TEORIA I TECHNIKA SYSTEMÓW
TWORZENIE MODELI I MODELOWANIE
IDENTYFIKACJA I ROZPOZNAWANIE
ANALIZA I PROJEKTOWANIE
STEROWANIE I KIEROWANIE
DR INŻ. ANDRZEJ ŻOŁNIEREK P.111, C-3
POJĘCIE SYSTEMU
IDEA WYODRĘBNIENIA SYSTEMU Z OTOCZENIA
IDEA BUDOWY SYSTEMU Z ELEMENTÓW ( PODSYSTEMÓW )
IDEA FUNKCJI SPEŁNIANEJ PRZEZ SYSTEM
IDEA OGRANICZONEJ ZMIENNOŚCI SYSTEMU W CZASIE
SYSTEM JEST PEWNĄ CAŁOŚCIĄ, W KTÓREJ WSPÓŁDZIAŁAJĄ WYODRĘBNIONE CZĘŚCI SKŁADOWE. FUNKCJONOWANIE SYSTEMU ZALEŻY OD FUNKCJI CZĘŚCI SKŁADOWYCH I ZWIĄZKÓW MIĘDZY NIMI. POWIĄZANIA CZĘŚCI SKŁADOWYCH
OKREŚLAJĄ STRUKTURĘ SYSTEMU.
CELE BUDOWY MODELU SYSTEMU
OPIS I WYJAŚNIENIE DZIAŁANIA MECHANIZMU SYSTEMU - MODEL FENOMENOLOGICZNY
PRZEWIDYWANIE ZACHOWANIA SIĘ SYSTEMU W PRZYSZŁOŚCI I PRZY RÓŻNYCH
WARUNKACH ODDZIAŁYWANIA NA SYSTEM - MODEL PROGNOSTYCZNY
WYBÓR WŁAŚCIWYCH ODDZIAŁYWAŃ WEJŚCIOWYCH SPEŁNIAJĄCYCH OKREŚLONE WARUNKI - MODEL DECYZYJNY ( W SZCZEGÓLNOŚCI WYBÓR OPTYMALNY)
WYBÓR STRUKTURY LUB PARAMETRÓW SYSTEMU , SPEŁNIAJĄCEGO OKREŚLONE ZADANIA - MODEL NORMATYWNY
ETAPY MODELOWANIA MATEMATYCZNEGO
SFORMUŁOWANIE CELÓW MODELOWANIA
WYBÓR KATEGORII MODELU I OKREŚLENIE JEGO STRUKTURY
IDENTYFIKACJA
ALGORYTMIZACJA OBLICZEŃ
WERYFIKACJA
MODELEM MATEMATYCZNYM SYSTEMU (OBIEKTU, PROCESU) JEST ZESTAW WZORÓW MATEMATYCZNYCH (OGÓLNIE ZESTAW RELACJI MATEMATYCZNO-LOGICZNYCH) OKREŚLAJĄCYCH ZALEŻNOŚCI POMIĘDZY WYRÓŻNIONYMI WIELKOŚCIAMI.
SĄ TO WIELKOŚCI WEJŚCIOWE I WYJŚCIOWE SYSTEMU, A SYSTEM TAKI NAZYWAMY
WZGLĘDNIE ODOSOBNIONYM.
W POJĘCIACH WEJŚCIE I WYJŚĆIE ZAWARTE JEST DOMNIEMANIE O ZWIĄZKU
PRZYCZYNOWO-SKUTKOWYM MIĘDZY TYMI WIELKOŚCIAMI, W TYM SENSIE , ŻE ZNAJĄC (OBSERWUJĄC) WEJŚCIE MOŻNA OKREŚLIĆ JAKIE BĘDZIE WYJŚCIE
WERYFIKACJA MODELU JEST TO PORÓWNANIE WYNIKÓW MODELOWANIA Z ZACHOWANIEM SIĘ SYSTEMU RZECZYWISTEGO Z PUNKTU WIDZENIA ZGODNOŚCI Z WIEDZĄ TEORETYCZNĄ ORAZ BADANIAMI EMPIRYCZNYMI
KRYTERIA WEWNĘTRZNE :
-ZGODNOŚĆ FORMALNA
-ZGODNOŚĆ ALGORYTMICZNA
KRYTERIA ZEWNĘTRZNE :
-ZGODNOŚĆ HEURYSTYCZNA
-ZGODNOŚĆ PRAGMATYCZNA
1.ZGODNŚĆ REPLIKATYWNA
2.ZGODNOŚĆ PREDYKATYWNA
3.ZGODNŚĆ STRUKTURALNA
DYNAMIKA SYSTEMÓW
SYSTEMY STATYCZNE
SYSTEMY DYNAMICZNE
WŁASNOŚCI DYNAMICZNE SYSTEMÓW WYNIKAJĄ Z DZIAŁANIA NASTĘPUJĄCYCH OGÓLNYCH ZASAD F I Z Y C Z N Y C H :
PRZY OGRANICZONYCH WYDAJNOŚCIACH ŹRÓDEŁ , KAŻDA NIE NIESKOŃCZENIE MAŁA ZMIANA STANU ENERGETYCZNEGO LUB MATERIAŁOWEGO WYMAGA PEWNEGO CZASU (BEZWŁADNOŚĆ=INERCJA)
KAŻDE SKOŃCZONE PRZEMIESZCZENIE SIĘ W PRZESTRZENI ZJAWISKA MATERIALNEGO WYMAGA PEWNEGO CZASU (OPÓŹNIENIE)
STAN SYSTEMU DYNAMICZNEGO
JEST TO NAJMNIEJSZA LICZBA DANYCH (WEKTOR STANU) , KTÓRYCH ZNAJOMOŚĆ W DANEJ CHWILI, PRZY ZNAJOMOŚCI WIELKOŚCI WEJŚCIOWYCH , POCZĄWSZY OD TEJ CHWILI - POZWALA JEDNOZNACZNIE OKREŚLIĆ STAN I WIELKOŚCI WYJŚCIOWE SYSTEMU W PRZYSZŁOŚCI.
WIELKOŚCI STANU SĄ WIĘC ZMIENNYMI WEWNĘTRZNYMI SYSTEMU, KTÓRE REASUMUJĄ W SOBIE CAŁĄ PRZESZŁOŚĆ I DETERMINUJĄ JEGO PRZYSZŁOŚĆ.
ZDETERMINOWANIE SYSTEMU WYNIKA Z POSTULATÓW :
PRZYCZYNOWOŚĆ
ZUPEŁNOŚĆ
UKŁADEM STEROWANIA NAZYWAMY ZESPÓŁ ZŁOŻONY Z OBIEKTU STEROWANIA I URZĄDZENIA STERUJĄCEGO - ODPOWIEDNIO POWIĄZANYCH FUKCJONALNIE ZE SOBĄ.
W OBIEKCIE STEROWANIA WYRÓŻNIAMY :
SYGNAŁY WEJŚCIOWE (STERUJĄCE)
SYGNAŁY ZAKŁÓCAJĄCE
SYGNAŁY WYJŚCIOWE
SYGNAŁY, NAWET WTEDY, KIEDY SĄ WIELKOŚCIAMI FIZYKALNYMI LUB FIZYKALNIE WYOBRAŻALNYMI, NIE ZAWSZE MOŻNA W DANYM OBIEKCIE WYZNACZYĆ I NIE ZAWSZE MOŻNA ODDZIAŁYWAĆ NA NIE ZA POMOCĄ ROZPORZĄDZALNYCH SYGNAŁÓW STERUJĄCYCH.
SYGNAŁY MOGĄ BYĆ:
-MIERZALNE I STEROWALNE
-MIERZALNE I NIESTEROWALNE
-STEROWALNE I NIEMIERZALNE
-NIEMIERZALNE I NIESTEROWALNE.
MODEL MATEMATYCZNY TWORZYMY
NA PODSTAWIE PEŁNEJ ZNAJOMOŚCI ZJAWISK W POSZCZEGÓLNYCH OBIEKTACH ORAZ ICH POWIĄZAŃ MIĘDZY SOBĄ I Z URZĄDZENIAMI STERUJĄCYMI USTALA SIĘ ZALEŻNOŚCI MIĘDZY SYGNAŁAMI WYSTĘPUJĄCYMI W UKŁADZIE.
NA PODSTAWIE CZĘŚCIOWEJ ZNAJOMOŚCI ZJAWISK W SKŁADOWYCH OBIEKTACH I STRUKTURY UKŁADU FORMUŁUJE SIĘ WSTĘPNIE ZWIĄZKI MIĘDZY SYGNAŁAMI. NASTĘPNIE KORYGUJE SIĘ TE ZALEŻNOŚCI NA PODSTAWIE WYNIKÓW UZYSKANYCH EKSPERYMENTALNIE.
W PRZYPADKU NIEPEŁNEJ INFORMACJI A PRIORI O UKŁADZIE LUB BRAKU TEJ INFORMACJI OTRZYMUJE SIĘ DOŚWIADCZALNIE OKREŚLONE DANE I PO ODPOWIEDNIM ICH PRZETWORZENIU TWORZY MODEL MATEMATYCZNY
I D E N T Y F I K A C J A
OZNACZA WYZNACZENIE MODELU SYSTEMU NA PODSTAWIE BADAŃ EKSPERYMENTALNYCH. JEST TO OBSZERNY DZIAŁ TEORII I TECHNIKI SYSTEMÓW OBEJMUJĄCY RÓŻNE PROBLEMY, METODY I TECHNIKI DLA RÓŻNYCH PRZYPADKÓW SYSTEMÓW I ICH MODELI.
EFEKTEM KOŃCOWYM JEST A L G O R Y T M I D E N T Y F I K A C J I.
A NA L I Z A
ANALIZA ILOŚCIOWA
ANALIZA JAKOŚCIOWA
P R O J E K T O W A N I E (SYNTEZA) MOŻE TO BYĆ PODEJMOWANIE DECYZJI
PRZY ZMIENNYCH ZAKŁÓCENIACH MAMY DO CZYNIENIA ZE S T E R O W A N I E M.
BIEŻĄCE ZMIANY PROJEKTU SPOWODOWANE ZMIANAMI ZAKŁÓCEŃ I POLEGAJĄCE NA WYZNACZANIU ORAZ REALIZACJI UAKTUALNIANYCH DECYZJI NAZYWAMY STEROWANIEM.
W TEN SPOSÓB SYSTEM STERUJĄCY ODDZIAŁYWUJE NA OBIEKT STEROWANIA W OKREŚLONYM CELU, KTÓRYM JEST DOPROWADZENIE WYJŚCIA DO WARTOŚCI ZADANEJ LUB EKSTREMALNEJ ORAZ UTRZYMYWANIE OBIEKTU MOŻLIWIE BLISKO TYCH WARTOŚCI MIMO DZIAŁAJĄCYCH ZAKŁÓCEŃ.
PRZEPIS FORMALNY TO A L G O R Y T M S T E R O W A N I A.
KLASYFIKACJA UKŁADÓW STEROWANIA:
NA PODSTAWIE WŁASNOŚCI
UKŁADY CIĄGŁE I DYSKRETNE
UKŁADY LINIOWE I NIELINIOWE
UKŁADY STACJONARNE I NIESTACJONARNE
UKŁADY JEDNO I WIELOWYMIAROWE
UKŁADY O STAŁYCH SKUPIONYCH I O PARAMETRACH ROZŁOŻONYCH
ZE WZGLĘDU NA ZADANIA
UKŁADY AUTOMATYCZNEJ STABILIZAJI (REGULACJI STAŁOWARTOŚCIOWEJ)
UKŁADY REGULACJI PROGRAMOWEJ
UKŁADY NADĄŻNE (ŚLEDZĄCE)
ZE WZGLĘDU NA RODZAJ PROCESÓW PODLEGAJĄCYCH STEROWANIU
UKŁADY STEROWANIA PROCESÓW JEDNOSTKOWYCH
UKŁADY STEROWANIA KOMPLEKSOWEGO
ZE WZGLĘDU NA SPOSÓB REALIZACJI STEROWANIA I MOŻLIWOŚCI DOSTOSOWANIA SIĘ UKŁADÓW DO ZMIENIAJĄCYCH SIĘ WARUNKÓW PRACY
UKŁADY ZWYKŁE (NIEADAPTACYJNE)
UKŁADY ADAPTACYJNE
UKŁADY OPTYMALNE
UKŁADY NIEOPTYMALNE
METODY OPISU CIĄGŁYCH LINIOWYCH JEDNOWYMIAROWYCH OBIEKTÓW STEROWANIA
RÓWNANIA RÓŻNICZKOWE OPISUJĄCE JEDNOWYMIAROWE OBIEKTY STEROWANIA ( W SZCZEGÓLNOŚCI RÓWNANIE WE-WY)
ODPOWIEDŹ JEDNOSTKOWA (SKOKOWA)
ODPOWIEDŹ IMPULSOWA
TRANSMITANCJA OPERATOROWA
TRANSMITANCJA WIDMOWA
METODA PRZESTRZENI FAZOWEJ I PŁASZCZYZNY FAZOWEJ
METODA ZMIENNYCH STANU
CHARAKTERYSTYKI CZĘSTOTLIWOŚCIOWE
CHARAKTERYSTYKI CZĘSTOTLIWOŚCIOWE:
CHARAKTERYSTYKA AMPLITUDOWO-FAZOWA
CHARAKTERYSTYKA AMPLITUDOWA
CHARAKTERYSTYKA FAZOWA
CHARAKTERYSTYKA SKŁADOWEJ RZECZYWISTEJ TRANSMITANCJI
CHARAKTERYSTYKA SKŁADOWEJ UROJONEJ TRANSMITANCJI
CHRAKTERYSTYKA LOGARYTMICZNA AMPLITUDOWA
CHARAKTERYSTYKA LOGARYTMICZNA FAZOWA
TYPOWE CZŁONY LINIOWE
CZŁON PROPORCJONALNY
CZŁON INERCYJNY PIERWSZEGO RZĘDU
CZŁON CAŁKUJĄCY IDELNY
CZŁON CAŁKUJĄCY Z INERCJĄ
CZŁON RÓŻNICZKUJĄCY Z INERCJĄ
CZŁON OSCYLACYJNY
CZŁON INERCYJNY DRUGIEGO RZĘDU
CZŁON OPÓŹNIAJĄCY
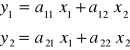
MODEL SYSTEMU PRODUKCYJNEGO (STATYCZNY)![]()
![]()
ilości surowców przerabianych w dwóch agregatach
![]()
ilość produktu i koszt produkcji
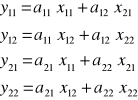
IDENTYFIKACJA
wyznaczenie ![]()
na podstawie układu czterech równań:
ANALIZA ILOŚCIOWA
jeżeli znamy wartości liczbowe parametrów ![]()
to
wstawiamy dane ![]()
do modelu i wyliczamy ![]()
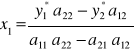
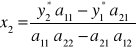
PROJEKTOWANIE - PODEJMOWANIE DECYZJI
dla danych wartości a oraz zadanych wartości ![]()
, ![]()
można wyliczyć decyzje ![]()
C h a r a k t e r y s t k ą ( o d p o w i e d z i ą ) s k o k o w ą
h(t) jednowymiarowego układu ( obiektu ) liniowego stacjonarnego nazywać będziemy odpowiedź tego układu na wymuszenie w postaci jednostkowej funkcji skokowej 1( t ) , przy zerowych warunkach początkowych.
C h a r a k t e r y s t k ą ( o d p o w i e d z i ą ) impulsową
g(t) jednowymiarowego układu ( obiektu ) liniowego stacjonarnego nazywać będziemy odpowiedź tego układu na wymuszenie w postaci funkcji Diraca ( t ) , przy zerowych warunkach początkowych.
T r a n s m i t a n c j ą o p e r a t o r o w ą
G( s ) jednowymiarowego układu ( obiektu ) liniowego stacjonarnego nazywać będziemy wielkość określoną jako stosunek transformaty odpowiedzi Y( s ) do transformaty wymuszenia U( s ) tego układu przy zerowych warunkach początkowych
G ( s ) = Y ( s ) / U ( s )
CZŁON INERCYJNY
Równanie różniczkowe wejście-wyjście:
![]()
k- współczynnik wzmocnienia określony jako stosunek odpowiedzi y do wymuszenia u w stanie ustalonym,
T- stała czasowa.
Charakterystyka skokowa:
![]()
Odpowiedź impulsowa:
![]()
Transmitancja:
![]()
CZŁON BEZINERCYJNY (proporcjonalny, wzmacniający)
Równanie różniczkowe wejście-wyjście:
![]()
k- współczynnik wzmocnienia określony jako stosunek odpowiedzi y do wymuszenia u w stanie ustalonym,
T- stała czasowa = 0.
Charakterystyka skokowa:
![]()
Odpowiedź impulsowa:
![]()
Transmitancja:
![]()
CZŁON CAŁKUJĄCY Z INERCJĄ
Równanie różniczkowe wejście-wyjście:
![]()
k- współczynnik wzmocnienia prędkościowego określony jako stosunek pochodnej odpowiedzi y do wymuszenia u w stanie ustalonym,
T- stała czasowa.
Charakterystyka skokowa:
Odpowiedź impulsowa:
Transmitancja:
![]()
CZŁON CAŁKUJĄCY IDEALNY
Równanie różniczkowe wejście-wyjście:
![]()
k- współczynnik wzmocnienia prędkościowego określony jako stosunek pochodnej odpowiedzi y do wymuszenia u w stanie ustalonym,
T- stała czasowa = 0.
Charakterystyka skokowa:
![]()
Odpowiedź impulsowa:
![]()
Transmitancja:
![]()
CZŁON RÓŻNICZKUJĄCY Z INERCJĄ (rzeczywisty człon różniczkujący)
Równanie różniczkowe wejście-wyjście:
![]()
k- współczynnik wzmocnienia określony jako stosunek odpowiedzi y do pochodnej wymuszenia u w stanie ustalonym,
T- stała czasowa.
Charakterystyka skokowa:
![]()
Odpowiedź impulsowa:
![]()
Transmitancja:
![]()
CZŁON RÓŻNICZKUJĄCY
Równanie różniczkowe wejście-wyjście:
![]()
k- współczynnik wzmocnienia określony jako stosunek odpowiedzi y do pochodnej wymuszenia u w stanie ustalonym,
T- stała czasowa = 0.
Charakterystyka skokowa:
![]()
Odpowiedź impulsowa:
![]()
Transmitancja:
![]()
CZŁON OSCYLACYJNY
Równanie różniczkowe wejście-wyjście:
![]()
lub
![]()
k- współczynnik wzmocnienia określony jako stosunek odpowiedzi y do wymuszenia u w stanie ustalonym,
![]()
- okres drgań własnych nie tłumionych,
![]()
- pulsacja drgań własnych nie tłumionych,
![]()
- względny współczynnik tłumienia ( ![]()
)
Charakterystyka skokowa:

przy czym
![]()
- pulsacja drgań własnych tłumionych
Odpowiedź impulsowa:
![]()
Transmitancja:
lub ![]()
CZŁON INERCYJNY DRUGIEGO RZĘDU
Równanie różniczkowe wejście-wyjście:
![]()
lub
![]()
k- współczynnik wzmocnienia określony jako stosunek odpowiedzi y do wymuszenia u w stanie ustalonym,
![]()
, ![]()
- stałe czasowe obiektu,
Transmitancja:
![]()
lub ![]()
![]()
![]()
, 
, ![]()
, 
, ![]()
![]()
![]()
CZŁON OPÓŹNIAJĄCY
Równanie różniczkowe wejście-wyjście:
![]()
![]()
- współczynnik wzmocnienia określony jako stosunek odpowiedzi y do wymuszenia u dla ![]()
,
![]()
- czas opóźnienia.
Charakterystyka skokowa:
![]()
Odpowiedź impulsowa:
![]()
Transmitancja:
![]()
Wyszukiwarka