Sprawozdanie z laboratorium automatyki i robotyki
Sprawozdający: Elżbieta Tchorowska
Data laboratorium: 04.05.2009r.
Cel ćwiczenia:
Zapoznanie się z możliwościami robota ABB IRB 1400, obsługą, jego parametrami technicznymi, programowaniem prostych ruchów manipulacyjnych. Poznanie rodzajów chwytaków, ich klasyfikacji. Rodzaje robotów i stopnie swobody.
Sprawozdanie:

IRb 1400 jest robotem przemysłowym,
składającym się z części sterownika,
oraz z manipulatora. Manipulator posiada
sześć stopni swobody. Maksymalna masa
chwytaka wynosi 5kg. Robot ma dużą
sztywność konstrukcji, bardzo stabilną
podstawę, oraz położony blisko niej środek
ciężkości umożliwiający mu pracowanie przy
bardzo dużych wychyleniach poza obręb
podstawy i sporych prędkościach pracy
manipulatora. Ta ostatnia w trybie ręcznym
była ograniczona do 250 mm/s, natomiast
w trybie automatycznym manipulator
przemieszczał się z prędkościami dużo większymi.
6 stopni swobody podzielonych jest na dwie grupy:
1 - obrót całego manipulatora
2 - wychylenie ramienia
3 - ruch ramienia w górę i w dół
Oraz:
4 - obrót ramienia
5 - ruch chwytaka w górę i w dół
6 - obrót chwytaka
Robotem steruje się za pomocą panelu sterowania w formie przenośnej i dość poręcznej konsoli, wyposażonej w szereg przycisków służących do wyboru dostępnych opcji, trybów i samego programowania, a także wyświetlacza LCD, joysticka i przycisku bezpieczeństwa odblokowywującego silniki. Samo sterowanie manipulatorem odbywa się poprzez wychylanie joysticka. Jest to bardzo wygodne rozwiązanie, szczególnie, że pracuje on w tzw. trybie cyfrowym, tzn. prędkość zmiany położenia wysięgnika jest proporcjonalna do tego jak mocno wychylimy manetkę. Sam interfejs konsoli i wyświetlacza jest bardzo przejrzysty i pozwala na szybkie dostosowanie się do obsługi robota.
Robot może przemieszczać ładunek o wadze do 5 kg oraz przenosić dodatkowe obciążenie na górnym ramieniu (np. podajnik drutu spawalniczego) przy zasięgu 1,44 m. Precyzyjne sterowanie i wysoka powtarzalność zaprogramowanej trajektorii ruchu zapewniają wysoką jakość prac wykonywanych przez robota.
Zdolność do dostosowania prędkości ruchu i dokładności pozycji do wymagań procesu oznacza, że można osiągnąć optymalne parametry produkcji. Robot IRB 1400 posiada sztywną i solidną konstrukcję. Przekłada się to na niskie poziomy emisji hałasu, długie okresy pomiędzy przeglądami oraz długi czas bezawaryjnego użytkowania robota. Przeznaczony jest do środowiska suchego, pomieszczeń o zaostrzonych wymaganiach odnośnie czystości. Robot ten ma dużą strefę roboczą i daleki zasięg. Charakteryzuje go kompaktowa konstrukcja, wąski przegub oraz wysoka wydajność i dobre parametry ruchowe nawet w przypadku wykonywania skomplikowanych reorientacji przy wielu ograniczeniach przestrzeni.
Główne zastosowania robota:
• Spawanie łukowe
• Montaż
• Klejenie / Uszczelnianie
• Obsługa maszyn
• Manipulacje materiałem
Chwytaki do robotów można podzielić na wiele sposobów:
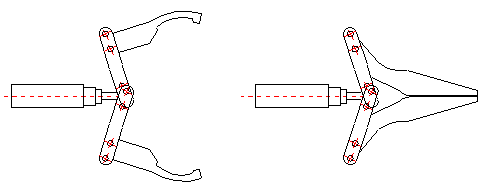
1. Ze względu na realizowany sposób chwytania wyróżnia się chwytaki:
- siłowe (rysunek po lewej)
- kształtowe (rysunek po prawej)
W przypadku chwytaków siłowych siły oddziałujące na obiekt manipulacji mogą być typu:
- naprężającego (ściskającego, rozciągającego)
- przyciągającego
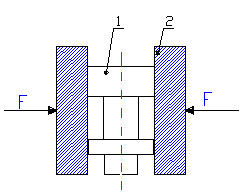
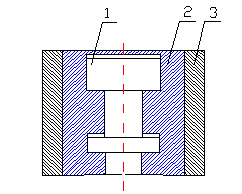
1. obiekt manipulacji |
2. elementy chwytające |
3. nasadki na obiekt |
2. Ze względu na zasadnicze różnice w budowie wyróżniono chwytaki:
- ze sztywnymi końcówkami chwytnymi
- ze sprężystymi końcówkami chwytnymi
- z elastycznymi końcówkami chwytnymi
- adhezyjne (podciśnieniowe, magnetyczne)
- specjalne urządzenia chwytające.
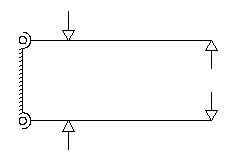
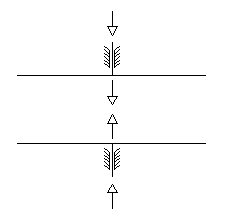
3. W zależności od sposobu przemieszczania się końcówek chwytnych pod wpływem siły wytworzonej przez mechanizm napędowy wyróżnia się ruch końcówek:
- nożycowy (rysunek po lewej)
- szczypcowy (rysunek po prawej)
- imadłowy (rysunek po środku)
4. Podział chwytaków ze względu na parametry użytkowe może dotyczyć:
- dysponowanej siły chwytu
- granicznych wymiarów chwytanego obiektu
- dopuszczalnych kształtów obiektu
- czasu uchwycenia obiektu manipulacji
5. Można wyróżnić również chwytaki przeznaczone do chwytu zewnętrznego (rysunek po lewej) i chwytu wewnętrznego (rysunek po prawej).
Bibliografia:
- oficjalna strona firmy ABB
- dr inż. T. Buratowski: „Teoria robotyki”, rozdział 4.1 - Klasyfikacja chwytaków
- A. Niederliński: „Roboty przemysłowe” Warszawa 1981
2
1
3
4
5
6
Wyszukiwarka