TEMAT: POMIAR PRZESUNIĘCIA FAZOWEGO W OBWODZIE PRĄDU PRZEMIENNEGO.
1. Wiadomości wstępne.
Prądem zmiennym nazywamy prąd o zmieniającym się w czasie natężeniu. Gdy okresowo zmienia się również kierunek prądu, prąd nazywamy przemiennym.W praktyce najczęściej stosuje się prąd o natężeniu i napięciu zmieniającym się sinusoidalnie:
I = I0 sin(ω t + ϕ1),
U = U0 sin(ω t + ϕ2).
Wielkości I oraz U nazywamy odpowiednio natężeniem i napięciem chwilowym, natomiast I0, U0 - odpowiednio natężeniem i napięciem maksymalnym; ϕ jest fazą początkową, a ω - częstością kołową lub pulsacją:
,
gdzie ν oznacza częstotliwość a T - okres.
Jeśli obwód prądu zmiennego zawiera, oprócz oporu omowego, indukcyjność lub pojemność, to przebiegi napięcia i natężenia różnią się fazą. Przyczyną opóźnienia prądu względem napięcia jest zjawisko samoindukcji, a wyprzedzenie napięcia przez prąd jest wynikiem ładowania kondensatora. Gdy obwód składa się z oporu omowego, pojemności i indukcyjności, przesunięcie fazowe wyraża się wzorem:
,
gdzie: R - opór, L - indukcyjność, C - pojemność.
Przesunięcie fazowe ϕ między napięciem i natężeniem prądu możemy zbadać za pomocą oscyloskopu, przykładając na płytki odchylania pionowego zmiany napięcia, a na płytki odchylania poziomego - zmiany prądu. Ruch plamki świetlnej na ekranie oscyloskopu jest wynikiem nałożenia się dwóch ruchów harmonicznych o tej samej częstotliwości i różnicy faz ϕ. Oznaczmy wychylenia chwilowe w kierunku poziomym przez x w kierunku pionowym przez y i wychylenie maksymalne przez a. Wówczas zmiany czasowe obu wychyleń opisują równania:
x = a sin(ω t + ϕ),
y = a sin(ω t).
Gdy różnica faz wynosi zero, wtedy powyższy układ równań można przekształcić do postaci:
y = x.
To równanie przedstawia prostą nachyloną pod kątem 45°. Gdy różnica faz wynosi 90°, wówczas z układu równań otrzymamy równanie okręgu:
x2 + y2 = a2.
W pozostałych przypadkach figura jest elipsą, której spłaszczenie zależy od różnicy faz.
2. Schemat pomiarowy.
3. Wyniki pomiarów.
R = 400 Ω, ν = 800 Hz.
Lp.
- |
L
[H] |
OA
[cm] |
OP
[cm] |
- |
[°] |
1 |
0.01 |
3.3 |
0.4 |
0.1212 |
6.962 |
2 |
0.02 |
3.2 |
0.6 |
0.1875 |
10.807 |
3 |
0.03 |
3.1 |
0.8 |
0.2581 |
14.955 |
4 |
0.04 |
3.0 |
1.0 |
0.3333 |
19.471 |
5 |
0.05 |
2.8 |
1.2 |
0.4285 |
25.377 |
6 |
0.06 |
2.7 |
1.3 |
0.4815 |
28.782 |
7 |
0.07 |
2.6 |
1.4 |
0.5385 |
32.579 |
8 |
0.08 |
2.5 |
1.5 |
0.6000 |
36.870 |
9 |
0.09 |
2.4 |
1.6 |
0.6667 |
41.810 |
10 |
0.10 |
2.3 |
1.5 |
0.6522 |
40.706 |
.
Lp.
- |
C
[μF] |
OA
[cm] |
OP
[cm] |
- |
[°] |
1 |
0.10 |
2.0 |
1.4 |
0.7000 |
44.427 |
2 |
0.20 |
1.8 |
1.3 |
0.7222 |
46.238 |
3 |
0.30 |
1.5 |
1.0 |
0.6667 |
41.810 |
4 |
0.40 |
1.1 |
0.8 |
0.7273 |
46.658 |
5 |
0.45 |
0.9 |
0.6 |
0.6667 |
41.810 |
6 |
0.50 |
0.8 |
0.5 |
0.6250 |
38.682 |
7 |
0.55 |
0.6 |
0.3 |
0.5000 |
30.000 |
8 |
0.60 |
0.8 |
0.5 |
0.6250 |
38.682 |
9 |
0.65 |
0.6 |
0.2 |
0.3333 |
19.471 |
10 |
0.70 |
0.6 |
0.4 |
0.6667 |
41.810 |
4. Wnioski.
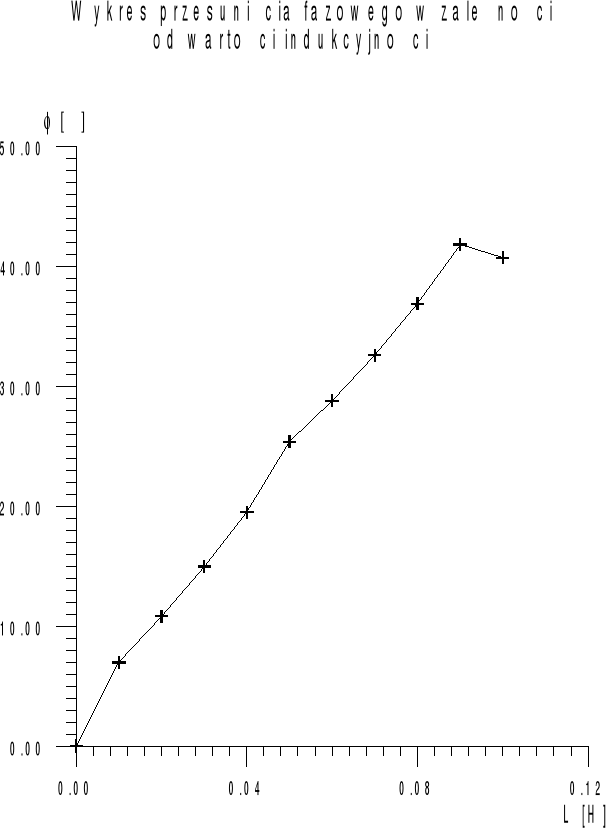
Wraz ze wzrostem wartości indukcyjności cewki rośnie wartość przesunięcia fazowego. Ma to związek z samoindukcją elementu. Im większy prąd płynący przez cewkę, tym większa jest siła przeciwstawiająca się narastaniu prądu. Z tego wynika opóźnienie prądu względem napięcia aż do 90°. Następnie dołączenie kondensatora powoduje wyrównanie kąta ϕ, z powodu opóźnienia napięcia względem prądu o 90°.
Wyszukiwarka