Pytanie 1 : Uchyb nadążania można sprowadzić dokładnie do zera przez:
1) zwiększenie wzmocnienia,[Author ID0: at Thu Nov 30 00:00:00 1899
]
2) zmniejszenie wzmocnienia,[Author ID0: at Thu Nov 30 00:00:00 1899
]
3) wprowadzenie członu różniczkującego,[Author ID1: at Fri Jun 4 20:12:00 2010
]
4) wprowadzenie członu całkującego,
5) wyeliminowanie zakłóceń,[Author ID1: at Fri Jun 4 20:13:00 2010
]
6) poszerzenie pasma re[Author ID1: at Fri Jun 4 20:13:00 2010
]gulacji.[Author ID1: at Fri Jun 4 20:13:00 2010
]
Pytanie 2 : Algorytm regulacji PD należy stosować gdy:
1) przebiegi sygnałów są szybkie - o dużej częstotliwości,
2) przebiegi sygnałów w układzie są podobne,[Author ID0: at Thu Nov 30 00:00:00 1899
]
3) gdyż istnieje potrzeba stłumienia szumów pomiarowych,[Author ID0: at Thu Nov 30 00:00:00 1899
]
4) gdyż należy zapewnić zero[Author ID1: at Fri Jun 4 20:13:00 2010
]w[Author ID1: at Fri Jun 4 20:13:00 2010
]y uchyb ustalony.[Author ID1: at Fri Jun 4 20:13:00 2010
][Author ID1: at Fri Jun 4 20:13:00 2010
]
Pytanie 3 : Jakie regulatory otrzymamy dla następujących dwóch połączeń:
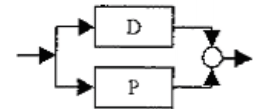
1) PI i PI,[Author ID1: at Fri Jun 4 20:13:00 2010
]
3) I i PD,[Author ID1: at Fri Jun 4 20:13:00 2010
] [Author ID1: at Fri Jun 4 20:13:00 2010
] [Author ID1: at Fri Jun 4 20:13:00 2010
][Author ID1: at Fri Jun 4 20:13:00 2010
]
6) PI i PD.
Pytanie 4 : Uchyb ustalony w układzie określa jego (pytanie podchwytliwe):
1) dokładność,
2) zapas stabilności, [Author ID0: at Thu Nov 30 00:00:00 1899
]
3) zachowanie się w czasie regulacji,[Author ID0: at Thu Nov 30 00:00:00 1899
]
4) wzmocnienie statyczne.[Author ID1: at Fri Jun 4 20:13:00 2010
]
Pytanie 5 : Które z wymienionych wielkości należą do parametrów nastawialnych uniwersalnych regulatorów przemysłowych:
1) wzmocnienie,
2) stała czasowa,[Author ID0: at Thu Nov 30 00:00:00 1899
]
3) czas [Author ID1: at Fri Jun 4 20:14:00 2010
]regulacji,[Author ID0: at Thu Nov 30 00:00:00 1899
]
4) przeregulowanie,[Author ID1: at Fri Jun 4 20:14:00 2010
]
5) czas zdwojenia,
6) czas wyprzedzenia,
7) stopień astatyzmu.[Author ID1: at Fri Jun 4 20:14:00 2010
]
Pytanie 6 : Kryterium stabilności Nyquista opiera się na analizie:
1) charakterystyki amplitudowo - fazowej układu zamkniętego,[Author ID0: at Thu Nov 30 00:00:00 1899
]
2) charakterystyki skokowej układu otwartego,[Author ID0: at Thu Nov 30 00:00:00 1899
]
3) charakterystyki skokowej układu zamkniętego,[Author ID1: at Fri Jun 4 20:14:00 2010
]
4) charakterystyki amplitudowo - fazowej układu otwartego.
Pytanie 7 : Układ ma transmitancję G(s)=k/((1+sT1)(1-sT2)s. Układ ten jest:
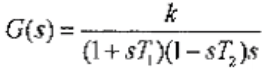
1) lokalnie stabilny asymptotycznie,[Author ID1: at Fri Jun 4 20:14:00 2010
] [Author ID1: at Fri Jun 4 20:14:00 2010
][Author ID0: at Thu Nov 30 00:00:00 1899
]
2) stabilny w sen[Author ID1: at Fri Jun 4 20:14:00 2010
]sie Lapunowa,[Author ID1: at Fri Jun 4 20:14:00 2010
]
3) niestabilny,[Author ID1: at Fri Jun 4 20:14:00 2010 ]
4) globalnie stabilny asymptotycznie.[Author ID1: at Fri Jun 4 20:14:00 2010
]
Pytanie 8 : Transmitancja operatorowa to:
1) pojemność kanału transmisyjnego,[Author ID0: at Thu Nov 30 00:00:00 1899
]
2) Przekształcenie Laplaca'a, [Author ID1: at Fri Jun 4 20:14:00 2010
]
3) rodzaj opisu dynamiki układów (stosunek : transformat Laplaca'a sygnałów wyj. do wej. ),
4) rodzaj charakterystyki częstotliwości układu.[Author ID1: at Fri Jun 4 20:14:00 2010
]
Pytanie 9 : W układzie regulacji automatycznej wejściem regulatora jest:
1) sygnał zadający,[Author ID0: at Thu Nov 30 00:00:00 1899
]
2) sygnał regulowany,[Author ID1: at Fri Jun 4 20:14:00 2010
]
3) sygnał uchybu ( e(f) - sygnał uchybu sterowania ),
4) sygnał sterujący,[Author ID0: at Thu Nov 30 00:00:00 1899
]
5) sygnał sprzężenia[Author ID1: at Fri Jun 4 20:15:00 2010
].[Author ID1: at Fri Jun 4 20:15:00 2010
][Author ID1: at Fri Jun 4 20:15:00 2010
]
Pytanie 10 : Człon inercyjny I-go rzędu to:
1) inna nazwa czwórnika elektrycznego[Author ID1: at Fri Jun 4 20:15:00 2010
],[Author ID1: at Fri Jun 4 20:15:00 2010
][Author ID0: at Thu Nov 30 00:00:00 1899
]
2) specyficzny układ regulacji przeznaczony do sterowania obiektów o różnej naturze fizycznej[Author ID1: at Fri Jun 4 20:15:00 2010
],[Author ID1: at Fri Jun 4 20:15:00 2010
][Author ID1: at Fri Jun 4 20:15:00 2010
]
3) model matematyczny układów wspólny dla specyficznych układów o dowolnej naturze fizycznej,
4) pierwszy rezystor w każdym rzędzie czwórnika[Author ID1: at Fri Jun 4 20:15:00 2010
].[Author ID1: at Fri Jun 4 20:15:00 2010
][Author ID1: at Fri Jun 4 20:15:00 2010
]
Pytanie 11 : Jeśli otwarty układ sterowania jest stabilny to będzie również stabilny po zamknięciu w przypadku:
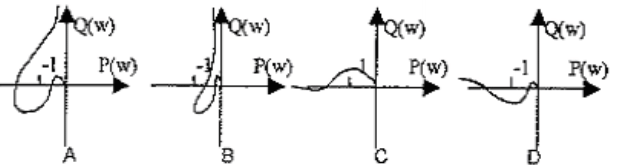
1) A i D[Author ID1: at Fri Jun 4 20:15:00 2010
],[Author ID1: at Fri Jun 4 20:15:00 2010
][Author ID1: at Fri Jun 4 20:15:00 2010
]
2) A i C[Author ID1: at Fri Jun 4 20:15:00 2010
],[Author ID1: at Fri Jun 4 20:15:00 2010
][Author ID0: at Thu Nov 30 00:00:00 1899
]
3) A i B[Author ID1: at Fri Jun 4 20:15:00 2010
],[Author ID1: at Fri Jun 4 20:15:00 2010
][Author ID1: at Fri Jun 4 20:15:00 2010
]
4) B i C,
5) B i D[Author ID1: at Fri Jun 4 20:15:00 2010
],[Author ID1: at Fri Jun 4 20:15:00 2010
][Author ID1: at Fri Jun 4 20:15:00 2010
]
6) C i D[Author ID1: at Fri Jun 4 20:15:00 2010
].[Author ID1: at Fri Jun 4 20:15:00 2010
][Author ID1: at Fri Jun 4 20:15:00 2010
]
Pytanie 12 : Dla układu z obiektem stabilnym wzrost wzmocnienia powoduje:
1) polepszenie dokładności i pogorszenie stabilności,
2) polepszenie dokładności i stabilności[Author ID1: at Fri Jun 4 20:15:00 2010
],[Author ID1: at Fri Jun 4 20:15:00 2010
][Author ID0: at Thu Nov 30 00:00:00 1899
]
3) pogorszenie dokładności i polepszenie stabilności[Author ID1: at Fri Jun 4 20:15:00 2010
],[Author ID1: at Fri Jun 4 20:15:00 2010
][Author ID0: at Thu Nov 30 00:00:00 1899
]
4) pogorszenie dokładności i stabilności[Author ID1: at Fri Jun 4 20:15:00 2010
],[Author ID1: at Fri Jun 4 20:15:00 2010
][Author ID0: at Thu Nov 30 00:00:00 1899
]
5) nie wpływa na stabilność i dokładność układu[Author ID1: at Fri Jun 4 20:15:00 2010
].[Author ID1: at Fri Jun 4 20:15:00 2010
][Author ID1: at Fri Jun 4 20:15:00 2010
]
Pytanie 13 : Jeżeli w URA zostanie zastosowany regulator, który poszerzy pasmo przenoszenia to wpłynie to na:
1) zmniejszenie uchybu ustalonego[Author ID1: at Fri Jun 4 20:16:00 2010
],[Author ID1: at Fri Jun 4 20:16:00 2010
][Author ID0: at Thu Nov 30 00:00:00 1899
]
2) zwiększenie uchybu ustalonego[Author ID1: at Fri Jun 4 20:16:00 2010
],[Author ID1: at Fri Jun 4 20:16:00 2010
][Author ID0: at Thu Nov 30 00:00:00 1899
]
3) wydłużenie czasu regulacji[Author ID1: at Fri Jun 4 20:16:00 2010
],[Author ID1: at Fri Jun 4 20:16:00 2010
][Author ID1: at Fri Jun 4 20:16:00 2010
]
4) skrócenie czasu regulacji - 99,9%,
5) zmniejszenie przeregulowania[Author ID1: at Fri Jun 4 20:16:00 2010
],[Author ID1: at Fri Jun 4 20:16:00 2010
][Author ID1: at Fri Jun 4 20:16:00 2010
]
6) zwiększenie przeregulowania[Author ID1: at Fri Jun 4 20:16:00 2010
].[Author ID1: at Fri Jun 4 20:16:00 2010
][Author ID1: at Fri Jun 4 20:16:00 2010
]
Pytanie 14 : Charakterystyki częstotliwościowe układu dynamicznego pozwalają bezpośrednio określić:
1) odpowiedź skokową układu w funkcji częstotliwości[Author ID1: at Fri Jun 4 20:16:00 2010
],[Author ID1: at Fri Jun 4 20:16:00 2010
][Author ID0: at Thu Nov 30 00:00:00 1899
]
2) trajektorię fazową [Author ID1: at Fri Jun 4 20:16:00 2010
]układu w funkcji częstotliwości,[Author ID1: at Fri Jun 4 20:16:00 2010
][Author ID1: at Fri Jun 4 20:16:00 2010
]
3) wzmocnienie i przesunięcie fazowe w funkcji częstotliwości,
4) uchyb i czas regulacji w funkcji częstotliwości[Author ID1: at Fri Jun 4 20:16:00 2010
].[Author ID1: at Fri Jun 4 20:16:00 2010
][Author ID1: at Fri Jun 4 20:16:00 2010
]
Pytanie 15 : Spośród podstawowych członów dynamicznych zjawisko rezonansu może zachodzić w:
1) dowolnym członie dynamicznym[Author ID1: at Fri Jun 4 20:16:00 2010
],[Author ID1: at Fri Jun 4 20:16:00 2010
][Author ID1: at Fri Jun 4 20:16:00 2010
]
2) tylko w członach Inercyjnych[Author ID1: at Fri Jun 4 20:16:00 2010
],[Author ID1: at Fri Jun 4 20:16:00 2010
][Author ID0: at Thu Nov 30 00:00:00 1899
]
3) w członie różniczkującym i oscylacyjnym[Author ID1: at Fri Jun 4 20:16:00 2010
],[Author ID1: at Fri Jun 4 20:16:00 2010
][Author ID1: at Fri Jun 4 20:16:00 2010
]
4) tylko w członie oscylacyjnym.
Wyszukiwarka