PAŃSTWOWA WYŻSZA SZKOŁA ZAWODOWA
W PILE
SPRAWOZDANIE Z LABORATORIUM
Ćwiczenie nr 3 :Przekładnia transformatora
Data wykonania:
Wykonali:
1.Podstawowe zagadnienia, pojęcia ,definicje:
Strumień indukcji magnetycznej - jest równy iloczynowi skalarnemu wektora indukcji magnetycznej i wektora powierzchni (ma wartość równą polu powierzchni, natomiast kierunek prostopadły do tej powierzchni. F=B®*s® , F=Bs cosa )
Zjawisko powstawania prądu w obwodzie przez który przechodzi zmienny strumień indukcji magnetycznej nazywamy indukcją elektromagnetyczną. Powstający w wyniku tego zjawiska prąd nazywamy prądem indukcyjnym. Strumień indukcji magnetycznej możemy zmienić: a) zmieniając B b) zmieniając s c) zmieniając kąt między B i s (np. obracając ramkę w polu magnetycznym). Kierunek prądu indukcyjnego określa reguła Lenza. Prąd indukcyjny płynie zawsze w takim kierunku aby jego własne pole magnetyczne przeciwstawiało się zmianom strumienia magnetycznego, dzięki którym powstał. Kierunek ten możemy wyznaczyć za pomocą reguły lewej dłoni.
Napięcie, które powstaje w obwodzie, w którym płynie prąd indukcyjny nazywamy siłą elektromotoryczną indukcji i oznaczamy SEM. SEM=- ΔF/ Δt = Bvl . Siła elektromotoryczna jest równa szybkości zmian strumienia indukcji magnetycznej w czasie. Mierzy się ją w watach. Jeżeli w obwodzie płynie zmienny prąd elektryczny to wytwarza on swoje własne zmienne pole magnetyczne. To zmienne pole magnetyczne jest źródłem dodatkowej siły elektrodynamicznej zwanej siłą elektromotoryczną samoindukcji lub indukcji własnej. IW dodaje się do napięcia obwodu jeżeli natężenie prądu maleje, zaś odejmuje gdy natężenie prądu rośnie.
Siła elektromotoryczna samoindukcji jest proporcjonalna do szybkości zmiany natężenia prądu w obwodzie L - współczynnik proporcjonalności nazwany współczynnikiem indukcji własnej obwodu, zależy od samego obwodu , jest charakterystyczny dla danego obwodu. [L] = 1H (henr).
Szczególne znaczenie w obwodach elektrycznych ma współczynnik samoindukcji indukcyjnych zwojnic
L=SN2μ/l
Siła elektromotoryczna jest proporcjonalna do liczby zwojnic. Transformator - stanowi układ 2 cewek sprzężonych ze soba magnetycznie, gdzie jedna z cewek pobiera energię ze źródła prądu sinusoidalnego (strona pierwotna) i przekazuje drugiej (stronie wtórnej) poprzez pole elektromagnetyczne wytworzone w wyniku przepływu prądu przez cewkę po stronie pierwotnej. Straty poniesione w wyniku przekazywania energii są znikome i nie przekraczają normalnie 2%, w obliczeniach teoretycznych często przyjmuje się, że moc wejściowa jest równa wyjściowej. Do strat należy zaliczyć: straty cieplne, straty na powstanie prądów wirowych, straty na powstawanie pola elektromagnetycznego w uzwojeniach i poza nimi oraz prąd jałowy uzwojenia pierwotnego. Transformator może pracować w jednym z trzech stanów pracy, w stanie jałowym, stanie obciążenia i stanie zwarcia. Cewki te są sprzężone co oznacza, że nie zostaje bez znaczenia dla strony pierwotnej uzwojenia to co dzieje się po stronie wtórnej i dlatego zależnie od poboru mocy ze strony wtórnej transformatora kształtuje się pobór mocy po stronie pierwotnej.
W związku z tym nasuwa się pytanie po co stosować transformatory, skoro moc pobrana przez transformator jest prawie równa mocy oddawanej, a dodatkowo montujemy w układzie element dużej wielkości dający ciepło i pole elektromagnetyczne? Odpowiedź na to pytanie daje nam jeszcze jedna własność transformatora. Jest nią możność transformowania konkretnej wartości napięcia lub prądu zmiennego (lub przemiennego) na inną jego wartość napięcia lub prądu. Odzwierciedleniem tej własności jest z - czyli przekładnia transformatora.
n2>n1=>u2>u1=>p>1 - taki transformator podnosi napięcie
n2u2p<1 - taki transformator obniża napięcie
N1 - liczba zwojów w cewce pierwotnej, N2 - liczba zwojów w cewce wtórnej
![]()
oraz
![]()
Stosunek napięć
![]()
Widać, że regulując ilość zwojów w cewkach możemy zamieniać małe napięcia na duże i odwrotnie.
Zjawisko przemiany napięcia znajduje swoje zastosowanie w energetyce, gdzie często trzeba zwiększać napięcie, na liniach przesyłowych, a potem je obniżać, np. w celu dostosowania napięcia do 220V~. Zastosowanie można znaleźć też w akustyce, gdzie w bardzo nieskomplikowany sposób można wzmocnić sygnał dźwiękowy z mikrofonu, aby można było podać sygnał do właściwego wzmacniacza.
Symbol transformatora powietrznego:
Symbol transformatora z rdzeniem ferromagnetycznym:
2.Pomiar dla Z1=900 i Z2=200 : Z=4.5
U1 |
U2 |
Z |
( Z-Zśr.) |
(Z-Zśr)2 |
0,60 |
0,11 |
5,45 |
0,32 |
0,102 |
0,75 |
0,14 |
5,36 |
0,23 |
0,053 |
1,00 |
0,19 |
5,26 |
0,13 |
0,017 |
2,20 |
0,43 |
5,12 |
-0,01 |
0,000 |
3,00 |
0,59 |
5,08 |
-0,05 |
0,003 |
3,50 |
0,69 |
5,07 |
-0,06 |
0,004 |
4,00 |
0,79 |
5,06 |
-0,07 |
0,005 |
4,70 |
0,93 |
5,05 |
-0,08 |
0,006 |
5,30 |
1,06 |
5,00 |
-0,13 |
0,017 |
6,80 |
1,41 |
4,82 |
-0,31 |
0,096 |
|
5,13 |
|
0,030 |
|
![]()
![]()
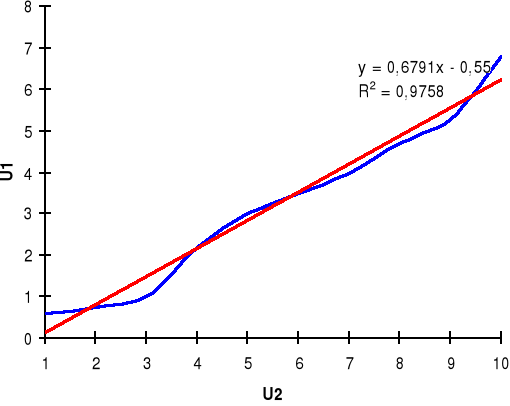
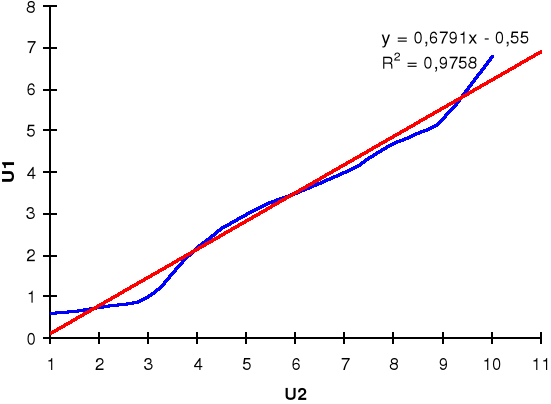
3.Pomiar dla Z1=1600 i Z2=200 : Z=8
U1 |
U2 |
Z |
(Z-Zśr.) |
(Z-Zśr)2 |
0,60 |
0,06 |
10,00 |
0,81 |
0,656 |
0,75 |
0,08 |
9,38 |
0,19 |
0,036 |
1,00 |
0,10 |
10,00 |
0,81 |
0,656 |
2,20 |
0,24 |
9,17 |
-0,02 |
0,000 |
3,00 |
0,33 |
9,09 |
-0,10 |
0,010 |
3,50 |
0,39 |
8,97 |
-0,22 |
0,048 |
4,00 |
0,45 |
8,89 |
-0,30 |
0,090 |
4,70 |
0,53 |
8,87 |
-0,32 |
0,102 |
5,30 |
0,60 |
8,83 |
-0,36 |
0,130 |
6,80 |
0,78 |
8,72 |
-0,47 |
0,221 |
|
9,19 |
|
0,195 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
4.Pomiar dla Z1=1600 i Z2=900 zwojów: Z=1.78
U1 |
U2 |
Z |
(Z-Zśr.) |
(Z-Zśr)2 |
0,60 |
0,30 |
2,00 |
0,06 |
0,004 |
0,75 |
0,37 |
2,03 |
0,09 |
0,008 |
1,00 |
0,50 |
2,00 |
0,06 |
0,004 |
2,20 |
1,15 |
1,91 |
-0,03 |
0,001 |
3,00 |
1,58 |
1,90 |
-0,04 |
0,002 |
3,50 |
1,85 |
1,89 |
-0,05 |
0,003 |
4,00 |
2,13 |
1,88 |
-0,06 |
0,004 |
4,70 |
2,50 |
1,88 |
-0,06 |
0,004 |
5,30 |
2,72 |
1,95 |
0,01 |
0,000 |
6,80 |
3,53 |
1,93 |
-0,01 |
0,000 |
|
1,94 |
|
0,003 |
|
|
|
|
|
|
|
|
|||
![]()
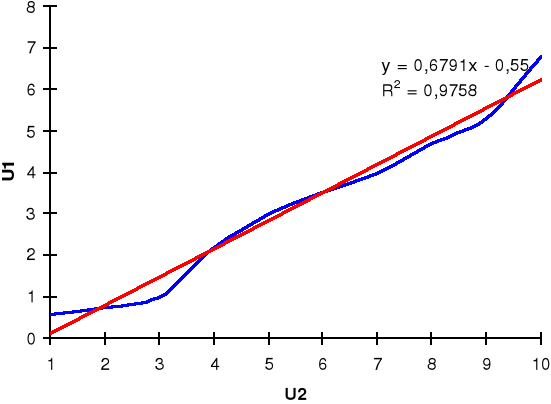
5. Ostatnią formą pomiaru przekładni (oprócz liczby zwojów i ilorazu napięć) jest obliczenie jej z następującej zależności :
![]()
gdzie :
α - kąt między linią trendu a osią X (u nas ok. 33o-34o)
a= 0,6791
czyli:
tg 34o= 0,6745
Wartość wyliczona kąta daje wielkość porównywalną
z parametrem „a” z funkcji regresji y=0,6791x-0,55 co świadczy o tym ,że wartości wyliczone są prawidłowo.
6.Wnioski:
Rozbieżność pomiędzy wielkością przekładni wyliczoną z liczby zwojów a przekładnią wyliczoną z napięć wynika z kilku przyczyn:
- przekładnia z liczby zwojów jest wielkością wyidealizowaną tzn. nie obarczoną żadnym błędem ,jest to wielkość czysto teoretyczna.
- przekładnia obliczona z napięć nieznacznie odbiega od teoretycznej a wynika to z :
oporów wewnętrznych transformatora
zakłóceń związanych z brakiem skutecznego chłodzenia
zakłóceń sieci energetycznej
zakłóceń na stykach łączących zasilacz, transformator oraz przyrządy pomiarowe
błędu pomiarowego
braku ustalenia wyniku pomiaru (tzn. wyświetlacz woltomierza przeskakiwał pomiędzy kilkoma wartościami np. 1,41V a 1,48V ;niewielka wydawałoby się różnica 0,07V zmieniała liczbę „Z” z 4,82 na 4,59 przy wartości teoretycznej Z=4,5 - niewielka różnica napięć ale duże zbliżenie do prawidłowego wyniku)
Zagadką pozostają dla nas identyczne wykresy zależności U1/U2 (wykonane przy pomocy programu Excel) .
Mimo różnych wartości napięć U2 otrzymaliśmy taki sam przebieg wykresu oraz takie same wartości regresji liniowej oraz korelacji. Wartości parametru r (korelacji) obliczone za pomocą kalkulatora różniły się niewiele od tych z wykresu ale jednak były pewne różnice pomiędzy poszczególnymi zestawieniami pomiarów. Podejrzewamy ,że Excel jest programem niezbyt precyzyjnym dla naszych potrzeb.
Pomimo wyżej opisanych trudności przebieg doświadczenia uważamy za udany a uzyskane wyniki za prawidłowe.
1
Wyszukiwarka