Paweł Panek
WIMIR gr 23B
Projektowanie liniowych układów dynamicznych w przestrzeni stanów, sterowalność i obserwowalność liniowych układów dynamicznych
Cele:
- modelowanie układów dynamicznych w przestrzeni stanów,
- badanie sterowalności i obserwowalności liniowych układów dynamicznych.
Modelowanie układu dynamicznego.
- wielkość wejściowa: Uw
- wielkość wyjściowa: Uc
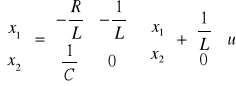
- R=10Ω, L=1H, C=2F
![]()
, ![]()
, ![]()
![]()
![]()
Otrzymujemy na bloku Y wykres:
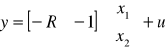
Modelowanie układu dynamicznego w przestrzeni stanów.
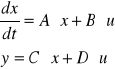
gdzie: x1=i , x2= Uc , y= UL , u= UW
![]()
![]()
![]()
![]()
![]()
Po wpisaniu odpowiednich wartości liczbowych macierzy do bloku State-Space otrzymujemy na bloku Y2 taki sam wykres jak na Y.
Badanie sterowalności.
W programie Matlab za pomocą komendy Qs=ctrb(A,B), otrzymujemy macierz sterowalności (po wprowadzeniu odpowiednich wartości liczbowych do macierzy A i B):
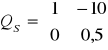
Za pomocą komend rank(A) i rank(Qs), dostajemy odpowiednio wartości rzędów macierzy A i Qs. W obu przypadkach rząd ten wyniósł 2. Na tej podstawie, że rzędy tych macierzy są sobie równe, możemy stwierdzić iż układ jest stabilny.
Badanie obserwowalności.
Podobnie jak wyżej: Q0=obsv(A,C) - otrzymujemy macierz obserwowalności:
,
której rząd wyniósł 2 (równy rzędowi macierzy A), a więc układ jest obserwowalny!
Wyszukiwarka