1. Model układu jak na rysunku zamieszczonym w podrozdziale 1.10 (część wkładowa) . Jak długo trwa proces zasprzęglania jeżeli Msp = 10Nm, zaś, Jb = 1kgm2 ? Przyjąć, że 
. Nierówność ta pozwala nie uwzględniać zmian prędkości kątowej części czynnych. Przyjąć także, że MC0 = Mb0 = 0.
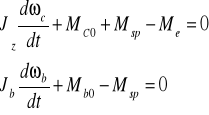
W rozwiązaniu zadania korzystam z równania 2, ze względu na nierówność 
.
Warunki początkowe: 

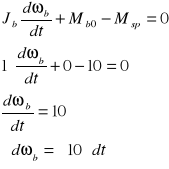
W danych jest podana prędkość obrotowa n = 100[obr/min]. Przeliczam tą wartość na prędkość kątową 
. Zmianę prędkości obrotowej na kątową opisuje wzór:
Moment pełnego zasprzęglenia zachodzi jeśli jest spełniony warunek 
Odp.: Przy warunkach zadania czas zasprzęglania wynosi t = 1,05 [s].
2. Dane zadania jak w zadaniu 1. Pytanie: Ile wynosi praca tarcia tracona podczas zasprzęglania?
Zakreskowane pole wykresu to praca tarcia.
Odp.: Praca tarcia tracona podczas zasprzęglania wynosi W = 5,51 [J].