1. ROZCIĄGANIE . PODSTAWOWE ZALEŻNOŚCI ( NAPRĘŻENIA, ODKSZTAŁCENIA, PRZEMIESZCZENIA)
Statyczna próba rozciągania- próba ta polega na powolnym rozciąganiu próbki aż do jej zerwania, wymuszając stałą prędkość przyrostu długości.
- równania równowagi
![]()
- warunki geometryczne ![]()
- związki fizyczne
2. ROZCIĄGANIE - OBLICZENIA WYTRZYMAŁOŚCIOWE
W obliczeniach wytrzymałościowych mamy trzy typy obliczen
- obliczenia sprawdzające Dane: N,A, σdop, σnieb; σnieb /σ = n
- wyznaczanie obiązenia dopuszczalnego Dane: A, σdop; Ndop = Aσdop
- wyznaczenie wymiarów ( dobór przekroju) Dane: N, σdop; A = N /σdop
3. WYKRES ROZCIĄGANIA STATYCZNA PRÓBA ROZCIAGANIA
FH- wartość siły na granicy proporcjonalności RH - granica proporcjonalności
Fspr- wartość siły na granicy spręzystosci Rspr - granica spręzystości
Fel - wartość siły dolnej granicy plastycznosci Rel - dolna granica plastycznosci
Feh - wartość siły gornej granicy plastycznosci Reh - gorna granica plastycznosci
Fm - największa siła rozciągająca dzialajaca na próbkę Rm - wytrzymałość na rozciaganie
Fu- sila wywołująca zerwanie Ru - naprężenia rozrywające
Próba polega na poddaniu odpowiednio ukształtowanej próbki działaniu siły rozciągającej w kierunku osiowym aż do jej zerwania. Przy próbie stat. Obciążenie wolno narasta z określoną prędkością. Próbę przeprowadza się na maszynach zwanych zrywarkami. Próbki posiadają część pomiarową o stałym przekroju i są zakończone główkami o zwiększonych wymiarach. Z pomiarów odkształceń na powierzchni ciała można wnioskować o odkształceniach wewnątrz ciała a z pomiarów całkowitej siły można wyliczyć naprężenia istniejące wewnątrz próbki. Próba rozciągania jest podstawową próbą wytrzymałościową
do - średnica początkowa próbki
du - średnica końcowa próbki
ΔL=Lu-Lo [mm] - bezwzględne wydłużenie próbki
Ap= ΔL/Lo 100% - względne wydłużenie próbki proporcjonalnej po zerwaniu
z=[do2-du2)/dr2]100% - względne przewężenie próbki okrągłej
Re=Fe/So [Mpa] - wyraźna granica sprężystości
Ru=Fu/Su[MPa] -naprężenie rozrywające
Rm=Fm/So [MPa] - wytrzymałość na rozciąganie
4. CHARAKTERYSTYKI GEOMETRYCZNE FIGUR PŁASKICH
a) momenty statyczne [m3]
![]()
b) środek ciężkości [m]
![]()
c) momenty bezwładności [m4]

d)moment dewiacji (zboczenia)[m4]
![]()
e)promień bezwładności [m]
![]()
5. GŁÓWNE CENTRALNE MOMENTY BEZWLADNOSCI. TWIERDZENIE STEINERA.
Moment bezwładności Io figury płaskiej względem ustalonego punktu 0, zwanego biegunem, definiuje się jako ![]()
gdzie ρ jest odległością elementu powierzchni o polu dA od punktu 0 (biegunowy mom. bezw.).
Centralne osie bezwładności - osie przechodzące przez srodek ciężkości przekroju.
Centralne momenty bezwładności - względem centralnych osi bezwładności.
Główne osie bezwładności - osie względem których moment dewiacji jest rowny 0.
Główne momenty bezwładności - względem głównych osi bezwładności
Główne centralne momenty bezwładności - względem głównych centralnych osi bezwładności
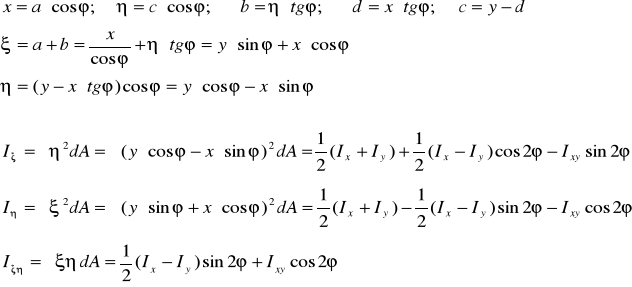
Główne osie bezwładności
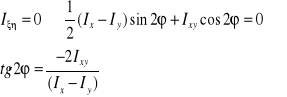
Główne momenty bezwładności
![]()
Twierdzenie Steinera.
Moment bezwładności figury płaskiej względem osi równoległej do centralnej osi (przechodzącej przez środek ciężkości ) równy jest sumie momentu bezwładności względem centralnej osi i iloczynowi pola powierzchni figury i kwadratu odległości pomiedzy osiami .
Iξ = Ix + Ab2, Iη = Iy + Aa2 , Iξη = Ixy + Aab
6. SKRĘCANIE. ZAŁOŻENIA. PODSTAWOWE ZALEŻNOŚCI ( naprężenia, odkształcenia, przemieszczenia)
Jeśli pręt obciążymy w płaszczyźnie prostopadlej do jego osi para sił o momencie K to sily wewnętrzne zredukuja się do momentu Ms którego kierunek jeste zgodny z osia preta. Moment Ms nazywany jest momentem skręcającym
Założenia
- przekrój płaski przed odkształceniem pozostaje płaski po odkształceniu
- nie ma odkształcenia w kierunku osi podłużnej pręta
- poszczególne przekroje tylko obracaj się względem osi podłużnej( względem przekroju sasidniego)
- materiał jest linowo sprężysty , obowiazuje prawo Hoocke'a
Podstawowe zależnośi
- warunki równowagi
![]()
- warunki geometryczne
![]()
- związki fizyczne ( równania konstytutywne)
Naprężenia styczne są proporcjonalne od odległości od srodka przekroju. Rozklad naprężeń w przekroju poprzecznym preta
- projektowanie
7. SKRECANIE OBLICZENIA WYTRZYMAŁOSCIOWE
![]()
8. ZGINANIE PROSTE PRETOW. ZAŁOŻENIA. PODSTAWOWE ZALEŻNOŚCI.
Założenia
- belka jest obciazona momentem gnacym lub silami poprzecznymi ( prostopadłymi do osi podłużnej , skupionymi lub rozłożonymi w sposób ciągły) wywołującymi moment gnący
- przekrój plaski przed odkształceniem pozostaje płaski po odkształceniu
- belki traktujemy jako zbior warstw ( włókien) ulegających skróceniu ( ściskaniu) lub wydłużeniu (rozciąganiu)
- istnieje warstwa obojetna która nie ulega odkształceniu.
- naprężenia w warstwie obojętnej są równe 0
- materiał jest linowo sprężysty - obowiazuje prawo Hooke'a
WARUNKI ROWNOWAGI
WARUNKI GEOMETRYCZNE
ZWIAZKI FIZYCZNE ( prawa konstytutywne )
PROJEKTOWANIE
9. ZGINANIE PROSTE PRETÓW - OBLICZENIA WYTRZYMAŁOŚCIOWE
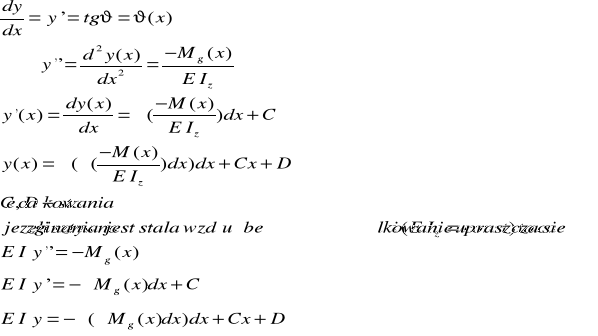
10. RÓWNANIE RÓZNICZKOWE OSI UGIETEJ
11. metoda clebscha - przyklad
12. Naprężenia w punkcie zależne od orientacji punktu.
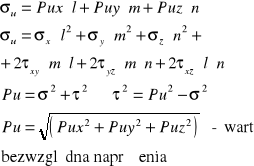
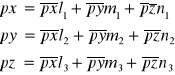
Wartość napr. w punkcie dowolnego przekroju ( równanie w postaci wektorowej) wynosi:
Pu = Px l + Py m + Pz n
l, m, n- cosinusy kierunkowe normalnej n
Składowe naprężenia:

Naprężenie normalne wynosi
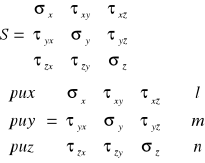
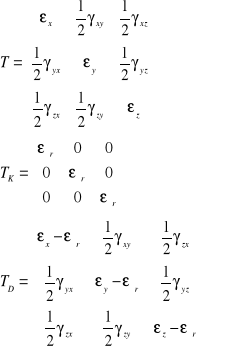
13. Składowe tensora stanu naprężenia.
Składowe tensora naprężenia.
Wielkość określona 3 wektorami - ![]()
, która przy zmianie układu osi transformuje się według formuł:
nazywamy tensorem.
![]()
- wektory stanu naprężenia
Tensor też może być określany składowymi algebraicznymi:
Dowolny tensor możemy rozbić na aksjator (część kulistą) i dewiator.
S=SK+SD SK- tensor kulisty
SD- dewiator
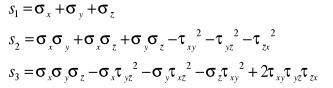
14. Równania równowagi stanu naprężenia.
Układając równania równowagi rozpatrujemy punkt obciążony siłami zewnętrznymi o wartościach x,y,z, oraz punkt w odległości nieskończenie małej od poprzedniego. Naprężenia składowe rozwijamy w szereg Taylora i po uproszczeniu otrzymamy:
15. Naprężenia główne i kierunki główne w ogólnym stanie naprężenia
Kierunki główne: określone przez oś u dla którego naprężenie styczne jest równe 0. Wtedy napr. normalne jest napr. całkowitym i nazywamy je napr. głównym
Płaszczyzna główna: pł. na której występuje naprężenie główne.
Na kierunku głównym zachodzi zależność
Pux = σ l ; Puy = σ m ; Puz = σ n
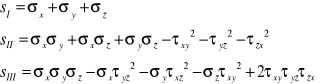
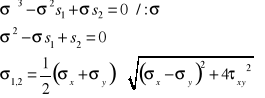
Równanie sekularne : σ3-σ2s1+σs2-s3 = 0 ; do wyznacznia naprężeń głównych σ1>σ2> σ3
Niezmienniki stanu naprężenia: kier. główne, napr. główne, współczynniki s1, s2 , s3
SI, SII, SIII - niezmienniki stanu naprężenia
16. Szczególne przypadki stanu naprężenia
1.Przestrzenne nierównomierne rozciąganie:
σ u=σ -> naprężenie normalne na dowolnej płaszczyźnie niezależne od orientacji.
Naprężenie całkowite Pu=σ , wtedy τu=0 napr styczne
Koła Mohra to punkty.
2.Płaskie równomierne rozciąganie
zał. σ1=σ2=σ>0 σ3=0
σu=σ - napr. normalne
τu=0 - napr. styczne
3.Jednoosiowe rozci*ganie
σ1=σ>0 σ2=σ3=0 σx=σ σy=0 τxy=0
Naprężenia dla dowolnie zorientowanej płaszczyzny wynoszą:
gdy: α=45° wtedy σξ=ση=1/2σ
τξη=τξηmax=-1/2σ
4.Ścinanie
σ1=σ σ2=-σ σ3=0
Napr. dla dowolnej płaszczyzny
σξ=σ cos2α
ση=-σ cos2α
τξη=-σ sin2α
Dla α=45°⇒ τξη=τξηmax=-σ oraz ση=σξ=0
17.Płaski stan naprężenia: gdy σ1≠0, σ2≠0, σ3=0 Płaski stan napr. opisany jest 3 składowymi σx , σy , τxy=τyx Równanie sekularne (jest funkcją kwadratową)
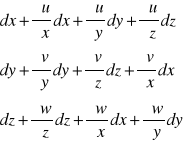
18. Teoria stanu odkszatałcenia
Pręt obciążony ulega przemieszczeniu (jego końce). Przemieszczenia końców pręta rozwijamy w szereg Taylora:
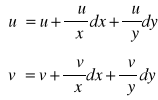
u, u' przemieszczenie względem OX
v, v' przemieszczenie wzgledem OY
19. Tensor stanu odkształcenia
T=TK+TD
TK - tensor kulisty
TD - dewiator
20. Odkształcenie główne i kierunkowe główne
Kierunki główne - kierunki w których odkształcenia postaciowe są równe 0 ( γ=0)
Dla każdego stanu odkształcenia można wyznaczyć 3 wzajemnie prostopadłe osie o kierunkach zwanych głównymi kierunkami stanu odkształcenia, dla których posunięcia będą równe zero.
Odkształcenia główne - odkształcenia εx, εy, εz na kierunkach głównych.
Niezmienniki stanu odkształcenia e1, e2, e3
ε3 - ε2e1 + e2 - e3 = 0
e1 = εx + εy + εz
e2 = εx εy + εyεz + εzεx - (1/4)(γ2xy + γ2yz + γ2zx )
e3 = εxεyεz + (1/4)( γxyγyzγzx ) - (1/4)( εxγ2yz + εyγ2zx + εzγ2xy)
21 . Uogólnione prawo Hooke'a.
-Uogólniony związek pomiędzy stanem naprężenia i odkształcenia.
Określamy związki pomiędzy E, G i υ

-Stała materiałowa dla ciała izotropowego.
Dla materiałów izotropowych uogólnione prawo Hooke'a wygl*da następuj*co:
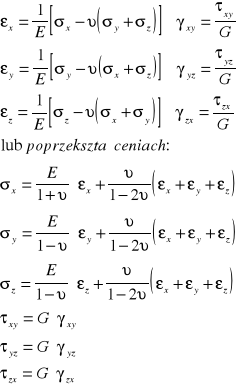
Kierunki główne stanu odkształcenia pokrywaj* się z kierunkami głównymi stanu naprężenia.
Stała Lame'go:
![]()
ν - liczba Poissona
G - moduł Kirchoffa
22. Moduł ściśliwości sprężystej
![]()
P=bśr/e - względna zmiana objętości
23. Dewiator i część kulista tensora stanu naprężenia i odkształcenia.
Dewiator to taki tensor 2giego rzędu dla którego suma elementów głównych przekątnych jest równa zero.
![]()
Z dowolnego tensora stanu naprężenia ![]()
zawsze można wyodrębnić tensor kulisty
albo ![]()
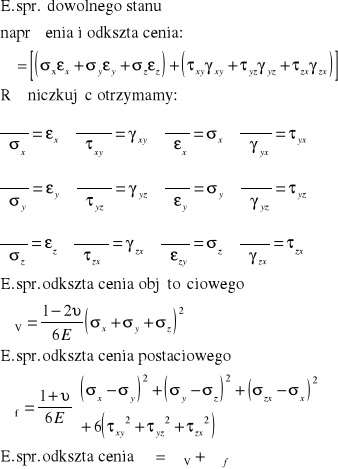
24. Energia sprężysta
Zasadę energii mówiącą o równości przyrostu energii kinetyczne ciała i pracy sił na to ciało działających należy wyrazić uwzględniając zarówno siły zewnętrzne jak i wewnętrzne.
![]()
![]()
E - przyrost energii kinetycznej
L - praca sił zew.
A - praca sił wew.
Praca sił wew. w materiale sprężystym jest odwracalna i określa się ją jako energie potencjalną wew. sił sprężystych lub krócej energią sprężystą
A = - V
ΔE+V=L
Energia sprężysta w stanie nie naprężonym i nie odkształcalnym jest równa zero. Ponieważ energię sprężystą obliczać będziemy dla stanu równowagi, wiec ΔE = 0 wówczas V = L
V - całkowita energia pręta
AL. - objętość pręta
25. Układy liniowo sprężyste
Układ sprężysty zdeformowany działaniem sił, po odciążeniu powraca do swoich poprzednich kształtów i wymiarów. Jeżeli przemieszczenie Δ dowolnego pk. układu wywołane zrównoważonym działaniem sił zew. P1, P2, ......Pn da się wyrazić jako funkcje liniową tych sił
Δ=![]()
to taki układ nazywamy liniowo sprężystym lub układem Clapeyrona. Współczynniki ![]()
określają wpływ jaki wywiera odpowiednia siła na przemieszczenie sprężyste Δ, nazywamy je liczbami wpływowymi przemieszczeń sprężystych. Wartości ich zależne są od kształtu i rozmiaru układu, od miejsca odniesienia sił, od sprężystych własności samego materiału, a nie są zależne od wartości siły. Aby układ można było uważać za liniowo sprężysty musi on spełniać następujące warunki:
marteriał musi być liniowo - sprężysty
układ jest w równowadze
brak tarcia na powierzchniach styku wzajemnie ruchomych części układu
przemieszczenia są tak małe, że nie wpływają w sposób godny uwzględnienia na skutki działania sił.

Liczby wpływowe można uznać za przemieszczenie wywołane odpowiednimi siłami o wartości jeden
26. Twierdzenie Betti'ego i Maxwella
-Tw. Bettiego o wzajemności prac. Suma prac wirtualnych układów sił Pi na odpowiadających na przemieszczeniach wywołanych przez układu sił Pj równa się sumie prac wirtualnych układu sił Pj na przemieszczeniach wywołanych układu sił Pi.
![]()
Tw. Maxwella o wzajemności przemieszczeń. Przemieszczenie pkt. Zaczepienia siły Pi wywołane przez siłę Pj i zrzutowane na kierunek działania siły Pi oraz przemieszczenie pk. zaczepienia siły Pi i zrzutowane na kierunek działania siły Pj są sobie równe, jeżeli Pi=Pj
27. Twierdzenie Castigliano i Menabrea - Castigliano
-Tw. Castigliano i jego zast. w obliczaniu przemieszczeń. Pochodna cząstkowa całkowitej energii sprężystej układu liniowo sprężystego względem siły ogólnejdziałającej w danym pkt. równe jest przemieszczeniu tego pkt. W kierunku działającej siły.
![]()
żnak + zwrot zgodny z kierunkiem działania siły, znak - niezgodny z kierunkiem działającej siły.
Tw. Menabrea - Castigliano.
W układzie liniowo sprężystym sztywnie podpartym pochodna cząstkowa energii sprężystej całego układu względem wielkości podporowej - hiper statycznej jest równa zero.
![]()
28. Metoda Maxwella-Mohra
Twierdzenie Maxwella-Mohra .
Uogólnieone przemieszczenie fi wynosi ![]()
Fi - uogólniona siła Fi
energia sprężysta
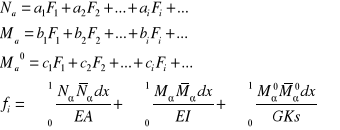
wzór Maxwela Mohra
![]()
siły wewnętrzne
29. Wytężenie materiału. Hipotezy wytężeniowe
Pojęcie wytężenia materiału.
Ogół zmian w stanie fizycznym ciała prowadzący do powstania trwałych odkształceń i zniszczenia spójności określono jako wytężenie. Stawia się hipotezę, że można utworzyć funkcję W określającą wytężenie. Jej argumentem są składowe stanu ośrodka ciągłego w danym punkcie (z reguły składowe stanu naprężenia σX , ..., τXY , ...) i parametry charakteryzujące materiał (C1,...)
W=F(σX , ..., τXY ,...,C1 ,...)
Naprężenie redukowane.
Naprężenie zredukowane odpowiada danemu stanowi naprężenia i jest porównywalne z jednokierunkowym stanem naprężenia.
Wytężenie to zagadnienie odpowiedności trój- lub dwukierunkowego stanu naprężenia z jednokierunkowym stanem naprężenia.
Hipotezy wytężenia.
1)Hipoteza największego naprężenia normalnego (Galileusz i Leibnitz). O wytężeniu decyduje max. naprężenie normalne (rozciągające lub ściskające)
a) Przestrzenny stan naprężenia.
σ1 <= σzr , σ2 <= σzr , σ3 <= σzr
σzc <= σ1 <= σzr , σzc <= σ2 <= σzr ,
σzc <= σ3 <= σzr
b)Płaski stan naprężenia σ3 = 0
σzc <= σ1 <= σzr ,
σzc <= σ2 <= σzr
c)Ścinanie
τmax = σ
σzc <= τmax <= σzr
2)Hipoteza najwiekszych odkształceń właściwych (de Saint-Vermont)
O wytężeniu decydują odkształcenia (wydłużenie właściwe)
ε1 <= εzr , ε2 <= εzr , ε3 <= εzr , εzc <= ε1 <= εzr
3)Hipoteza największych naprężeń stycznych
O wytężeniu decyduje
max. naprężenie
styczne
τmax = (σmax - σmin) /2
a)Rozciąganie osiowe - τmax = σred /2
b)Ogólny stan naprężenia - σred = σmax - σmin
-σzr <= σmax - σmin <= σzr
-σzr <= σ1 - σ2 <= σzr
-σzr <= σ2 - σ3 <= σzr
c)Płaski stan naprężenia - σ3 = 0
-σzr <= σmax - σmin <= σzr
- różne znaki σx , σy
![]()
σx σy <= τxy2
- te same znaki σx , σy
![]()
σx σy > τxy2
Szczególne przypadki:
I) σx = σ , σy = 0 , τxy = τ →![]()
II)Ścinanie
τxy = τ , σx = 0 , σy = 0 →![]()
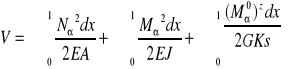
4)Hipoteza energetyczna
a)Miara wytężenia - całkowita energia sprężysta (Huber,Beltrami)
b)Miara wytężenia - energia odkształcenia postaciowego (Huber,Ses)
Dla dowolnego stanu naprężenia spowodowanego rozciąganiem:
Φf = (1+ν) /6E [(σx -σy)2+(σy -σz)2+(σz -σx)2+
+6(τxy2 +τyz2 +τzx2)]-energia odkszt.postac.
![]()
![]()
Dla płaskiego stanu naprężeń: σz = τyz = τzx = 0
![]()
Szczególne przypadki:
I) σx = σ , σy = 0 , τxy = τ ,![]()
II) Ścinanie: σx ,σy = 0 , τxy = τ ,![]()
30. HIPOTEZA NAJWIĘKSZYCH NAPRĘŻEŃ STYCZNYCH
(Tresci i de Saint Venanta)
![]()
![]()
31. UOGÓLNIENIE MOHRA HIPOTEZY NAJWIĘKSZYCH NAPRĘŻEŃ STYCZNYCH !!!
32. HIPOTEZY ENERGETYCZNE. HIPOTEZA ENREGII ODKSZTAŁCENIA
POSTACIOWEGO
(Hubera - Misesa)


33. ZGINANIE UKOŚNE
jeżeli ![]()
![]()
to ![]()
34. ŚCINANIE. WZÓR ŻURAWSKIEGO
Naprężenia normalne w dowolnym przekroju wyznacza się jak w prostym zginaniu równomiernym
W przekroju przesuniętym względem poprzedniego o dx moment gnący wzrośnie o dMg a naprężenie normalne o dσ.
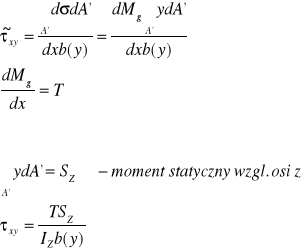
Wzór Żurawskiego pozwala obliczyć w sposób przybliżony wartość jednej składowej τXY naprężeń stycznych w przekroju pręta zginanego nierównomiernie.
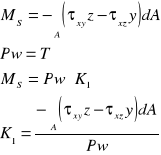
Środek ścinania.
K - środek ścinania (jeżeli w punkcie k przyłożymy siłę skupioną to nastąpi tylko zginanie bez skręcania)
Wpływ sił poprzecznych na przemieszczenie osi pręta.
Na osi pręta przemieszczenie υ jest równe ugięciu y zależnemu tylko od x
![]()
różniczkując jednokrotnie wzgl. x mamy:
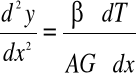
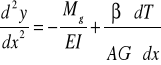
Równania te można uważać za równania różniczkowe osi odkształconej działaniem sił poprzecznych. Takie ujęcie pozwala nam wnieść poprawkę do równania różniczkowego osi ugiętej, które po uwzględnieniu działania sił poprzecznych przybiera postać:
35. ROZCIĄGANIE ZE ZGINANIEM
Siły wewnętrzne w przekroju : ![]()
- siła normalna
![]()
- moment gnący
Moment gnący nie pokrywa się z żadną z głównych centralnych osi bezwładności przekroju, czyli jest to zginanie ukośne. Wektor momentu rozkłada się na dwie składowe
![]()
, ![]()
Naprężenia można wyznaczyć na podstawie superpozycji z zależności
W trakcie odkształcenia pręta jego przekrój dokonuje obrotu wokół osi y oraz z i przemieszcza się w kierunku osi x. Ślad przecięcia się płaszczyzn przekroju po i przed odkształceniem wyznacza linię obojętną. Jest to miejsce geometryczne punktów przekroju, w których naprężenie normalne równa się zero.
![]()
oraz ![]()
i ![]()
w celu wyróżnienia punktów przekroju należących do linii obojętnej
gdzie 
, 
odcinki odcięte przez linię obojętną na osiach y i z

36. RDZEŃ PRZEKROJU
Zbiór punktów przyłożenia siły odpowiadających wszystkim liniom obojętnym stycznym do konturu przekroju pręta ogranicza obszar zwany rdzeniem przekroju.
Jest to miejsce geometryczne punktów przyłożenia siły, dla których naprężenia w całym przekroju mają jednakowy znak.
37. ZGINANIE ZE SKRĘCANIEM
![]()
naprężenia redukowane :
![]()
- hipoteza maksymalnych naprężeń stycznych
![]()
- hipoteza energii odkształcenia postaciowego
gdy N=0 rozpatrujemy zginanie ze skręcaniem 

dla przekroju kołowego Ws=2W
![]()
![]()
38. WYBOCZENIE SPRĘŻYSTE PRĘTÓW - WZÓR EULERA
Wyboczenie to wyginanie pręta spowodowane przekroczeniem przez siłę ściskającą wartości krytycznej.
Siła krytyczna Eulera:
Pkr = n2Π2EI / l2 (Wyboczenie sprężyste)
Dla n=1 Pkr = Π2EI / l2. EI -sztywność pręta;
n -ilość półfal sinusoidy krzywej ugięcia pręta
Siła krytyczna -najmniejsza siła po przekroczeniu której pręt utraci stateczność.
Końcowy wzór Eulera:
Pkr = Π2EI / lr2 [lr=αl, α-wsp. zależny od sposobu zamocowania (0,5do2).
Krzywa ugięcia pręta: y=Asin(πx/2), dla P=Pkr jest półfalą sinusoidy.
α=2 - Pkr/min, α=1/2 - Pkr/max
Naprężenie krytyczne:
σkr=Pkr /A → σkr=Π2EI / lr2A
Promień bezwładności: i2=I /A,
Smukłość pręta: λ=lr /i
Ostateczny wzór w zakresie wyboczenia sprężystego na napr. krytyczne (w zakresie stosowania prawa Hooke'a): σkr=Π2E /λ2
Graniczna wartość smukłości:
σkr=δH →Π2E /λ2=δH →λgr= Π![]()
Wyboczenie niesprężyste.
Naprężenia krytyczne wyznaczamy.
Dla λ<λgr ze wzorów empirycznych:
a) - Tetmajera-Jasińskiego: σkr = a-bλ,
b) - Johnsona-Ostanfelda: σkr = A-Bλ2,
a ,b, A, B - stałe materiałowe.
39. WYBOCZENIE SPRĘŻYSTO - PLASTYCZNE PRĘTÓW - RODZAJE APROKSYMACJI
40. ZAGADNIENIA BRZEGOWE TEORII SPRĘŻYSTOŚCI. SFORMUŁOWANIE, SPOSÓB
ROZWIĄZANIA
Podstawowe równania teorii sprężystości.
1. Warunki równowagi:

Równania ciągłości odkształceń (nierozdzielności odkształceń)
Wyrażenia określające związki geometryczne różniczkujemy obustronnie wzgl. x,y,z, sumujemy i otrzymujemy 6 równań nierozdzielności odkształceń

Równania przemieszczeniowe teorii sprężystości (Naviera-Lamego).
Wyrażając naprężenia za pomocą składowych stanu odkształcenia, równania równowagi wyrażamy za pomocą przemieszczeń. Równania takie nazywamy równaniami Lamego:

Równania naprężeniowe (Beltromiego - Michela).
Rozpatrujemy w płaskim stanie naprężenia element w kształcie pierścienia.
Pa,Pb - ciśnienie, które powoduje, że element przemieszcza się.
Rozpatrujemy nieskończenie mały wycinek pierścienia
r-promień, σr -naprężenie obwodowe, A', B', C' - punkty wycinka po przemieszczeniu
Rozpatrując siły na oś y otrzymujemy:
![]()
Równanie osi pionowej możemy przedstawić za pomocą przemieszczeń


41. Podstawy metody elementów skończonych. Założenia. Podstawowe zależności
Dyskretyzacja pręta za pomocą elementów skończonych.
MES jest to metoda ogólnie stosowanej mechaniki ośrodków odkształcalnych. Punktem wyjścia metody jest koncepcja zastąpienia ośrodka ciągłego układem dyskretnych elementów skończonych. Relacje jakie w układzie takim powinny być spełnione zapisuje się w postaci równań macierzowych a ich rozwiązanie jest możliwe jedynie za pomocą komputera. Podstawą rozwiązania zagadnienia układu liniowo sprężystego metodą MES jest równanie macierzowe: P=AU formułujące związki liniowe między przemieszczeniami U, a siłami P zdeterminowane przez macierz sztywności A.
Aproksymacja przemieszczeń za pomocą funkcji interpolacyjnych (f. Kształtu), całka ważona, sformułowanie słabe.
W metodzie elem. skończ. w ujęci Raybigha - Ridsa podstawowe równania metody wyprowadzamy ze sformułowania słabego przyjmując przybliżenie oraz zakładając że funkcja ważona w(e) wyrażona jest przez funkcję kształtu: W=Ne1 , W=Ne2 , W=Ne3 , W=Ne4 .
Otrzymuje się:
Macierz sztywności elementu skończonego
Macierz [Ke] jest macierzą sztywności elementu belkowego, natomiast macierz [Fe] jest macierzą kolumnową sił.
Agregacja elementów skończonych (warunki zgodności przemieszczeń i równowagi sił).
Jeżeli rozważany element skończony Ωe wstawimy do jego pierwotnego miejsca w pręcie to powinny być spełnione dwa następujące warunki: warunek zgodności przemieszczeń w węźle ue2 = ue+11 = ue+1 , warunek równowagi sił w węźle ae2 ÷ ae+11 ={0 gdy w węźle nie działają siły zewnętrzne, a0 gdy w węźle działa siła skupiona o wartości a0}.
42 i 43 . Elementy prętowe rozciągane i skręcane MES
![]()
dla 0<x<l
które należy uzupełnić warunkami brzegowymi u(0)=u0 ; (adu/dx)x=l = a0 gdzie a=a(x)=A(x)*E jest sztywnością na rozciąganie.
26
Mg
y'(x)
x
x
y
![]()
s
b
a
![]()
![]()
x
y
A
![]()
![]()
dA
d
b
a
c
![]()
x
y
![]()
![]()
x
y
![]()
dA
A
y
x
x
y
Wyszukiwarka