Katedra Maszyn Elektrycznych |
||||
Maszyny elektryczne specjalne |
||||
Ćwiczenie nr :
7 |
Temat ćwiczenia:
Silnik skokowy sterowany komputerem |
Imię i nazwisko:
|
||
Data wykonania ćwiczenia |
Data oddania sprawozdania |
Ocena i data |
Podpis sprawdzającego |
Grupa, zespół laboratoryjny |
17.01.2014 |
24.01.2014 |
|
|
3ED11B, II |
1. Wstęp teoretyczny:
Silnik przetwarza sygnały sterujące na ustalone położenia kątowe wału bezpośrednio, bez konieczności stosowania jakichkolwiek sprzężeń zwrotnych. Impulsy sterujące powodują, że uzwojenia silnika zostają zasilone za pośrednictwem komutatora elektronicznego odpowiednim układem napięć utrzymywanych na nich do czasu pojawienia się następnych impulsów wynikających z kolejnego taktu komutacji. Kątowe przemieszczenie wirnika o określoną wartość nazywa się skokiem (krokiem).Mianem silników skokowych określa się silniki prądu przemiennego. Silnik skokowy ma na stojanie jedno, dwa lub cztery (czasem więcej) uzwojenia sterujące, przesunięte względem siebie w przestrzeni. W zależności od rodzaju wirnika, silniki skokowe dzielą się na silniki z wirnikiem biernym i silniki z wirnikiem czynnym. Silnik z wirnikiem czynnym ma na wirniku uzwojenie wzbudzenia zasilane prądem stałym lub magnesy trwałe. Wirnik bierny jest uzębiony, lecz nie posiada żadnego uzwojenia. Na rysunku przedstawiono poglądowo budowę silnika z wirnikiem czynnym i biernym.
2. Cel ćwiczenia
Celem ćwiczenia jest poznanie zasady działania czteropasmowego silnika skokowego sterowanego komputerem przy pracy półokresowej, ćwierćokresowej i miniskokowej.
3. Schemat pomiarowy
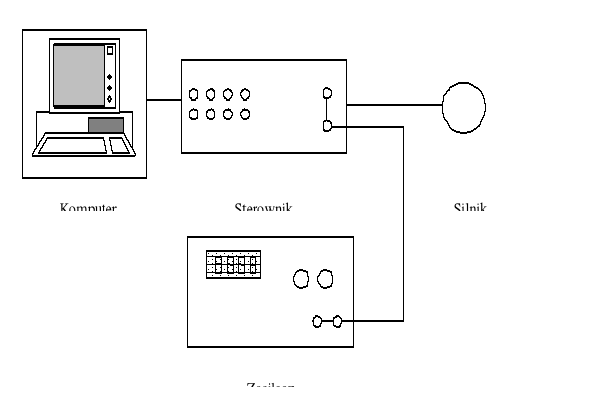
Schemat podłączenia silnika skokowego
F1 F2
r
Układ do obciążenia silnika skokowego
4. Tabele pomiarowe :
Rozkład impulsów sterujących:
Program: |
U1 |
U2 |
U3 |
U4 |
Ćwierćokresowa |
29 |
0 |
0 |
0 |
2 skok |
0 |
28,5 |
0 |
0 |
3 skok |
0 |
0 |
28 |
0 |
4 skok |
0 |
0 |
0 |
28 |
5 skok |
29 |
0 |
0 |
0 |
6 skok |
0 |
28,5 |
0 |
0 |
7 skok |
0 |
0 |
28 |
0 |
Praca PÓŁOKRESOWA |
0 |
29 |
28,5 |
0 |
2 skok |
0 |
0 |
28 |
28 |
3 skok |
28,5 |
0 |
0 |
28 |
4 skok |
29 |
29 |
0 |
0 |
5 skok |
0 |
29 |
28 |
0 |
6 skok |
0 |
0 |
28 |
28 |
Praca MINISKOKOWA |
24,5 |
14 |
0 |
0 |
2 skok |
14 |
24,5 |
0 |
0 |
3 skok |
0 |
28,5 |
0 |
0 |
4 skok |
0 |
24,5 |
13,5 |
0 |
5 skok |
0 |
14 |
24 |
0 |
6 skok |
0 |
0 |
28 |
0 |
7 skok |
0 |
0 |
24 |
14 |
8 skok |
0 |
0 |
13,5 |
24 |
9 skok |
0 |
0 |
0 |
28 |
10 skok |
14 |
0 |
0 |
24,5 |
11 skok |
24,5 |
0 |
0 |
14 |
12 skok |
28,5 |
0 |
0 |
0 |
13 skok |
24,5 |
14 |
0 |
0 |
14 skok |
14 |
24,5 |
0 |
0 |
15 skok |
0 |
28,5 |
0 |
0 |
16 skok |
0 |
24,5 |
13,5 |
0 |
17 skok |
0 |
14,5 |
24 |
0 |
Wyniki pomiarów do wyznaczania charakterystyki granicznej:
5. Charakterystyki:
Charakterystyka częstotliwościowa graniczna silnika skokowego sterowanego komputerem.
r(promień)= 2,4 cm
Cylogramy:
6. Wnioski :
W trakcie wykonywania ćwiczenia korzystaliśmy ze specjalnego programu umożliwiającego nam sterowanie silnikiem skokowym przez komputer PC za pośrednictwem odpowiedniego sterownika. Program obsługujemy za pomocą klawiatury komputera zarówno numerycznej jak i alfabetycznej. Strzałkami góra/dół regulujemy częstotliwość pracy silnika. Za pomocą klawiszy alfabetycznych ustawiamy tryb pracy silnika. Liczbę skoków od 1 do 50 ustalamy za pomocą klawiatury numerycznej.
Przypisane klawisze:
O- praca półokresowa
C- praca ćwierćokresowa
M- praca miniskokowa
S- stop
B- bieg jałowy
U- luz
Enter- zatwierdzenie zmian skoków.
Za pomocą klawiszy P i L ustawiamy kolejna prawy i lewy kierunek obrotów silnika.
Silnik wypada z synchronizmu po osiągnięciu odpowiednio wysokiej częstotliwości pracy.
Około 300Hz- praca półokresowa, 250-300Hz- praca ćwierć-okresowa, 900-1000Hz- praca miniskowowa. Na podstawie przeprowadzonych pomiarów możemy stwierdzić, że pomiary impulsów sterujących możemy uznać za poprawne i zgodne z teoretycznymi ponieważ są powtarzalne w kolejnych cyklach (w dołączonym protokole są zanotowane pomiary dla kolejnych cyklów). Podczas zapoznawania się z obsługą programu i różnymi rodzajami pracy silnika skokowego zauważyliśmy, że przy mniejszej ilości skoków silnik jest dokładniejszy niż przy większej ilości skoków. Przy pracy miniskokowej wysoka liczba skoków powoduje dokładniejszą pracę (silnik wykonuje dużą ilość skoków podczas jednego obrotu). Z przeprowadzonych pomiarów wynika, że praca miniskokowa jest najwydajniesza, ponieważ jest najbardziej dokładna. Natomiast praca półokresowa nadaje się bardziej do pomiarów zależących od długości skoku. Zastosowanie silników skokowych pozwala na znaczne uproszczenie konstrukcji mechanicznej urządzenia i przeniesienie znaczącej części odpowiedzialności za poprawność pozycjonowania na układy elektroniczne i oprogramowanie, a te jeżeli już raz zaczęły działać dobrze, to z reguły działają dobrze przez dłuższy czas. Znajdują one swoje miejsce w układach pomiarowych, rejestrujących i różnego rodzaju sterownikach.
wzrostem częstotliwości przy pracy miniskokowej wzrastają obroty silnika.
Lp |
Praca ćwierćokresowa |
Praca półokresowa |
Praca miniskokowa |
||||||||||
|
f |
F1 |
F2 |
∆F |
M |
F1 |
F2 |
∆F |
M |
F1 |
F2 |
∆F |
M |
|
Hz |
N |
N |
N |
Ncm |
N |
N |
N |
Ncm |
N |
N |
N |
Ncm |
1 |
50 |
3 |
5,5 |
2,5 |
6 |
2,2 |
5,5 |
3 |
7,2 |
3 |
5 |
2 |
4,8 |
2 |
100 |
2 |
4,5 |
2,5 |
6 |
2,3 |
5,5 |
3,2 |
7,7 |
3 |
4 |
1 |
2,4 |
3 |
150 |
1,5 |
4 |
2,5 |
6 |
2 |
4,7 |
2,7 |
6,5 |
2,5 |
3,5 |
1 |
2,4 |
4 |
200 |
1,2 |
3 |
1,8 |
4,3 |
1,5 |
4 |
2,5 |
6 |
2,5 |
5 |
2,5 |
6 |
5 |
250 |
1 |
2,2 |
1,2 |
2,9 |
1,5 |
3 |
1,5 |
3,6 |
2,6 |
5,5 |
2,9 |
7 |
6 |
300 |
0,7 |
1,7 |
1 |
2,4 |
0 |
0 |
0 |
0 |
2,4 |
5 |
2,6 |
6,2 |
7 |
350 |
|
|
|
|
|
|
|
|
2,4 |
5 |
2,6 |
6,4 |
8 |
400 |
|
|
|
|
|
|
|
|
2,2 |
4,5 |
2,3 |
5,5 |
9 |
450 |
|
|
|
|
|
|
|
|
2 |
4,5 |
2,5 |
6 |
10 |
500 |
|
|
|
|
|
|
|
|
2 |
4,2 |
2,2 |
5,3 |
11 |
550 |
|
|
|
|
|
|
|
|
1,6 |
1,9 |
0,3 |
0,7 |
12 |
600 |
|
|
|
|
|
|
|
|
3,8 |
4 |
0,2 |
0,5 |
13 |
650 |
|
|
|
|
|
|
|
|
1,9 |
1,5 |
0,4 |
1 |
14 |
700 |
|
|
|
|
|
|
|
|
4 |
3,5 |
0,5 |
1,2 |
15 |
750 |
|
|
|
|
|
|
|
|
1,8 |
3,3 |
1,5 |
2,9 |
Wyszukiwarka