Robert Walentynowicz Wrocław, 12.03.2010
Nr indeksu: 180526
Grupa: TN, śr. 7:30
AiR, Elektronika
SPRAWOZDANIE
Z zajęć `Podstawy Automatyki i Robotyki' z dnia 03.03.2010.
Tematy: 1. Robot przemysłowy IRB 1400
2. Rodzaje i zastosowanie chwytaków
Robot przemysłowy IRB 1400.
Wyprodukowany przez koncern ABB (Asea Brown Boveri Group Ltd.) robot IRB 1400 składa się z manipulatora, szafy sterowniczej oraz stanowiska programowania. Ramię IRB 1400 zawiera 6 przegubów obrotowych V stopnia (7 ogniw w łańcuchu kinematycznym), posiada 6 stopni swobody i 6 osi obrotu - każda wyposażona w silnik prądu zmiennego oraz elektromechaniczne hamulce. Położenie osi mierzą kodery przyrostowe. Maksymalny udźwig ramienia robota wynosi 5 kg przy zasięgu 1,44 m.
Robot jest programowany przy użycia języka wysokiego poziomu Rapid ( stworzonego przez producenta ) zarówna w trybie on, jak i off-line. Dodatkowo możliwe jest sterowanie w układzie współrzędnych wewnętrznych oraz zewnętrznych. Wyposażony w elementy interfejsu użytkownika panel sterowania umożliwia sterowanie oraz programowanie robota.
IRB 1400 zawiera również:
Złącza RS232 i RS422
2 złącza CAN (do obsługi sensorów zewnętrznych)
wejścia/wyjścia analogowe i dwustanowe
układy wykonawcze umożliwiające dołączenie zewnętrznych silników
Opisywany robot najczęściej wykorzystywany jest w procesach technologicznych związanych z manipulacją materiałem, obsługą i montażem maszyn, spawaniem, klejeniem, uszczelnianiem, malowaniem itp.
Chwytaki
2.1 Wstęp
Istotną rolę w funkcjonowaniu robota przemysłowego pełni końcówka robocza
wyposażona w efektor (urządzenie wykonawcze) adekwatne do wykonywanego zadania. Do pozycjonowania narzędzia służy ramię (wykonujące `makroruchy'), uzupełniane przez ogniwa `kiści' manipulatora (realizacja mikroruchów - ruchy lokalne, dokładnie precyzujące położenie i orientację efektora).
Efektorem może być:
specjalistyczna głowica narzędziowa (np. tarcza polerska lub głowica do spawania)
głowica pomiarowa (do zadań diagnostyczno - pomiarowych)
chwytak
Funkcje chwytaka:
Chwytak realizuje trzy podstawowe zadania:
uchwycenie obiektu manipulacji
trzymanie obiektu podczas manipulacji
uwolnienie obiektu w miejscu docelowym
Prawidłowe uchwycenie obiektu zależy od wielu czynników, m.in. kształtu, masy i wymiarów przedmiotu, rodzaju materiału z jakiego został wykonany, środka masy, temperatury itp.
Systematyzacja chwytaków na podstawie sposobu uchwytu:
Chwytak ma na celu nałożenie na transportowany obiekt ograniczeń ruchu w ilości zapewniającej wymagany przebieg transportu. W zależności od sposobu realizacji tego procesu możemy wyróżnić chwytaki:
siłowe - wytworzenie pola sił działających na obiekt. Siły te mogą mieć charakter:
naprężający
przyciągający
kształtowe - odebranie obiektowi wymaganej ilości stopni swobody
siłowo - kształtowe - stosowane najczęściej: końcówki chwytne jednocześnie ograniczają swobodę przemieszczania się obiektu oraz wywierają na niego odpowiedni siły
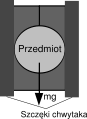
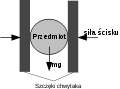
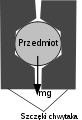
siłowe kształtowe siłowo-kształtowe
Systematyzacja chwytaków na podstawie różnic w budowie:
zawierające sztywne końcówki chwytne - nieodkształcalne podczas wywierania nacisku na obiekty chwytane, łatwość przystosowania chwytaka do różnych obiektów. Wady: zależność sił tarcia od położeń końcówek chwytnych, zmienności siły chwytu w całym zakresie chwytania.
zawierające sprężyste końcówki chwytne
zawierające elastyczne końcówki chwytne - zmieniają swój kształt wskutek dostarczonej energii (np. sprężonego powietrza). Charakteryzują się dobrym przyleganiem do powierzchni obiektu oraz tanim montażem.
chwytaki podciśnieniowe - mogą przenosić jedynie obiekty płaskie lub kuliste o gładkiej powierzchni. Wykorzystują gumowe przyssawki o niskiej trwałości
chwytaki magnetyczne - zawierają magnesy trwałe oraz elektromagnesy w celu wytworzenia pola oddziałującego na ferromagnetyczny obiekt transportowany
zawierające specjalne urządzenia chwytające
Ponadto może podzielić chwytaki na te przeznaczone do stosowanie chwytu zewnętrznego (rys1) oraz do stosowania chwytu wewnętrznego (rys2).
rys1 rys2
Systematyzacja chwytaków na podstawie budowy napędu:
pneumatyczny - wykorzystuje sprężone powietrze. Często wykorzystywany w małych i prostych robotach
hydrauliczny - szczególnie korzystny, gdy producentowi zależy na szybkim przemieszczaniu się robota przy znacznych obciążeniach. Charakteryzuje go krótki czas rozruchu.
elektromagnetyczny - stosowany najczęściej do transportu elementów ferromagnetycznych, których nie sposób uchwycić w inny sposób
adhezyjny - opiera się na przyleganiu ze sobą powierzchniowych warstw chwytaka i przedmiotu będącego obiektem manipulacji
elektryczny
mechaniczny
Systematyzacja chwytaków na podstawie budowy układu przeniesienia napędu:
nożycowy
szczypcowy
imadłowy
opasujący
Systematyzacja chwytaków na podstawie wyposażenia dodatkowego:
Najczęściej spotykanym wyposażeniem dodatkowym chwytaków są:
wymienne nakładki na końcówki chwytne
czujniki:
zbliżenia chwytaka do obiektu - najczęściej jako ten rodzaj czujników stosuje się przetworniki indukcyjne, pojemnościowe oraz optyczne
dotyku końcówek chwytnych do przedmiotu - stosuje się elementy stykowe umieszczone w korpusie chwytaka w taki sposób, aby zmiana położenia końcówki chwytnej skutkowała ich przełączeniem
nacisku końcówek chwytnych na przedmiot - wykorzystuje się przetworniki tensometryczne
temperatury
pomocnicze urządzenia technologiczne - stanowiące część korpusu chwytaka lub mocowane na nim i sterowane niezależnie. Mogą realizować zadania:
właściwe ukierunkowanie manipulowanego przedmiotu
technologiczne (ich realizacja nie wpływa na pewność uchwytu)
Metodyka doboru chwytaków robotów przemysłowych
Niezwykle istotnym aspektem procesu technologicznego jest prawidłowy wybór rodzaju chwytaka. Metodyka takiego doboru składa się z:
wyboru sposobu uchwycenia - Prawidłowy uchwyt zależy od:
sposobu unieruchomienia obiektu w chwytaku
parametrów obiektu manipulacji
wzajemnego startowego ustawienia chwytaka i obiektu
warunków dynamicznych procesu manipulacji
wyboru zasady działania chwytaka
dobraniu parametrów konstrukcyjnych chwytaka
przystosowaniu końcówek chwytnych do kształtu powierzchni przedmiotu
BIBLIOGRAFIA:
[1] „Podstawy robotyki: teoria i elementy manipulatorów i robotów”, praca zbiorowa pod red. Adama Moreckiego i Józefa Knapczyka, Wydawnictwa Naukowo-Techniczne, Warszawa, 1993.
[2] „Podstawy robotyki”, Witold Jacak, Krzysztof Tchoń, Wydawnictwo Politechniki Wrocławskiej, Wrocław, 1992.
[3] „Teoria robotyki”, dr inż. Tomasz Buratowski, Akademia Górniczo-Hutnicza - dostępne on-line: http://www.robotyka.com/teoria_spis.php
[4] rys 1 oraz 2, schematy sposobu uchwytu za: http://pl.wikipedia.org/wiki/Chwytak_(robotyka)
Wyszukiwarka