![]()
Wcięcie kątowe wprzód: Dane: M, N; Mierzone: α, β; Wyznaczane: XP, YP.
![]()
Wcięcie liniowe: Dane: A, B; Mierzone: d1, d2; Wyznaczane XP, YP, γ- ze współrzędnych
![]()
CA=b2+c2-a2 CB=a2+c2-b2
![]()
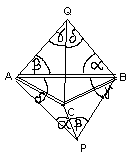
Wcięcie Collinsa: Dane: A, B, C; mierzone: α, β, wyznaczane: XP, YP pośrednio. Łączy się okręgiem punkty A i B i na okręgu wyznacza dowolnie punkt pomocniczy Q, kąty γ i δ i wyznaczamy szukany punkt P wcięciem wprzód. Zadanie staje się niewykonalne jeżeli punkt C znajdzie się na okręgu przechodzącym przez A, B i P.
Elektroniczny pomiar długości: długość: D=1/2 Vτ, gdzie τ = tp - tw (różnica czasów powrotu i wyjścia sygnału), V=c/n- prędkość fali elektromagnetycznej, n=f(t, p, e, λ)- współczynnik załamania fali w powietrzu (zależy od temp, ciśn., wilgotności i dł fali), c-prędkość światła w próżni. Najczęściej używana metoda fazowa (pomiar różnicy faz fali wychodzącej i powracającej)
![]()
Błąd pomiaru długości: Odległość w met. fazowej: D = λ/2 (N + R) + k, gdzie R=Δφ/2π, λ=c/nf, f- częstotliwość wzorcowa, k- stała dodawania.
Transformacja liniowa: parametry transformacji: dX, dY(przesunięcie początku układu), k- wektor przesunięcia, φ- kąt skręcenia, r= dw/dp -współczynnik zmiany skali (dl w ukł wtórnym przez dł w pierw).
Współczynniki transformacji: u= r sinφ, v= r cosφ
![]()
dX= dxv-dyu, dY= dxu+dyv Xi = Xi-1+dX(i-1)-i Yi = Yi-1+dY(i-1)-i
współczynnik zmiany skali r=pierw(u2+v2) i kąt skręcenia układu φ=arctg u/v Pocz. wtórn w pierw:O'(0,0)A(XA,YA)Pocz. pierw w wtórn:O(0;0),A(xA;yA)
![]()
![]()
Transformacja Helmerta: więcej niż 2 punkty dostosowania. x, y- układ pierwotny; X, Y- ukł. wtórny.
1. Bieguny transformacji (śrciężkości):
Δ![]()
![]()
![]()
![]()
xv - Δyu = ΔX
Δyv + Δxu = ΔY
![]()
2. współczynniki u i v:
3. przyrosty dx, dy, dX, dY
4. współrzędne X, Y 5. współczynnik zmiany skali r=pierw(u2+v2) i kąt skręcenia układu φ=arctg u/v.
![]()
Błąd położenia punktu po transformacji: Korekta potransformacyjna (dla punktów wyższych klas niż przeliczane Np z 65 do 2000)
![]()
Długości dit liczymy ze współrz. Wielkości poprawek dodajemy do współrz po transformacji.
Ciąg wliczeniowy- brak drugiego punktu nawiązania. 1. azymut boku A1-2 obieramy dowolnie 2. obliczamy azymuty kolejnych boków An = An-1 - (n-1)*200G+ βn-1 3. obliczamy przyrosty dx=d cosA, dy=d sinA
4. Dodajemy przyrosty i liczymy współrzędny X i Y 5. Wykonujemy transformację do układu wtórnego.
Przeniesienie współrzędnych-bezpośrednio: Dane: M i N; Mierzone: φ, a<500m; Wyznaczany: Pp.
![]()
XPp = XM + a cos(AMN + φ) ![]()
YPp = YM + a sin(AMN + φ)
Błąd wyznaczenia punktu: mPp < 1/3 mM mPp2 = ma2 + a2 m2 φ
![]()
![]()
![]()
Pośrednio- z pośrednim wyznaczeniem elementów przeniesienia, gdy punkty M i N są niedostępne. Z punktu przeniesienia musi być widoczny punkt macierzysty M i wyższego rzędu N. Z punktu pośredniego B widoczny jest punkt przeniesienia Pp i macierzysty M. Dane: M, N; Mierzone: α, β, γ, c; Wyznaczany Pp. Najpierw oblicza się Azymut AMN i odległość b (ze współrz) i oblicza
Kąt φ=180°- (ψ+γ)azymut AMP=AMN+ φ
XPp = XM + a cos(AMN + φ) YPp = YM + a sin(AMN + φ)
Dodatkowo wyznacza się drugie niezależne wyznaczenie punktu z innej bazy i za ostateczną przyjmuje się średnią (różnica z dwóch pomiarów<1cm). Błąd mPp2 = ma2 + a2 m2 φ
Wyznaczenie ostatniego punktu w ciągu wiszącym: An-1 = A0 + β1 + … + βn-1 - (n-1)*180°
![]()
Xn = x1 + s1 cosA1 +…+sn-1 cosAn-1 Yn = y1 + s1 sinA1 +…+sn-1 sinAn-1
Błąd wyznaczenia ostatniego punktu:
Redukcje odległości skośnych: Dalmierzami optycznymi (ms≤0,02m)mierzy się boki w dwóch seriach. Każda seria obejmuje pomiar temperatury (mt=5°C) i ciśnienia (mp=5mmHg). Centrowanie dalmierza i luster z błędem mc≤2mm. W wyniku uwzględnia się poprawki atmosferyczne i stałą dodawania dalmierza. Redukcje:
Na poziom instrumentu: K1 = -Δh2/2s = s(1-cosα), Δh -przewyższenie, s- odległość skośna, α- kąt pionowy
Na powierzchnię odniesienia: K2 = (-1/R) hp D, R- promień Ziemi = 6367km, hp- wysokość punktu, D-odległość na poziomie instrumentu. Ostatecznie: D = s + K1 + K2 - odległość zredukowana.
Przy przenoszeniu na płaszczyznę odwzorowania uwzględnia się zniekształcenie odwzorowawcze.
Niwelacja trygonometryczna z uwzględnieniem wpływu refrakcji i krzywizny: h = d cosZA + i + d2/2R (1-k) -w, gdzie d-odległość pomierzona, ZA- kąt zenitalny, i-wysokość instrumentu, d2/2R (1-k)- łączny wpływ krzywizny i refrakcji, w- wysokość lustra. Dla krótkich celowych (d<ok. 400m) d2/2R (1-k)<1cm, można pominąć i przyjąć jako powierzchnię odniesienia płaszczyznę.
Wyznaczanie punktu niedostępnego ze stanowisk pośrednich: Pomierzone: q, α, β, γ1, γ2, O1, O2. Wyznaczana wysokość Hp. HpA = O1 + b tg γ1 HpB = O2 + a tg γ2 a/sin α = b/sin β = q/sin(α + β) Hśr=(HpA+HpB)/2 m2HpA = (tg γ1)2 mb2 + (b/cos2 γ1)2 m2 γ1 + mO12 mHśr = mHpA/√2
![]()
![]()
![]()
![]()

![]()
![]()
![]()

Wyszukiwarka