Ćwiczenie nr 10
BADANIE ZALEŻNOŚCI WYDŁUŻENIA SPRĘŻYNY OD OBCIĄŻENIA
Cel ćwiczenia
Wyznaczenie stałej sprężystości sprężyny metodą statyczną. Sprawdzenie prawa Hooke`a.
Wprowadzenie
W ruchu harmonicznym prostym siła działająca na drgające ciało F jest wprost proporcjonalna do wychylenia z położenia równowagi x i zwrócona w stronę położenia równowagi:
|
(10.1) |
gdzie k oznacza stałą proporcjonalności, masę ciała.
Warunek ten spełnia sprężyna obciążoną masą m i dodatkowo wychylona od położenia równowagi. Korzystając z II zasady dynamiki można powyższe równanie przekształcić następująco:
|
(10.2) |
|
(10.3) |
|
(10.4) |
Rozwiązaniem równania różniczkowego:
|
(10.5) |
jest funkcja periodyczna typu sinus lub cosinus:
|
(10.6) |
gdzie:
x(t) - wychylenie z położenia równowagi po czasie t,
A - amplituda czyli maksymalne wychylenie,
ωo - częstość kątowa drgań,
T - okres drgań,
φo - faza początkowa drgań.
Prędkość v i przyśpieszenie a w tym ruchu zmienia się również w sposób periodyczny:
|
(10.7) |
|
(10.8) |
gdzie:
k - w przypadku sprężyny k oznacza stałą sprężystości,
x - wychylenie od położenia równowagi (statyczne).
Okres takich drgań wyrażamy wzorem:
|
(10.9) |
W dokładniejszych obliczeniach, zwłaszcza gdy masa sprężyny ms jest porównywalna z masą obciążnika, uwzględniamy tak zwaną efektywną masę sprężyny
mef = 1/3ms ,która również uczestniczy w drganiach harmonicznych. Wówczas okres takich drgań wyrażamy wzorem:
|
(10.10) |
Ciała wykonujące drgania harmoniczne nazywamy oscylatorem harmonicznym.
Opis stanowiska laboratoryjnego
Wahadło matematyczne, statyw do zawieszania wahadła, przymiar liniowy, stoper.
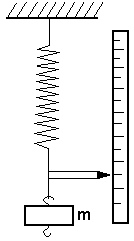
Rys. 10.1 Układ pomiarowy
Program ćwiczenia:
Zawiesić sprężynę na stojaku i na miarce odczytać położenie zerowe końca sprężyny nieobciążonej xo.
Obciążyć sprężynę odważnikiem o masie m1 i zanotować w tabeli położenie końca sprężyny x1.
Powyższą czynność powtórzyć dla przynajmniej 6-u mas dodając do masy m1 koleje obciążniki ( zakres mas skonsultować z prowadzącym zajęcia). Wyniki zapisać w tabeli 10.1.
Wyliczyć dla każdego pomiaru Δxi = xi - xo i siłę Fi = mig [N]
Wyznaczyć niepewności pomiarowe Δxi ,Δmi , ΔFi .
Uwaga: Czy niepewność pomiarowa Δmi, ΔFi zależy od sposobu pomiaru mas. (masa bieżąca podawana jako suma mas pojedynczych obciążników czy masa zważonych razem obciążników)
Tabela 10.1
Δxi = Δmi = ΔF= i
l.p. |
mi [kg] |
Σ mi [kg] |
Σ mi [kg] |
xo [m] |
xi [m] |
Δxi [m] |
Δxi [m] |
Fi = mig [N] |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Sprawozdanie
Korzystając z programu regresja liniowa lub korzystając z arkusza kalkulacyjnego Excel sprawdzić liniowość wykresu F = f(Δxi) oraz zapisać wyliczone przez program współczynniki regresji a, b, Sa, Sb, r.
Na papierze milimetrowym wykonać wykres F= f(Δxi), zaznaczyć na wykresie prostokąty niepewności pomiarowych i poprzez maksymalna ilość prostokątów poprowadzić prostą. Z wykresu wyznaczyć współczynnik kierunkowy prostej. Podać sens fizyczny otrzymanego współczynnika.
Powyższe czynności powtórzyć dla kolejnych sprężyn o innych właściwościach.
Przeprowadzić dyskusję otrzymanych wyników.
Pytania kontrolne
Drgania harmoniczne proste i tłumione.
Wykresy wychylenia, prędkości i przyspieszenia w ruchu harmonicznym.
Ciężar i masa.
Energia w ruchu harmonicznym.
Podaj przykłady układów spełniających warunek ruchu harmonicznego.
69
Wyszukiwarka