoduje tłumienie oscylacji - współczynnik wzmocnienia staje się współczynnikiem tłumienia sygnału. Fizycznie jest to współczynnik tłumienia względnego członu.
Macierz D powoduje zaś, że odpowiedź na wymuszenie w czasie t=0 osiąga wartość wymuszenia i dalej maleje lub rośnie zależnie od charakteru członu.
Wyszukiwarka