Wykład 10
Przykład
W przestrzeni euklidesowej rzeczywistej Rn rzeczywistych ciągów n-wyrazowych okreś-
amy działania
Σ (x1,x2,…xn)+(y1,y2,..y n)=(x1+y1,x2+y2,... ,xn+yn) ,
α(x1,x2,..,xn)=(αx1,αx2,..,αxn)
gdzie x1,y1εIR, n=1,2,..n ,α€IR .
Wtedy (Rn,R) jest rzeczywistą przestrzenną miarą. Wektorem zerowym w tej przestrzenii jest wektor (0,0p).Przestrzeń liniową (Rn,R) będziemy oznaczać przez n wyraz Rn
Analogicznie określamy zespoloną przestrzeń liniową Cn=(Cn,C).
Niech będą dane przestrzenie liniowe
(X,K),(Y,K) oraz odwzorowanie:
T:XY spełniające aksjomaty
a)
T(x+y)=T(x)+T(y) -addytywność
x,y€X
b)
T(αx)=αT(x) - jednorodność
α€K x€X
Wtedy T nazywamy odwzorowaniem liniowym.
Przykład
Odwzorowanie T:R3R2 dane wzorem :
T(x1,x2,x3)=(x1,x2+x3) jest liniowe gdyż :
Dla dowolnych wektorów x=(x1,x2,x3),
y=(y1,y2,y3) oraz dla dowolnego α € IR mamy
T(x+y)=T(x1+y1,x2+y2,x3+y3)=(x1+y1,x2+y2+x3+y3)=(x1,x2,x3)+(y1,y2,y3)=T(x)+T(y),
T(α*x)=T(α(x1,x2,x3))=T(αx1,αx2*x3)=(αx1,α(x2+x3))=α(x1,x2+x3)=α*T(x)
Niech (X,K) będzie przestrzenią liniową oraz niech T: XX będzie odwzorowaniem liniowym.
Def: Wektorem własnym odwzorowania T nazywamy niezerowy wektor x€X (tzn.x€X\{0}) spełniający równanie T(x)=λ*x dla pewnych λ€K. Liczbę lambda spełniające powyższe równanie przy ustalonym wektorze x≠0 nazywamy wówczas wartością własną odwzorowania T.
Mówimy wtedy ze wektor własny x odpowiada wartości własnej λ
Zachodzi następujące twierdzenie:
Twierdzenie 4
Niech K oznacza ciało liczb rzeczywistych liczb zespolonych oraz T:KnKm niech będzie odwzorowaniem liniowym.
Istnieje macierz A=Am*n elementach z K taką,że (׃)
T(x)=A*x
x€Kn
Na odwrót każde odwzorowanie T : KnKm dane wzorem (׃) jest liniowe.
Macierz A we wzorze (׃) nazywamy macierzą odwzorowaną liniowego T.
W przypadku odwzorowania liniowego T:KnKm równanie T(x)=α*x jest na mocy powyższego twierdzenia równoważne równaniu A*x=λ*x lub (.:) (A-λ I)*x=0, gdzie A jest macierzą odwzorowania T, a I macierzą jednostkową.
Jeżeli 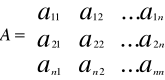
to 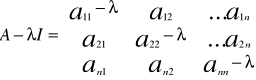
Równanie (:.) posiada rozwiązanie niezerowe wtedy i tylko wtedy gdy:
(::) det(A-λI)=0
Wielomian det(A-λI) zmiennej λ nazywamy wielomianem charakterystycznym odwzorowania T lub macierzy A.
W równaniu (::)det(A-λI)=0 nazywamy równaniem charakterystycznym odwzorowania T lub macierzy A.
Pierwiastki równania (::) to tzw. wartości własne odwzorowania T.
Uwagi:
W przypadku odwzorowania T:KnKm równanie charakterystycznie może nie posiadać pierwiastków rzeczywistych, zatem odwzorowanie to może nie mieć wektorów własnych.
W przypadku odwzorowania T:CnCn równanie charakterystyczne posiada zawsze rozwiązanie a więc odwzorowanie T posiada co najmniej jeden wektor własny.
Przykład:
Dane jest odwzorowanie T:R2R2zaprezentowane przez macierz:

Równanie charakterystyczne ma postać |
![]()
det(A-λI)= 
= λ2 -5λ+4-0
λ1=1, λ2=4
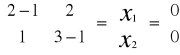
Szukamy wektora własnego x€R2,który odpowiada wartości własnej λ1=1.
{x€R2 : (A-λ1I)*x =0} = {(x1,x2)€R2\(0,0)}
: 
}
={(x1,x2)€R2\{(0,0)}:x1+2x2=0}= {(-2x2,x2):x2€R\{0}} (x1=-2x2)
Zatem każdy wektor (-2α,α), α€R\{0}, odpowiada wartości własnej λ1=1. Podobnie pokazujemy ,że każdy wektor postaci (β,β) , β€R\{0} jest wektorem własnym odwzorowania T odpowiadającym wartości własnej λ1=4.
Iloczyn wektorowy wektorów
W przestrzeni w której dany jest układ prostokątnych 0xyz rozróżnia się dwa rodzaje układów zorientowanych:
-układ prawoskrętny
-układ lewoskrętny
Wyróżniamy i ustalamy jedną z dwóch możliwych orientacji wektorów w przestrzeni 0xyz. Nazwijmy ją orientacją dodatnią
Definicja
Iloczynem wektorowym wektorów niezerowych i nie uwspólnionych ![]()
nazywamy wektor ![]()
taki, że:
1) ![]()
2) trójka uporządkowana ![]()
ma orientację dodatnią
3)![]()
Iloczyn wektorowym dwóch wektorów uspólnionych jest równy wektorowi ![]()
.
Własności iloczynu wektorowego:
a) ![]()
b) ![]()
c) jeżeli ![]()
d) jeżli ![]()
to 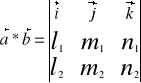
e) pole równoległoboku zbudowanego na wektorach ![]()
jest równe ![]()
Rachunek całkowy funkcji rzeczywistych jednej zmiennej
1)Funkcje pierwotne
Definicja
Funkcję F nazywamy funkcją pierwotną funkcji rzeczywistej f, określonej na przedziale (logarytmicznym lub nie) X![]()
,
i przyjmującej wartości rzeczywiste, jeżeli
![]()
Jeżeli f jest określona na przedziale domkniętym <a,b> to F nazywamy funkcją pierwotną f jeżeli ![]()
oraz ![]()
, ![]()
Niech C1 oznacza dowolną stałą. Jeżeli F jest funkcją pierwotną f, to ponieważ (F(x)+C1)'=F'(x)=f(x), więc G(x)=F(x)+C1 jest też funkcją pierwotną funkcji f.
Wyszukiwarka
Podobne podstrony:
Wykład11 całki, MATMA, matematyka, Matma, Matma, Nowe, Różności
MATEMATYKA mini, MATMA, matematyka, Matma, Matma, Nowe, Różności
Ka 380 da macierz kwadratowa, MATMA, matematyka, Matma, Matma, Nowe, Różności
Pytania na egzamin z matmy, MATMA, matematyka, Matma, Matma, Nowe
ALGORYTM MNOŻENIA PISEMNE GO(1), wykłady i notatki, dydaktyka matematyki, matematyka przedszkole i 1
zbiory, wykłady i notatki, dydaktyka matematyki, matematyka przedszkole i 1-3
19 12 nie ma wykładów ani ćw z matematyki
sprawdzzanie osiągnięć(1), wykłady i notatki, dydaktyka matematyki, matematyka przedszkole i 1-3
Wyklad25, Psychologia, biologia, Matematyka
Wyklad22, Psychologia, biologia, Matematyka
Wyklad14, Psychologia, biologia, Matematyka
Wyklad26, Psychologia, biologia, Matematyka
Wyklad18, Psychologia, biologia, Matematyka
Wyklad28, Psychologia, biologia, Matematyka
Wyklad23, Psychologia, biologia, Matematyka
Wyklad27, Psychologia, biologia, Matematyka
Wyklad11, Psychologia, biologia, Matematyka
więcej podobnych podstron