CZŁON CAŁKUJĄCY IDEALNY
(wykonuje operację odwrotną) :
.
Równanie różniczkowe WE - WY: y = ku

K - współczynnik wzmocnienia prędkościowego, określany jako stosunek pochodnej odpowiedzi y do wymuszenia u w czasie ustalonym.
Charakterystyka skokowa (stała): h(t) = k t 1(t)
Odpowiedź impulsowa (pochodna): g(t) = k 1(t)
K
Transmitacja: g(`s) =
S'
Przykłady:
ZBIORNIK Z CIECZĄ
We - objętość cieczy dopływająca jednostce czasu ( g(t) )

Wy - poziom cieczy

G(t) d V(t)
G(t) =
dt
str. dopływający Szybkość narastania
objętości
wys. Słupa wody: h(t) * S = V(t)
d h(t)
S = g(t)
dt
t
h(t) = 1/s ∫ g(t) dt
0
2. Kondensator idealny.
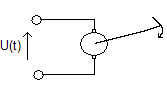
3. Układ napędowy pozycyjny.
CZŁON CAŁKUJĄCY Z INRCJĄ
.. .
Równanie różniczkowe WE - WY: Ty + y = ku
K - współczynnik wzmocnienia prędkościowego określany jako stosunek pochodnej odpowiedzi y do wymuszenia u w stanie ustalonym
T - stała czasowa
Charakterystyka skokowa:

t
h(t) = (kt - kT ( 1-exp [- ] ) ) 1(t) układ będzie dążył do całki
idealnej.
T
Odpowiedź impulsowa:
t
h(t) = k [ 1-exp [- ] ] 1(t)
T
K
Transmitacja: g(s) =
S(1+sT)
Przykłady:
1. OBCOWZBUDNY SILNIK PRĄDU STAŁEGO
Założenia: silnik nieobciążony, uwzględniamy tylko bezwładność
We - napięcie twornika
Wy - kąt położenia wału silnika
Ω(t) (WY - położenie kątowe)
α(t)

Ø - strumień jednego z uzwojeń
Const

DI(t)
U(t) = Rt * I(t) + Lt E(t)
dt
pomijam(małe)
dΩ(t)
Mn(t) - Mz(t) = I Mn(t) = Cm * Ø * I(t)
dt
Chcemy powiązać 2 wielkości: α(t) i U(t)
d α(t)
= Ω(t) No i manipulujemy, aby była zależność α(t) do U(t)
dt
dΩ(t)
Cm Ø Ω(t) * I(t) = J
dt
U(t) = Rt * I(t) + CE Ø Ω(t)
J dΩ(t)
I(t) = *
CM Ø dt
Rt * J d2 α dα
U(t) = * + CEØ
CmØ dt2 dt
CZŁON INERCYJNY II RZĘDU
Równanie różniczkowe: T1T2y'' + T1yt' + y = ku
Lub
TATBy'' + (TA+TB) y' + y = ku
K - współczynnik wzmocnienia określony jako stosunek odpowiedzi y do wymuszenia u w stanie ustalonym.
T1T2TATB - stałe czasowe.
K
Transmitacja: G(s) =
T1T2S2 + T1S + 1
Lub
K
G(s) =
TATBS2 + (TATB) s + 1
T1 - 4T2 >=0 __
____ 1 √T1
TB = √T1T2 , S = __
2 √T2
_____ TA + TB
T0 = √TATB , ζ = _____ , K = KA - KB
2 √TATB
KA
G1(s) =
1 + STA
KB
G2(s) =
1 + STB
Przykład:
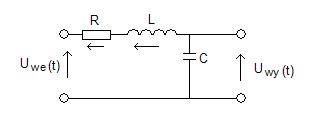
CZWÓRNIK R,C,
dI(t) 1 t
Uwe(t) = R * I(t) + L + ∫ I(t)dt
dt c 0
1 t dUwy
Uwy(t) = ∫ I(t) dt c = I(t) różniczkuje raz jeszcze
C 0 dt
dUwy d2Uwy d2Uwy dI
Uwe(t) = RC * + L C + Uwy C = =
dt dt dt dt
To czy układ będzie inercyjny II rzędu, czy oscylacyjny zależy od parametrów
CZŁON OPÓŹNIAJĄCY
Równanie różniczkowe: y(t) = ku( t - T0)
K - współczynnik wzmocnienia określony jako stosunek odpowiedzi y do wymuszenia u dla
t >T0
T0 - czas opóźnienia
Charakterystyka skokowa: h(t) = k 1(t - T0)
Odpowiedź impulsowa: g(t) = kδ(t - T0)
Transmitacja: g(s) = ex (-sT0)
CZŁON OSCYLACYJNY
Odpowiada na wymuszenie
1. Tłumione
2.Nie Tłumione
3. Narastanie.
TRANSMITACJA OPERATOROWA:
Transformata Laplace'a: ∞
F(s) = ∫ f(s) e-st = L[ f(t) ]
0
Orginały Laplace'owskie ( f(t) będzie orginałem, jak spełni 3 warunki):
1. f(t) = 0 t<0 Obserwacje prowadzimy w przód, nie bierzemy pod uwagę
przeszłości.
2. Funkcja ciągła i monotoniczna przedziałami.
3. f(t) <= m* e αt Można zrobić na funkcjach , które rosną, ale nie szybciej jak funkcja wykładnicza( np. et)2 nie da się jej ograniczyć);
Własności transformaty Laplace'a:
1. Złożenie dwóch operacji
L-1[L(f(t))] - f(t) , L[L-1(F(s))] = F(s)
α(1(t)) = 1/s , α-1(1/s) = 1(t)
1 1
L( e-αt * 1(t)) = , L-1 ( ) = e-αt * 1(t)
S+α S+α
Funkcje określam dla czasu T = 0
2. Liniowość:
Obowiązuje zasada superpozycji( odpowiedź na wymuszenie jest odpowiedzią na sumę tych wymuszeń.
L [a1f1(t) + a2f2(t)] = a1L[f1(t)] + a2L[f2(t)]
Przykłady:
( ejωt = cos ωt + j sin ωt)
( e-jωt = cos ω - j sin ωt)
1
sin ωt = ( ejωt - e-jωt)
2j
1 1 1 1 2jω ω
L { sin ωt * 1(t) } = ( - ) = * =
2j s-jω s+jω 2j s2 + ω2 s2 + ω2
ω
L { sin ωt } =
s2 + ω2
4
sin 4t =
s2 + 16
1 3
L-1 ( ) = L-1 ( ⅓ * ) = ⅓* sin 3t
s2 + 9 s2 + 9
3. Holomorficzność (funkcja, która ma pochodne):
dF(s) dF(s)
= -∫ t f(t) e-st dt czyli L[t f(t)] = -
ds. ds.
oraz
n! n!
L(fn) = , L(ten-αt) =
Sn+1 (s + α)n+1
L { t*1(t)} = 1/s
-1 1
- =
s2 s2
s+2 1 3 1 1 1 3 1
L-1 ( = L-1 (-2 * + * + * ) = (-2 + et+ e-t)1(t)
s(s2 - 1) s 2 s-1 2 s+1 2 2
3. Transformata pochodnej:
ω s
L (cos ωt) = L (1/ω(sin ωt)') = 1/ω *(s*L(sin ωt) - sin 0 ) = 1/ω * s * =
s2 + ω2 s2+ω2
Idea rachunku operatorowego
Mamy problem w dziedzinie czasu
Równanie L równanie wyznaczanie L wyznacznie
Dla orginału dla obrazu obrazu oryginału
Przykład: dI(t)
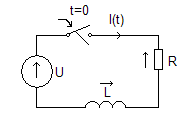
U *1(t) = R*I(t) + L
dt
równanie obrazu bo oper, różniczkowemu
odpow. mnożenie przez s.
*U1/s = R * I(s) + L*s*I(t)
u 1
I(s) = *
S R*SL
Rozw w dziedzinie Laplace'a
Faza końcowa - wyznaczenie oryginału.
1 K/R U/R
= 1/s + = -
s+R/L S s + R/L
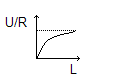
I(t) = U/R * (1 - e-(R/L)*t) * 1(t)
pisane
CZŁON RÓŻNICZKUJĄCY
.
Równanie różniczkujące WE/WY: y = ku
K - współczynnik wzmocnienia określony jako stosunek odpowiedzi y do pochodnej wymuszenia w stanie ustalonym
T - stała czasowa = 0
Charakterystyka skokowa: h(t) = uδ(t)
dδ(t)
Odpowiedź impulsowa: g(t) = k (pochodna z odpowiedzi skokowej)
dt
Transmitacja: g(s) = ks
Przykład:
(nie ma idealnych członów różniczkujących)
dU(t)
![]()
KONDENSATOR i(t) = c
dt
Uc(t) = 1/c ∫ i(t) dt
CZŁON RÓŻNICZKUJĄCY Z INERCJĄ
(rzeczywisty człon różniczkujący)
. .
Równanie różniczkujące WE-WY: Ty + y = ku
K - współczynnik wzmocnienia określany jako odpowiedź y do pochodnej wymuszenia u w stanie ustalonym
T - stała czasowa
k 1
Charakterystyka skokowa: h(t)= exp ( - ) 1(t)
T T
Odpowiedź impulsowa: k k 1
g(t)= δ(t) - exp( - ) 1(t)
T T2 T
ks
Transmitacja: g(s) =
1+sT
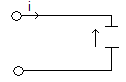
Przykład:
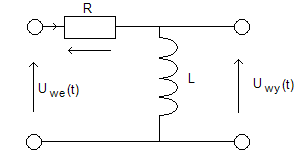
CZWÓRNIK R,L d I(t)
Uwe(t) = R * I(t) + L =
dt
= R I(t) + Uwy(t)
dI(t)
Uwy(t) = L
dt
d Uwe(t) d I(t) d Uwy(t)
= R +
dt dt dt
Równanie końcowe:
d Uwe R d Uwy . .
= * Uwy(t) + => u = k * y + y
dt L dt
Przykład **:
TRANSFORMATOR :
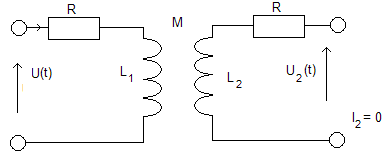
d I1
U1 = RI1 + L1
dt .
I
d I1
U2 = M
dt
. . ..
U1 = R1 I1 + L1 I
. R L1 .
U1 = U2 + U2 / M/R
M M


M . L1 .
U1 = U2 + U2
R R1
K T
Wyszukiwarka