Przedmiotem badań był silnik asynchroniczny pierścieniowy o następujących danych znamionowych:
Układ pomiarowy - badany silnik pracował w układzie Leonarda.
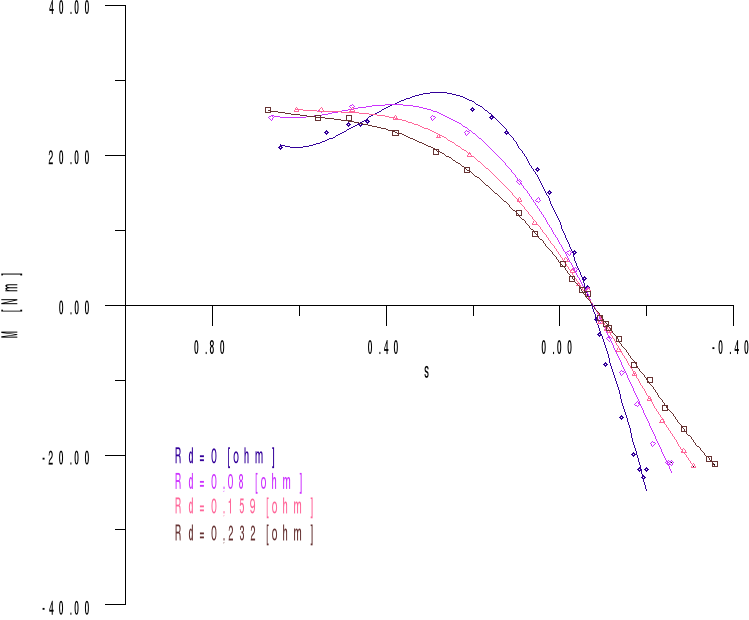
Pomiary do wyznaczania charakterystyk mechanicznych przy pracy silnikowej i prądnicowej przy różnych rezystancjach dodatkowych w obwodzie wirnika. Skojarzenie w gwiazdę, Uf=220 [V].
Wykresy M=f(s) dla różnych Rdw:
Pomiary dla określenia znamionowej sprawności metodą bezpośrednią.
Stojan |
Wirnik |
- |
Un=500 [V] |
Un=72 [V] |
Pn=2.2 [kW] |
In=7 [A] |
In=25 [A] |
nn=700 [obr/min] (p = 4) |
|
|
fn=50 [Hz] |
Silnik asynchroniczny pierścieniowy jest m.in. stosowany do napędu dźwignic w całym zakresie prędkości i udźwigów z wyjątkiem przypadków krańcowych. Przyczyna tego są jego właściwości, które pozwalają na spełnianie większości wymagań stawianych napędom dźwignicowym (moment krytyczny równy 2,5 MN ,możliwość zmiany momenty początkowego i regulacji prędkości poprzez zmianę rezystancji w obwodzie wirnika). Silnik ten posiada większą niż typowe maszyny pierścieniowe szczelinę powietrzną, co wpływa na zmniejszenie sprawności i zwiększenie prądu jałowego.
Obliczenie poślizgu:
Dane pomiarowe:
Silnik zwarty Rdw=0 [Ω] |
Rdw=0,08 [Ω] |
Rdw=0,159 [Ω] |
Rdw=0,232 [Ω] |
||||||||
n |
m. |
s |
n |
m. |
s |
n |
m. |
s |
n |
m. |
s |
[obr/min] |
[N*m] |
|
[obr/min] |
[N*m] |
|
[obr/min] |
[N*m] |
|
[obr/min] |
[N*m] |
|
250 |
21 |
0,64 |
235 |
25 |
0,66 |
275 |
26 |
0,61 |
230 |
26 |
0,67 |
325 |
23 |
0,54 |
315 |
26 |
0,55 |
315 |
26 |
0,55 |
310 |
25 |
0,56 |
360 |
24 |
0,49 |
365 |
26,5 |
0,48 |
365 |
26 |
0,48 |
360 |
25 |
0,49 |
380 |
24 |
0,46 |
495 |
25 |
0,29 |
435 |
25 |
0,38 |
435 |
23 |
0,38 |
390 |
24,5 |
0,44 |
550 |
23 |
0,21 |
505 |
22,5 |
0,28 |
500 |
20,5 |
0,29 |
560 |
26 |
0,20 |
635 |
16,5 |
0,09 |
555 |
20 |
0,21 |
550 |
18 |
0,21 |
590 |
25 |
0,16 |
665 |
14 |
0,05 |
635 |
14 |
0,09 |
635 |
12,25 |
0,09 |
615 |
23 |
0,12 |
715 |
7 |
-0,02 |
660 |
11 |
0,06 |
660 |
9,5 |
0,06 |
665 |
18 |
0,05 |
725 |
4,75 |
-0,04 |
710 |
6 |
-0,01 |
705 |
5,5 |
-0,01 |
685 |
15 |
0,02 |
745 |
2 |
-0,06 |
720 |
4,5 |
-0,03 |
720 |
3,5 |
-0,03 |
725 |
7 |
-0,04 |
765 |
-2 |
-0,09 |
730 |
2,75 |
-0,04 |
735 |
2 |
-0,05 |
740 |
3,5 |
-0,06 |
780 |
-4,5 |
-0,11 |
746 |
2 |
-0,07 |
745 |
1,5 |
-0,06 |
745 |
2,25 |
-0,06 |
800 |
-9 |
-0,14 |
765 |
-2,25 |
-0,09 |
765 |
-1,75 |
-0,09 |
760 |
-2 |
-0,09 |
825 |
-13,25 |
-0,18 |
775 |
-3,25 |
-0,11 |
775 |
-2,5 |
-0,11 |
765 |
-4 |
-0,09 |
850 |
-18,5 |
-0,21 |
780 |
-3,5 |
-0,11 |
780 |
-3 |
-0,11 |
775 |
-8 |
-0,11 |
875 |
-21 |
-0,25 |
795 |
-6 |
-0,14 |
795 |
-4,5 |
-0,14 |
800 |
-15 |
-0,14 |
880 |
-21 |
-0,26 |
820 |
-9,25 |
-0,17 |
820 |
-8 |
-0,17 |
820 |
-20 |
-0,17 |
|
|
|
845 |
-12,5 |
-0,21 |
845 |
-10 |
-0,21 |
830 |
-22 |
-0,19 |
|
|
|
865 |
-15,5 |
-0,24 |
870 |
-13,75 |
-0,24 |
835 |
-23 |
-0,19 |
|
|
|
900 |
-19,5 |
-0,29 |
900 |
-16,5 |
-0,29 |
840 |
-22 |
-0,20 |
|
|
|
915 |
-21,5 |
-0,31 |
940 |
-20,5 |
-0,34 |
|
|
|
|
|
|
|
|
|
950 |
-21,25 |
-0,36 |
Mając moc pobraną przez silnik z sieci oraz mierząc moment na wale i prędkość możemy określić sprawność maszyny.
|
|
Ustalony moment |
Ustalona prędkość |
Uzas_f |
[V] |
288 |
288 |
If |
[A] |
5,9 |
4,9 |
Ppobr |
[W] |
3000 |
2040 |
M. |
[N*m] |
30 |
20 |
n |
[obr/min] |
670 |
700 |
ω |
[rad/s] |
70 |
73 |
Podd |
[W] |
2105 |
1466 |
η |
[%] |
70,17 |
71,86 |
Prędkość kątowa:
Moc oddawana przez silnik: Sprawność:
Interpolowana sprawność dla PN:
1
Wyszukiwarka