Politechniki Wrocławskiej
LABORATORIUM AUTOMATYKI
Ćwiczenie nr: _______________
Temat: ______________________________________________
____________________________________________________
Badania i opracowanie wykonali:
1. ___________________________________
2. ___________________________________
3. ___________________________________
4. ___________________________________
Wydział: ____________________ Rok studiów: _______________
Data ćwiczenia: _______________ Prowadzący: _______________
Data oddania spraw.: ______________ Ocena: _______________
Poprawa: ______________________________________________
|
Zadania do wykonania:
Podpis prowadzącego |
1. Cel ćwiczenia:
Zapoznanie się z działaniem jest częścią pakietu numerycznego MATLAB - programem Simulink. Konstruowanie układów, tworzenie wykresu odpowiedzi skokowej oraz ich modyfikacja (zmiana wartości, czasu przeprowadzania symulacji, koloru tła i linii w wykresie).
2. Wyniki
Rys. 1.1. Schemat układu modelowania nr 1
Rys. 1.2. Przebieg przejściowy układu nr 1
Rys. 2.1. Schemat układu członów proporcjonalnych w połączeniu równoległym(układ modelowania nr2)
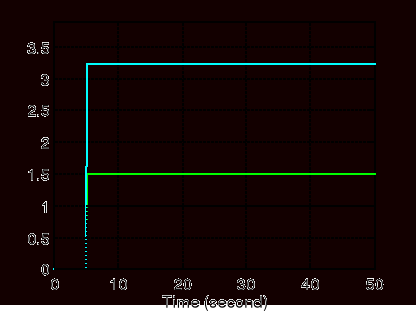
Rys. 2.2. Przebiegi przejściowe w układzie nr 2
Rys. 3.1. Schemat układu modelowania nr 3
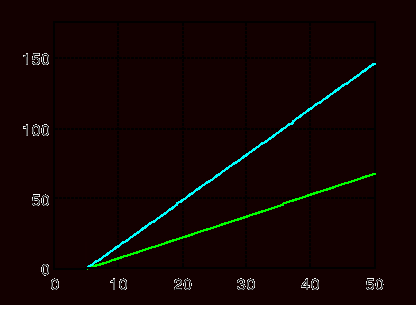
Rys. 3.2. Przebieg przejściowy układu nr 3
Rys. 4.1. Schemat układu modelowania nr 4
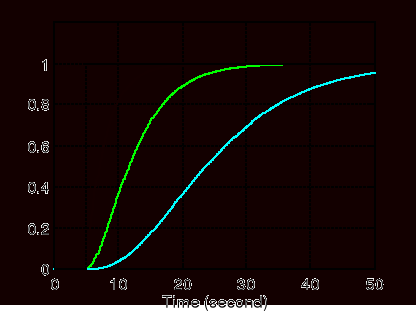
Rys. 4.2. Przebieg przejściowy układu nr 4
.
Rys. 5.1. Schemat układu modelowania nr 5
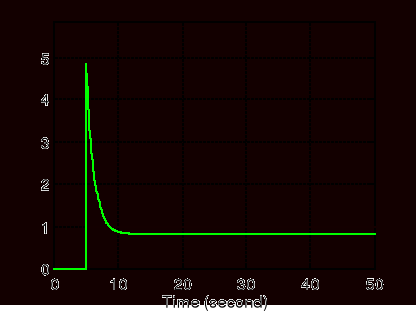
Rys. 5.2. Przebieg przejściowy układu nr 5
Rys. 6.1. Schemat układu regulatora proporcjonalno-całkującego(układ modelowy nr 6)
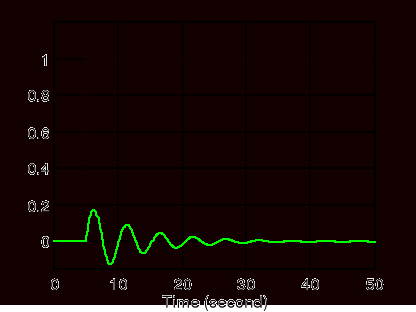
Rys. 6.2. Przebiegi przejściowe w układzie nr 6
Rys. 7.1. Schemat układu modelowania nr 7
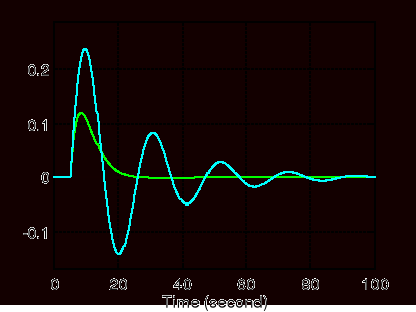
Rys. 7.2 Przebiegi przejściowe w układzie nr 7
3.Wnioski
W układzie nr 1 sygnał wyjściowy ma postać krzywej biegnącej do wartości zadanej.
W układzie nr 2 im większe wzmocnienie w członie proporcjonalnym to większa wartość sygnału wyjściowego.
W układzie nr 3 przebieg wartości dla idealnego członu różniczkującego jest równy 0, natomiast przebieg dla członów całkujących ma charakter liniowy.
W układzie nr 4 przebieg rośnie gwałtownie dla inercji pierwszego rzędu, a dla inercji trzeciego rzędu ma przebieg łagodny.
W układzie nr 5 sygnał gwałtowanie wzrasta do wartości wzmocnienia członu proporcjonalnego, następnie maleje do momentu stabilizacji.
W układzie nr 6 sygnał wyjściowy po przejściu przed regulator oscyluje gasnąco w granicach 0, następnie stabilizuje się.
W układzie nr 7 przy małych wartościach wzmocnienia członu proporcjonalnego występują oscylacje gasnące. Osiągają wartość zadaną, odchyłka zero. Im większe wzmocnienie, tym przebieg coraz bardziej przypomina liniowy.
Nr grupy:
Wyszukiwarka
Podobne podstrony:
automaty, PWr W9 Energetyka stopień inż, IV Semestr, Podstawy automatyki - laboratorium, Podsatwy au
wstępn ćw 1, PWr W9 Energetyka stopień inż, IV Semestr, Podstawy automatyki - laboratorium, Podsatwy
POŻAR (2), PWr W9 Energetyka stopień inż, IV Semestr, Podstawy automatyki - laboratorium
D3, PWr W9 Energetyka stopień inż, IV Semestr, Podstawy automatyki - laboratorium, Podsatwy automaty
siłowniki, PWr W9 Energetyka stopień inż, IV Semestr, Podstawy automatyki - laboratorium, Podsatwy a
zawór, PWr W9 Energetyka stopień inż, IV Semestr, Podstawy automatyki - laboratorium, Podsatwy autom
wstęp ćw 11, PWr W9 Energetyka stopień inż, IV Semestr, Podstawy automatyki - laboratorium, Podsatwy
D4-5, PWr W9 Energetyka stopień inż, IV Semestr, Podstawy automatyki - laboratorium, Podsatwy automa
strona tytułowa automaty, PWr W9 Energetyka stopień inż, IV Semestr, Podstawy automatyki - laborator
5A, PWr W9 Energetyka stopień inż, IV Semestr, Podstawy automatyki - laboratorium, Podsatwy automaty
6A, PWr W9 Energetyka stopień inż, IV Semestr, Podstawy automatyki - laboratorium, Podsatwy automaty
automaty, PWr W9 Energetyka stopień inż, IV Semestr, Podstawy automatyki - laboratorium, Podsatwy au
08 Dysze i dyfuzory, PWr W9 Energetyka stopień inż, IV Semestr, Maszyny przepływowe
N12, PWr W9 Energetyka stopień inż, IV Semestr, sprawka, płyny, laborki
stopień turbiny, PWr W9 Energetyka stopień inż, IV Semestr, Maszyny przepływowe, WIEWIORA PROJEKT
MIUE koło 0 gr2, PWr W9 Energetyka stopień inż, IV Semestr, sprawka, maszyny i urz elektr, maszyny,
zadania na egzamin, PWr W9 Energetyka stopień inż, III Semestr, Podstawy automatyki
więcej podobnych podstron