POLITECHNIKA WARSZAWSKA
PODSTAWY KONSTRUKCJI URZĄDZEŃ PRECYZYJNUCH
PROJEKT 1
Temat: MODUŁ STOLIKA LINIOWEGO - 23
Wykonał: Dariusz Kidacki Gr. UL
Prowadzący: dr inż. Zbigniew Kusznierewicz
PROJEKT 1
Temat: MODUŁ STOLIKA LINIOWEGO - 23
Wykonał: Dariusz Kidacki, Gr.UL
KRÓTKI OPIS ZADANIA
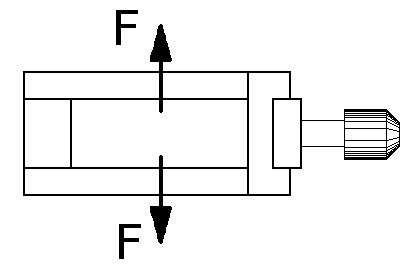
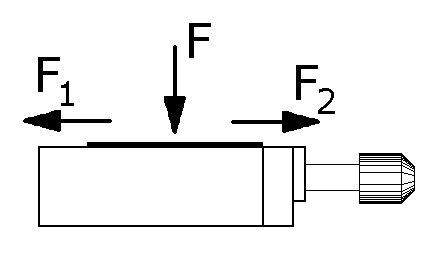
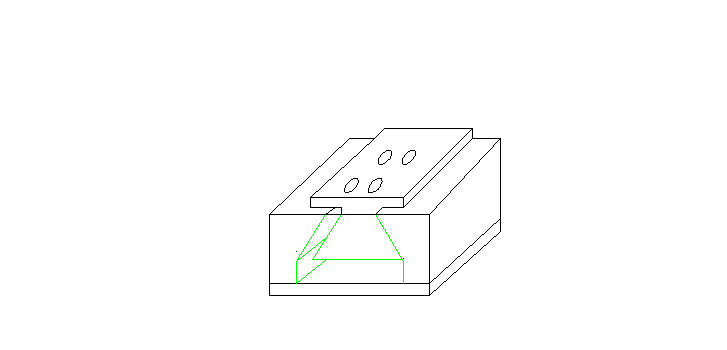
Zadaniem moim było sporządzenie projektu Modułu Stolika Liniowego o wymiarach 50x50 (wymiary podane w milimetrach), który porusza się wzdłuż jednej osi (posiada jednak możliwość pozwalającą dołączyć inne podobne zespoły dzięki którym możliwy będzie ruch w płaszczyźnie XY a nawet po odpowiednich modyfikacjach w płaszczyznach XYZ). Ruch stolika wywoływany jest przez poruszającą się głowice śruby mikrometrycznej. Stolik porusza się na prowadnicy typu jaskółczy ogon. Ze względu na zadane na zadane obciążenia : F = 50 [N], F1 = 10 [N], F2 = 25 [N] (patrz rysunek poniżej) zdecydowałem się użyć sześć układów wałków umieszczonych w separatorze. Poniżej zamieszczam także rysunek poglądowy stolika.
OBLICZENIA KONSTRUKCYJNE
Obliczam długość separatora:
S = a - 0.5L gdzie: a - długość stolika, L - zadany zakres ruchu
S = 40 [mm]
Obliczam siłe kasującą luz:
Fw = k*F gdzie: k - współczynnik zawierający się w przedziale(0.2 -0.4)
F - zadana siła
Fw = 15 [N] przyjąłem k = 0.3
Obliczam wartości składowych od siły Fw działających na poszczególne wałeczki:
Z zależności trygonometrycznych wynika:
Fsw = 18,31 [N]
Fnw = 10,5 [N]
Fmax1 = 0.5F + Fnw = 35,5 [N]
Fmax2 = Fsw + F/sin55 =79,35 [N]
Z obliczeń wynika, że na wałek drugi będzie przenosił dużo większe obciążenia
Wybieram wałeczki o wymiarach r = 1 [mm] i l = 4.8 [mm]
Obliczam maksymalne obciążenie jakie może przenieść pojedyńczy zespół wałków ze wzoru HERTZA
PHMAX = 0.564 [Fn / {r * l*((1 - v12 / E1) + (1 - v22 / E2))2}]1/3 = 16 [N]
Gdzie: Fn - maksymalna siła jaką może przenieść wałek
v1, v2 - liczba Poissona dla stali
E1, E2 - moduł sprężystości prowadnicy i kulki
Opierając się na tych obliczeniach zakładam konieczność użycia sześciu zespołów wałków ponieważ 6*16[N] > 79,35 [N]
Obliczam minimalną siłę potrzebną do przesunięcia stolika
Pmin > (F1 + Tc ) gdzie: F1 - zadane obciążenie, Tc - całkowite
opory ruchu,
mobl - wsp. tarcia zawarty w (0.0015 - 0.003)
Tc = mobl*Fmax1*(1 + cos55/sin55) + 2*mobl*Fw*(1 + cos55/sin55)
Tc = 0.67 [N]
Więc do obliczeń przyjąłem mobl =0,0025
Pmin > 5,67 [N]
Obliczenia konstrukcyjne związane ze sprężyną
Ppocz > Pmin przyjmuje siłę początkową Ppocz = 7 [N]
Pk = (1.3 - 2)*Ppocz siła końcowa będzie równa czternastu Niutonom
Pk = 2*7 [N] = 14[N]
Pgr = Pk / (1 - si) gdzie współczynnim si zawiera się w przedziale(0.05 - 0.1)
Obieram si równe 0.08
Pgr = 15.22 [N]
Ponieważ zakładam użycie sprężyny z napięciem początkowym zatem
P0 < Pgr / 3
P0 = 5 [N]
Obliczam strzałkę wydłużenia f
fz = L(Pk - P0) / (Pk - Ppocz) zatem
fz = 9.6 [mm]
Obliczam strzałkę wydłużenia f0
f0 = L*P0 / (Pk - Ppocz) zatem
f0 =5.4 [mm]
Obliczam strzałkę wydłużenia całkowitego
f = fz +f0 zatem
f =15 [mm]
Zakładam wskaźnik sprężyny w = 10. Wskaźnik powinien zawierać się w przedziale (7 - 12)
w = D /d gdzie: D - Średnia średnica sprężyny, d - średnica drutu sprężyny
Obliczam współczynnik poprawkowy - k ze wzoru:
k = 1 +5/4(1/w) + 7/8(1/w)2 + (1/w)3
k = 1.172
Obliczam średnice drutu d ze wzoru:
d = 8*Pk*w*k / ks*Pi gdzie: ks - dopuszczalne naprężenie na skręcanie,
przyjmuje ks równe 600[Mpa], Pi ~ 3.14
d = 0.74[mm]
Zaokrąglam w górę do najbliższej wartości katalogowej czyli d = 0,8[mm]
Obliczam średnią średnice sprężyny D ze wzoru
D = w*d zatem
D = 6,4 [mm]
Obliczam ilość zwojów czynnych Zc ze wzoru:
Zc = G*d*f / 8*Pk*w3 gdzie: G wynosi 8*104 [Mpa]
Zc = 6.64
Przyjmuje więc, że jest 7 zwojów czynnych. Dodatkowo używam jednego (po połowie na każdą ze stron ) zwojów jako mocowanie do śrub.
Obliczam wydłużenie sprężyny nieobciążonej
l0 = Zc* d + z gdzie: z = D (dodatkowy zwój na mocowanie)
l0 = 12[mm]
Obliczam wydłużenie na końcu skoku roboczego lk
lk = l0 - f0 +f zatem
lk = 22 [mm]
Obliczam długość sprężyny na początku skoku roboczego l1
l1 = lk - L zatem
l1 = 17[mm]
Obliczam z jaką działa głowica śruby mikrometrycznej na stolik
Ze wzoru Hertza mamy:
PHMAX = 0.578 [Fn / {r 2((1 - v12 / E1) + (1 - v22 / E2))2}]1/3 = 7 [N]
Gdzie r jest promieniem czaszy którą zakończona jest głowica mikrometryczny i
Wynosi:1,5[mm]
MONTAŻ DRUGIEGO MODUŁU
W celu stworzenia manipulatora mającego możliwość poruszania się wzdłuż drugiej osi tworzącej płaszczyznę w której porusza się blat stolika należy:
Obydwa stoliki cofnąć do położenia początkowego (tzn. śruba mikrometryczna nie wywiera nacisku na stolik).
Położyć jeden stolik na drugim (`na krzyż' tzn. aby jeden był względem drugiego obrócony o90[stopni])) tak aby otwory wywiercone w blatach pokrywały się .
Za pomocą dołączonych śrub przytwierdzić jeden stolik do blatu drugiego.
UWAGI KOŃCOWE
Blokada ruchu w powyższym projekcie stolika liniowego nie jest konieczna ponieważ zastosowałem śrubę mikrometryczną o zakresie ruchu pokrywającym się całkowicie z zadanym zakresem ruchu stolika. Biorąc jednak pod uwagę możliwość niedokładnego zamocowania śruby mikrometrycznej w przystawce( co wydaje się mało prawdopodobne ze względu na konstrukcje przystawki przystosowanej specjalnie do obranej głowicy mikrometrycznej ) zaplanował milimetr luzu pomiędzy końcowym położeniem stolika a płyta zamykającą konstrukcje.
Wszelkie wzory jak również zakresy stałych użytych bo powyższych obliczeń zaczerpnięte są z wykładu prowadzonego przez pana prof. dr hab. Waldemara Oleksiuka jak również z ćwiczeń projektowych prowadzonych przez pana prof. dr. hab. Zygmunta Rymuze .
Wyszukiwarka